Предлагаемое изобретение относится к радиолокационной технике и может быть использовано для измерения малых и сверхмалых высот полета летательного аппарата (ЛА).
Известны [1] радиовысотомеры (РВ), предназначенные для измерения малых высот. В этих РВ реализован способ измерения высоты полета ЛА, включающий излучение передающей антенной зондирующего сигнала передатчика. Прием приемной антенной отраженного от поверхности Земли сигнала, его усиление и преобразование приемником измерение времени распространения радиоволн от ЛА до земной поверхности передающей антенн, разнесенных на ЛА между собой на достаточное расстояние R, позволяет существенно уменьшить уровень зондирующего сигнала на выходе приемной антенны, возникающего за счет конечной развязки между передающей и приемной антеннами и нарушающего работу РВ.
Однако вследствие работы на две разнесенные антенны РВ измеряет наклонную дальность

где Н - высота полета.
Следовательно, РВ измеряет высоту Н с методической ошибкой

Согласно [2], с.15, антенны должны быть разнесены на расстояние R≥1,5 м.
При этом значении R методическая ошибка ΔНм изменяется от ΔНм5=0,05 м при полете на высоте Н=5 м до ΔНм1=0,25 м при полете на высоте Н=1 м.
Между тем для посадки ряда самолетов необходимо измерение высоты полета с погрешностью, не превышающей 0,1 м [3].
Целью предлагаемого изобретения является повышение точности измерения высоты при полете ЛА на малых и предельно малых высотах.
Поставленная цель достигается тем, что в способе измерения радиовысотомером высоты полета летательного аппарата, включающем излучение передающей антенной зондирующего сигнала передатчика, прием приемной антенной отраженного от поверхности Земли сигнала, его усиление и преобразование приемником, измерение времени распространения радиоволн от летательного аппарата до земной поверхности и обратно и преобразование его в двоичный код высоты Нn, осуществляют вычитание из кода высоты Нn кода методической ошибки измерения высоты, для чего, зная расстояние R между приемной и передающей антеннами РВ, установленными на летательном аппарате, вычисляют методические ошибки ΔНмi в зависимости от высоты полета Нi, вводят в состав радиовысотомера вычитающее устройство и постоянное запоминающее устройство, в которое записывают в процессе изготовления РВ вычисленные для фиксированных высот значения методических ошибок, в процессе полета ЛА общепринятыми методами измеряют высоту полета Hni, измеренное значение Hni высоты полета вводят в вычитающее устройство и в постоянное запоминающее устройство, извлекают из него методическую погрешность ΔНмi, корректируют в вычитающем устройстве на ее величину Hni, полученное значение Hi=Hni-ΔНмi преобразуют в код и выдают его потребителю информации о высоте.
Сравнение заявляемого способа с прототипом показывает наличие следующих действий:
- исходя из известного расстояния R между приемной и передающей антеннами вычисляют по формулам (1) и (2) ожидаемые методические ошибки ΔНмi для различных значений высот Hi, например для H1=0,5 м, Н2=1 м, Н3=2 м, Н4=4 м, Н5=5 м;
- вводят в состав РВ постоянное запоминающее устройство (ПЗУ) и вычитающее устройство (ВУ);
- вводят при изготовлении РВ значения методической ошибки в память ПЗУ, подавая на его адресные входы значения высот Hi, для которых вычислялись ΔНмi;
- включают РВ и измеряют высоту Нni измерителем высоты, который выдает информацию о высоте в виде параллельного кода, поступающего на первые входы ПЗУ и ВУ;
- извлекают из ПЗУ значение методической ошибки ΔНмi, соответствующее измеренной высоте Hni;
- вычитают в ВУ ΔНмi из Hni и полученный код
Нист=Hni-ΔНмi
используют для формирования кода высоты.
Введение подобных действий для повышения точности измерения высоты полета ЛА из общедоступных источников неизвестно, что позволяет сделать вывод о соответствии предлагаемого способа критерию «Новизна».
