Изобретение относится к рельсовому транспорту, в частности к способу определения местоположения движущегося транспортного средства.
Известны способы измерения пройденного пути железнодорожным составом (см. Сводный том 11 Железнодорожный транспорт 11 Д. Автоматика, телемеханика и связь на железных дорогах, 2000 г., №5, заявка №19729981 Германия, МПК 6 G 01 С 22/00/ Mindel К.; Alcatel Alsthom Со. Generale d’Electricite. - №197299814; Заявл. 12.07.97; Опубл. 14.01.99 "Способ измерения пройденного пути и скорости движения железнодорожного подвижного состава"). Измерение скорости движения железнодорожного подвижного состава и пройденного им пути основано на системе сенсоров, устанавливаемых на борту подвижного состава, и расположении на пути специальных маркеров.
Наиболее близким техническим решением к предлагаемому способу является способ определения препятствий на пути движения рельсовых транспортных средств, например поездов (см. Сводный том 11 Железнодорожный транспорт 11 Д. Автоматика, телемеханика и связь на железных дорогах, 2000 г., №5, заявка №19746970 Германия, МПК 6 В 61 L 23/00/ Uebel H.; Alcatel. - №197469701; Заявл. 24.10.97; Опубл. 29.04.99 "Способ определения препятствий на железнодорожных путях"). На борту транспортного средства устанавливается ЭВМ, в памяти которой содержится информация о местности, по которой проходит трасса, и о фиксированных