Предлагаемое изобретение относится к навигации, а именно к барометрическим высотомерам (баровысотомерам), и может быть использовано в системах управления летательных аппаратов (ЛА), к которым предъявляются требования измерения барометрической высоты с повышенной точностью.
Известен [1], с.37, барометрический высотомер (БВ), предназначенный для измерения барометрической высоты (баровысоты) полета ЛА, в основу работы которого положена зависимость баровысоты от температуры и давления
где НБВ - высота, измеренная баровысотомером;
То - абсолютная температура у поверхности Земли;
τ - температурный градиент;
p - давление на высоте НБВ;
pо - давление у поверхности Земли;
Rτ - газовая постоянная.
При градуировке БВ считается, что То=288,15 К, τ=6,5°С/км, Rτ=29,27 м/°С. Однако в зависимости от климатических условий То, τ, ро и Rτ могут иметь другие значения, что вносит в измерение баровысоты методическую погрешность, к которой добавляется и инструментальная погрешность, вызываемая, например, гистерезисом анероидных коробок, изменением их упругости при изменении температуры окружающей среды, люфтами, трением и другими факторами.
Поэтому принимаются технические решения, направленные на уменьшение методических и инструментальных погрешностей БВ или (и) их компенсацию.
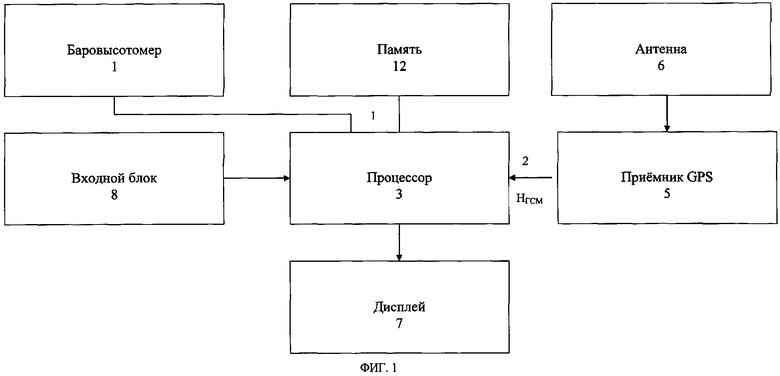
Наиболее близким по технической сущности является способ, описанный в [2], (фиг.1), и состоящий в том, что определяют погрешность баровысотомера ΔНБВ путем сравнения измеренной высоты НБВ с высотой НГСМ с выхода приемника глобальной спутниковой системы местоопределения (ГСМ), которую принимают за эталонную, корректируют на величину ΔНБВ высоту НБВ и результат коррекции выдают потребителям.
Описанный способ реализован в устройстве для калибровки и повышения точности барометрических высотомеров [2], функциональная схема которого приведена на фиг.1. Измеренная БВ 1 высота НБВ поступает на первый вход процессора 3, на второй вход которого поступает информация об НГСМ с выхода приемника 5 ГСМ, вход которого подключен к выходу антенны 6. Процессор 3 вычисляет ошибку баровысотомера
ΔНБВ=НБВ-НГСМ,
корректирует значение НБВ на величину ΔНБВ, полученный результат Н'БВ=НБВ+ΔНБВ выдает потребителю и для индикации на дисплее 7.
Недостатком этого способа повышения точности БВ является относительно высокая погрешность определения эталонной высоты НГСМ, которая, как показано в [3], может достигать 35-50 м, что приводит к такой же погрешности измерения баровысоты.
Целью предлагаемого изобретения является повышение точности измерения барометрической высоты.
Поставленная цель достигается тем, что в способе для калибровки и повышения точности баровысотомера с использованием спутниковой системы местоопределения, включающем определение погрешности ΔНБВ баровысотомера и корректировку на ее значение выходных данных баровысотомера, осуществляют ввод данных о плановых координатах Х и У ЛА с выхода приемника ГСМ в цифровую карту местности, извлекают из нее и вводят в процессор 3 информацию о высоте hp рельефа местности, над которой находится ЛА, вводят в данный момент Т в процессор информацию о барометрической высоте НБВ с выхода барометрического высотомера и о радиовысоте НРВ с выхода радиовысотомера, суммируют НРВ и hp, вычисляют погрешность баровысотомера как ΔНБВ=НБВ-(НРВ+hp), корректируют НБВ на величину ΔНБВ и откорректированное значение Н'БВ = НБВ + ΔНБВ выдают потребителям.
