Изобретение относится к авиационной технике, в частности дистанционным пилотируемым летательным аппаратам (ДПЛА) с использованием оператора на борту вертолета на режиме висения с целью теле-(фото-) разведки удаленных наземных объектов.
Известна система управления положением вертолета, содержащая пульт управления, блок формирования и интегрирования команд управления, автопилот, телевизионный индикатор, датчик углового положения и датчик скорости (US, патент №4373184, кл. G 06 F 15/50, 1983 г.). Недостатком такой системы является ограниченная точность висения вертолета над земной поверхностью, так как отсутствует визуальная информация о положении вертолета относительно ориентиров на местности и не предусмотрено измерение отклонений вертолета от заданной точки висения.
Наиболее близким к предлагаемому комплексу является система управления положением вертолета, обеспечивающая надежную фиксацию положения и/или малые перемещения вертолета над заданной точкой висения, путем точного измерения отклонений вертолета от заданной точки висения посредством анализа телевизионного сигнала от видеокамеры, размещенной под фюзеляжем вертолета (RU, свидетельство №6249, U1, 6 G 05 D 1/08, 1988 г.). Данное техническое устройство обеспечивает автоматическое управление вертолетом на режиме точного висения и телевизионного обзора, а также малые (в пределах метров) перемещения вертолета. Такие качества вертолета широко используются при выполнении разного рода работ, например монтажных, поисково-спасательных, противопожарных, специальных, в том числе и для управления ДПЛА. Существенным недостатком такого рода технического устройства является отсутствие на борту вертолета автоматизированного рабочего места (АРМ) оператора для управления ДПЛА на режиме точного висения вертолета.
Целью изобретения является создание вертолетного комплекса управления ДПЛА. Существенным недостатком такого рода технического устройства является отсутствие на борту вертолета автоматизированного рабочего места (АРМ) оператора для управления ДПЛА на режиме точного висения вертолета.
Целью изобретения является создание вертолетного комплекса управления ДПЛА.
Поставленная цель достигается тем, что вертолетный комплекс управления ДПЛА содержит автоматизированное рабочее место оператора для управления ДПЛА, расположенное в кабине вертолета, содержащей пульт управления вертолетом, телевизионный индикатор вертолета, блок формирования команд управления, соединенный с выходом пульта управления вертолетом и входом блока автопилота с датчиками, телевизионную камеру вертолета, связанную с входом блока анализа телевизионных сигналов, первый выход которого подключен к входу пульта управления вертолетом, второй выход блока анализа телевизионного сигнала соединен с телевизионным индикатором вертолета, третий выход соединен с сигнальным входом блока формирования команд управления, индикаторные входы которого связаны с датчиками. Система ручного управления вертолетом штатная и содержит кинематически связанные блоки ручного управления, механизм триммирования, раздвижную тягу и исполнительный механизм. Автоматизированное рабочее место оператора для управления ДПЛА содержит пульт управления ДПЛА, телевизионный индикатор ДПЛА, входы которых связаны с выходом блока формирования команд управления вертолетом, с целью сигнализации оператору ДПЛА режима работы системы точного висения и телевизионного обзора, блок передачи/приема данных вертолета, сопряженный через радиоканал с блоком передачи/приема данных ДПЛА, выход которого соединен с входом блока траекторного управления ДПЛА, при этом сигналы с выхода телевизионной камеры ДПЛА в виде изображений наземных объектов в поле зрения телевизионной камеры ДПЛА поступают на другой вход блока передачи/приема данных ДПЛА для передачи изображений по радиоканалу на блок передачи/приема данных вертолета и далее через наземный блок передачи/приема данных, локальные (региональные) информационно-вычислительные компьютерные сети и/или спутниковые системы связи на наземный командный пункт управления для принятия решений.
