Область техники, к которой относится изобретение
Изобретение относится к области определения местоположения путем сопоставления в одной системе координат двух и более найденных расстояний, в частности, к определению местоположений объектов.
Уровень техники
Известна система для определения местоположения мобильного устройства (US9232357B2, опубл. 30.04.2015). Известная система включает в себя сервер, приспособленный для вычисления положения мобильного устройства в заранее заданной области; ведущий анкер, включающий в себя: первую возможность радиосвязи, вторую возможность радиосвязи и главный процессор, предназначенный для отправки данных, относящихся к пакетам запроса сканирования, через вторую возможность радиосвязи на сервер, причем данные отправляются вместе с временной меткой, отражающей время приема пакетов запроса сканирования; и множество ведомых анкеров, каждый из которых включает в себя: первую возможность радиосвязи, ведомый процессор, приспособленный для отправки данных, относящихся к пакетам запроса сканирования, на сервер вместе с отметкой времени; причем сервер приспособлен для вычисления соответствующего расстояния каждого маяка от мобильного устройства.
Однако в известном решении используется подход к определению местоположения мобильного устройства, который ограничивает количество объектов, у которых определяется местоположение, за единицу времени.
Известны способы и системы планирования передачи сигналов локализации и работы устройства определения своего местоположения (US11259154B2, опубл. 22.02.2022). В известном решении передают сигналы локализации с метками времени от анкеров в соответствии с одним или несколькими расписаниями передачи. Расписания передачи могут генерироваться и обновляться для достижения требуемой производительности позиционирования. Например, один или несколько анкеров могут передавать сигналы локализации с отличной скоростью по сравнению с другими анкерами, порядок передачи может быть изменен, и сигналы могут частично перекрываться. Кроме того, для одновременной передачи двух сигналов локализации без помех могут использоваться разные параметры передачи. Устройство определения своего местоположения способно принимать сигналы локализации и определять свое положение. Устройство определения своего местоположения может иметь конфигурируемый приемник, который может выбирать для приема один из множества доступных сигналов локализации. Устройства определения своего местоположения могут иметь пару приемников, способных одновременно принимать два сигнала локализации. Мостовой анкер может быть предусмотрен для того, чтобы устройство определения своего местоположения могло бесшовно переходить между двумя системами локализации.
Однако в известном решении используется внешний блок синхронизации, что усложняет реализацию определения местоположения метки, любые ошибки блока синхронизации приводят к ошибкам определения местоположения всех меток.
Известна выбранная в качестве прототипа система определения местоположения и отслеживания (US6275705B1, опубл. 14.08.2001). Известное решение относится к способу определения положения мобильного радиочастотного приемопередатчика в системе связи. Сеть содержит, по меньшей мере, две несинхронизированные базовые станции, предназначенные для передачи/приема сигналов, по меньшей мере, на один мобильный радиочастотный приемопередатчик; опорный приемник, расположенный на известном расстоянии от базовых станций и включающий в себя средства измерения времени прихода сигналов, передаваемых от базовых станций; средство определения для использования известных расстояний и измеренных времен для определения относительных временных сдвигов передач от каждой базовой станции; и средство определения местоположения для использования определенных относительных временных сдвигов для вычисления положения мобильного приемопередатчика в зоне сети с использованием методов гиперболического позиционирования.
Однако в известном решении необходим эталонный приемник для обеспечения корректировки сигналов базовых станций, любые ошибки эталонного приемника приводят к ошибкам определения местоположения всех меток.
Раскрытие сущности
В одном аспекте предложен способ определения местоположения объекта, содержащий этапы, на которых:
- формируют пары анкеров, выполненных на основе приемопередатчиков с таймерами, для обмена сообщениями согласно заранее заданному расписанию;
- калибруют каждую пару анкеров для определения задержек в анкерах пары с помощью эталонной метки;
- упомянутые пары анкеров обмениваются по меньшей мере двумя сообщениями;
- прикрепленная к объекту по меньшей мере одна метка последовательно принимает сообщения, передаваемые последовательно по меньшей мере тремя парами анкеров, регистрирует время приема этих сообщений, расшифровывает служебную информацию, содержащуюся в этих сообщениях, и определяет длительность времени между моментами времени приема сообщений от пар анкеров с учетом проведенной калибровки;
- прикрепленная к объекту по меньшей мере одна метка определяет свое местоположение на основании известного местоположения анкеров и длительности времени между моментами времени приема сообщений от пар анкеров.
В одном из вариантов предложен способ, в котором при обмене сообщениями анкеры согласуют свои внутренние часы друг с другом.
В одном из вариантов предложен способ, в котором метка определяет степень отраженности сигнала и отбрасывает переотраженные сигналы анкеров.
В одном из вариантов предложен способ, в котором при потере сигнала от анкеров метка определяет свое местоположение как последнее достоверно известное или определяет свое местоположение с помощью блока инерциальных измерений.
