Изобретение относится к области исследования геофизических параметров скважин, например измерения траекторий нефтяных, газовых, геотермальных, железорудных и других скважин.
Известны устройства [1] гироскопического типа, в которых гироскопы измеряют составляющие проекции угловой скорости Земли, а акселерометры - проекции ускорения силы тяжести.
Результаты измерения обрабатываются с помощью ПЭВМ, определяется истинное значение зенитного и азимутального углов исследуемого участка скважины в функции глубины.
Наиболее близким техническим решением является устройство [2]. Устройство содержит гироскопический двухосный датчик, акселерометр, датчик углового положения подвижной части устройства, привод подвижной части устройства, блоки электронных устройств, коллектор, корпус устройства.
Суть способа этого устройства заключается в том, что сначала разгоняют гироскоп, включают систему электрического арретирования, устанавливают подвижную часть устройства в исходное положение, отключают систему электрического арретирования и снимают показания с датчиков углов гироскопа и акселерометра, причем измерения проводятся в ориентациях гироскопа и акселерометра на апсидальных углах 0, 45, 90, 135, 180, 225, 270 и 315o, выделяют систематическую составляющую погрешности гироскопа, находят положение апсидальной плоскости, устанавливают одну из осей гироскопа и ось чувствительности акселерометра в эту плоскость, определяют зенитный и промежуточный азимутальный угол.
Затем по алгоритму Аист=2 arctg t1,2 вычисляют истинный азимут, где
Причем А - проекция азимутального угла на торцевую плоскость гироскопа; Q - зенитный угол; λ - широта места испытаний.
Наличие двух решений и квадратных значений входящих аргументов свидетельствует о нелинейной функции, график которой представлен на фиг.1.
Из графика фиг. 1 видно, что в нелинейной зоне "m" при незначительных изменениях А значение Аист может изменяться от 45o до 80o (для Q=35o).
Таким образом, основным недостатком устройства и способа для его осуществления [2] является недопустимо большая погрешность в существенно нелинейных зонах выходной характеристики азимутального датчика. Причем, чем выше широта места испытаний, тем больше погрешность измерения.
Наличие двух решений свидетельствует о двух полученных значениях азимута для одного положения инклинометра, что существенно ограничивает и затрудняет практическое применение способа и устройства для его реализации.
Другим недостатком устройства является слабая защита от возможных виброударов чувствительных элементов инклинометра. Натурные испытания показывают, что вероятность виброударов очень высока, что приводит не только к ухудшению точностных параметров, но и к нарушению работоспособности инклинометра.
Технический результат изобретения заключается в том, чтобы существенно улучшить эксплуатационные возможности гироинклинометра, т.е. повысить точность измеряемых параметров и виброударостойкость прибора.
Указанный результат достигается следующим образом.
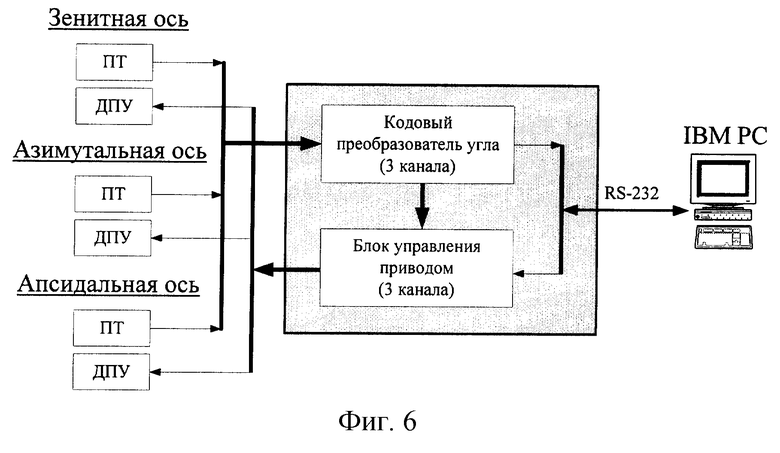
1. Механическая часть инклинометра, содержащая чувствительные элементы, устанавливается в трехосный юстировочный стенд УПИ-95 (фиг.5) и подвергается предварительной сеточной эталонировке на месте испытаний.