Сущность предлагаемого способа состоит в том, что в качестве эталонной высоты Нэ, необходимой для определения погрешности НБВ, используется сумма высот НРВ, измеренной радиовысотомером, и высоты рельефа hp, над которой находится ЛА, НЭ = НРВ + hp.
Сравнение предлагаемого способа с прототипом показывает наличие дополнительных действий, а именно:
- вводят данные о плановых координатах Х и Y ЛА с выхода приемника ГСМ типа ГЛОНАСС или GPS в цифровую карту местности (ЦКМ);
- извлекают из ЦКМ информацию о высоте hp рельефа местности;
- измеряют высоту НРВ радиовысотомером;
- определяют эталонную высоту НЭ = НРВ + hp;
- вычисляют поправки ΔНБВ = НБВ - НЭ = НБВ-(НРВ + hp).
Введение подобных действий для повышения точности измерения барометрической высоты неизвестно, что позволяет сделать вывод о соответствии предлагаемого решения критерию «Новизна».
Вновь вводимые блоки, необходимые для реализации предлагаемого способа повышения точности измерения барометрической высоты, широко применяются в системах управления ЛА и описаны в известной литературе [4, 5]. Однако их введение в указанных связях позволяет повысить точность измерения баровысотомера.
Такое решение не следует из уровня техники, что соответствует критерию «Изобретательский уровень».
Способ может найти применение в системах управления ЛА, к которым предъявляются повышенные требования к точности измерения баровысоты.
Сущность предлагаемого изобретения поясняется дальнейшим описанием и чертежами, на которых представлены:
фиг.1 - функциональная схема, поясняющая принцип работы прототипа;
фиг.2 - функциональная схема, поясняющая предлагаемый способ повышения точности измерения баровысотомера.
На фиг.2 обозначены:
1 - баровысотомер (БВ);
2 - радивысотомер (РВ);
3 - процессор;
4 - цифровая карта местности (ЦКМ);
5 - приемник глобальной системы местоопределения (ПГСМ);
6 - антенна.
Баровысотомер 1 предназначен для измерения барометрической высоты НБВ.
Радиовысотомер 2 служит для измерения радиовысоты НРВ.
Процессор 3 обеспечивает вычисление эталонной высоты НЭ, ошибки ΔНБВ измерения барометрического высотомера, корректировку на ее значение измеренной баровысоты НБВ и выдачу откорректированного значения Н'БВ = НБВ + ΔНБВ потребителям.
Цифровая карта местности 4 предназначена для хранения и выдачи информации о высотах рельефа hp, соответствующих введенным в нее плановым координатам Х и Y.
Приемник 5 ГСМ служит для обработки информации спутников глобальной системы навигации типа ГЛОНАСС, GPS или других и выдачи информации о плановых координатах Х и Y ЛА.
Антенна 6 предназначена для приема сигналов спутниковых передатчиков указанных выше глобальных навигационных систем.
Принцип повышения точности БВ состоит в следующем.
В момент Т выдачи ПГСМ 5 информации о плановых координатах Х и Y процессор 3 записывает код измеренной высоты НБВ, поступающий на его первый вход, код высоты НРВ, измеренной радиовысотомером 2, поступающий на его второй вход и на третий вход - код высоты рельефа hp, относительно уровня моря из цифровой карты местности 4, который получают путем ввода в нее информации о плановых координатах ЛА с выхода ПГСМ 5.
Процессор 3 по заданному алгоритму вычисляет погрешность баровысотомера

Оценим точность вычисления поправки ΔНБВ, которая определяется погрешностью измерения высоты ΔНРВ и погрешностью Δhp данных о высоте hp рельефа.
Как показано в [6], с.8,

где Н - высота полета ЛА.
Если, например, высота полета ЛА
Н=1000 м, то ΔНРВ=6 м.
В свою очередь согласно [5], с.47, среднеквадратическая погрешность высоты hp определяется как


где σПК - погрешность первичного картографирования;
σq - погрешность дискретизации рельефа.
