Группа изобретений относится к технике управления положением вертолета в режиме малых скоростей и висении над заданной точкой и предназначена для использования при осуществлении выхода вертолета в заданную точку и последующего приведения к ней.
Способность висеть в воздухе является одной из важнейших особенностей вертолета, делающих целесообразным его как летательного аппарата.
Известны способы и системы для управления положением вертолета, базирующиеся на совместном использовании автоматического и ручного управления исполнительными механизмами с комплексной обработкой информации от датчиков параметров, формированием законов управления и обеспечением стабилизации процессов управления при отказе или нарушении нормального функционирования информационных средств (US 4029271 А, G 05 D 1/00, 14.06.1977; RU 2150137 С1, G 05 D 1/08, 27.05.2000; RU 1797383 А1, G 05 D 1/02, 10.04.1995).
Недостатки известных технических решений связаны с отсутствием надлежащего обзора поверхности под вертолетом и сложностью управления им, что создает трудности в выполнении режима висения и вертикальной посадки. Эти важнейшие режимы становятся очень сложными и опасными в условиях ограниченной видимости земли и при работе с внешней подвеской, например, при монтажных и спасательных работах.
В настоящее время широкое распространение получают способы и системы управления вертолетом с телевизионным обзором поверхности под вертолетом (RU 2212632 С1, G 01 С 23/00, 20.09.2003; RU 2170409 С1, G 01 С 23/00, 10.07.2001; RU 6249 U1, G 05 D 1/08, 16.03.1998).
Наиболее близким к предложенному способу является способ управления вертолетом в режиме висения, предусматривающий телевизионный обзор поверхности под вертолетом и определение отклонения от заданной точки висения в земной системе координат (в горизонтальной плоскости), индицирование полученного изображения поверхности и соответствующее воздействие на управляющие органы (RU 6249 U1).
Наиболее близкой к предложенной системе является система управления вертолетом в режиме висения, в состав которой входят пульт управления, датчик высоты и/или отклонения от заданной высоты, телевизионная камера для телевизионного обзора поверхности под вертолетом и индикатор для индицирования изображения полученного изображения (RU 6249 U1).
В указанных способе и системе за счет обеспечения телевизионного обзора поверхности под вертолетом и одновременной выработки информации об отклонении от заданного места висения появляется возможность существенно увеличить качество и повысить безопасность выполнения режима висения.
Однако известные способ и система могут использоваться только на вертолетах, имеющих автопилот, и не обеспечивают летчика достоверной информацией о точном положении вертолета (например, его центра тяжести) в горизонтальной плоскости и по высоте относительно места выполнения работ на экране телевизионного индикатора. Кроме того, на индикаторе отсутствует информация об угловом положении вертолета.
Летчик вынужден отвлекать свое внимание для получения недостающей информации по другим информационным системам (приборам), что снижает качество пилотирования и безопасность выполнения режима.
Техническим результатом предложения является создание способа и системы, обеспечивающих увеличение точности управления положением вертолета в режиме висения за счет более наглядного и полного информационного обеспечения летчика как при ручном, так и при автоматическом управлении вертолетом. Необходимо отметить, что на всех современных (отечественных и зарубежных) вертолетах автопилот включается в систему управления по так называемой последовательной (дифференциальной) схеме, т.е. летчик и автопилот работают совместно на ответственных режимах полета.
Поставленная задача решается тем, что в способе управления вертолетом в режиме висения, согласно которому осуществляют инструментальный, например телевизионный, обзор поверхности под вертолетом и определяют текущую высоту висения и/или текущее отклонение от заданной высоты, индицируют полученное изображение поверхности и с учетом индицированного изображения поверхности и определенных высоты и/или отклонения от заданной высоты воздействуют на управляющие органы для выведения и поддержания вертолета над заданным местом висения на заданной высоте, - определяют угловые данные по крену и тангажу вертолета, на индицированном изображении поверхности под вертолетом формируют по ним изображение вертикальных в земной системе координат проекций продольной и поперечной осей вертолета, проходящих через центр тяжести вертолета, или параллельных им осей, направленных через элементы конструкции вертолета, а также наносят изображение высотной шкалы с символом заданной высоты висения и индексом, указывающим текущую высоту висения и/или текущее отклонение от заданной высоты, и добиваются совмещения точки пересечения проекций осей с изображением заданного места висения и размещения индекса на высотной шкале у символа заданной высоты висения.