Вновь вводимые блоки, необходимые для разработки радиовысотомера, в котором может быть использован предлагаемый способ, широко применяются в радиотехнике и описаны в [4], с.125-126 - постоянные запоминающие устройства, с.331-338 - вычитающие устройства, а линия задержки - в [5].
При введении новых блоков в указанных связях с остальными блоками радиовысотомер проявляет новые свойства, позволяющие повысить точность измерения малых и сверхмалых высот полета ЛА, что не следует из уровня техники и соответствует критерию «Изобретательский уровень».
Сущность предлагаемого способа повышения точности измерения малых и предельно малых высот полета ЛА поясняется чертежом, на котором представлены:
1 - приемопередатчик (ПП);
2 - антенна передающая (АПРД);
3 - антенна приемная (АПРМ);
4 - блок измерения высоты (БИВ);
5 - постоянное запоминающее устройство (ПЗУ);
6 - линия задержки с отводом (ЛЗ);
7 - вычитающее устройство (ВУ);
8 - преобразователь код-код (ПКК).
Приемопередатчик 1 предназначен для генерации зондирующих сигналов, их усиления и преобразования.
Антенна передающая 2 служит для излучения зондирующих сигналов, а антенна приемная 3 - для приема отраженных от земной поверхности сигналов.
Блок измерения высоты 4 предназначен для создания сигналов, управляющих работой приемопередатчика 1, обработки принятых сигналов, формирования параллельного кода, несущего информацию о высоте Нn, и сигнала разрешения снятия информации о высоте.
Постоянное запоминающее устройство 5 предназначено для хранения данных о величине методической ошибки, зависящей от расстояния между антеннами и высоты полета ЛА, и выдачи информации о ней.
Линия задержки 6 предназначена для задержки обработки сигналов, поступающих на входы ПЗУ 5 и ВУ 7, необходимой для компенсации времени задержки выходных сигналов этих блоков относительно входных сигналов.
Вычитающее устройство 7 предназначено для вычитания из кода измеряемой высоты Hni кода методической ошибки, соответствующей измеренной высоте Hni и заложенной в ПЗУ 5, и формирования кода истинной высоты Нист=Hni-ΔНмi.
Преобразователь код-код 8 предназначен для преобразования параллельного кода высоты Нист в код, принятый в системе управления ЛА, на котором установлен РВ.
В качестве ПП 1, АПРД 2, АПРМ 3, БИВ 4 могут быть использованы соответствующие блоки выпускаемых РВ как с частотной, так и импульсной модуляцией зондирующего сигнала. В качестве ПЗУ 5 может быть использована, например, микросхема 556РТ7, в качестве ВУ 7 - микросхема 564ИМ-1, в качестве линии задержки 6 - теплостойкая линия задержки ЛЗТ [5], а в качестве ПКК-8 - микросборка ВА996А, предназначенная для преобразования параллельного кода в код по ГОСТ 26765.52-87, [6], с.76.
Связи между указанными блоками соответствуют приведенным на чертеже.
В приведенной функциональной схеме предлагаемый способ реализуется следующим образом.
Блок измерения высоты 4 формирует сигналы, под действием которых приемопередатчик 1 генерирует СВЧ-колебания с импульсной частотой или фазовой модуляцией зондирующего сигнала.
Эти сигналы излучаются передающей антенной 2, отражаются земной поверхностью, принимаются приемной антенной и поступают на вход приемопередатчика 1, который проводит их обработку и выдает информацию о высоте Hni в виде параллельного кода, которая с его первого выхода поступает на первые входы ПЗУ 5 и ВУ 7. Одновременно БИВ 4 формирует на втором выходе импульс «а», разрешающий съем информации и поступающий на вход ЛЗ 6. Снимаемый с первого выхода ЛЗ 6 импульс «б» поступает на 2-й вход ПЗУ 5 и извлекает из него код методической ошибки ΔНмi, поступающий на второй вход ВУ 7, которое при поступлении импульса «в» со 2-го выхода ЛЗ 6 вычитает из кода Нni код ΔНмi.
Оценим эффективность предлагаемого способа измерения малых и сверхмалых высот.