В одном из вариантов предложен способ, в котором метка содержит магнитометр для определения ориентации связанной системы координат (ССК) объекта, к которому прикреплена метка.
В одном из вариантов предложен способ, в котором к объекту прикрепляют две метки с известным относительным расположением и по взаимному положению этих меток определяют местоположение объекта и ориентацию ССК объекта.
В одном из вариантов предложен способ, в котором метка и по меньшей мере один из анкеров содержат баровысотометр для вычисления меткой своей высоты, при этом показания баровысотометра анкера добавляют в сообщения, которыми анкера обмениваются между собой, и которые получает метка, на основании этих данных метка определяет свою высоту.
В одном из вариантов предложен способ, в котором к объекту прикрепляют три метки для оценки пространственного положения ССК объекта или к объекту прикрепляют по меньшей мере две метки и баровысотометр для оценки пространственного положения ССК объекта.
В одном из вариантов предложен способ, в котором метка в определённый момент времени сообщает о своем местоположении, выходя в эфир или через интерфейс связи с коммуникационным или робототехническим устройством.
В одном из дополнительных аспектов предложена система определения местоположения объекта, содержащая:
- множество анкеров, разделенных на пары, выполненных на основе приемопередатчиков с таймерами и с возможностью обмена сообщениями между собой согласно заранее заданному расписанию;
- по меньшей мере одну прикрепленную к объекту метку, выполненную с возможностью последовательного приема сообщений, которыми обмениваются пары анкеров, регистрации времени приема этих сообщений, расшифровки служебной информации, содержащейся в этих сообщениях, и определения длительность времени между моментами времени приема сообщений от пар анкеров с учетом заранее проведенной калибровки пар анкеров;
причем каждая метка выполнена с возможностью определения своего местоположения на основании длительности времени между моментами времени приема сообщений и известных координат анкеров.
Таким образом, в дополнительных аспектах раскрыто, что при обмене сообщениями анкеры согласуют свои внутренние часы друг с другом; метка определяет степень отраженности сигнала и отбрасывает переотраженные сигналы анкеров; при потере сигнала от анкеров метка определяет свое местоположение как последнее достоверно известное или определяет свое местоположение с помощью блока инерциальных измерений; метка содержит магнитометр для определения ориентации связанной системы координат (ССК) объекта, к которому прикреплена метка; к объекту прикрепляют две метки с известным относительным расположением и по взаимному положению этих меток определяют местоположение объекта и ориентацию ССК объекта; метка и по меньшей мере один из анкеров содержат баровысотометр для вычисления меткой своей высоты, при этом показания баровысотометра анкера добавляют в сообщения, которыми анкера обмениваются между собой, и которые получает метка, на основании этих данных метка определяет свою высоту; к объекту прикрепляют три метки для оценки пространственного положения ССК объекта или к объекту прикрепляют по меньшей мере две метки и баровысотометр для оценки пространственного положения ССК объекта; метка в определённый момент времени сообщает о своем местоположении, выходя в эфир или через интерфейс связи с коммуникационным или робототехническим устройством.
Основной задачей, решаемой заявленным изобретением, является создание системы, в которой любое количество меток может точно определять свое местоположение.
Сущность изобретения заключается в том, что анкера, выполненные на основе приемопередатчиков с таймерами, засекающие время прихода и отправления сообщений, попарно обмениваются сообщениями друг с другом, эти сообщения принимаются метками, выполненными на основе приемопередатчиков с таймерами, засекающими время прихода и отправления сообщений, которые на основании времени приема сообщений от анкеров определяют разность расстояний от метки до этой пары анкеров. В следующий временной период метки принимают сообщения, которыми обменивается другая пара анкеров и таким образом определяют разность расстояний от метки до другой пары анкеров. На основании этих данных и данных о местоположении анкеров метки сами вычисляют свое местоположение в пространстве.
Технический результат, достигаемый решением, заключается в возможности точного и быстрого обнаружения своего местоположения неограниченным количеством меток.
