Предполагаемое изобретение относится к навигации, а более конкретно к измерителям высоты полета, направлено на решение проблемы скрытности ракет класса "воздух-поверхность" и может быть использовано при проектировании систем управления ракет и радиовысотомеров.
Известен радиотехнический способ измерения относительной высоты полета Н летательного аппарата (ЛА) [1], стр. 10-17, заключающийся в том, что на ЛА устанавливают радиовысотомер (РВ), измеряют время t прохождения радиоволн от самолета до земли и обратно, вычисляют высоту полета  где с - скорость света. В качестве РВ используются РВ с частотной [2] или импульсной [3] модуляцией излучаемого сигнала.
где с - скорость света. В качестве РВ используются РВ с частотной [2] или импульсной [3] модуляцией излучаемого сигнала.
Недостатком этого способа измерения высоты полета ЛА является большая дальность дОРТР обнаружения ЛА средствами радиотехнической разведки по излучению РВ, которая может быть определена [4], стр. 330, как
где PИ - средняя излучаемая мощность;
λ - длина волны РВ;
GPB, n - коэффициент усиления и уровень бокового излучения передающей антенны РВ соответственно;
GPTP, РПР - коэффициент усиления антенны и минимально принимаемая мощность приемника станции радиотехнической разведки (РТР) соответственно.
Если, например, [2] РИ=0,1 Вт, λ =0,07 м, GРВ=20, n=0,01, a GРТР=200, РПР=10-12 Вт, то ДОРТР=35,4 км.
Это значение ДОРТР значительно превосходит дальность ДРЛС обнаружения ракеты радиолокационной станцией (РЛС), определяемую согласно [5], стр. 14, как
где РРЛС, λ , G, PПРРЛС - соответственно излучаемая мощность, длина волны, коэффициент усиления антенны и минимально принимаемая мощность приемника РЛС;
S - эффективная площадь рассеяния ракеты.
Если, например, РРЛС=25000 Вт, λ =0,25 м, G=1000, S=0,01 м2 и РПРРЛС=10-12 Вт, то ДРЛС=9,4 км, т.е. дальность обнаружения ракеты РЛС значительно меньше дальности обнаружения ракеты станцией РТР сигналов, излучаемых РВ.
Целью предполагаемого изобретения является уменьшение дальности обнаружения ракеты станцией РТР по излучению РВ.
Поставленная цель достигается тем, что перед взлетом самолет-носитель ракеты класса “воздух-поверхность”, оборудованный навигационной аппаратурой потребителя (НАП), устанавливают в точку, координаты которой известны с высокой точностью, принимают НАП самолета навигационные радиосигналы спутниковых радионавигационных систем (СРНС) ГЛОНАСС или GPS, или обеих систем, вычисляют по ним координаты НАП самолета, зная истинные координаты, вычисляют и запоминают дифференциальные поправки (ДП) Δ х, Δ у, Δ Н и вводят их в НАП ракеты перед ее стартом, в процессе полета НАП ракеты определяют с учетом ДП плановые координаты и абсолютную высоту На, вводят плановые координаты ракеты, полученные в ее полете, в цифровую карту местности (ЦКМ), определяют по ней высоту Нк рельефа местности, над которой летит в данный момент ракета, и вычисляют относительную высоту полета Но=На-Нк.
Технический результат реализации предполагаемого способа заключается в получении достаточно точной информации об относительной высоте полета без излучения радиосигналов при полете ракеты на малых и больших высотах, и при излучении малой мощности при полете на сверхмалых высотах, что повышает скрытность и боевую эффективность ракет класса “воздух-поверхность”, система управления которых реализует предлагаемый способ получения информации об относительной высоте полета.
