Изобретение относится к области управления наведением летательных аппаратов (ЛА) и может быть использовано для оперативного управления временем прилета спускаемого аэробаллистического ЛА в заданную точку земной поверхности (точку цели) путем изменения формы траектории спуска ЛА на земную поверхность с заданной высоты, при этом переход на более пологие траектории спуска ведет к увеличению времени прилета ЛА в точку прицеливания, а переход на более крутые траектории спуска ведет к соответствующему уменьшению времени прилета ЛА.
Известен способ формирования траекторий спускаемого аэробаллистического летательного аппарата в заданную точку земной поверхности (точку цели) - навесных, настильных, подлетных с заданного направления и др. (см.[1], [2]), заключающийся в том, что задают требуемое направление вектора конечной скорости ЛА в точке цели, осуществляют построение целевой системы координат, связанной с заданным направлением конечной скорости, формируют программы требуемых ускорений ЛА в проекциях на картинную плоскость наведения, нормальную к направлению конечной скорости, находят закон терминального управления спускаемым ЛА из динамических уравнений движения ЛА с определением его действительных параметров движения с помощью бортовой навигационно-измерительной системы.
Недостаток известного способа заключается в том, что формирование различных траекторий спускаемого аппарата осуществляется без учета возможных вариаций времени прилета ЛА в точку прицеливания, которое может изменяться в значительных пределах как за счет атмосферных и иных возмущений, воздействующих на спускаемый аппарат на предыдущих этапах полета, так и вследствие изменения самих траекторий спуска, формируемых в рамках известного способа управления.
Задачей изобретения является обеспечение возможности управления временем прилета аэробаллистического ЛА в точку цели. В частном случае управление временем будет заключаться в поддержании заданного значения времени прилета ЛА в условиях воздействия возмущающих факторов, оказывающих влияние на время полета ЛА по траектории спуска (случайные вариации параметров атмосферы, отклонения аэробаллистических характеристик ЛА от их номинальных значений и др.). В более общем случае управление временем будет заключаться в оперативном изменении заданного времени прилета ЛА в точку цели непосредственно в ходе полета.
Необходимость управления временем прилета ЛА в точку цели существует во многих ситуациях применения аэробаллистических ЛА. В частности, при полете группы однотипных аэробаллистических ЛА, направляемых в одну или близко расположенные точки цели, возникает необходимость точной синхронизации моментов прилета ЛА в общую или индивидуальные точки цели (см. [1], с.435-439). При управлении пилотируемыми спускаемыми аппаратами типа «Шаттл» или «Буран» необходимость оперативного изменения времени прилета ЛА в точку посадки может быть вызвана метеорологическими факторами.
На фиг.1 показаны плоские траектории спуска ЛА из начальной точки О в точку цели Ц, формируемые в рамках известного способа управления полетом ЛА. Пунктиром показана номинальная (расчетная) траектория спуска, которой соответствует заданная конечная скорость ЛА в точке Ц, обозначенная как  , и расчетное время прилета ЛА в точку Ц, которое обозначим как
, и расчетное время прилета ЛА в точку Ц, которое обозначим как  . Здесь же показаны оси целевой системы координат Хц и Yц, связанные с вектором заданной конечной скорости, при этом ось Хц направлена по вектору
. Здесь же показаны оси целевой системы координат Хц и Yц, связанные с вектором заданной конечной скорости, при этом ось Хц направлена по вектору  , а ось Yц ей перпендикулярна. Угол
, а ось Yц ей перпендикулярна. Угол  (называемый в баллистике углом бросания) определяет направление вектора конечной скорости
(называемый в баллистике углом бросания) определяет направление вектора конечной скорости  в точке цели и тем самым форму траектории ЛА на предыдущем этапе полета.
в точке цели и тем самым форму траектории ЛА на предыдущем этапе полета.
На фиг.1 показаны два других угла  и
и  , задание которых определяет две другие траектории спуска, отмеченные цифрами 1 и 2.
, задание которых определяет две другие траектории спуска, отмеченные цифрами 1 и 2.
Таким образом, угол бросания θц является в известном способе параметром управления формой траектории спуска, выбранное значение которого фиксируется в алгоритмах наведения ЛА в точку цели или согласно способу управления, описанному в [2], изменяется в алгоритмах наведения по заданной программе.
Изменение угла θц по сравнению с его номинальным расчетным значением и соответствующее этому изменение формы траектории спуска приводят к изменению времени полета ЛА от точки О до точки прицеливания Ц. Это обстоятельство положено в основу заявляемого способа управления временем прилета ЛА в точку прицеливания.
