Область техники, к которой относится изобретение.
Способ коррекции погрешностей определения местоположения рельсового транспортного средства и устройство для его реализации (в дальнейшем по тексту способ и устройство для его реализации) относятся к области железнодорожной автоматики и телемеханики, а именно к системам управления движением рельсовых транспортных средств (РТС), и предназначены для периодической корректировки данных о местоположении транспортного средства, полученных с использованием бортовой измерительной аппаратуры.
Уровень техники.
Общей особенностью систем интервального регулирования движения поездов, использующих для определения местонахождения поезда на перегоне бортовую аппаратуру (датчик скорости и пройденного пути), является невысокая точность последней. Это объясняется, в свою очередь, спецификой используемого способа коррекции погрешностей определения местоположения РТС.
Измерение пути бортовым устройством, как правило, осуществляется посредством развертки круга катания измерительного колеса РТС, обычно являющегося одновременно и ведущим колесом [1]. Поэтому в процессе движения РТС накапливаются ошибки измерения, обусловленные следующими факторами:
- износом бандажа колесной пары, являющегося мерой длины пути, и, как следствие, постепенное изменение его диаметра;
- разбросом диаметров бандажей колесных пар, обусловленным технологией их изготовления;
- проскальзыванием колес при ускорении или замедлении РТС, а также при прохождении им криволинейных участков пути.
При этом погрешности в определении фактической координаты местоположения РТС могут достигать неконтролируемо большой величины в случае потери сцепления между измерительной колесной парой и рельсом при торможении юзом или при буксовании. Поэтому в системах интервального регулирования подобного типа обязательно предусматривается корректировка результатов измерения, произведенных бортовым устройством РТС, с использованием корректирующих точек, координаты местоположения которых известны и привязаны к пути.
Известен способ коррекции погрешностей определения местоположения рельсового транспортного средства комплектом бортовой аппаратуры с использованием корректирующих точек [2]. Сущность способа-аналога заключается в том, что перегон делится на отрезки известной длины. По границам отрезков устанавливаются точечные путевые датчики, определяющие их фактические координаты. При движении РТС в момент прохождения какого-либо датчика на локомотиве фиксируется его порядковый номер, который однозначно определяет фактическую координату местоположения подвижной единицы, в результате чего локомотивные устройства измерения пути осуществляют корректировку результатов измерения, приводя их в соответствие с фактической координатой местоположения корректирующей точки. Чтобы локомотивная аппаратура могла отличить датчик данной корректирующей точки от других датчиков, условный номер каждого датчика имеет свой индивидуальный набор признаков. В [2] предлагается использовать два признака, что обеспечивается чередованием точек расположения смежных датчиков относительно железнодорожной колеи (первый признак - наличие датчика, второй признак - расположение датчика).
Недостатками известного способа коррекции погрешностей определения местоположения рельсового транспортного средства являются повышенные эксплуатационные издержки, обусловленные необходимостью использования напольного оборудования и организации канала связи между напольными и бортовыми устройствами.
Из известных способов-аналогов способ коррекции погрешностей определения местоположения рельсового транспортного средства комплектом бортовой аппаратуры с использованием корректирующих точек [2] является наиболее близким по своей сути.
Сущность изобретения.
Заявленный способ коррекции погрешностей определения местоположения рельсового транспортного средства комплектом бортовой аппаратуры с использованием корректирующих точек, предусматривающий корректировку результатов измерения пройденного пути на основе сравнения его измеренного значения с координатами местоположения корректирующих точек, отличается от прототипа тем, что произвольно выбранные корректирующие точки на пути, требующие применения напольного оборудования и канала связи с комплектом бортовой аппаратуры для их идентификации, заменены на виртуальные, в качестве которых используются такие элементы изменения плана и профиля железнодорожного пути, как кривые, прямые участки и порядок их чередования, в том числе переломы плана и профиля. Идентификационными параметрами корректирующих точек при этом являются следующие характеристики плана и профиля пути:
1. Угол и знак угла поворота кривой ϕ.
2. Длина кривой ln.
3. Максимальная крутизна угла поворота кривой  где ∂ωmax - максимум угловой скорости на данном повороте, ∂V - линейная скорость рельсового транспортного средства.
где ∂ωmax - максимум угловой скорости на данном повороте, ∂V - линейная скорость рельсового транспортного средства.
