Изобретение относится к ракетной технике и может быть использовано при топогеодезической привязке и наведении высокоточных ракет (ВТР) по сигналам космических аппаратов (КА).
Известен способ прицеливания ВТР с командно-гироскопическим прибором (КГП), заключающийся в передаче на борт ВТР ориентирного направления местности через гирокомпас, прибор управления, основу которого составляет коллиматор, многогранную призму (зеркало), установленную на КГП [1,2]. При вполне приемлемой точности (до 15 угловых секунд) выставки КГП в плоскость пуска, техническая реализация способа не удовлетворяет современным требованиям подготовки и пуска ВТР по временным показателям из-за наличия гирокомпаса, работа с которым (в основном ручные операции) связана со значительными временными затратами. Особенно эта ситуация характерна для подготовки и пуска ВТР с неподготовленной в топогеодезическом отношении стартовой позиции. Так, например, для современных ВТР данное время составляет свыше 20 минут, что в условиях высокоманевренных боевых действий, когда время пребывания подвижных объектов противника на позиции не превышает 20 - 30 минут, явно неприемлемо.
Известен также способ определения координат местоположения объекта [3] с помешаю КА, находящихся на равномерно расположенных круговых орбитах определенным образом и излучающих сигналы, принимаемые и обрабатываемые комплексом наземной аппаратуры. Орбиты выбраны так, что в любой точке земного шара в разное время наблюдаются не менее 4-х КА, которые образуют систему навигационных КА (СНКА), что позволяет одновременно производить четыре измерения и с достаточной точностью (до 10 м) по определенному алгоритму определять координаты местоположения (в рассматриваемом случае - точки пуска (ТП) ВТР. При известных координатах цели, решением обратной геодезической задачи (ОГЗ), определяется угол азимутального ориентирования ВТР, для передачи которого на борт ракеты опять же необходим гирокомпас.
Целью изобретения является расширение возможностей способа определения координат местоположения с помощью СНКА для предстартовой выставки ВТР и сокращение времени подготовки и пуска ВТР.
Сущность изобретения заключается в использовании сигналов СНКА для точного определения местоположения ВТР, ее ориентации в пространстве и азимутальном наведении на цель.
Предлагается, что в состав системы управления ВТР входит бортовая радиолокационная станция (БРЛС) с фазированной антенной решеткой (ФАР), которая в последующем может быть использована при решении задач преодоления ВТР системы противоракетной обороны, радиокоррекции (перенацеливания) ВТР на траектории полета, распознавания и идентификации цели.
СНКА обеспечивает излучение непрерывных радиосигналов СВЧ-диапазона, которые образуют равномерно-распределенное навигационное поле. В зоне радиовидимости БРЛС при полностью развернутой СHKA одновременно могут находиться до 10-ти КА. Из числа видимых КА выбирается рабочее "созвездие" КА, в которое включается оптимальное по критерию минимума погрешностей количество КА - 4.
В качестве измеряемых в БРЛС радионавигационных параметров (РНП) используется время прихода радиосигналов (PC) и допплеровский сдвиг частоты. Данным РНП соответствуют дальность между КА и ВТР, а также радиальная скорость их относительного движения. В случае несинхронизированности опорных генераторов частот КА и БРЛС измерение указанных параметров позволяет определить так называемые квазидальность и радиальную квазискорость (дальность, радиальную скорость и соответствующие неизвестные величины, обусловленные расхождением фаз или частот опорных генераторов).
Время прохода сигналов определяется по времени БРЛС и зависит от момента излучения сигнала КА относительно шкалы времени СНКА, а также взаимного сдвига времени БРЛС и СНКА и задержки распространения сигналов. Измерение времени прихода сигналов с i-го КА эквивалентно измерению квазидальности RКВi , которая может быть представлена в следующем виде:
Rквi= Roi+c•ΔtAi+c(Δtкаi-Δtп), (1)
где R оi - истинная наклонная дальность от БРЛС до i-го КА;
c - скорость распространения радиомагнитных волн;
ΔtAi - приращение задержки времени за счет влияния атмосферы (тропосферы и ионосферы);
Δtп - расхождение шкалы времени БРЛС относительно шкалы времени СНКА;
Δtкai - расхождение шкалы времени i-го КА относительно шкалы времени СНКА.