Как показано в [6], стр. 367, необходимая излучаемая мощность РИ, определяющая дОРТР, пропорциональна квадрату максимальной высоты Нмакс. Поэтому для уменьшения дОРТР предлагается получать информацию о малых и больших относительных высотах полета ракеты с помощью (СРНС), работающей в дифференциальном режиме [8], стр. 162-165, при получении и вводе ДП по предлагаемому способу, и ЦКМ, а сверхмалые высоты Нмин полета ракеты измерять с помощью РВ сверхмалых высот (РВСМВ), имеющего малую излучающую мощность РИ. В этом случае РИ может быть уменьшена в К раз
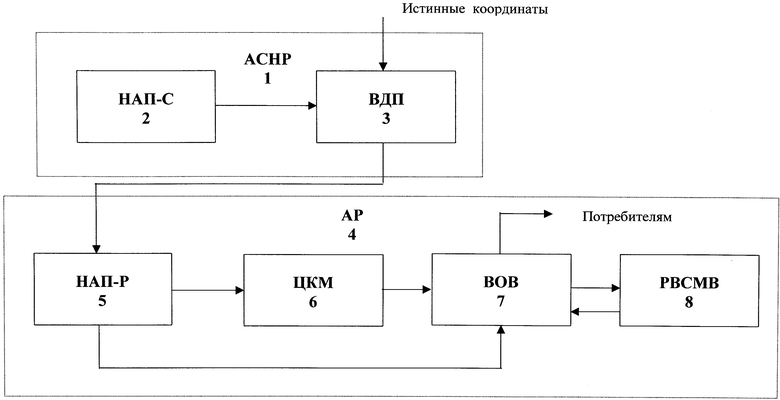
Последовательность операций предлагаемого способа поясняется функциональной схемой, приведенной на чертеже, на котором изображены:
1 - аппаратура самолета - носителя ракеты (АСНР), в состав которой входят:
2 - навигационная аппаратура потребителя НАП-С;
3 - вычислитель дифференциальных поправок (ВДП);
4 - аппаратура ракеты (АР), в состав которой входят:
5 - навигационная аппаратура потребителя (НАП-Р);
6 - цифровая карта местности (ЦКМ);
7 - вычислитель относительной высоты (ВОВ);
8 - радиовысотомер сверхмалых высот (РВСМВ).
Связи между блоками приведены на чертеже и осуществляются, например, последовательным кодом и кодом RS-232C.
Заявляемый способ характеризуется следующей последовательностью действий:
1 - перед взлетом самолета включают НАП-С 2;
2 - устанавливают самолет в месте, координаты которого известны с высокой точностью;
3 - принимают навигационные радиосигналы не менее четырех навигационных спутников Земли и определяют псевдодальности;
4 - вычисляют по псевдодальностям плановые координаты самолета;
5 - зная истинные координаты самолета, вычисляют ДП по плановым координатам Δ х, Δ у и высоте Δ Н и запоминают их;
6 - вводят ДП перед стартом ракеты в НАП-Р 5;
7 - в процессе полета ракеты с помощью НАП-Р 5 определяют с учетом ДП абсолютную высоту полета На и плановые координаты ха и уа, которые вводят в ЦКМ6;
8 - определяют высоту местности Нк, над которой летит в данный момент ракета, путем ввода информации о плановых координатах с выхода НАП-Р 5 в ЦКМ6;
9 - вычисляют относительную высоту по формуле
Но=На-Нк
и выдают информацию о ней потребителям;
10 - включают РВСМВ 8 при Н0, равной расчетной высоте безопасности полета;
11 - выдают потребителям информацию о высоте РВСМВ 8.
Дополнительная погрешность определения высоты, возникающая при реализации этого способа, незначительна и ее среднеквадратическое значение может быть определенно как
где σ ЦКМ- среднеквадратичная погрешность ЦКМ;
σ В - погрешность “возраста”.
Как показано в [7], стр. 47-48,
где σ к - погрешность первичного картографирования, σ к=(2-3) м;
σ ДП - погрешность дискретизации поля.
По графику, приведенному в [7] на стр. 48, для среднепересеченной местности σ ДП<1,5 м при шаге дискретизации Δ <250 м.
Тогда 
В [8], стр. 165, показано, что σ В=σ ФО+t· V+b· L,
где σ ФО=2,28 м;
t - время между временем tДП вычисления ДП и ее использованием;
L - расстояние между точками получения ДП и ее использования;
V и b - коэффициенты, учитывающие время и дальность полета, соответственно,
V=1,32· 10-3 м/с, b=438· 10-5 м/км.
Можно считать, что L=LС+LА,
где LС - дальность совместного полета самолета и ракеты;
LА - дальность автономного полета ракеты.
Если, например, LС=350 км, LА=150 км, а средняя скорость полета самолета и ракеты VС=300 м/с, то
t=500· 103/300=1666 с, а σ B=2,28+1,32· 10-3·1666+438· 10-5·500=6,66 м.