Обозначим через  и
и  время прилета ЛА в точку Ц при движении по траекториям, отмеченным на фиг.1 цифрами 1 и 2. При движении по первой траектории, более пологой, время прилета в точку Ц больше, чем при движении по номинальной расчетной траектории,
время прилета ЛА в точку Ц при движении по траекториям, отмеченным на фиг.1 цифрами 1 и 2. При движении по первой траектории, более пологой, время прилета в точку Ц больше, чем при движении по номинальной расчетной траектории,  . При движении по второй траектории, более крутой, время прилета в точку Ц меньше, чем при движении по номинальной расчетной траектории,
. При движении по второй траектории, более крутой, время прилета в точку Ц меньше, чем при движении по номинальной расчетной траектории,  . Из изложенного следует, что выбором нужного значения угла θц с последующей фиксацией его значения в алгоритмах наведения может быть обеспечено требуемое значение времени прилета ЛА в точку цели.
. Из изложенного следует, что выбором нужного значения угла θц с последующей фиксацией его значения в алгоритмах наведения может быть обеспечено требуемое значение времени прилета ЛА в точку цели.
Таким образом, в заявляемом способе угол θц является параметром управления временем прилета ЛА в точку цели.
Между значениями угла θц и значениями времени Тц прилета ЛА в точку цели при движении из начальной точки О существует однозначная функциональная зависимость, точный вид которой может быть установлен математическим моделированием управляемого движения ЛА по алгоритмам наведения в соответствии со способом управления, изложенным в [1].
В качестве примера на фиг.2 представлена кривая, характеризующая вид такой зависимости. Данная кривая получена моделированием движения гипотетического высокоскоростного аэробаллистического ЛА с характеристиками, приведенными в [1], с.419, при спуске в заданную точку земной поверхности с начальной высоты 30 км. В окрестности номинального значения угла бросания (в данном примере  ,
,  ) расчетная кривая может быть аппроксимирована квадратичной зависимостью вида
) расчетная кривая может быть аппроксимирована квадратичной зависимостью вида

где  отклонение времени прилета ЛА в точку Ц, вызванное изменением угла бросания
отклонение времени прилета ЛА в точку Ц, вызванное изменением угла бросания  . Значения коэффициентов C1 и С2 зависимости (1) определяются для номинальных условий полета ЛА перед его пуском и вводятся в составе данных полетного задания в бортовую аппаратуру управления. Зависимость (1) или подобная ей более точная зависимость может быть использована в бортовых алгоритмах управления для расчета требуемого изменения угла θц в алгоритмах управления, компенсирующего отклонение времени прилета ΔТц, чем и будет обеспечено управляемое изменение времени прилета ЛА в точку цели.
. Значения коэффициентов C1 и С2 зависимости (1) определяются для номинальных условий полета ЛА перед его пуском и вводятся в составе данных полетного задания в бортовую аппаратуру управления. Зависимость (1) или подобная ей более точная зависимость может быть использована в бортовых алгоритмах управления для расчета требуемого изменения угла θц в алгоритмах управления, компенсирующего отклонение времени прилета ΔТц, чем и будет обеспечено управляемое изменение времени прилета ЛА в точку цели.
В соответствии с изложенным заявляемый способ управления временем прилета ЛА в заданную точку цели сводится к следующему.
1. В процессе полета ЛА на некоторой заданной высоте над земной поверхностью (точка О на фиг.1) осуществляют прогноз ожидаемого времени полета ЛА от заданной высоты до точки цели по полным или упрощенным уравнениям движения ЛА с помощью бортового вычислителя.
2. Определяют отклонение ожидаемого времени прилета ЛА в точку
цели от его расчетного номинального значения , где  - расчетное значение времени прилета ЛА, вводимое в память бортовой системы управления ЛА перед его пуском, и Тц - время прилета, найденное путем прогноза.
- расчетное значение времени прилета ЛА, вводимое в память бортовой системы управления ЛА перед его пуском, и Тц - время прилета, найденное путем прогноза.
3. С помощью зависимости вида (1) или другой, более точной зависимости, находят требуемое изменение угла бросания Δθц, соответствующее отклонению времени ΔТц, после чего определяют измененное значение угла бросания 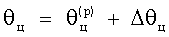 .
.
4. Найденное измененное значение угла θц фиксируют в бортовых алгоритмах управления полетом ЛА, чем достигается изменение заданного направления конечной скорости ЛА в точке цели, влекущее соответствующее изменение формы траектории ЛА при подлете к точке цели и сведение прогнозируемого отклонения времени прилета ЛА к нулю. После фиксации значения угла θц в бортовых алгоритмах управление полетом ЛА осуществляется в соответствии с известным способом.
В случаях, когда необходимо осуществить оперативное программное изменение времени прилета непосредственно в процессе спуска ЛА (например, вследствие неблагоприятных метеоусловий в точке посадки пилотируемого ЛА), требуемую вариацию времени прилета определяют непосредственно по формуле , где - расчетное значение времени прилета, хранящееся в памяти бортовой системы управления, Тц - измененное время прилета. После этого реализация заявляемого способа управления временем сводится к выполнению действий, описанных выше в пп.3, 4.