В таблице представлены результаты расчетов измеряемой дальности L, вводимой в ПЗУ расчетной ошибки ΔНм и методической ошибки измерения высоты ΔН в зависимости от высоты полета при расстоянии R между антеннами R=1,5 м.
При этом значение ΔНм вводится с дискретностью δ=0,01562 м.
Как следует из этой таблицы, при условии измерения наклонной дальности L без погрешности величина методической ошибки не превышает 0,008 м, т.е. половины цены младшего разряда кода.
Если же наклонная дальность измеряется с погрешностью, то степень компенсации методической ошибки уменьшается. Пусть, например, истинная наклонная дальность L=1,3 м, соответствующая высоте полета Н=1,0625 м, измеряется с погрешностью ΔL=± 0,051 м.
Тогда при измеренной дальности с положительным значением погрешности L1=1,351 м из ПЗУ извлекается ΔНм1=0,218 м, и РВ выдаст код высоты H1=L1-ΔНм1=1,351-0,218=1,133 м, т.е. высота будет определена с погрешностью ΔН1=1,133-1,0625=0,07 м.
Если же знак погрешности измерения высоты наклонной дальности отрицательный, то РВ измерит L2=1,25 м, из ПЗУ 5 будет извлечен код методической ошибки ΔНм2=0,25 м, и РВ выдаст код высоты H2=L2-ΔНм2=1,25-0,25=1 м, т.е. высота будет определена с погрешностью ΔН2=Н-Н2=1,0625-1=0,0625 м.
Если же ΔL3,4=±0,025 м, то из ПЗУ 5 будут извлекаться коды методической ошибки ΔНм, равные, соответственно, 0,25 м и 0,234 м и выходные коды ВУ 7 будут содержать коды высоты H3=1,091 м и Н4=1,024, т.е. погрешности измерения высоты ΔН3=0,028 м и ΔН4=0,038 м.
Очевидно, что указанные выше погрешности измерения высоты ΔHi возникают как за счет погрешности реализации предлагаемого способа измерения ΔНмi, так и за счет ошибки измерения дальности ΔLi и могут быть определены как
ΔHi=ΔНмi+ΔLi, (3)
где ΔHi - i-я погрешность измерения высоты;
ΔLi - i-я погрешность измерения дальности.
Откуда ΔНмi=ΔНi-ΔLi.
Для рассмотренных выше ошибок измерения дальностей Li и высот Hi методические ошибки измерения высоты, обусловленные предлагаемым способом, составляют:
ΔHм1=ΔH1-ΔL1=0,07-0,051=0,019 м;
ΔHм2=ΔH2-ΔL2=0,0625-0,051=0,011 м;
ΔHм3=ΔH3-ΔL3=0,028-0,025=0,003 м;
ΔHм4=ΔH4-ΔL4=0,038-0,025=0,013 м.
Указанные методические ошибки более чем на порядок меньше методической ошибки (порядка 0.24 м), возникающей при использовании известного способа измерения высоты.
Достоинством предлагаемого способа повышения точности измерения высоты полета ЛА является то, что его реализация практически не приведет к увеличению массы и объема РВ.
Если считать, что максимальная методическая ошибка ΔНм=0,32 м, цена младшего разряда кода поправки Δ=0,0156 м, то в память ПЗУ достаточно записывать 5-разрядные слова (32 бита).
Если принять дискретность ввода методической ошибки по высоте ΔНд=15,625 мм, а максимальную высоту, на которой вводится эта погрешность, Нм=10 м, то число уровней высот, на которых вводится эта погрешность

т.е. на адресный вход ПЗУ надо подавать 10-разрядные слова адреса. Для исключения возможности ввода поправки на высотах, больших Нм=10 м, необходимо вводить еще два старших разряда кода высоты (16 и 32 м).
Таким образом, ПЗУ 5 в этом примере должна иметь 12-разрядный код адреса, следовательно, объем V ПЗУ 5:
V=N·к=4096·32=131072 бит.
Такой объем памяти имеет микросхема 556РТ7, которая рассчитана на прием 12-разрядных слов адреса и выдает 6-разрядные слова данных.