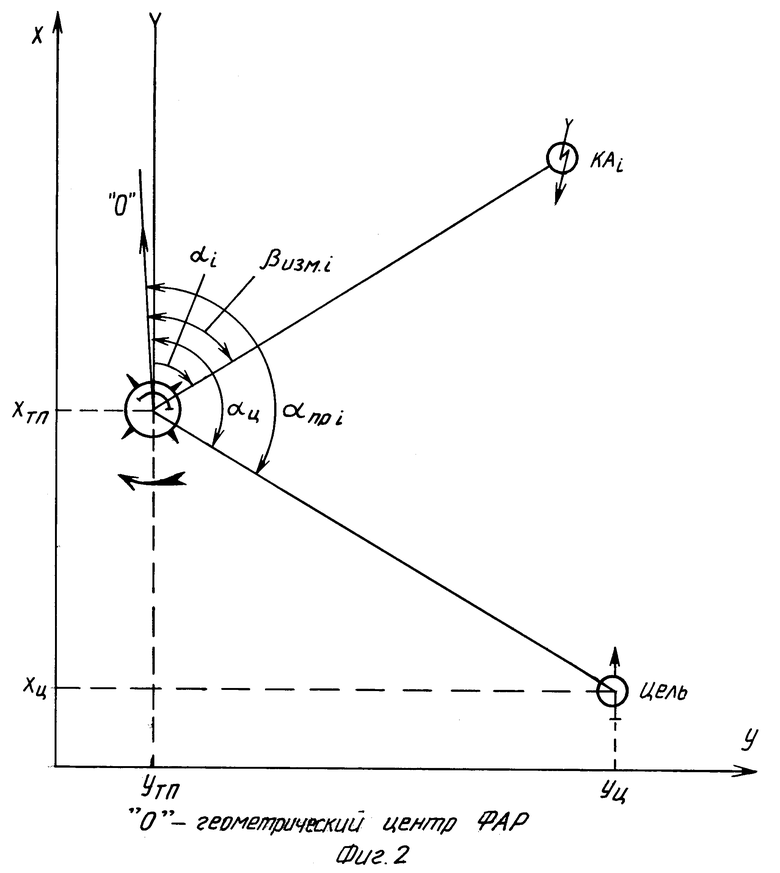
Истинная наклонная дальность от БРЛС до i-го КА определяется их взаимным расположением в пространстве:
где X каi , Yкаi , Z каi - координаты i-го КА в геоцентрической прямоугольной системе координат (см. фиг. 1);
Xп, Yп, Zп - координаты БРЛС в той же системе отсчета.
Координаты X каi , Yкаi, Zкаi расхождение шкалы времени i-го КА относительно шкалы времени СНКА ( Δtкаi ) и приращение задержки времени за счет влияния атмосферы ΔtAi передаются с борта КА.
Из выражений (1) и (2) следует, что измеренное значение квазидальности (R КВi ) является функцией четырех неизвестных - Xп, Yп, Zп и Δtп .
Измерения квазидальности по сигналам 4-х КА позволяют составить систему из четырех уравнений вида (1) относительно указанных четырех неизвестных и решить навигационно-временную задачу, в результате которой рассчитываются координаты БРЛС. Решив ОГЗ, по определенным координатам ТП и известным координатам цели можно вычислить дирекционный угол цели αц (см. фиг. 2).
При обработке РС каждого КА БРЛС автоматически отслеживает угловое положение работающих излучателей ФАР относительно КА, ориентируясь таким образом в пространстве.
Дирекционный угол КА αi , представляющий собой горизонтальный угол между геометрической осью группы работающих излучателей и направлением на север, определяется решением ОГЗ по известным координатам точки пуска и КА.
В соответствии с фиг. 2 угол прицеливания aпр, представляющий горизонтальный угол между геометрическим центром ФАР и направлением на цель, определяется из выражения:
αпрi= αц+βизмi-αi, (3)
где αц - дирекционный угол цели;
βизмi - горизонтальный угол между осью работающих излучателей и геометрическим центром ФАР;
αi - дирекционный угол КА, от которого производится прием радионавигационных параметров.