Источники информации
1. Системы управления летательными аппаратами: Учебник для вузов / Разоренов Г.Н., Бахрамов Э.А., Титов Ю.Ф. М.: Машиностроение, 2003 г. (с.405-420).
2. Патент №2296940, приоритет от 11 ноября 2005 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ТРАЕКТОРИЙ СПУСКАЕМОГО АЭРОБАЛЛИСТИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА ТРЕБУЕМЫХ КОНФИГУРАЦИЙ ПРИ НАВЕДЕНИИ В ЗАДАННУЮ ТОЧКУ ЗЕМНОЙ ПОВЕРХНОСТИ | 2005 |
|
RU2296940C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АЭРОБАЛЛИСТИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПО ЗАДАННОЙ ПРОСТРАНСТВЕННОЙ ТРАЕКТОРИИ | 2013 |
|
RU2571567C2 |
| ГИПЕРЗВУКОВОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И СПОСОБ РЕАЛИЗАЦИИ ЕГО ПОЛЕТА | 2009 |
|
RU2393978C1 |
| УПРАВЛЯЕМАЯ ПАРАПЛАННАЯ СИСТЕМА | 2008 |
|
RU2378160C1 |
| СПОСОБ БОРТОВОГО КОНТРОЛЯ ДЛЯ АВАРИЙНОГО ПРЕКРАЩЕНИЯ ПОЛЕТА РАКЕТЫ | 2011 |
|
RU2476357C2 |
| СПОСОБ ФОРМИРОВАНИЯ МАНЕВРОВ ПРОИЗВОЛЬНОЙ КОНФИГУРАЦИИ НА КОНЕЧНОМ УЧАСТКЕ ТРАЕКТОРИИ ПЛАНИРУЮЩЕГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2554568C2 |
| СПОСОБ КОНЕЧНОГО ПРИВЕДЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В ПРОДОЛЬНОЙ ПЛОСКОСТИ НА ОСНОВЕ КВАЗИОПТИМАЛЬНОГО ЗАКОНА НАВЕДЕНИЯ | 2020 |
|
RU2737840C2 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2012 |
|
RU2525650C2 |
| Способ восстановления параметров движения летательного аппарата | 2016 |
|
RU2620786C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2003 |
|
RU2229671C1 |

Изобретение относится к области управления наведением летательных аппаратов (ЛА) и может быть использовано для обеспечения заданного времени прилета спускаемого аэробаллистического ЛА в заданную точку земной поверхности. Способ включает формирование траектории спуска путем задания требуемого направления вектора конечной скорости ЛА в заданной точке земной поверхности. При этом прогноз ожидаемого времени прилета ЛА осуществляют с помощью бортового вычислителя. Определяют отклонение ожидаемого времени прилета ЛА от его расчетного номинального значения. По найденному отклонению времени прилета корректируют требуемое направление конечной скорости ЛА в заданной точке земной поверхности из условия сведения прогнозируемого отклонения времени прилета к нулю. Технический результат заключается в обеспечении возможности управления временем прилета ЛА в заданную точку земной поверхности в условиях воздействия возмущающих факторов. 2 ил.
Способ управления временем прилета спускаемого аэробаллистического летательного аппарата (ЛА) в заданную точку земной поверхности, включающий формирование траектории спуска путем задания требуемого направления вектора конечной скорости ЛА в точке цели, отличающийся тем, что осуществляют прогноз ожидаемого времени прилета ЛА от заданной высоты над земной поверхностью до заданной точки земной поверхности с помощью бортового вычислителя, определяют отклонение ожидаемого времени прилета ЛА от его расчетного номинального значения и по найденному отклонению времени прилета корректируют требуемое направление конечной скорости ЛА в заданной точке земной поверхности из условия сведения прогнозируемого отклонения времени прилета ЛА к нулю.
| СПОСОБ ФОРМИРОВАНИЯ ТРАЕКТОРИЙ СПУСКАЕМОГО АЭРОБАЛЛИСТИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА ТРЕБУЕМЫХ КОНФИГУРАЦИЙ ПРИ НАВЕДЕНИИ В ЗАДАННУЮ ТОЧКУ ЗЕМНОЙ ПОВЕРХНОСТИ | 2005 |
|
RU2296940C1 |
| РАЗОРЕНОВ Г.Н | |||
| и др | |||
| Системы управления летательными аппаратами: Учебник для вузов | |||
| - М.: «Машиностроение», 2003 | |||
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ ПО КУРСУ В УГЛОМЕРНОЙ ДВУХПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2004 |
|
RU2256870C1 |
| СПОСОБ ЗАДАНИЯ МАРШРУТА ДВИЖЕНИЯ ПЛАНИРУЮЩЕГО ЛЕТАТЕЛЬНОГО АППАРАТА С ТЕРМИНАЛЬНЫМ УПРАВЛЕНИЕМ | 2003 |
|
RU2251664C1 |