Вычитающее устройство 7 может быть выполнено на микросхемах 564ИМ-1, функциональная схема БИВ 4 зависит от вида модуляции зондирующего сигнала и может быть аналогичной приведенной в [7] (блоки 9, 10, 11, 12) для РВЧМ или в [8] (измеритель задержки 6) для РВ с импульсной модуляцией зондирующего сигнала.
Таким образом, технический эффект предлагаемого способа состоит в повышении точности измерения малых и сверхмалых высот за счет компенсации методической ошибки, вызываемой работой РВ на две разнесенные антенны.
Реализация предлагаемого способа дает возможность разносить приемную и передающую антенны на расстояние, позволяющее уменьшить уровень зондирующего сигнала на выходе приемной антенны, и тем самым повысить качество работы РВ.
Пользуясь сведениями, приведенными в заявке, можно разработать и изготовить на отечественной элементной базе с приемкой 5 РВ для измерения с повышенной точностью малых и сверхмалых высот.
Заявляемый способ измерения радиовысотомером малых и сверхмалых высот полета ЛА может быть использован при разработке радиовысотомеров, предназначенных для использования в системах управления полетом перспективных низковысотных ЛА, имеющих малую дальность обнаружения, и, следовательно, удовлетворяет критерию «Промышленная применимость».
Литература
1. Жуковский А.П., Оноприенко Е.И., Чижов В.И. Теоретические основы радиовысотометрии. - М.: Советское радио, 1979, с.173-174, 228-230.
2. Изделие А-035. Руководство по эксплуатации ГУ 1.000.048 УПКБ «Деталь», 1985.
3. Письмо АНТК «Антонов» исх. 12/7676 от 14.10.2000 г.
4. Титце У., Шенк К. Полупроводниковая схемотехника. - М.: Мир, 1982, с.125-126, с.331-338.
5. Линии задержки теплостойкие типа ЛЗТ. Технические условия ГИО.2206.004 ТУ, 1986.
6. Интерфейсные устройства, платы. Контроллеры и принадлежности индустриальных, бортовых, встроенных систем управления, контроля и сбора данных. Каталог продукции фирмы «Элкус», 2003, с.76.
7. Цифровой частотно-модулированный радиовысотомер. Авторское свидетельство СССР №717676 по заявке 2545867 от 22.11.1977.
8. Радиовысотомер. Патент РФ №1672834, выданный 15.12.1992 по заявке 4677335.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНЫЙ РАДИОВЫСОТОМЕР | 2004 |
|
RU2258943C1 |
| РЕЦИРКУЛЯЦИОННЫЙ РАДИОВЫСОТОМЕР | 2004 |
|
RU2273862C1 |
| СПОСОБ ИЗМЕРЕНИЯ ОТНОСИТЕЛЬНОЙ ВЫСОТЫ ПОЛЕТА РАКЕТЫ КЛАССА "ВОЗДУХ-ПОВЕРХНОСТЬ" | 2002 |
|
RU2249830C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА НА МАЛЫХ И СВЕРХМАЛЫХ ВЫСОТАХ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2014 |
|
RU2568293C1 |
| ИМПУЛЬСНЫЙ РАДИОВЫСОТОМЕР | 2012 |
|
RU2519914C2 |
| СПОСОБ СНИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ИЗМЕРЕНИЯ МАЛЫХ ВЫСОТ ДО НУЛЯ И УСТРОЙСТВО КОГЕРЕНТНОГО ИМПУЛЬСНО-ДОПЛЕРОВСКОГО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2008 |
|
RU2412450C2 |
| РАДИОЛОКАЦИОННЫЙ ИМПУЛЬСНЫЙ РЕЦИРКУЛЯЦИОННЫЙ РАДИОВЫСОТОМЕР | 2004 |
|