Краткое описание чертежей
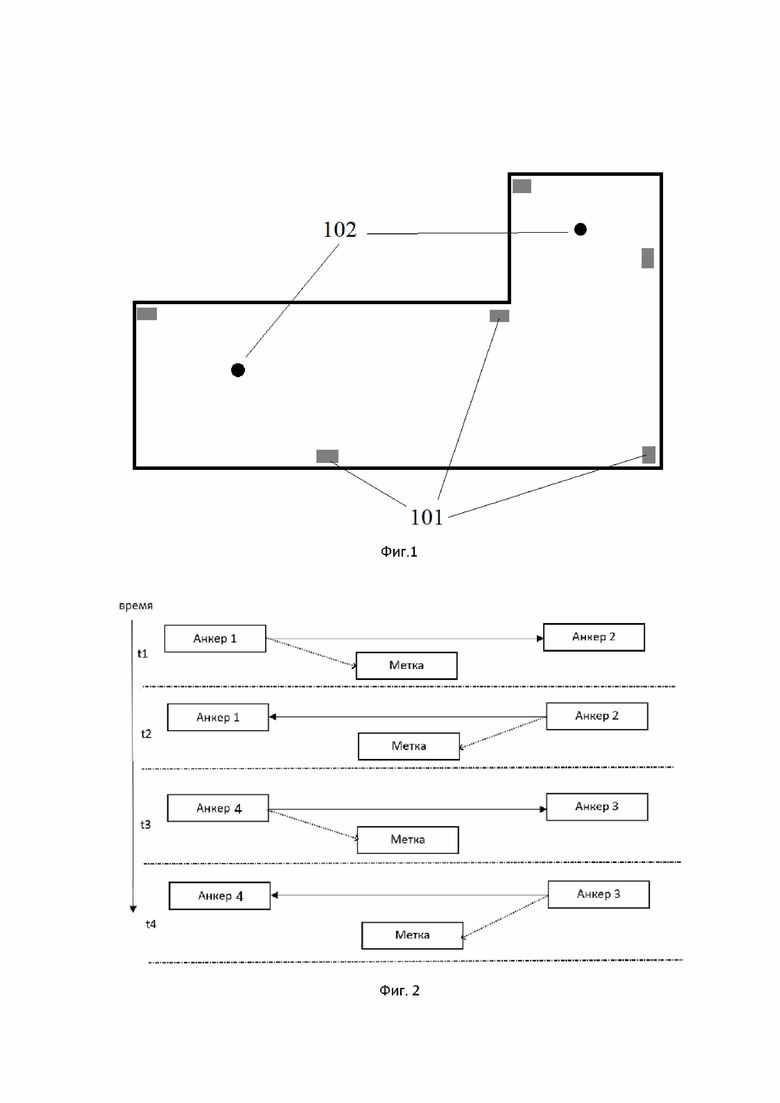
Фиг.1 - Схема размещения анкеров.
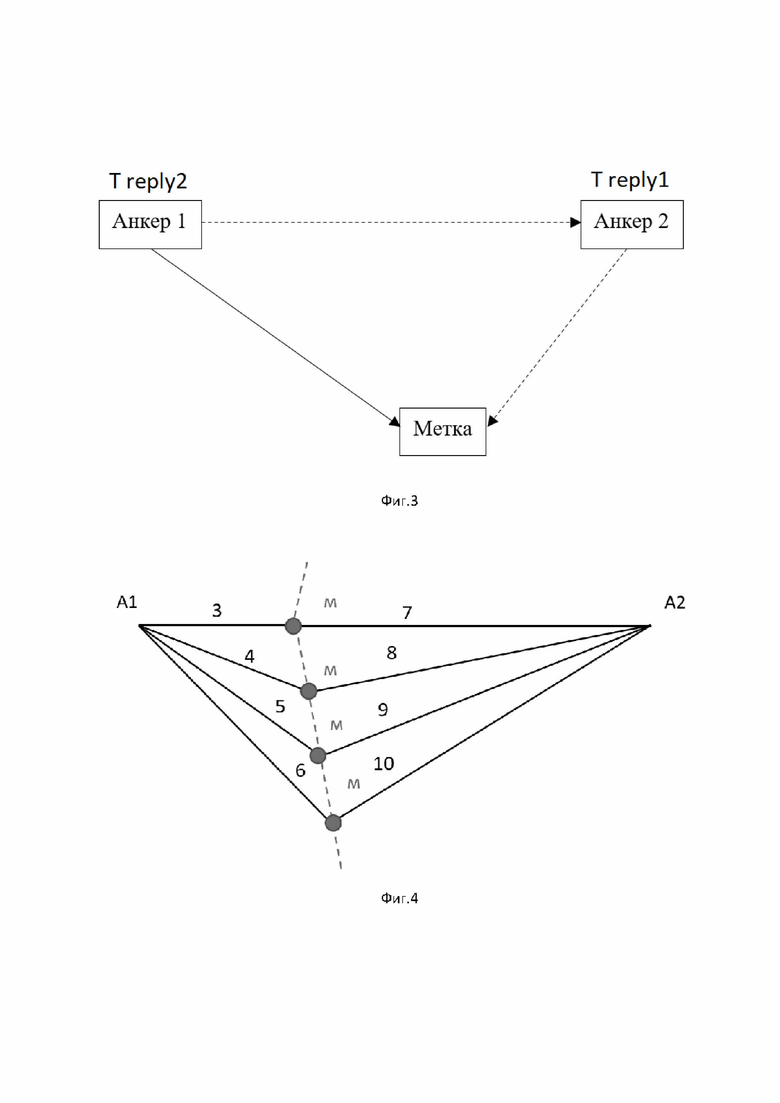
Фиг.2 - Временная диаграмма обмена сообщениями между анкерами.