УПИ-95 состоит из механической части, на которой установлены измерительные датчики ПТ (поворотные трансформаторы), ДПУ (двигатели поворотного устройства - бесколлекторные двигатели постоянного тока) и блока электроники, обеспечивающего съем и преобразование сигналов с датчиков и выработку управляющих воздействий на приводы. Общая структурная схема УПИ-95 представлена на фиг.6.
Блок электроники выполнен в виде отдельного устройства, подключаемого к УПИ-95 посредством кабеля. Он выполнен в виде двух относительно независимых подсистем: кодового преобразователя угла (КПУ), обеспечивающего съем информации и формирующего цифровой код, соответствующий текущему угловому положению установки и системы управления приводом, обеспечивающего приведение установки в заданную угловую ориентацию.
Блок электроники посредством интерфейса RS-232 подключается к PC-совместимому компьютеру.
Общий алгоритм работы установки следующий:
- управляющая программа, работающая на IBM PC, задает блоку электроники код необходимой угловой ориентации, эта информация поступает в систему управления приводом в качестве уставки;
- одновременно на систему управления приводом поступает код текущей угловой ориентации УПИ-95 от КПУ, по разнице между уставкой и текущим положением вырабатывается управляющее воздействие таким образом, чтобы уменьшить эту разницу, при этом установка приводится в требуемое угловое положение.
Алгоритм юстировки измерительного прибора работает следующим образом:
- в компьютер с определенной периодичностью поступают данные о текущем угловом положении установки в качестве эталонной величины;
- поверяемый прибор, жестко закрепленный на установке, также передает в компьютер свое текущее угловое положение, измеренное с помощью инерциальных датчиков, которое сравнивается с эталонной величиной, поступающей с УПИ-95;
- разница между эталонной и поверяемой величиной записывается в таблицу корректировки, по результатам измерений в различных угловых положениях формируется полная таблица корректировки, которая включается в паспорт поверяемого прибора.
Режим юстировки проходит автоматически, т.е. оператор заранее формирует таблицу определенных установочных сочетаний углов азимута, зенита и положения подвижной части инклинометра относительно его корпуса (апсидальный угол), на которых должна быть проведена поверка прибора, а затем система приведения УПИ-95 согласно программе отработает заданные угловые положения.
Установка позволяет в заданной последовательности задавать углы азимута, зенита и положения подвижной части прибора относительно его корпуса. Результаты заносятся в ОЗУ ПЭВМ, которые затем при натурных испытаниях сравниваются с полученными значениями. Вычисляются истинные значения азимутальных и зенитных углов положения исследуемого участка траектории скважины.
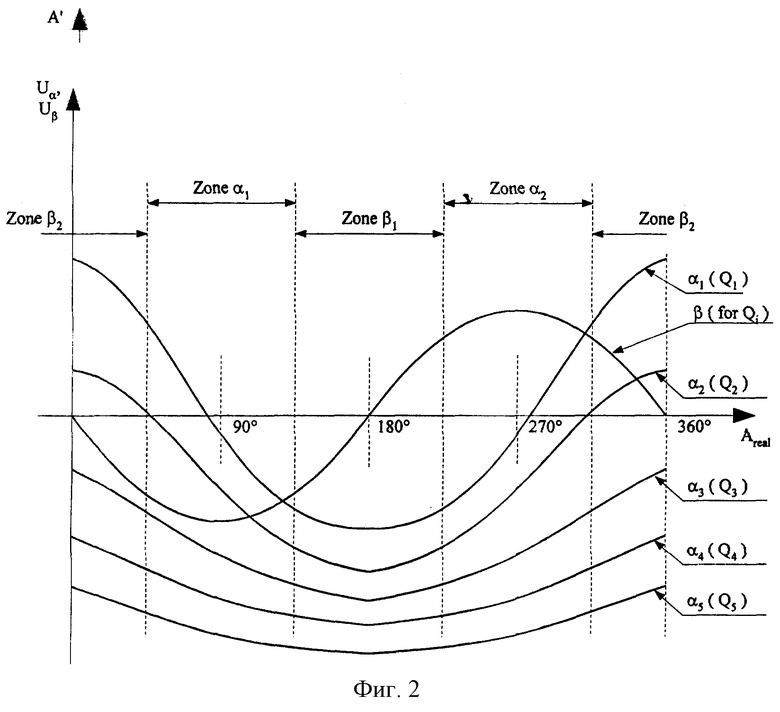
Характеристики сигналов с измерительных осей азимутального датчика α и β имеют вид, показанный на фиг.2.