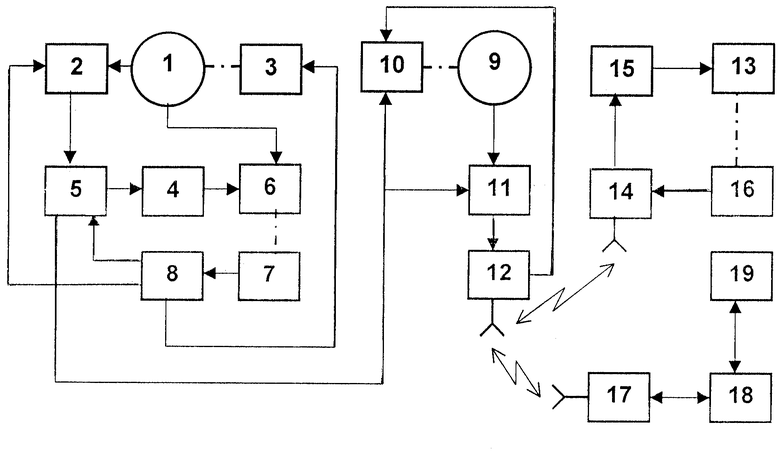
Блок-схема вертолетного комплекса управления ДПЛА представлена на чертеже.
Предлагаемый вертолетный комплекс управления ДПЛА имеет рабочее место летчика с системой ручного управления I, расположенное в кабине экипажа вертолета 6, содержащей пульт управления вертолетом 2, телевизионный индикатор вертолета 3, блок автопилота с датчиками 4, блок формирования команд управления вертолетом 5, телевизионную камеру вертолета 7, блок анализа телевизионного сигнала 8, автоматизированное рабочее место оператора ДПЛА 9, телевизионный индикатор ДПЛА 10, пульт управления ДПЛА 11, блок передачи/приема команд на борт вертолета 12, блок передачи/приема данных ДПЛА 14 с борта ДПЛА 13, блок траекторного управления ДПЛА 15, телевизионную камеру ДПЛА 16, наземный блок приема-передачи данных 17, блок локальной (региональной) компьютерной сети и/или спутниковая система связи 18, наземный командный пункт управления 19. Вертикальный комплекс управления ДПЛА работает следующим образом.
Предварительно в процессе полета вертолета 6 и ДПЛА 13 летчик с помощью пульта управления 2, блока формирования команд управления 6, блока автопилота с датчиками 4, телевизионной камеры 7 и телевизионного индикатора 3 осуществляет вывод вертолета в заданную точку на земной поверхности. В результате в блоке анализа телевизионного сигнала 8 происходит измерение отклонений вертолета от заданной точки, при этом сигнал рассогласования автоматически поступает в блок телевизионного индикатора 3, в блок пульта управления вертолетом 2, в блок формирования команд управления 5 и далее в блок автопилота 4, тем самым осуществляется режим точного висения и телевизионного обзора вертолета. Одновременно сигнал с блока формирования команд управления 5 поступает в блоки 10 и 11 на рабочее место оператора управления ДПЛА 9, сигнализирующие о функционировании режима точного висения и телевизионного обзора вертолета. При этом оператор ДПЛА 9 через пульт управления 11 с использованием телевизионного индикатора ДПЛА 10, блока передачи/приема данных вертолета 12, блока передачи/приема данных ДПЛА 14 осуществляет управление ДПЛА 13 по заданному маршруту через блок траекторного управления ДПЛА 15, причем обратная связь управления ДПЛА осуществляется изменением изображений, получаемых от телевизионных камер вертолета 7 и ДПЛА 16 на телевизионный индикатор ДПЛА 10 через блоки передачи/приема данных 14 и 12. Полученные изображения местности при полете ДПЛА по маршруту одновременно поступают на наземный блок приема/передачи данных 17 и далее через блок локальных (региональных) компьютерных сетей и/или спутниковую систему связи [18] на наземный командный пункт управления [19] для принятия решений.
Тем самым цель изобретения достигнута.