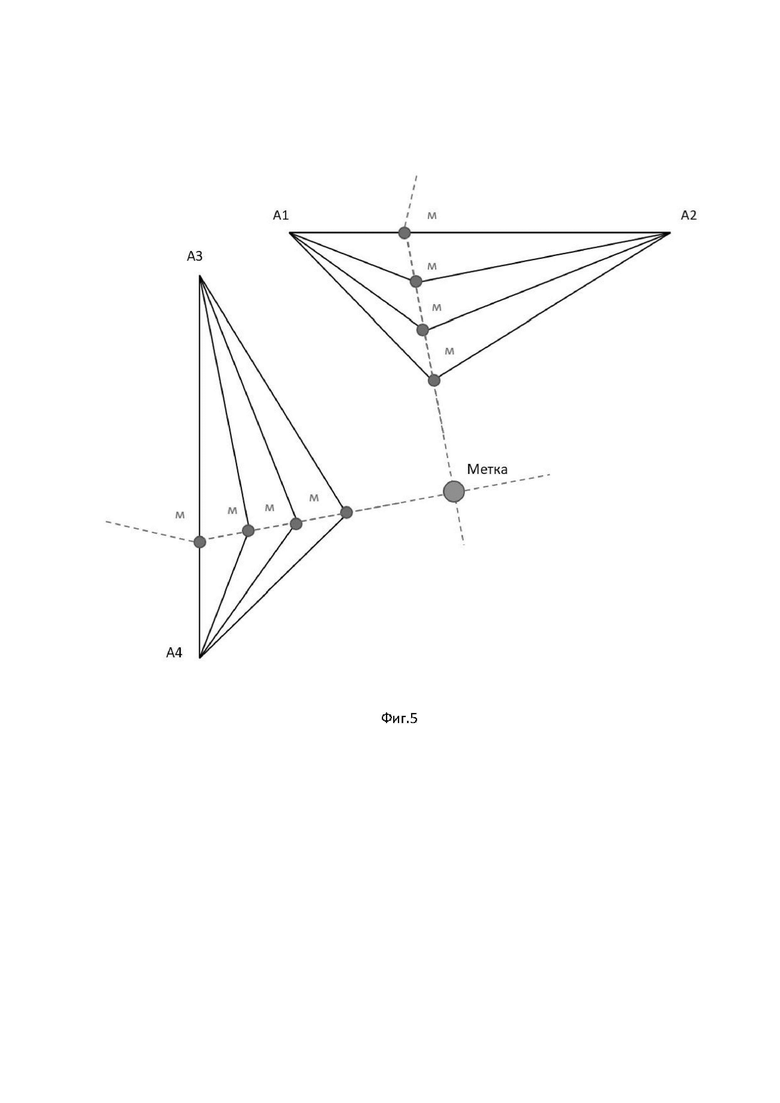
Фиг.3 - Распространение сигнала между анкерами и меткой.
Фиг.4 - Возможные местоположения метки после приема сообщений от одной пары анкеров.
Фиг.5 - Определение местоположения метки.
Осуществление изобретения
Схема пространства с анкерами и метками показана на фиг.1, на которой:
101 – анкеры,
102 – метки.
Схема на фиг.1 является примерной, количество анкеров и меток может быть разным, что зависит от размера и формы области, в которой осуществляется определение местоположения. Размещение анкеров должно быть таким, чтобы в любом месте пространства любая метка могла принимать сигналы от по меньшей мере трех пар анкеров (на практике от по меньшей мере четырех). При определении места на плоскости достаточно двух пар анкеров.
Возможен вариант определения высоты меткой посредством баровысотомера. В этом случае, для определения места достаточно двух пар анкеров. Но система должна информировать метки об изменениях атмосферного давления на какой-либо фиксированной точке.
Анкер – это приемопередатчик с таймером, засекающий время прихода и отправления сообщений, устанавливаемый в точке с известными координатами, относительно которого определяется местоположения меток. В состав анкера кроме приемопередатчика входит микроконтроллер, микросхема преобразователя питания, интерфейс связи, барометрический датчик, светодиод. Некоторые из вышеперечисленных компонентов анкеров могут быть опциональными, что зависит от особенностей условий эксплуатации и решаемых задач.
Метка – это приемопередатчик с таймером, засекающим время прихода и отправления сообщений, местоположение которого необходимо определить. В состав метки кроме приемопередатчика входит микроконтроллер, аккумулятор, блок инерциальных и магнитных измерений, микросхема беспроводного заряда, катушка заряда, преобразователи питания, кнопка включения/выключения, светодиод, RFID метка, барометрический датчик, пьезодинамики, интерфейс связи и экран ввода-вывода информации. Некоторые из вышеперечисленных компонентов метки могут быть опциональными, что зависит от особенностей условий эксплуатации и решаемых задач.
Предложенная система определения местоположения объекта состоит из необходимого и достаточного количества анкеров и как минимум одной метки, привязанной к объекту, местоположение которого определяется. Анкеры и метки находятся в функциональной связи друг с другом, обеспечивающей возможность меткам определять свое местоположение.