опорных пунктах с известными координатами. Для этого на локомотиве устанавливается также специальный сенсор для измерения расстояний и угла поворота, определяемых с помощью отражателей, оборудованных вдоль пути.
Задачей, на решение которой направлено изобретение, является определение местоположения движущегося транспортного средства, путем установки вычислительного комплекса (ЭВМ) и дополнительных периферийных устройств на борту объекта. В памяти ЭВМ содержится информация в виде упорядоченного массива данных о местности, по которой проходит трасса, и фиксированных опорных пунктах с известными координатами. Основополагающим элементом массива данных является информация о координатах размещения вдоль железнодорожного пути фиксаторов контактной подвески.
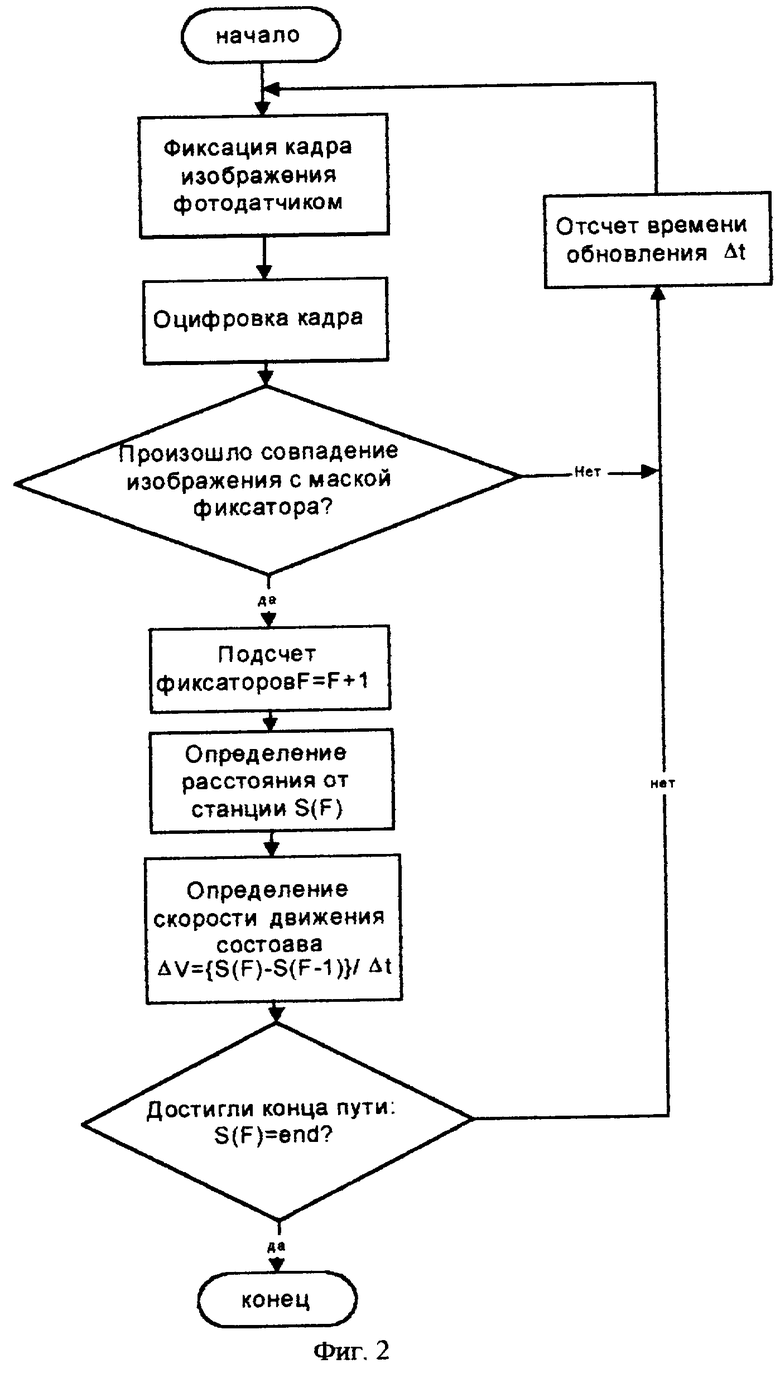
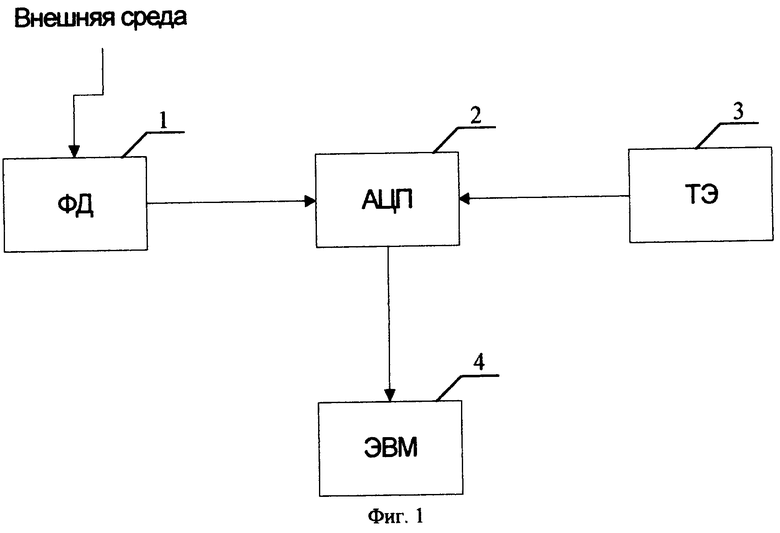
Концептуальная схема системы предлагаемого способа представлена на фиг.1. Среди дополнительных устройств, необходимых для сбора и преобразования информации, поступающей в ЭВМ 4, присутствуют: фотодатчик 1, например видеокамера, аналого-цифровой преобразователь видеосигнала 2, тактирующий элемент 3 для отсчета интервалов времени синхронизации работы системы. Алгоритм функционирования системы под управлением программного обеспечения, заложенного в ЭВМ, изображен на фиг.2 в виде блок-схемы и представляет собой следующий порядок действий.