4. Если участок пути представляет собой несколько следующих непрерывно друг за другом криволинейных участков, то дополнительно к параметрам 1-3, измеряемым для каждой кривой в отдельности, идентификационным параметром участка пути такого типа является порядок чередования и число криволинейных участков.
5. Расстояния от предыдущих корректирующих точек (зафиксированных бортовой аппаратурой криволинейных участков).
Определение числовых величин вышеуказанных характеристик изменения плана пути осуществляется измерением параметров вращения внутренней подвижной системы координат, жестко связанной с РТС, относительно внешней неподвижной системы координат, привязанной к поверхности Земли. Заявленный способ представляет собой следующую последовательность действий:
1. Идентификация очередной виртуальной корректирующей точки.
2. Счисление пройденного пути от очередной (последней идентифицированной) виртуальной корректирующей точки.
3. Приблизительное определение пути, который еще необходимо пройти РТС до достижения следующего по ходу движения участка изменения плана и(или) профиля пути, характеристики которого могут быть непосредственно зафиксированы бортовой аппаратурой (ожидание криволинейного участка).
4. Идентификация начала участка изменения плана и(или) профиля пути криволинейного участка пути, в том числе определение и сверка направления реального поворота системы координат локомотива с направлением ее ожидаемого поворота.
5. Идентификация наиболее информационных отрезков внутри участка изменения плана и(или) профиля пути (в первую очередь горба) путем нахождения величины F на каждом дискретном отрезке кривой, отбора ее максимальных значений и сверки этих величин с ожидаемыми значениями.
6. Вычисление корректирующей точки, линейная координата которой будет в дальнейшем использоваться для коррекции (выбирается точка на отрезке, координата которой заранее определена, например начало или конец).
7. В момент прохождения вычисленной корректирующей точки - временное присвоение РТС ее линейной координаты.
8. Идентификация окончания кривой, итогом которой является определение оставшихся параметров кривой (длины, угловой величины, оставшихся информационных отрезков и т.д.).
9. Окончательная идентификация кривой, то есть сверка полученных в результате непосредственного измерения параметров кривой величин с теми, которые ожидались.
10. Если идентификационный участок представляет собой несколько непрерывно чередующихся кривых, то для следующих кривых повторение 4-9 за исключением 7.
11. Выбор наиболее информативных и точных виртуальных точек коррекции (F=max).
12. В случае, если поворот окончательно не распознан, то отмена временной коррекции и переход к шагу 2, иначе переход к шагу 13.
13. Окончательное присвоение линейной координаты вычисленной (выбранной из вычисленных) виртуальной корректирующей точки.
14. Переход к шагу 1.
Порядок расположения виртуальных корректирующих точек при заданном направлении движения представлен на фиг.1, где обозначены: 1 - виртуальные точки коррекции, 2 - точки начала идентификации криволинейных участков, 3 - точки окончания идентификации криволинейных участков, 4 - прямые участки пути, 5 - направление движения.
Предлагаемый способ коррекции координаты подвижного состава возможен благодаря специфике железнодорожного транспорта, заключающейся в том, что у движущегося по железнодорожному пути РТС имеется только одна степень свободы [4], определяемая конфигурацией железнодорожного пути, жестко привязанного к местности. То есть все РТС, идущие по одному маршруту, в разные моменты времени проходят одни и те же точки пути (местности) и, более того, движутся в пространстве по одним и тем же кривым. В существующих системах эффект вращения подвижной системы координат относительно опорной используется для определения угловых параметров движения объекта контроля [3], тогда как для определения текущих линейных координат и коррекции местоположения этот способ отдельно не применяется. Это обусловлено тем, что большинство наземных и воздушных объектов имеют более одной степени свободы. В результате одним и тем же угловым координатам может соответствовать различное положение объекта на местности.