На фиг. 2 и 3 показаны временная диаграмма и распространение сигнала в системе, состоящей из двух Анкеров и одной Метки. Реализован следующий алгоритм:
. В начальный момент времени Анкер 1 передает сообщение POLL.
. Анкер 2, принимает это сообщение, обрабатывает его и через фиксированное время после приема Treply1 передает ответное сообщение POLL_ASK.
. Анкер 1 принимает это сообщение, обрабатывает его и через фиксированное время после приема Treply2 передает ответное сообщение RANGE.
. Метка последовательно принимает сообщения POLL, POLL_ASK и RANGE, регистрирует время приема этих сообщений соответственно t1, t2 и t3 и расшифровывает служебную информацию Treply1 и Treply2 содержащуюся в этих сообщениях.
. Метка вычисляет разницу расстояний dif между собой и Анкерами согласно выражениям (1)-(3):

где c, d — калибровочные коэффициенты, dtA1 – разница между моментами времени приема сообщений POLL_ASK и POLL с поправкой на Treply1, dtA2 – разница между моментами времени приема сообщений RANGE и POLL_ASK с поправкой на Treply2.
Возможен вариант, в котором анкеры обмениваются только двумя сообщениями, а не тремя, этого количества метке достаточно для определения разности расстояний от нее до анкеров.
Таким образом, Метке для вычисления разности расстояний от себя до Анкеров dif не требуется синхронизации с внешним источником, в отличие, например, от метода TDoA (Time Difference of Arrival - разница во времени прибытия) или от выбранной в качестве прототипа системы определения местоположения и отслеживания (US6275705B1, опубл. 14.08.2001). Возможные местоположения Метки, определенные по сигналам от одной пары Анкеров, показаны на фиг.4, где разница расстояний до Анкеров составляет 4 условные единицы. Возможные местоположения в целях упрощения показаны прямой линией, однако на практике эта линия не является прямой.
. Синхронизация счетчика внутреннего таймера Анкеров и меток происходит после приема сообщения POLL_ASK, согласно выражению вида:

где timer_tick — значение собственного таймера,
timer_tick_input — значение таймера Анкера 1,
coef = 0,1-1 — коэффициент.
Как правило коэффициент coef выбирается равным единице. Однако у всех анкеров скорость их таймеров немного отличаются. Для того, чтобы коррекция проходила плавно коэффициент делается меньше единицы.
7. По результатам трех измерений Метка определяет свое местоположение в пространстве. На фиг.5 показан частный пример такого определения. Конкретный математический аппарат для определения Меткой своего местоположения не описывается в данной заявке, так как решение подобных задач хорошо известно.
. Получив четыре измерения разницы расстояний между Меткой и четырьмя парами анкеров, можно найти четыре местоположения Метки, так как три анкера дают три пары и соответственно одно местоположение Метки, а четыре анкера дают четыре варианта сочетаний из трех пар Анкеров (А1-А2-А3, А1-А2-А4, А1-А3-А4, А2-А3-А4) и соответственно четыре местоположения Метки.
. Методом наименьших квадратов (или любым другим подходящим) определяют местоположение Метки как линейную функцию от времени:

где Vx, Vy, Vz – компоненты вектора скорости,
Х0 – предыдущее местоположение метки по координате x, Х1 – определяемое местоположение метки по координате x,
Y0 – предыдущее местоположение метки по координате Y, Y1 – определяемое местоположение метки по координате y.
Z0 – предыдущее местоположение метки по координате Z, Z1 – определяемое местоположение метки по координате z.
Таким образом, получаем непрерывную функцию от времени на измеряемом интервале. Наличие непрерывной функции от времени позволяет точнее смешивать координаты места, полученные посредством анкеров, и координаты, полученные от блока инерциальных и магнитных измерений. Кроме того, наличие траектории позволяет при оценке движения воспользоваться методами математической статистики. Очевидно, что у движущегося объекта матожидание места тоже постоянно и плавно движется.
Как вариант, методом наименьших квадратов определяют местоположение Метки как квадратичную функцию от времени:

где ax, ay, az – компоненты вектора ускорения.
Квадратичной аппроксимацией следует пользоваться в случае больших ускорений у объекта, местоположение которого определяется.
. В дальнейшем методами математической статистики получают матожидание и среднеквадратическое отклонение (СКО) этих величин.
. Отсеивают измерения, существенно отличающиеся от средних значений с одновременным повторением п. 9, 10. Здесь подойдет любой критерий: либо несколько измерений с наибольшим отклонением от матожидания, либо до получения заранее заданного СКО.