Таким образом, для рассмотренного случая

Столь малая ошибка позволяет уменьшить максимально измеряемую высоту РВ до величины
Нмин=Нbp=Нb+3σ Д,
где Нbp - расчетная высота безопасного полета;
Нb - допустимая высота безопасного полета.
Если Hb=20 м, то Hмин=20+22,5=42,5 м.
Полученное значение Нмин значительно меньше максимальной высоты Нмакс=2000 м, измеряемой РВЭ [2].
Столь малая высота полета позволяет в  раз снизить излучаемую мощность и в
раз снизить излучаемую мощность и в  раз уменьшить дальность обнаружения излучения РВ, т.е. дОРТР=0,75 км.
раз уменьшить дальность обнаружения излучения РВ, т.е. дОРТР=0,75 км.
Приборная реализация предлагаемого способа не приведет к значительному увеличению массы и объема бортового устройства. Основным устройством, увеличивающим массу приборов, необходимых для реализации этого способа, является НАП-Р. Но, как показано в [9], стр.6, НАП устанавливаются на вновь проектируемые и модернизируемые самолеты и ракеты. Что же касается массы ЦКМ, то она незначительна. Как показано в [7], стр. 107, дискрет плановой координаты ЦКМ целесообразно выбирать равным 125 м, а для записи одного значения поля рельефа достаточно 8 бит. Если зона пуска ракеты самолетом-носителем ограничена размерами 200х200 км, то объем ЦКМ (VЦКМ=8• 8• 200• 8• 200=2,56 Мбайт).
Такой объем памяти обеспечивает одно ПЗУ типа LH28F032 SUTD [11], имеющее объем памяти, равный 4 Мбайт.
В настоящее время навигационная аппаратура потребителей СРНС Глонасс и GPS широко применяется для определения местоположения широкого класса объектов военного и гражданского назначения, т.к. при использовании современных интегральных микросхем достигнуты малые габаритные размеры, масса и низкая стоимость НАП.
Поэтому предлагаемый способ соответствует требованию условий "Промышленная применяемость" (П.19.5.1 "Правил СП-2").
Таким образом, предлагаемый способ измерения относительной высоты полета ракет по навигационным радиосигналам космических аппаратов спутниковых радионавигационных систем и цифровой карте местности обладает новизной и дает при использовании положительный эффект, заключающийся в уменьшении дальности обнаружения излучения РВ средствами РТР.
Литература
1. Жуковский А.П. и др. Теоретические вопросы радиовысотометрии. - М: Советское радио, 1979, с.10-17.
2. Изделие РВЭ. Техническое описание ГУ1.000.076-05ТО /УПКБ “Деталь”, 1999, с.15.
3. Изделие А-035. Руководство по эксплуатации /УПКБ “Деталь”, 1985, с.21.
4. Белоцерковский Г.Б. Основы импульсной техники и радиолокации, Л.: Судостроение, 1965, с.330.
5. Сколник М. Введение в технику радиолокационных систем. - М.: Мир, 1965, с.14.
6. Финкельштейн М.И. Основы радиолокации. - М.: Радио и связь, 1983, с.357.
7. Белоглазов И.Н. Джанджгава Г.И. Основы навигации по геофизическим полям. - М.: Наука, 1985, с.47-48, 107, 162-165.
8. Глобальная спутниковая радионавигационная система ГЛОНАСС. Под ред. В.Н.Харисова, А.И.Перова, В.А.Болдина. - М.: ИПРЖР, 1998, с.162-164, 165.
9. Образцы перспективного ударного авиационного вооружения США на выставке в Фарнборо //Авиационная и ракетная техника. - 2000. - №34 (2142), с.6.
10. Ефименко B.C., Горев А.П. Исследование характеристик пространственно-временной обработки для приема сигналов спутниковой радионавигационной системы //Радиотехника. - 2001. - №7, с.46-50.