Поставленная задача решается также тем, что в систему управления вертолетом в режиме висения, содержащую установленные на нем пульт управления, датчик высоты и/или отклонения от заданной высоты, телевизионную камеру, выполненную с возможностью телевизионного обзора поверхности под вертолетом, и индикатор, выполненный с возможностью индицирования изображения полученного изображения, - введены датчик крена и тангажа и блок обработки телевизионной информации, соединенный входами с выходами пульта управления, телевизионной камеры, датчика крена и тангажа, датчика высоты, а выходом - со входом индикатора и выполненный с возможностью формирования на индицированном изображении поверхности под вертолетом по сигналам крена и тангажа изображения вертикальных в земной системе координат проекций продольной и поперечной осей вертолета, проходящих через центр тяжести вертолета, или параллельных им осей, направленных через элементы конструкции вертолета, а также нанесения изображения высотной шкалы с символом заданной высоты висения и индексом, указывающим текущую высоту висения и/или текущее отклонение от заданной высоты, для обеспечения совмещения точки пересечения проекций осей с изображением заданного места висения и размещения индекса на высотной шкале у символа заданной высоты висения.
Решению поставленной задачи способствуют частные существенные признаки группы изобретений.
На индицированном изображении безориентирной поверхности под вертолетом дополнительно формируют символ заданного места висения на поверхности под вертолетом в горизонтальной плоскости, например, в виде перекрестия и совмещают точку пересечения проекций осей вертолета с указанным символом.
Для обеспечения возможности коррекции местоположения вертолета в горизонтальной плоскости осуществляют коррекцию положения символа заданного места висения на изображении поверхности под вертолетом.
Для обеспечения возможности коррекции местоположения вертолета в вертикальной плоскости осуществляют коррекцию положения на высотной шкале символа заданной высоты висения.
Формируют сигналы управления, соответствующие наблюдаемой разности между текущим и заданным местоположением вертолета в горизонтальной и вертикальной плоскостях, и подают их в автопилот вертолета.
Блок обработки телевизионной информации может быть выполнен с возможностью дополнительного формирования на индицированном индикатором изображении безориентирной поверхности под вертолетом символа заданного места висения на поверхности под вертолетом в горизонтальной плоскости, например, в виде перекрестия и обеспечения совмещения точки пересечения проекций осей вертолета с указанным символом.
В систему могут быть введены один или более датчиков параметров движения вертолета, выходы которых соединены с дополнительными входами блока обработки телевизионной информации.
В систему может быть введен блок формирования команд управления, вход которого связан с дополнительным выходом блока обработки телевизионной информации, а выход - со входом автопилота вертолета.
В систему могут быть введены одна или более дополнительных телевизионных камер, выходы которых соединены с дополнительными входами блока обработки телевизионной информации.
В систему может быть введен блок передачи данных, взаимосвязанный с блоком обработки телевизионной информации и вертолетной радиотехнической системой.
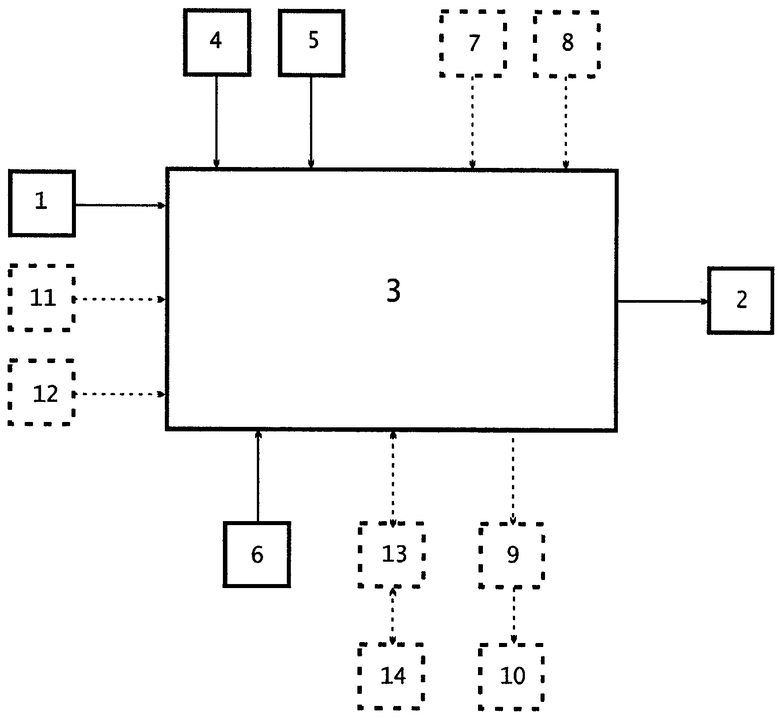
На чертеже представлена функциональная схема предложенной системы управления вертолетом, реализующей предложенный способ.