К преимуществам описанного способа определения местоположения относится следующее:
- неограниченное количество меток, определяющих свое местоположение;
- высокая точность по сравнению с методом ToF, сопоставимая точность по сравнению с методом TdoA;
высокая скорость определения местоположения без поддержки сервера;
вычисление СКО местоположения, что позволяет оценить достоверность местоположения. В случае если СКО выше порогового значения, измерения признаются некорректными и либо увеличивается количество измерений, либо уменьшается вес этих измерений и местоположение определяется с большим весом инерциальной системы навигации, либо измерения признаются некорректными и забраковываются;
высокая точность определения местоположения движущихся объектов;
появляется возможность определять точность анкеров: если при задействовании сообщений от одного анкера метки постоянно получают недостоверные результаты определения местоположения, они могут сообщить об этом серверу, а тот выключит анкер и вызовет оператора для починки анкера;
непрерывное определение местоположения.
При определении местоположения по методу ToF метка должна как минимум 4 раза определить расстояние до ближайших анкеров. Одно определение расстояния длится приблизительно t = 5 - 7 мс. Если обновлять данные хотя бы один раз в секунду, то количество меток в системе будет не более 1000 мс/4/t = 50 - 35 меток. Для быстродвижущихся транспортных средств обновление данных один раз в секунду может оказаться неприемлемым, тогда возможное количество меток станет еще меньше. Для увеличения точности определения места метки необходимо увеличивать количество измерений, т.е. чем меньше измерений - тем больше влияние ошибок в измерениях. Потому метод ToF в сравнении с предлагаемым менее точен и количество меток в одной соте ограничено пятьюдесятью.
При определении местоположения посредством системы определения местоположения и отслеживания (например, описанной в US6275705B1, опубл. 14.08.2001) теоретически достижима та же точность и то же количество меток, что и в предложенном способе, однако требуется оборудование, синхронизирующее работу системы до пикосекунд.
Высокая точность определения местоположения достижимая посредством предложенного способа объясняется тем, что одновременно измеряется расстояние до сотен точек (меток) в пространстве. За секунду любое количество меток определяет свое местоположение сотни раз, даже с учетом возможного перемещения меток в пространстве в течение этой секунды точность определения местоположения оказывается очень высокой.
В заявленном способе непрерывно и автономно возможно определение местоположения меток без поддержки системы инерциальной навигации (IMU) и сервера. Методом ToF тоже можно определять местоположение без поддержки сервера, но только через достаточно длительные промежутки времени. Это связано с тем, что если одна метка обменивается сообщениями с анкерами, то остальные метки должны находится в режиме молчания. Потому в методе ToF широко распространены методы считывания пути посредством системы инерциальной навигации с последующей компенсацией дрейфа нуля.
В методе TdoA имеет место высокая задержка определения местоположения, так как все вычисления ведутся на сервере, а не самими метками. Это связано с тем, что метка передает сигнал, а анкера его фиксируют и передают на сервер. Сервер обрабатывает, передает сигнал на анкера, те в свою очередь в определенный момент времени передадут сигналы меткам. Задержка может достигать в зависимости от реализации до 2 и более секунд.
Касательно работы анкеров
Анкера располагаются с шагом от 0,1 до 0,8 дальности действия радиоприемников в прямой видимости друг у друга, при этом анкера не должны перекрывать друг друга. Для определения высоты метки необходимо анкера располагать на разных высотах. При размещении анкеров стараются обеспечить максимальное радиопокрытие обслуживаемой области, при наличии слепых зон, например за какими-либо выступами, устанавливаются дополнительные анкера, чтобы обеспечить возможность точного определения местоположения метками.
Существенным этапом настройки системы является калибровка анкеров, которая осуществляется следующим образом:
Пара анкеров измеряют между собой расстояние по известному методу ToF, обмениваясь сообщениями POLL, POLL_ASK, RANGE и RANGE_REPORT.
Устройство, выполненное на основе метки, подключенное к компьютеру (калибратор) регистрирует и сохраняет параметры этого обмена.
Калибратор методом ToF последовательно измеряет и сохраняет расстояние от себя до анкеров.
Пункты 1-3 повторяют для разных пространственных комбинаций анкеров и меток.
Отбрасывают недостоверные решения.
Методом наименьших квадратов (или иным известным из уровня техники подходящим математическим методом) получают калибровочную зависимость для каждой пары анкеров. Калибровочная зависимость имеет вид, показанный в выражении (3).
Чтобы не мешать меткам определять их местоположение анкера должны выходить в эфир в строго определенное время. Время выхода в эфир соседних пар анкеров задается заранее и различается на 0,1 — 1,5 мс. Это на много порядков менее точная синхронизация, чем по методу TDoA, что сильно снижает требования к синхронизации и приводит к повышению точности определения местоположения метками в реальных условиях.
Количество анкеров в предложенной системе не ограничено, но ограничено количество каналов в единицу времени — плотность каналов. Максимальное количество каналов в секунду в одной «соте» с современным оборудованием — около 500. «Сота» — это совокупность анкеров, слышащих друг друга. Название «сота» является обозначением массива анкеров, но не несет тот же смысл, что и «сота» в сети сотовой связи. В одной соте одновременно может работать только одна пара анкеров или метка. Анкера (и пр. устройства) в системе могут работать одновременно только, если они находятся в разных сотах.