В качестве локальных (региональных) компьютерных информационно-вычислительных сетей могут быть использованы научно-образовательные сети России “RUNNET” и “FREEnet”, а также “Internet” (“RUNNET”, Республиканский научный центр компьютерных телекоммуникационных сетей высшей школы, г.Санкт-Петербург, 1996 г.).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ВЕРТОЛЕТА В РЕЖИМЕ ВИСЕНИЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2244339C1 |
| АЭРОМОБИЛЬНЫЙ КОМПЛЕКС БЕСПИЛОТНОГО ВЕРТОЛЕТА | 2009 |
|
RU2403181C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ВЕРТОЛЕТА | 1999 |
|
RU2150137C1 |
| ВЕРТОЛЕТ ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ | 2003 |
|
RU2265555C2 |
| АЭРОМОБИЛЬНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ВЕРТОЛЕТНОГО ТИПА | 2022 |
|
RU2792314C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ КОМПЛЕКС ДИАГНОСТИКИ ПРОТЯЖЕННЫХ ОБЪЕКТОВ, ОСНАЩЕННЫХ СОБСТВЕННОЙ ИНФОРМАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2343438C1 |
| НЕОРТОГОНАЛЬНЫЙ ГРАВИИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС | 2001 |
|
RU2189617C1 |
| ВИРТУАЛЬНЫЙ ТРЕНАЖЕР ВЕРТОЛЕТА | 1998 |
|
RU2149462C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ ТАКТИЧЕСКОГО НАЗНАЧЕНИЯ | 2003 |
|
RU2226166C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2019 |
|
RU2725928C1 |
Изобретение относится к авиационной технике. Комплекс содержит рабочее место летчика в кабине экипажа вертолета с пультом управления вертолетом и телевизионным индикатором вертолета. Имеется блок формирования команд управления, соединенный с пультом управления вертолетом и датчиками блока автопилота. Телевизионная камера вертолета связана с блоком анализа телевизионного сигнала, который подключен к пульту управления вертолетом, телевизионному индикатору вертолета и блоку формирования команд управления. В комплекс дополнительно введено автоматизированное рабочее место оператора дистанционно пилотируемого летательного аппарата (ДПЛА) с пультом управления ДПЛА и телевизионным индикатором ДПЛА, которые в диалоговом режиме связаны с блоком формирования команд управления. Предусмотренный блок передачи/приема данных вертолета сопряжен через радиоканал с блоком передачи/приема данных ДПЛА, соединенным с блоком траекторного управления ДПЛА. Телевизионная камера ДПЛА установлена с возможностью поступления с нее сигналов на блок передачи/приема данных ДПЛА и далее по радиоканалу - на блок передачи/приема данных вертолета и на наземный блок передачи/приема данных. Последний связан через блок локальной компьютерной сети и/или спутниковой системы связи с наземным командным пунктом управления, обеспечивающим принятие решений. Изобретение позволяет повысить точность управления ДПЛА. 1 ил.
Вертолетный комплекс управления дистанционным пилотируемым летательным аппаратом (ДПЛА), содержащий рабочее место летчика в кабине экипажа вертолета с пультом управления вертолетом и телевизионным индикатором вертолета, блок формирования команд управления, соединенный одним из входов с выходом пульта управления вертолетом, а информационными выходами - с датчиками блока автопилота, телевизионную камеру вертолета, связанную с входом блока анализа телевизионного сигнала, первый выход которого подключен к соответствующему входу пульта управления вертолетом, второй выход - ко входу телевизионного индикатора вертолета, а третий выход - к другому входу блока формирования команд управления, отличающийся тем, что дополнительно введено автоматизированное рабочее место оператора ДПЛА, содержащее пульт управления ДПЛА и телевизионный индикатор ДПЛА, входы которых в диалоговом режиме связаны с выходом блока формирования команд управления, блок передачи/приема данных вертолета, сопряженный через радиоканал с блоком передачи/приема данных ДПЛА, выход которого соединен с входом блока траекторного управления ДПЛА, телевизионную камеру ДПЛА, установленную с возможностью поступления с нее сигналов на другой вход блока передачи/приема данных ДПЛА и далее по радиоканалу - на блок передачи/приема данных вертолета и на наземный блок передачи/приема данных, связанный через блок локальной компьютерной сети и/или спутниковой системы связи с наземным командным пунктом управления, обеспечивающим принятие решений.
| Устройство для предупреждения приема поездов на пути, на которые производится прием как четных, так и нечетных поездов | 1924 |
|
SU6249A1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2001 |
|
RU2189625C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С КОМПЛЕКСНЫМ НАВИГАЦИОННЫМ УСТРОЙСТВОМ | 1994 |
|
RU2046736C1 |
| RU 93035188 А, 10.03.1997. | |||