С фотодатчика непрерывным потоком поступает информация в формате видеосъемки достаточного разрешения для различения пересечения фиксатора контактной подвески и самой подвески. По сигналу от тактирующего элемента аналого-цифровой преобразователь видеосигнала производит фиксацию (захват) кадра изображения фотодатчика. Следующий шаг алгоритма - оцифровка кадра. Передача кадра в ЭВМ. Проведение анализа сравнения с шаблоном изображения (маской фиксатора). При отрицательном решении возврат к началу алгоритма и ожидание тактирующего сигнала. При положительном решении сравнения идет наращивание значения переменной, отвечающей за хранение порядкового номера текущего фиксатора контактной подвески на данном маршруте следования. На основе полученного номера происходит выборка данных по точке маршрута. Следующий шаг - вычисление зависимостей изменения расстояния и скорости от времени. Заключительный шаг алгоритма - определение конечной точки пути. При отрицательном решении возврат к началу алгоритма и ожидание тактирующего сигнала. При положительном решении сравнения происходит завершение алгоритма.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ ПОГРЕШНОСТЕЙ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2242392C2 |
| СПОСОБ ПОИСКА МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ ПО ИНДУЦИРОВАННОМУ ИЗЛУЧЕНИЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2169386C1 |
| Система и способ дистанционного контроля и регистрации технологических операций на транспорте | 2020 |
|
RU2744500C1 |
| СПОСОБ ОХРАННОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ ВИДЕОНАБЛЮДЕНИЯ | 2004 |
|
RU2260209C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА УЧАСТКАХ С ЭЛЕКТРИЧЕСКОЙ ТЯГОЙ | 2020 |
|
RU2738487C1 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2013 |
|
RU2538322C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ (ВАРИАНТЫ) | 2008 |
|
RU2373095C1 |
| Система управления движением поездов в режиме виртуальной сцепки | 2024 |
|
RU2828911C1 |
| СИСТЕМА КОНТРОЛЯ МЕСТОНАХОЖДЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2284938C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИЗМЕРЕНИЙ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК И ВЫЯВЛЕНИЯ ВАГОНОВ С ОТРИЦАТЕЛЬНОЙ ДИНАМИКОЙ | 2015 |
|
RU2582761C1 |
Изобретение относится к технике определения местоположения подвижных составов или поездов. На борту, например локомотива, устанавливают ЭВМ, в память которой вводят информацию о местности, по которой проходит трасса, и фиксированных опорных пунктах с известными координатами. Дополнительно на локомотиве устанавливают фотодатчик, например видеокамеру, посредством которой осуществляют видеосъемку фиксаторов контактной подвески. Информацию выдают с разрешением, достаточным для различения пересечения фиксатора контактной подвески и самой подвески. Аналого-цифровым преобразователем видеосигнала осуществляют захват кадра изображения от видеокамеры, оцифровку кадра и передачу его в ЭВМ, где сравнивают кадр с маской фиксатора. При положительном результате сравнения наращивают значения переменной, отвечающей за хранение порядкового номера фиксатора контактной подвески на данном маршруте следования, и на основе полученного номера производят выборку данных по точке маршрута. Изобретение позволяет определять местоположение движущегося рельсового транспортного средства с повышенной точностью без установки дополнительных датчиков пути. 2 ил.
Способ определения местоположения движущегося рельсового транспортного средства, заключающийся в том, что на борту, например локомотива, устанавливают ЭВМ, в память которой вводят информацию о местности, по которой проходит трасса, и фиксированных опорных пунктах с известными координатами, отличающийся тем, что на локомотиве дополнительно устанавливают фотодатчик, например видеокамеру, посредством которой осуществляют видеосъемку фиксаторов контактной подвески и выдают информацию с разрешением, достаточным для различения пересечения фиксатора контактной подвески и самой подвески, аналого-цифровым преобразователем видеосигнала осуществляют захват кадра изображения от видеокамеры, оцифровку кадра и передачу его в ЭВМ, где сравнивают кадр с маской фиксатора, при положительном результате сравнения наращивают значения переменной, отвечающей за хранение порядкового номера фиксатора контактной подвески на данном маршруте следования, и на основе полученного номера производят выборку данных по точке маршрута.
| DE 19746970 А1, 29.04.1999 | |||
| КУКЛА СУВЕНИРНАЯ | 1999 |
|
RU2166344C1 |
| Кассета для бесконечной магнитной ленты | 1974 |
|
SU515147A1 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА | 1998 |
|
RU2122239C1 |