Для уверенного позиционирования метки, ей достаточно зарегистрировать обмен сообщениями по 10 — 20 каналам. Возможность регистрации около 500 каналов в одной соте позволяет достичь очень высокой точности определения местоположения метками.
Для уменьшения величины соты, и соответственно увеличения плотности каналов на единицу площади, можно уменьшить мощность приемопередатчиков анкеров и других устройств системы.
Для уверенного трехмерного позиционирования, анкера должны быть размещены на разной высоте. Если это невозможно, то используются метки с баровысотометром, для компенсации изменчивости давления в течение дня в один из анкеров также встраивают баровысотометр. Показания этого баровысотометра добавляют в сообщения, которыми анкера обмениваются между собой, их получает метка и на основании этих данных определяет свою высоту.
Касательно работы меток
Метки согласуют периоды своей работы с периодами работы всей системы согласно выражению (4). Поскольку метки работают от внутреннего источника энергии, то для увеличения времени их работы, они осуществляют прием сообщений только во время работы анкеров, расположенных рядом. Для этого сначала, при включении, в течении короткого времени (порядка 1 сек) ловятся все каналы (сигналы от всех анкеров). После определения местоположения определяются ближайшие пары анкеров, и метка принимает сообщения только от них. В другие моменты времени метки не тратят энергию на прием и обработку сообщений. Повторное сканирование всех каналов может осуществляться через заданный период времени, либо при выявлении ухудшения сигналов от выявленных ближайших анкеров.
Метки могут быть выполнены с возможностью завершать прием сообщений от анкеров, после того как они определили свое местоположение с достаточной надежностью и точностью.
В ходе работы метки она отбраковывает сообщения, полученные от пары анкеров, при выполнении неравенства:

где c2, d2 – коэффициенты, определяемые при калибровке данной пары анкеров;
const – коэффициент определяемый экспериментально, т.е. для различного оборудования, условий развертывания и эксплуатации системы он свой.
Работа фильтра (7) основана на том, что dtA1 и dtA2 в конечном итоге измеряют одно и тоже расстояние. Соответственно, dtA1 и dtA2 коррелированы между собой. Функция корреляции (линейная) устанавливается на этапе калибровки системы.
Вариант 1 осуществления
В одном варианте осуществления при потере сигнала от анкеров метка определяет свое местоположение как последнее достоверно известное.
Вариант 2 осуществления
В одном варианте осуществления при потере сигнала от анкеров метка определяет свое местоположение с помощью IMU.
Вариант 3 осуществления
В одном варианте осуществления определяется местоположение машины. Определение места машины имеет особенность: необходимо знать расположение связанной системы координат (ССК) этой машины. Для этого в метку встраивают магнитометр. Магнитометр определяет ориентацию ССК машины.
Вариант 4 осуществления
Предыдущий вариант осуществления имеет недостаток: вблизи массивных ферромагнитных масс или сильных токов, искажающих магнитное поле Земли, определение ССК будет иметь существенную погрешность. Для исправления этого недостатка на крыше машины располагают две Метки с известным относительным расположением и по взаимному положению этих Меток определяют как местоположение машины, так и ориентацию ССК машины.
Вариант 5 осуществления
В одном варианте осуществления Метка выполнена с баровысотомером. При этом давление дня замеряет один из Анкеров и передает в систему. Метка вычисляет текущую высоту с поправкой.
Вариант 6 осуществления
В одном из вариантов осуществления Объект выполнен с по меньшей мере с тремя Метками. Это позволяет оценивать пространственное положение ССК.
Вариант 7 осуществления
В одном из вариантов осуществления Объект выполнен с по меньшей мере с двумя Метками и баровысотомером. При этом давление дня замеряет один из Анкеров и передает в систему. Метка вычисляет текущую высоту с поправкой. Это позволяет оценивать пространственное положение ССК.
Вариант 8 осуществления
В одном из вариантов осуществления метка через интерфейс связи подключена к коммуникационному или робототехническому устройству и через этот интерфейс связи передает координаты места этому устройству.
Варианты осуществления не ограничиваются описанными здесь вариантами осуществления, специалисту в области техники на основе информации, изложенной в описании, и знаний уровня техники станут очевидны и другие варианты осуществления изобретения, не выходящие за пределы сущности и объема данного изобретения.
Элементы, упомянутые в единственном числе, не исключают множественности элементов, если отдельно не указано иное.
Под функциональной связью элементов следует понимать связь, обеспечивающую корректное взаимодействие этих элементов друг с другом и реализацию той или иной функциональности элементов. Частными примерами функциональной связи может быть связь с возможностью обмена информацией, связь с возможностью передачи электрического тока, связь с возможностью передачи механического движения, связь с возможностью передачи света, звука, электромагнитных или механических колебаний и т.д. Конкретный вид функциональной связи определяется характером взаимодействия упомянутых элементов, и, если не указано иное, обеспечивается широко известными средствами, используя широко известные в технике принципы.