11. Sharp FLASH Memoru LH28F032SUTD: Рекл. просп. фирмы SHARP, 2002.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ БАРОМЕТРИЧЕСКОГО ВЫСОТОМЕРА С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВОЙ СИСТЕМЫ МЕСТООПРЕДЕЛЕНИЯ | 2006 |
|
RU2316785C1 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ БОРТОВОГО ПРИЕМОИНДИКАТОРА СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 2003 |
|
RU2254591C2 |
| УЧЕБНАЯ АВИАЦИОННАЯ БОМБА С СИСТЕМОЙ ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ НАВИГАЦИИ | 2006 |
|
RU2319102C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИОВЫСОТОМЕРОМ МАЛЫХ И ПРЕДЕЛЬНО МАЛЫХ ВЫСОТ | 2004 |
|
RU2262717C1 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2013 |
|
RU2517176C1 |
| САМОНАВОДЯЩАЯСЯ АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ | 2003 |
|
RU2247314C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС, ИСПОЛЬЗУЮЩИЙ ЕСТЕСТВЕННЫЕ И ИСКУССТВЕННЫЕ ПОЛЯ ЗЕМЛИ | 2014 |
|
RU2558647C1 |
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2006 |
|
RU2339905C2 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
Изобретение относится к навигации, в частности к измерителям высоты полета ракеты класса "воздух-поверхность", и может быть использовано при проектировании систем управления ракет и радиовысотомеров. Технический результат заключается в получении информации об относительной высоте полета ракеты без излучения радиосигналов при полете на малых и больших высотах и при излучении малой мощности при полете на сверхмалых высотах. Способ заключается в том, что перед взлетом самолет-носитель (СН) ракет класса "воздух-поверхность", оборудованный навигационной аппаратурой потребителя (НАП), устанавливают в точку, координаты которой известны с высокой точностью, принимают НАП радиосигналы систем ГЛОНАСС или GPS или обеих систем, вычисляют по ним координаты установки антенны НАП, зная истинные координаты СН, вычисляют дифференциальные поправки (ДП) координат СН, вводят их в НАП, которая установлена на ракете, перед ее стартом, в процессе полета ракеты НАП, которая установлена на ракете, определяют с учетом ДП плановые координаты ракеты и абсолютную высоту полета ракеты, вводят плановые координаты ракеты, полученные в ее полете, в цифровую карту местности, определяют по ним высоту местности, над которой летит в данный момент ракета, вычисляют относительную высоту полета и включают радиовысотомер при уменьшении относительной высоты полета ниже расчетной высоты безопасности полета. 1 ил.
Способ измерения относительной высоты полета ракет класса "воздух-поверхность", заключающийся в том, что относительная высота полета определяется с помощью навигационной аппаратуры потребителя спутниковой радионавигационной системы, цифровой картой местности или радиовысотомера, отличающийся тем, что перед взлетом самолет-носитель ракет класса "воздух-поверхность", оборудованный навигационной аппаратурой потребителя, устанавливают в точку, координаты которой известны с высокой точностью, принимают навигационной аппаратурой потребителя, которой оборудован самолет-носитель, навигационные радиосигналы навигационных спутников систем ГЛОНАСС или GPS или обеих систем, вычисляют по ним координаты установки антенны навигационной аппаратурой потребителя, которой оборудован самолет-носитель, зная истинные координаты самолета-носителя вычисляют дифференциальные поправки координат самолета-носителя, вводят их в навигационную аппаратуру потребителя, которая установлена на ракете, перед стартом, в процессе полета ракеты навигационной аппаратурой потребителя, которая установлена на ракете, определяют с учетом дифференциальных поправок плановые координаты ракеты и абсолютную высоту На полета ракеты, вводят плановые координаты ракеты, полученные в ее полете, в цифровую карту местности, определяют по ним высоту местности Hк, над которой летит в данный момент ракета, вычисляют относительную высоту полета Но=На-Нк и включают радиовысотомер при уменьшении относительной высоты полета ниже расчетной высоты безопасности полета.
| WO 9961933, 02.12.1999 | |||
| СПОСОБ ПРЕДСТАРТОВОЙ ВЫСТАВКИ ВЫСОКОТОЧНЫХ РАКЕТ | 1995 |
|
RU2150124C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОСЕЙ КООРДИНАТ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ОБЪЕКТА ОТНОСИТЕЛЬНО БАЗОВОЙ СИСТЕМЫ КООРДИНАТ (ЕГО ВАРИАНТЫ) | 1999 |
|
RU2160216C1 |
| US 5708440 А, 13.01.1998 | |||
| US 5572128 А, 05.11.1996. | |||