Ось β азимутального датчика всегда устанавливается в горизонтальную плоскость и поэтому не зависит от зенитного угла (Qi). Следовательно, характеристика будет иметь один и тот же вид при различных зенитных углах установки инклинометра.
Напротив, характеристика сигнала с канала α азимутального датчика зависит от угла наклона оси α к плоскости горизонта. Из фиг.2 видно, что при Q1<Q2<Q3<Q4 характеристика α опускается вниз и имеет тенденцию к выпрямлению (cм.Q≈85o).
Характеристики Uα и Uβ состоят из условно линейных и нелинейных частей. С целью повышения точности измерений выделяются линейные зоны Uα или Uβ.
Нелинейная часть характеристик используется для определения однозначности решаемой задачи.
Таким образом, все измерительное поле разбивается на зоны α1, α2, β1, β2.
2. Исключение из алгоритма задачи необходимости решать квадратное уравнение позволяет однозначно определять истинный азимут в каждой исследуемой точке скважины.
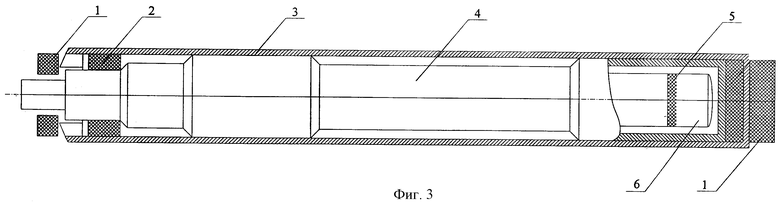
3. Инклинометр снабжается системой тройной защиты от виброударных перегрузок.
Во-первых, азимутальный датчик (например, динамически настраиваемый гироскоп) устанавливается на базовую площадку через амортизирующий виброударный клей.
Во-вторых, инклинометр помещается в защитную трубу таким образом, что по продольной оси инклинометра в головной части и в хвостовой части устанавливаются амортизаторы из пористой резины.
В-третьих, защитная труба по продольной оси снабжена внешними амортизаторами из пористой резины.
Схема устройства с системой тройной виброударной защиты показана на фиг. 3, где 1 - наружный амортизатор, 2 - внутренний амортизатор, 3 - защитный кожух, 4 - гироинклинометр, 5 - защитный виброударный клей, 6 - блок датчиков, 7 - геофизический каротажный кабель.
В результате принятых мер виброударостойкость прибора повысилась с 10 до 30 g.
Инклинометрический измерительный комплекс состоит из трехосного юстировочного стенда и гироскопического инклинометра.
Трехосный юстировочный стенд состоит из
- трехосного карданного подвеса,
- трех датчиков углового положения по каждой из осей подвеса,
- трех двигателей по каждой из осей подвеса,
- усилителей-преобразователей (см. фиг.6)
Гироскопический инклинометр состоит из:
- из двухстепенного азимутального датчика, оси чувствительности α и β которого взаимно ортогональны и располагаются в плоскости, перпендикулярной продольной оси скважинного прибора;
- акселерометра, ось чувствительности которого совпадает с направлением оси α гироскопа;
- из датчиков углового положения и двигателя поворотной части платформы, соосных с продольной осью скважинного прибора;
- блоков электронных устройств;
- трехступенчатой системой виброударной защиты и защитной трубы.