На схеме обозначены: телевизионная камера 1, индикатор (телевизионный) 2, блок 3 обработки телевизионной информации, датчик 4 крена и тангажа, датчик 5 высоты, пульт 6 управления, датчики 7, 8 параметров движения вертолета, блок 9 формирования команд управления, автопилот 10, дополнительные телевизионные камеры 11, 12, блок 13 передачи данных и вертолетная радиотехническая система 14.
Телевизионные камеры 1, 11, 12 выполнены с возможностью телевизионного обзора поверхности под вертолетом, а индикатор 2 - с возможностью индицирования изображения полученного изображения.
Блок 3 обработки телевизионной информации соединен входами с выходами пульта 6 управления, телевизионных камер 1, 11, 12, датчика 4 крена и тангажа, датчика 5 высоты, датчиков 7, 8 параметров движения вертолета, а выходами - со входом индикатора 2 и блока 9 формирования команд и управления выполнен с возможностью формирования на индицированном изображении поверхности под вертолетом по сигналам крена и тангажа изображения вертикальных в земной системе координат проекций продольной и поперечной осей вертолета, проходящих через центр тяжести вертолета, или параллельных им осей, направленных через элементы конструкции вертолета, а также нанесения изображения высотной шкалы с символом заданной высоты висения и индексом, указывающим текущую высоту висения и/или текущее отклонение от заданной высоты, для обеспечения совмещения точки пересечения проекций осей с изображением заданного места висения и размещения индекса на высотной шкале у символа заданной высоты висения.
Блок 3 обработки телевизионной информации может быть выполнен с возможностью дополнительного формирования на индицированном индикатором изображении безориентирной поверхности под вертолетом символа заданного места висения на поверхности под вертолетом в горизонтальной плоскости, например, в виде перекрестия и обеспечения совмещения точки пересечения проекций осей вертолета с указанным символом.
Выход блока 9 формирования команд связан со входом автопилота 10.
Блок 13 передачи данных взаимосвязан с блоком 3 обработки телевизионной информации и вертолетной радиотехнической системой 14.
Система работает следующим образом.
Телевизионная камера 1 устанавливается на вертолете так, чтобы обеспечить просмотр поверхности под вертолетом. Телевизионный сигнал с телекамеры 1 поступает на телевизионный вход блока 3 обработки телевизионной информации. На один из сигнальных входов блока 3 подаются сигналы об углах крена и тангажа с выхода датчика 4 крена и тангажа.
В блоке 3 обработки телевизионной информации по сигналам крена и тангажа формируется символическая информация (например, перекрестие) о положении на наблюдаемой поверхности под вертолетом проекций продольной и поперечной осей вертолета, проходящих через центр тяжести вертолета или паралельных им, проходящих через элементы конструкции вертолета, положение которых надо удерживать над заданным местом на поверхности под вертолетом.
Суммарный телевизионный сигнал, т.е. телевизионное изображение поверхности под вертолетом с наложенной на него символической информацией с выхода блока 3 обработки телевизионной информации подается на индикатор 2.
Летчик, управляя вертолетом, совмещает символическую информацию о проекциях осей вертолета с наблюдаемым объектом (ориентиром) на экране индикатора 2, т.е. накладывает центр перекрестия на выбранный на экране индикатора 2 объект. При этом масштаб отклонения планок перекрестия выбирается соответствующим полю зрения.
Повышение качества управления и увеличение безопасности полета достигаются гармоничным сочетанием возможности обзора поверхности под вертолетом с наглядной индикацией местоположения вертолета на ней и одновременной оценки пространственного углового положения вертолета по положению и перемещению планок перекрестия.
Если необходимо осуществить висение не над заметным ориентиром, то в блоке 3 обработки телевизионной информации реализуется функция привязки к заданному месту висения на основе обработки телевизионного сигнала и формирование символической информации о положении этого места (например, в виде небольшого креста) на наблюдаемой поверхности под вертолетом.
Включение этого режима осуществляется с пульта 6 управления. При этом подается команда с его выхода на другой вход блока 3 обработки телевизионной информации. Сочетание символической информации и информации о заданном месте висения подается одновременно на индикатор 2.