RU2282211C2 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ БАРОМЕТРИЧЕСКОГО ВЫСОТОМЕРА С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВОЙ СИСТЕМЫ МЕСТООПРЕДЕЛЕНИЯ | 2006 |
|
RU2316785C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2588105C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ ПАРАМЕТРОВ ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2374609C2 |
Способ измерения радиовысотомером (РВ) малых и сверхмалых высот полета летательного аппарата (ЛА) относится к радиолокационной технике и может быть использован для измерения высоты полета ЛА. Сущность: Вводят литеры РВ, определяемые расстоянием между установленными на ЛА антеннами РВ, вычисляют методические ошибки ΔНм измерения высоты полета ЛА, вызванные работой РВ на две антенны, вводят их при изготовлении РВ в постоянное запоминающее устройство (ПЗУ), измеряют принятыми методами высоту полета Нni, вводят ее в ПЗУ, извлекают из него значение методической ошибки ΔНмi, на измеренной высоте Нni вычитают ее из высоты Нni и полученное значение Н=Hni-ΔНмi выдают потребителю информации о высоте. Достигаемый технический результат: повышается точность измерения малых и предельно малых высот полета ЛА. 1 ил., 1 табл.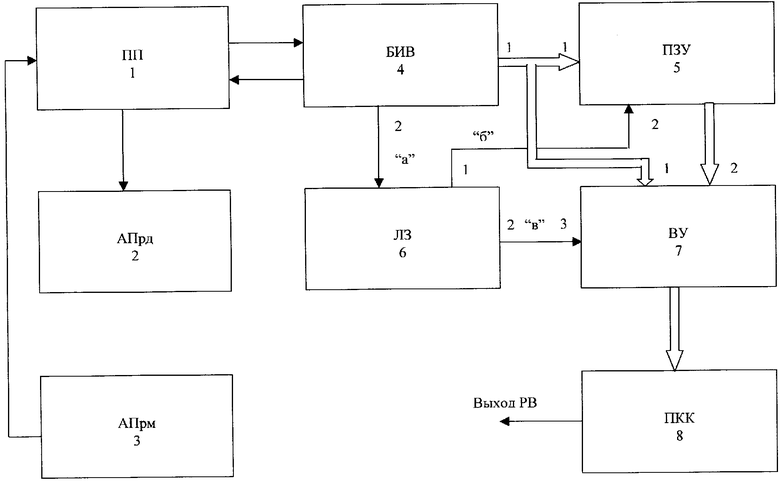
Способ измерения радиовысотомером малых и сверхмалых высот полета летательного аппарата, включающий излучение передающей антенной зондирующего сигнала передатчика, прием приемной антенной отраженных земной поверхностью сигналов, их усиление и преобразование, и измерение времени tкi распространения радиоволн от летательного аппарата до Земли и обратно и преобразование его в двоичный код, отличающийся тем, что в состав радиовысотомера вводят постоянное запоминающее устройство и вычитающее устройство, задаваясь высотой Нi вычисляют методические ошибки ΔНмi измерения высоты радиовысотомером, вызванные его работой на две разнесенные на расстояние R антенны, по формуле
вводят их в постоянное запоминающее устройство при изготовлении радиовысотомера, в процессе полета летательного аппарата измеряют обычными методами (частотным, импульсным или фазовым) высоту Нni полета летательного аппарата в виде двоичного параллельного кода, вводят его в вычитающее устройство и в постоянное запоминающее устройство, извлекают из него значение кода методической ошибки ΔНмi на измеренной высоте полета Hni, вычитают его в вычитающем устройстве из кода высоты Нni и полученное значение кода высоты Н=Нni-ΔНмi выдают потребителям, преобразовав его в код, принятый в системе управления летательного аппарата.
| ЖУКОВСКИЙ А.П | |||
| и др | |||
| Теоретические основы радиовысотометрии | |||
| - М.: Советское радио, 1979, с.173, 174, 228-230, 268-270 | |||
| Радиоинерциальный измеритель высоты | 1981 |
|
SU1022088A1 |
| СИСТЕМА КОРРЕКЦИИ ВЫХОДНОЙ ИНФОРМАЦИИ АВИАЦИОННЫХ ВЫСОТОМЕРОВ | 1980 |
|
SU946336A1 |
| US 4733239 А, 22.03.1988 | |||
| WO 03071371 A1, 17.07.2003. | |||