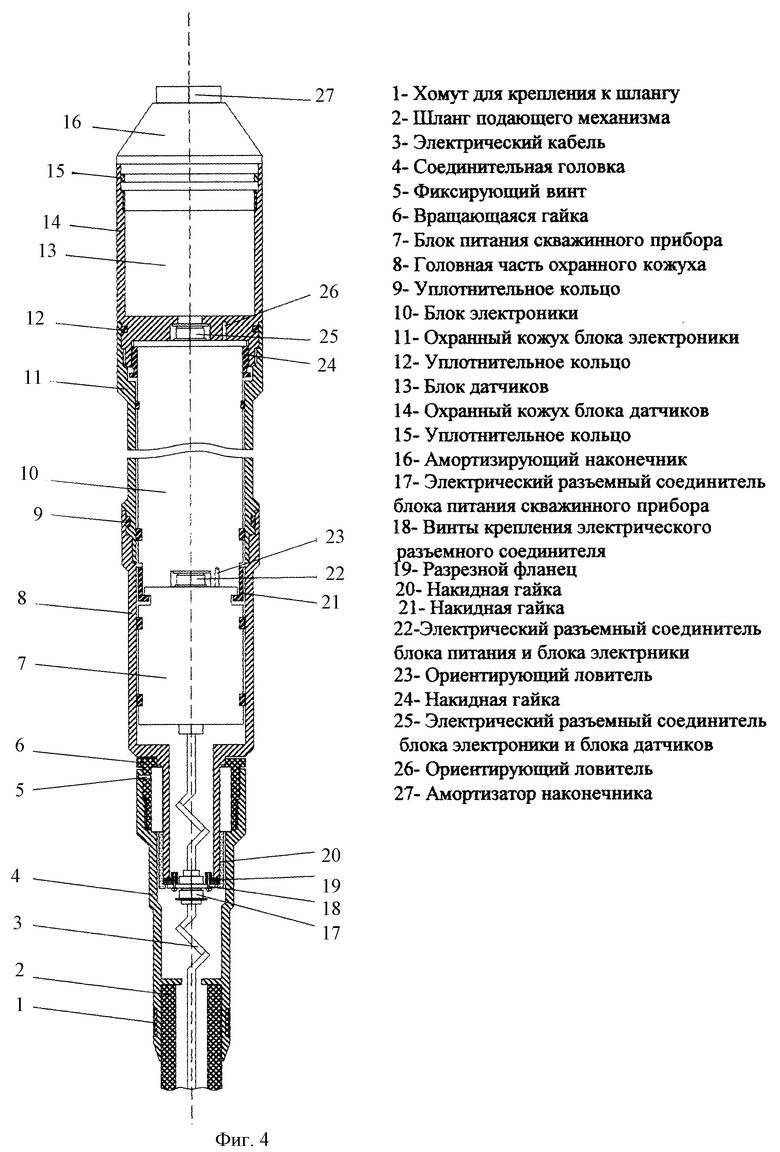
Конструктивное исполнение прибора показано на фиг.4, 5.
Сущность изобретения состоит в комплексном решении вопроса при определении траекторных параметров скважин, которое заключается в том, что
повышается точность измерения угловой ориентации скважин, так как измерение проекций угловой скорости вращения Земли проводят одним трехстепенным гироскопом в ортогональных направлениях, перпендикулярных продольной оси инклинометра, а отклонение от вертикали места измеряется одним акселерометром, ось чувствительности которого устанавливают в апсидальную плоскость;
положение апсидальной плоскости находят путем последовательных поворотов подвижной части прибора с шагом 45o, измеряя в каждом положении сигналы с осей α и β гироскопа и сигнал с датчика угла акселерометра, по результатам измерения выделяют систематическую погрешность гироскопа и акселерометра и определяют положение апсидальной плоскости;
- устанавливают ось чувствительности α гироскопа в эту плоскость, измеряют проекцию угловой скорости Земли и ускорение силы тяжести, а вычисление азимута и зенитного угла производят после сравнения полученных данных и данных, полученных на этапе юстировки инклинометра, с учетом линейных и нелинейных зон азимутальной характеристики прибора и с учетом выделенной систематической погрешности блока датчиков.
Последовательность действий при эксплуатации инклинометрического комплекса следующая.
1. Проводят предварительную сеточную эталонировку комплекта в стационарных условиях на широте места испытаний на юстировочной установке УПИ-95.
2. Помещают инклинометр в защитную трубу, снабженную внутренними и внешними амортизаторами.
3. Опускают инклинометр на заданную глубину, производят включение систем инклинометра и измеряют сигналы с измерительных осей чувствительных элементов.
4. Результаты измерения сравнивают с данными, полученными при юстировке, и определяют истинные значения азимутального и зенитного направлений исследуемого участка скважины.
Существенная новизна инклинометрического комплекса скважинной аппаратуры состоит в следующем:
- прибор проходит сеточную предварительную юстировку в стационарных условиях;
- измерения проводятся блоком датчиков, состоящим из одного гироскопа и одного акселерометра;
- контрольное измерение проводится при установке одной из осей чувствительности гироскопа (α) в апсидальную плоскость;
- в режиме контрольного измерения и вычисления истинного значения азимута и зенитного угла используются только линейные зоны α или β азимутальной характеристики инклинометра.