Повышение точности определения угла прицеливания aпр достигается статистической обработкой результатов измерений по всему "созвездию" КА, после чего осуществляется разворот ВТР в плоскость пуска с последующим стартом.
Предлагаемый способ предстартовой выставки ВТР позволяет:
осуществлять топогеодезическую привязку, что позволяет отказаться от системы топопривязки и навигации, размещенной в пусковой установке;
проводить прицеливание ВТР по азимуту принципиально в пределах от 0o до 360o, что в свою очередь дает возможность не задавать ПУ определенного положения относительно цели (основного направления пуска) и не требует использования гирокомпаса;
полностью или в большей степени автоматизировать предстартовые операции с ВТР и ее пуск;
с использованием современной элементной базы сравнительно легко реализовать его технически;
сократить время подготовки ВТР к пуску (экспресс-оценка временных затрат показывает, что оно может быть равно 5 минутам, соответствуя современным требованиям ведения высокоманевренных боевых действий).
Список использованных источников
1. Липтон А. Выставка инерциальных систем на подвижном основании. Пер. с англ. - М.: Наука, 1971. - 130 с.
2. Фролов B.C. Инерциальное управление ракетами. - М.: Воениздат, 1975. - 240 с.
3. Сетевые спутниковые радионавигационные системы / Под ред. В.С.Шебшаевича. - М.: Радио и связь, 1993. - 408 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2001 |
|
RU2181927C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПОСЛЕ ПУСКА УПРАВЛЯЕМОЙ РАКЕТЫ | 2004 |
|
RU2269452C2 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ ГЕОДЕЗИЧЕСКИХ ДАННЫХ С ПОМОЩЬЮ УНИВЕРСАЛЬНОГО ТОПОПРИВЯЗЧИКА (УТП) | 2010 |
|
RU2440558C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| Способ определения координат и углов положения осей подвижных объектов с помощью атомных часов, установленных на объектах и в пунктах наблюдения | 2017 |
|
RU2678371C2 |
| УСТРОЙСТВО ДЛЯ РАДИОНАВИГАЦИОННОГО ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖУЩЕГОСЯ ОБЪЕКТА В УСЛОВИЯХ ДЕЙСТВИЯ НЕБЛАГОПРИЯТНОГО ГЕОМЕТРИЧЕСКОГО ФАКТОРА | 2001 |
|
RU2207584C2 |
| УСТРОЙСТВО ДЛЯ РАДИОНАВИГАЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ И СКОРОСТИ ДВИЖУЩЕГОСЯ ОБЪЕКТА В УСЛОВИЯХ ДЕЙСТВИЯ НЕБЛАГОПРИЯТНОГО ГЕОМЕТРИЧЕСКОГО ФАКТОРА | 2003 |
|
RU2265864C2 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СПОСОБ ЗАДАНИЯ МАРШРУТА ДВИЖЕНИЯ ПЛАНИРУЮЩЕГО ЛЕТАТЕЛЬНОГО АППАРАТА С ТЕРМИНАЛЬНЫМ УПРАВЛЕНИЕМ | 2003 |
|
RU2251664C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ МОБИЛЬНОГО КОМПЛЕКСА НАВИГАЦИИ И ТОПОПРИВЯЗКИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2010 |
|
RU2436042C1 |