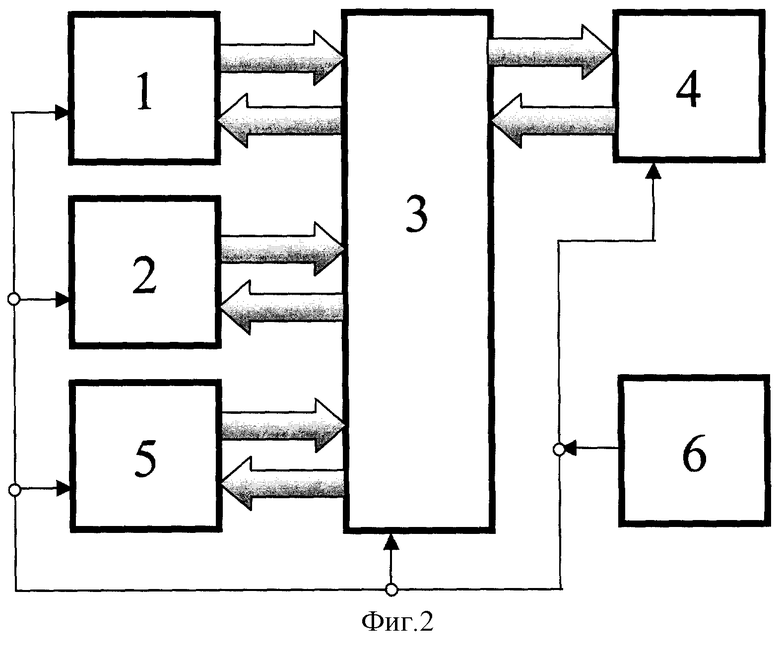
Устройство для реализации заявленного способа коррекции погрешностей определения местоположения рельсового транспортного средства представлено на фиг.2.
Устройство состоит из следующих блоков. Блок измерения скорости, ускорения и пройденного пути 1. Блок измерения углов поворота системы координат, образуемой РТС 2. Выходы обоих блоков подключены к входу схемы сопряжения с ЭВМ 3. Выход схемы сопряжения 3 подключен к ЭВМ 4. Кроме того, к узлу 4 подключено устройство внешней памяти 5. Все вышеперечисленные узлы соединены с выходом блока питания 6.
Работает устройство следующим образом. При движении РТС по перегону из блока 1 посредством схемы сопряжения 3 в бортовую ЭВМ непрерывно (с высокой дискретностью) поступает кодовая последовательность, пропорциональная пройденному РТС пути, его текущей скорости, ускорению и текущему направлению движения, которая переводится ЭВМ в необходимые единицы измерения путем домножения на поправочные коэффициенты. Необходимо отметить, что данная часть устройства работает непрерывно и независимо от того, по какому участку пути движется РТС. Блок 2 работает только при вхождении РТС на очередной криволинейный участок, тогда как на прямых участках информация от этого блока не поступает (отсутствует вращение системы координат РТС). Поэтому рассмотрим прохождение РТС кривой.
При вхождении подвижной единицы на криволинейный участок начинается вращение системы координат, образуемой РТС, поэтому на выходе блока 2 появляется кодовая последовательность, содержащая информацию о величине поворота системы координат РТС, скорости вращения системы координат РТС и направлении вращения системы координат РТС. Информация, выработанная блоком 2, поступает через схему сопряжения 3 в ЭВМ 4.
Дальнейшая обработка осуществляется в ЭВМ. Путем вычисления отношения мгновенной угловой скорости к мгновенному значению линейной скорости дополнительно к данным, полученным от блоков 1 и 2, определяется крутизна кривой в различных точках (по равенству нулю этого отношения определяется окончание кривой, а по максимуму - горб (середина)).
Идентификационная информация обо всех участках изменения плана и(или) профиля пути на данном маршруте хранится во внешней памяти 5. Поэтому по мере появления в процессе прохождения кривой новой информации ЭВМ может производить сравнение ее с эталоном из памяти, идентифицируя кривую со все большей надежностью. Наибольшая надежность наступает после прохождения криволинейного участка в результате идентификации последнего сразу по множеству признаков.
Следующим этапом производится окончательная корректировка местоположения путем извлечения из внешней памяти 5 координаты корректирующей точки, находящейся внутри идентифицированной кривой (начало корректировки начинается при прохождении горба, так как именно в этой части поворота наблюдается максимум отношения угловой скорости к линейной, а значит более высока точность).
Далее процесс повторяется, но уже на следующем криволинейном участке.
Наряду с вышеуказанным эффектом данное устройство коррекции позволяет определять состояние верхнего строения пути и состояние ходовой части локомотива, в том числе подвески, а также контролировать постепенное изменение состояния.
Сведения, подтверждающие возможность осуществления изобретения.
Реализация предложенного способа коррекции погрешностей определения местоположения рельсового транспортного средства сводится к решению задачи получения неподвижной системы координат, относительно которой производятся измерения.