Полезность устройства состоит в следующем:
- повышается точность измерения во всем диапазоне измерений, так как устраняются погрешности из-за нелинейности азимутальных характеристик;
- автокомпенсируются систематические составляющие погрешностей гироскопа и акселерометра в каждом запуске;
- улучшаются эксплуатационные характеристики прибора благодаря введению трехступенчатой системы виброударной защиты блока датчиков прибора;
- благодаря мобильному портативному юстировочному стенду появляется возможность проводить и уточнять юстировку непосредственно на месте испытаний.
Литература
1. Исаченко В. Х. Инклинометрия скважин. -М.: Недра, 1987г., стр.36, 78-83.
2. RU 2104490 C1, 10.02.1998.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 2005 |
|
RU2282717C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА УГЛОВЫХ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ БУРОВОГО ИНСТРУМЕНТА | 2015 |
|
RU2610957C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН ГИРОСКОПИЧЕСКИМ ИНКЛИНОМЕТРОМ | 2008 |
|
RU2387828C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СКВАЖИННОГО ПРИБОРА В БУРОВОЙ СКВАЖИНЕ | 2011 |
|
RU2482270C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА ПЛОСКОСТИ НАКЛОНЕНИЯ СКВАЖИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2165524C2 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1996 |
|
RU2104490C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 2012 |
|
RU2507392C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ | 2003 |
|
RU2250993C1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
Комплекс предназначен для измерения и исследования траекторий нефтяных, газовых, геотермальных, железорудных и других скважин. Измеряют проекции составляющих угловой скорости вращения Земли на две оси чувствительности азимутального датчика и проекцию ускорения силы тяжести на ось чувствительности акселерометра. Предварительно проводят юстировку инклинометра в стационарных условиях на широте места испытаний. Данные заносят в память компьютера. При проведении натурных испытаний полученные значения сравниваются с данными, занесенными в память компьютера, после чего вычисляются истинные значения азимутального и зенитного углов в каждой измерительной точке скважины в функции глубины. Точность измерения повышается за счет того, что при вычислении истинных азимутальных углов принимаются во внимание только линейные части выходных характеристик азимутального датчика, а нелинейные участки используются только для определения однозначности полученных результатов. 2 с.п.ф-лы, 6 ил.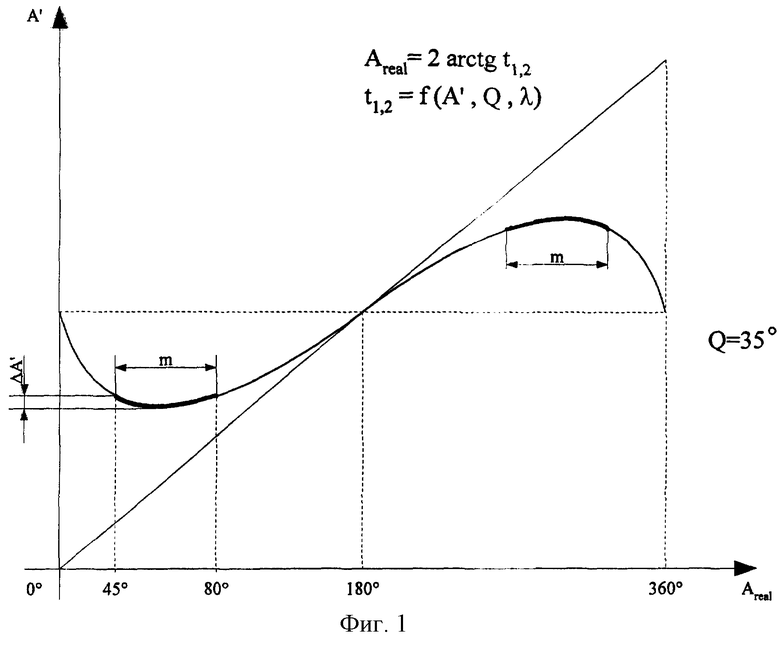
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1996 |
|
RU2104490C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1995 |
|
RU2095563C1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК ИНКЛИНОМЕТРА | 1995 |
|
RU2126525C1 |
| ИСАЧЕНКО В.Х | |||
| Инклинометрия скважин | |||
| - М.: Недра, 1987, с.78-83, 179-182, 185-188 | |||
| US 4245498, 20.01.1981 | |||
| Машина для формования железобетонных тонкостенных пространственных криволинейных покрытий сводов двойной кривизны | 1957 |
|
SU109830A1 |