Изобретение относится к ракетной технике и может быть использовано при топогеофизической привязке и наведении высокоточных ракет по сигналам космических аппаратов. Техническим результатом является расширение возможностей определения координат местоположения для предстартовой выставки высокоточных ракет и сокращение времени подготовки и пуска высокоточных ракет. Технический результат достигается за счет того, что после определения координат точки пуска ракеты путем обработки информации, получаемой по радионавигационным каналам системы навигационных космических аппаратов, и решения навигационно-временной задачи производят угловую ориентацию ракеты в пространстве путем расчета угла прицеливания и его составляющих. 2 ил.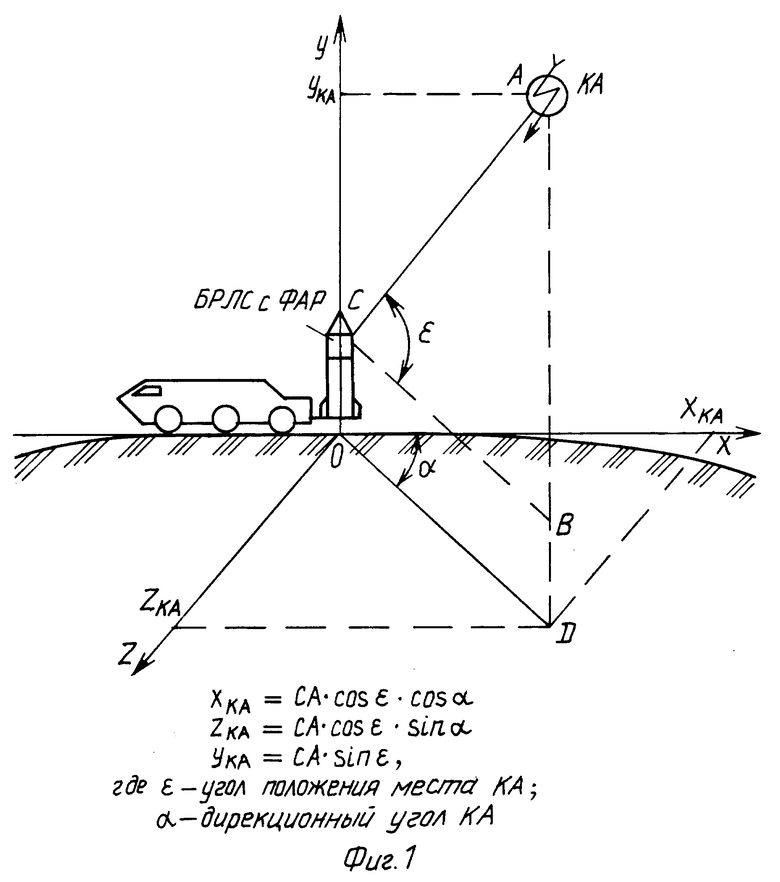
Способ предстартовой выставки высокоточных ракет (ВТР), заключающийся в определении координат точки пуска ракет путем обработки информации, получаемой по радионавигационным каналам системы навигационных космических аппаратов (СНКА), и решения навигационно-временной задачи
Rквi= Roi+c•Δtpi+c(Δtn-Δtkai),
где Rквi - квазидальность;
Roi - истинная наклонная дальность от бортовой радиолокационной станции (БРЛС) с фазированной антенной решеткой (ФАР) до i-го КА;
с - скорость распространения радиомагнитных волн;
Δtpi - приращение задержки времени за счет влияния атмосферы (тропосферы и ионосферы);
Δtn - расхождение шкалы времени БРЛС относительно шкалы времени СНКА;
Δtкai - расхождение шкалы времени i-го КА относительно шкалы времени СНКА;
где Xкаi, Yкаi, Zкаi - координаты i-го в КА в прямоугольной системе координат;
Xn, Yn, Zn - координаты БРЛС в той же системе отсчета,
отличающийся тем, что при помощи БРЛС с ФАР производят угловую ориентацию ракеты в пространстве путем расчета угла прицеливания (αпрi) и его составляющих
αпрi= αц+βизмi-αi,
где αц - дирекционный угол цели, определяемый решением обратной геодезической задачи (ОГЗ) по известным координатам точки пуска и цели;
βизмi - горизонтальный угол между осью работающих излучателей и геометрическим центром ФАР;
αi - дирекционный угол КА, от которого производится прием радионавигационных параметров и определяемый решением ОГЗ по известным координатам точки пуска и КА.
| Сетевые спутниковые радионавигационные системы /Под ред | |||
| Шебшаевича В.С | |||
| - М.: Радио и связь, 1993, c.408 | |||
| US 3702477 A, 07.11.72 | |||
| ТОПЛИВНЫЙ НАСОС ВЫСОКОГО ДАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2014 |
|
RU2578058C1 |
| Фролов В.С | |||
| Инерционное управление ракетами | |||
| - М.; Воениздат, 1975, c.240 | |||
| Липтон А | |||
| Выставка инерциальных систем на подвижном основании | |||
| - М.: Наука, 1971, c.130. | |||