Согласно графикам, приведенным в [5], с.48, для среднепересеченной местности σq<1,5 м при шаге дискретизации Ш=250 м, а σПК=2÷3 м.
Тогда

Принимая Δhp=2σK, получим
ΔНБВ=ΔНРВ+Δhp=6+7=13 м.
Следовательно, погрешность калибровки БВ в предлагаемом способе более чем в 3 раза меньше, чем при калибровке по способу, изложенному в прототипе, и меньше допустимой погрешности измерения высоты более 260 м радиовысотомером РВЭ [8], используемым в составе ракеты Х-35Э.
Приборная реализация предлагаемого способа повышения точности измерения баровысотомера может быть осуществлена аппаратно-программным методом и не приведет к значительному увеличению объема и массы по сравнению с прототипом, т.к. радиовысотомеры применяются практически на всех ЛА, в качестве процессора 3 может быть использована бортовая цифровая вычислительная машина, а как показано в [9], для обеспечения полета ЛА в зоне 200×200 км необходимая ЦКМ 4 может быть реализована на одной микросхеме типа LH28F032SUTD [10].
Состав аппаратуры, необходимый для реализации предлагаемого способа повышения точности измерения барометрической высоты, при полете ЛА только над морской поверхностью упрощается, так как в этом случае hp=0 и нет необходимости ввода в состав устройства ЦКМ 4, ПГСМ 5 и антенны 6.
Заявляемый способ повышения точности барометрических высотомеров удовлетворяет критерию «Промышленная применяемость», так как может быть использован в системах управления ЛА, к которым предъявляются требования повышенной точности измерения баровысоты, например в системах точного бомбометания. Откорректированную информацию о баровысоте можно применять для целей управления полетом ЛА в вертикальной плоскости на высотах, больших 260 м, и использовать радиовысотомер в режиме кратковременного излучения, и тем самым повысить такой важный параметр, как скрытность полета ЛА.
Источники информации
1. Федоров С.М., Михайлов О.И., Сухих Н.Н. Бортовые информационно-управляющие системы. - М.: Транспорт, 1994, с.37-40.
2. Способ и устройство для калибровки и повышения точности барометрических высотомеров с использованием спутниковой системы местоопределения. Патент США №6768449 ВА кл. 7 G01S 3/02 от 27.07.2004 по заявке US 2002299932 от 19.11.2002. // Изобретения стран мира, МПК G01R, S, вып.85, №14, 2005, с.34.
3. Глобальная спутниковая радионавигационная система ГЛОНАСС / Под редакцией В.Н.Харисова, А.Н.Перова, В.А.Болдина. 2-ое изд. исправ. - М.: ИПРЖР, 1999, с.387.
4. Жуковский А.П., Оноприенко Е.К., Чижов В.И. Теоретические основы радиовысотометрии. - М.: Сов. радио, 1979, с.10-17.
5. И.Н.Белоглазов, Г.И.Джанджгава, В.И.Чигин. Основы навигации по геофизическим полям. - М.: Наука, 1985, с.47-48, 107, 162-165.
6. Изделие А-035. Техническое описание ГУ 1.000.048 ТО. // Уральское проектно-конструкторское бюро «Деталь», 1983.
7. Электронный барометрический высотомер БВЭ-СВС: Рекламный проспект // ОАО «Аэроприбор - Восход», 2005.
8. Радиовысотомер РВЭ: Рекламный проспект // УПКБ "Деталь", 2005.
9. Способ измерения относительной высоты полета ракеты класса "воздух-поверхность": Патент РФ №2249830 по заявке №2002131103/09(032906) от 19.11.2002.