Летчик управляет вертолетом, совмещая на фоне изображения поверхности под вертолетом точку пересечения проекций осей вертолета с символом заданного места висения (центром малого креста), т.е. совмещает большое и малое перекрестия.
В данном случае увеличивается точность и безопасность висения над безориентирным местом.
Одновременно с вычислением заданного места висения в блоке 3 обработки телевизионной информации по команде с пульта 6 управления на основе обработки телевизионного сигнала вычисляется и формируется символическая информация об отклонении от заданной высоты висения.
Символическая информация об отклонении от заданной высоты висения также выдается на индикатор 2 в виде высотной шкалы и индекса, формируемых на левом или правом краях экрана.
Для осуществления висения над заданной точкой летчик управляет вертолетом таким образом, чтобы на экране индикатора 2 в дополнение к совмещению перекрестия с крестом (в горизонтальной плоскости) одновременно имело место управление высотой (в вертикальной плоскости ) по высотному символу на экране индикатора 2.
В данном случае возможно висение и вертикальное перемещение над безориентированным местом.
С пульта 6 управления может осуществляться коррекция заданных места висения и высоты, что расширяет возможности системы.
Для обеспечения летчика информацией о высоте висения на еще один сигнальный вход блока 3 обработки телевизионной информации с датчика 5 высоты подается сигнал высоты.
В блоке 3 обработки телевизионной информации формируется символическая информация о высоте, которая подается на индикатор 2. Вид символической информации о высоте может быть таким же, как и в предыдущем случае.
Это дополнительно увеличивает безопасность полета, особенно вертикальное маневрирование, включая посадку.
Для облегчения работы системы в условиях плохой видимости и безориентированной местности (например, водная поверхность, снег) на дополнительные сигнальные входы блока 3 обработки телевизионной информации подаются сигналы от датчиков 7, 8 движения вертолета, имеющих иную, чем телевизионная камера 1 физические принципы измерения (например, спутниковые, инерциальные, доплеровские, лазерные и т.п. системы). В блоке 3 обработки телевизионной информации осуществляется комплексная обработка информации с этих датчиков.
Обработка информации о заданном месте висения может осуществляться как с использованием телевизионной информации, так и независимо от нее. В результате обеспечивается дополнительное увеличение безопасности. Отказобезопасность и расширение условий работы системы достигаются за счет функционального резервирования и увеличения качества и достоверности формируемой символической информации путем комплексной обработки.
Для обеспечения автоматической стабилизации через автопилот 10 вертолета в систему вводится блок 9 формирования команд управления, на вход которого подаются сигналы об отклонении от заданных параметров висения с выхода блока 3 обработки телевизионной информации.
По поступившей в блок 9 формирования команд управления информации в этом блоке вырабатываются управляющие сигналы для автопилота 10.
Увеличение точности и безопасности достигается за счет увеличения точности выдерживания заданных параметров висения при одновременной работе летчика и автопилота 10 и снижения нагрузки на летчика.
Введение в состав системы дополнительных телевизионных камер 11, 12 (одной или нескольких) позволяет дополнительно увеличить точность и безопасность пилотирования за счет увеличения надежности работы системы (резервирования), улучшения обзора, с возможности обзора места работ с иной точки, улучшения работы системы в условиях плохой видимости при использовании телевизионных камер разного типа (низкоуровневых, тепловизионных и т.п.), улучшения точности висения за счет использования телевизионных камер с различными полями зрения.
Для осуществления коррекции местоположения вертолета с земли, что важно при выполнении монтажных и спасательных работ, состав системы дополняется блоком 13 передачи данных, вертолетной радиотехнической системой 14 и наземным пультом управления (на схеме не показан), которые дистанционно (например, по радиолинии или по кабелю) связаны между собой. Управляющий выход блока 13 передачи данных связан с управляющим входом блока 3 обработки телевизионной информации, на который поступают управляющие сигналы с пульта управления. Управление вертолетом с наземного пульта аналогично управлению с бортового пульта 6.
Качество и безопасность управления с земли могут быть улучшены за счет обеспечения на земле оператора телевизионной информацией, наблюдаемой летчиком. Для этого с соответствующего выхода блока 3 обработки телевизионной информации подается сигнал на блок 13 передачи данных, с которого он по линии дистанционной связи передается на наземный пульт управления. Эта линия связи может использоваться и для речевого обмена информацией между летчиком и наземным оператором.
Система может быть реализована в современных цифровых бортовых вертолетных комплексах. Система может быть выполнена как автономная, при этом возможно конструктивное объединение блоков.