Для получения "неподвижной" системы координат можно использовать гироскопический эффект, сущность которого заключается в том, что быстро вращающийся маховик стремится сохранять свою ось вращения неподвижной в инерциальном пространстве, либо за неподвижную систему координат можно принять расположение магнитных меридианов Земли (по направлению магнитной стрелки в магнитном поле Земли), возможен и комбинированный вариант [3].
Все узлы, необходимые для осуществления устройства, реализующего способ коррекции:
1) блок измерения пройденного пути - различные скоростемеры и счетчики пройденного пути;
2) блок измерения угловых координат и ускорений - гирокомпасы, гиромагнитные компасы, магнитные компасы, гирополукомпасы и т.д.;
3) узлы передачи и обработки данных - микроконтроллеры и ЭВМ, схемы сопряжения,
4) внешние накопители - магнитные, оптические, электронные и т.д.
уже известны и широко используются в различных отраслях науки и техники.
Литература.
1. Ройзнер А.Г. Автоматизированная система измерения регистрации и расшифровки параметров движения поезда и обучения машинистов. Дисс. канд. тех. наук. - Москва, 1992 г.
2. Савушкин А.К. Исследование и автоматизация процесса определения текущих координат поездов в системах автоматического регулирования движения на железнодорожном транспорте. Дисс. канд. тех. наук. - Москва, 1965 г.
3. Пельпор Д.С. Расчет и конструкция авиационных приборов. - Москва, 1954 г.
4. Яблонский А.А. Курс теоретической механики. - Москва, Высшая школа. 1984 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ ДАТЧИКА ПРОЙДЕННОЙ ДИСТАНЦИИ | 2003 |
|
RU2243505C1 |
| СПОСОБ ПРОВЕДЕНИЯ РЕМОНТОВ И РЕКОНСТРУКЦИИ ЖЕЛЕЗНОДОРОЖНОЙ ИНФРАСТРУКТУРЫ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ МОДЕЛИ ПУТИ | 2011 |
|
RU2465385C1 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ И ТОЧНОСТНЫХ ХАРАКТЕРИСТИК НАВИГАЦИОННОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА И КОМПЛЕКТ СРЕДСТВ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2436044C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА БАЗЕ РАДИОКАНАЛА | 2014 |
|
RU2556133C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И ДЛЯ ОПРЕДЕЛЕНИЯ ЕГО ПОЗИЦИИ НА РЕЛЬСОВОМ ПУТИ | 2013 |
|
RU2538498C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2010 |
|
RU2446069C1 |
| Система интервального регулирования движения поездов на базе радиоканала | 2018 |
|
RU2685109C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И ОПРЕДЕЛЕНИЯ ЕГО ПОЗИЦИИ НА РЕЛЬСОВОМ ПУТИ | 2009 |
|
RU2409492C1 |
Группа изобретений относится к железнодорожной автоматике и телемеханике. Сущность способа заключается в том, что заранее определяют линейные координаты точек локальных экстремумов траектории пути, а корректируют показания бортовой аппаратуры локомотива путем распознавания этих точек экстремумов и выборки из бортовой памяти их истинных координат. Устройство для реализации способа содержит блок определения пройденного пути, блок измерения углов поворота системы координат, образуемой рельсовым транспортным средством, и устройство внешней памяти, связанные через схему сопряжения с ЭВМ. Последняя выполнена с возможностью программной обработки измерительной информации, идентификации корректирующих точек и коррекции координаты рельсового транспортного средства. Группа изобретений позволяет сократить эксплуатационные затраты для выполнения коррекции погрешностей определения местоположения рельсового транспортного средства. 2 н.п. ф-лы, 2 ил.

| САВУШКИН А.К | |||
| Исследование и автоматизация процесса определения текущих координат поездов в системах автоматического регулирования движения на железнодорожном транспорте | |||
| //Дисс | |||
| канд | |||
| техн | |||
| наук | |||
| - М., 1965, с.101-106 | |||
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОЕЗДА | 1994 |
|
RU2090420C1 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ МЕСТОПОЛОЖЕНИЯ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ПЕРСОНАЛЬНОЙ СКОРОСТНОЙ ПЕРЕВОЗКИ | 1996 |
|
RU2137643C1 |
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 1997 |
|
RU2139215C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2000 |
|
RU2172524C1 |