10. Sharp FLASAH Memory LH28F032SUTD: Рекламный проспект фирмы SHARP, 2002.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ БОРТОВОГО ПРИЕМОИНДИКАТОРА СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 2003 |
|
RU2254591C2 |
| СПОСОБ МОНИТОРИНГА ВЫДЕРЖИВАНИЯ ВЫСОТЫ ЭШЕЛОНА ПОЛЕТА | 2008 |
|
RU2390793C1 |
| Способ определения барометрической высоты летательного аппарата в полете с использованием бортовых спутниковых навигационных приемников и авиационных метеорологических прогнозов | 2024 |
|
RU2824733C1 |
| СПОСОБ ИЗМЕРЕНИЯ ОТНОСИТЕЛЬНОЙ ВЫСОТЫ ПОЛЕТА РАКЕТЫ КЛАССА "ВОЗДУХ-ПОВЕРХНОСТЬ" | 2002 |
|
RU2249830C2 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ БОРТОВОГО ПРИЕМОИНДИКАТОРА СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 2024 |
|
RU2832566C1 |
| Способ и система формирования оценки абсолютной высоты полета летательного аппарата, многофункциональный маневренный самолет с такой системой | 2017 |
|
RU2671613C1 |
| АЭРОГРАВИМЕТРИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2090911C1 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ АБСОЛЮТНОЙ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2346242C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ОБЪЕКТА | 2000 |
|
RU2182713C2 |
Способ повышения точности барометрического высотомера относится к навигации и может быть использован в системах управления летательных аппаратов (ЛА), к которым предъявляются требования повышенной точности измерения баровысоты НБВ. Сущность: с помощью приемника глобальной системы местоопределения вычисляют плановые координаты ЛА, определяют по ним высоту hp рельефа местности, над которой находится ЛА, суммируют hp с данными радиовысотомера НРВ, определяют погрешность баровысотомера ΔНБВ=НБВ-(НРВ+hp), корректируют НБВ на величину ΔНБВ и полученный результат выдают потребителю информации о баровысоте. Достигаемый технический результат: повышение точности измерения барометрической высоты полета ЛА. 2 ил.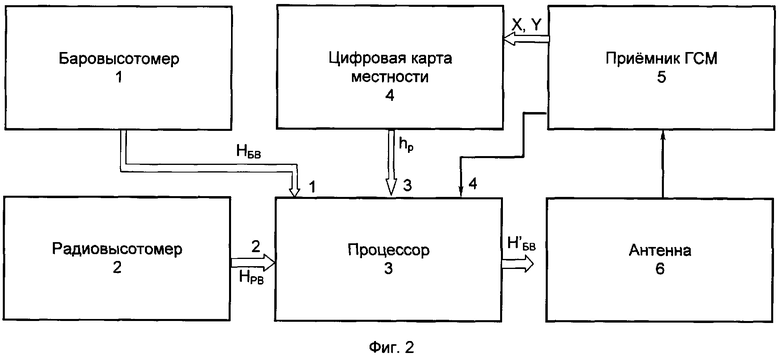
Способ повышения точности барометрического высотомера с использованием спутниковой системы местоопределения, включающий определение погрешности ΔНБВ баровысотомера и корректировку выходных данных баровысотомера на величину этой погрешности, отличающийся тем, что осуществляют ввод данных о плановых координатах Х и У летательного аппарата (ЛА) с выхода приемника глобальной спутниковой системы местоопределения типа ГЛОНАСС или GPS в цифровую карту местности, извлекают из нее и вводят в процессор информацию о высоте hp рельефа местности, над которой находится ЛА, вводят в данный момент Т в процессор информацию о барометрической высоте НБВ с выхода барометрического высотомера и о радиовысоте НРВ с выхода радиовысотомера, суммируют НРВ и hp, вычисляют погрешность барометрического высотомера как ΔНБВ=НБВ-(НРВ+hp), корректируют НБВ на величину ΔНБВ и откорректированное значение Н′БВ=НБВ+ΔНБВ выдают потребителям.
| US 6768449 B1, 27.07.2004 | |||
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ БОРТОВОГО ПРИЕМОИНДИКАТОРА СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 2003 |
|
RU2254591C2 |
| СПОСОБ ПЕРИОДИЧЕСКОГО КОНТРОЛЯ (МОНИТОРИНГА) СРЕДСТВ ИЗМЕРЕНИЯ БАРОМЕТРИЧЕСКОЙ ВЫСОТЫ САМОЛЕТОВ ПРИ ИХ ЭКСПЛУАТАЦИИ | 2002 |
|
RU2221221C1 |
| RU 2058556 C1, 20.04.1996 | |||
| WO 2004085961 A2, 07.10.2004 | |||
| US 2004196176 A1, 07.10.2004. | |||