Функции телевизионной камеры 1 могут выполнять обзорные средства любого типа: работающие в видимом диапазоне, ночные (низкоуровневые), инфрокрасные (тепловизионные), локационные и т.п.. Важно, чтобы их быстродействие позволяло получать информацию, пригодную для управления. Может быть использована и вертолетная штатная обзорная система.
Индикатор 2 может быть любого типа (на кинескопе, жидкокристаллический). Важно, чтобы его технические характеристики соответствовали условиям эксплуатации на вертолете и изображение было приемлемо для летчика. В качестве индикатора 2 может использоваться и штатная вертолетная система отображения информации. Телевизионная камера и индикатор могут быть цифровыми.
В качестве блока 3 обработки телевизионной информации может использоваться цифровой вычислитель, функциональные возможности которого близки к современному персональному компьютеру.
В качестве датчика 4 крена и тангажа может использоваться самолетная гировертикаль, в том числе и штатная, установленная на борту вертолета.
Пульт 6 управления может быть выполнен как автономное устройство и/или его органы управления могут быть размещены непосредстенно на элементах конструкции вертолета в местах, удобных для использования их летчиком, в том числе на рычагах упраления вертолетом.
В качестве высотомера может использоваться, например, радиовысотомер или лазерный высотомер, в том числе и штатные вертолетные.
В качестве датчиков 7,8 параметров движения вертолета могут использоваться акселерометры, спутниковые навигационные системы, инерциальные системы, доплеровские системы и т.п., в том числе и штатные системы вертолета.
Блок 9 формирования команд управления может быть аналоговым или цифровым. Его функции можно реализовать в штатной вертолетной системе управления или в блоке формирования телевизионной информации.
Блок 13 передачи данных может быть реализован на основе радиолинии, позволяющей передавать как командную (управляющую) информацию, так и телевизионную. Может использоваться как прямой телевизионный канал, так и сотовые спутниковые средства связи. Может использоваться и штатная вертолетная радиоаппаратура. Учитывая специфику вертолета, в простейшем случае используются кабельные средства для передачи информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ВЕРТОЛЕТА | 1999 |
|
RU2150137C1 |
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС УПРАВЛЕНИЯ ДИСТАНЦИОННО ПИЛОТИРУЕМЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2250486C2 |
| ГРАВИИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС | 1998 |
|
RU2150132C1 |
| ВЕРТОЛЕТ ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ | 2003 |
|
RU2265555C2 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| Командно-пилотажный индикатор вертолета | 2021 |
|
RU2778955C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2013 |
|
RU2539708C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ЛЕТЧИКОВ ПИЛОТИРОВАНИЮ УДАРНОГО ВЕРТОЛЕТА И ПРИМЕНЕНИЮ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ | 2008 |
|
RU2367026C1 |
Группа изобретений относится к технике управления положением вертолета в режиме малых скоростей и висении над заданной точкой. Согласно способу осуществляют телевизионный обзор поверхности под вертолетом, определяют текущую высоту висения и/или текущее отклонение от заданной высоты и индицируют полученное изображение поверхности. Далее определяют угловые данные по крену и тангажу вертолета, на индицированном изображении поверхности под вертолетом формируют по ним изображение вертикальных в земной системе координат проекций продольной и поперечной осей вертолета, проходящих через центр тяжести вертолета, или параллельных им осей, направленных через элементы конструкции вертолета, а также наносят изображение высотной шкалы с символом заданной высоты висения и индексом, указывающим текущую высоту висения и/или текущее отклонение от заданной высоты. В процессе управления добиваются совмещения точки пересечения проекций осей с изображением заданного места висения и размещения индекса на высотной шкале у символа заданной высоты висения. Система управления содержит пульт управления, датчик крена и тангажа, датчик высоты и/или отклонения от заданной высоты, телевизионную камеру, индикатор, блок обработки телевизионной информации. Технический результат - увеличение точности управления положением вертолета в режиме висения за счет более наглядного и полного информационного обеспечения летчика как при ручном, так и при автоматическом управлении вертолетом. 2 н. и 9 з.п. ф-лы, 1 ил.
| Устройство для предупреждения приема поездов на пути, на которые производится прием как четных, так и нечетных поездов | 1924 |
|
SU6249A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170409C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ | 2002 |
|
RU2212632C1 |
| ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
SU1797383A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ВЕРТОЛЕТА | 1999 |
|
RU2150137C1 |
| Самодвижущаяся зимняя повозка | 1924 |
|
SU8813A1 |
| US 4029271, 14.06.1977. | |||