Способы, раскрытые здесь, содержат один или несколько этапов или действий для достижения описанного способа. Этапы и/или действия способа могут заменять друг друга, не выходя за пределы объема формулы изобретения. Другими словами, если не определен конкретный порядок этапов или действий, порядок и/или использование конкретных этапов и/или действий может изменяться, не выходя за пределы объема формулы изобретения.
В заявке не указано конкретное программное и аппаратное обеспечение для реализации блоков на чертежах, но специалисту в области техники должно быть понятно, что сущность изобретения не ограничена конкретной программной или аппаратной реализацией, и поэтому для осуществления изобретения могут быть использованы любые программные и аппаратные средства известные в уровне техники. Так аппаратные средства могут быть реализованы в одной или нескольких специализированных интегральных схемах, цифровых сигнальных процессорах, устройствах цифровой обработки сигналов, программируемых логических устройствах, программируемых пользователем вентильных матрицах, процессорах, контроллерах, микроконтроллерах, микропроцессорах, электронных устройствах, других электронных модулях, выполненных с возможностью осуществлять описанные в данном документе функции, компьютер либо комбинации вышеозначенного.
Несмотря на то, что примерные варианты осуществления были подробно описаны и показаны на сопроводительных чертежах, следует понимать, что такие варианты осуществления являются лишь иллюстративными и не предназначены ограничивать более широкое изобретение, и что данное изобретение не должно ограничиваться конкретными показанными и описанными компоновками и конструкциями, поскольку различные другие модификации могут быть очевидны специалистам в соответствующей области.
Признаки, упомянутые в различных зависимых пунктах формулы, а также реализации, раскрытые в различных частях описания могут быть скомбинированы с достижением полезных эффектов, даже если возможность такого комбинирования не раскрыта явно.
Изобретение относится к области определения местоположения. Технический результат заключается в обеспечении возможности точного и быстрого обнаружения своего местоположения неограниченным количеством меток. Такой результат достигается тем, что формируют пары анкеров, выполненных на основе приемопередатчиков с таймерами, для обмена сообщениями согласно заранее заданному расписанию, калибруют каждую пару анкеров для определения задержек в анкерах пары с помощью эталонной метки, упомянутые пары анкеров обмениваются по меньшей мере двумя сообщениями, прикрепленная к объекту по меньшей мере одна метка последовательно принимает сообщения, передаваемые последовательно по меньшей мере тремя парами анкеров, регистрирует время приема этих сообщений, расшифровывает служебную информацию, содержащуюся в этих сообщениях, и определяет длительность времени между моментами времени приема сообщений от пар анкеров с учетом проведенной калибровки, прикрепленная к объекту по меньшей мере одна метка определяет свое местоположение на основании известного местоположения анкеров и длительности времени между моментами времени приема сообщений от пар анкеров. 2 н. и 8 з.п. ф-лы, 5 ил.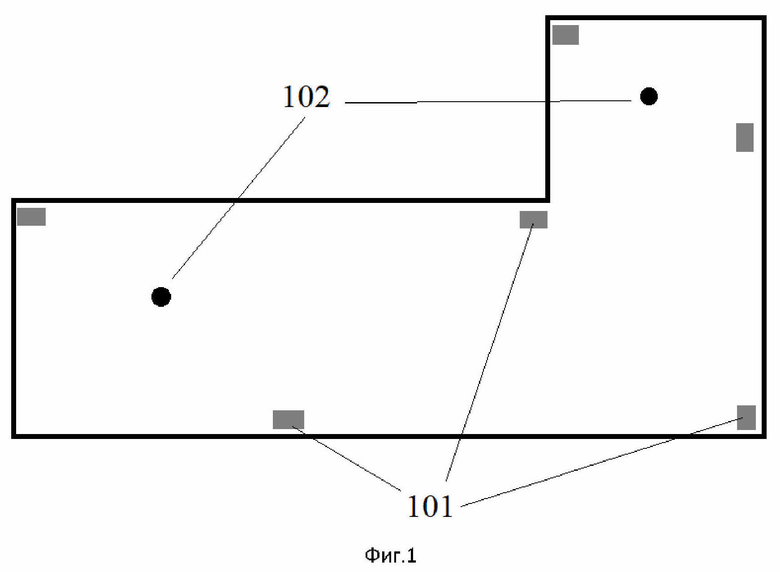
1. Способ определения местоположения объекта, содержащий этапы, на которых:
- формируют пары анкеров, выполненных на основе приемопередатчиков с таймерами, для обмена сообщениями согласно заранее заданному расписанию;
- калибруют каждую пару анкеров для определения задержек в анкерах пары с помощью эталонной метки;
- упомянутые пары анкеров обмениваются по меньшей мере двумя сообщениями;
- прикрепленная к объекту по меньшей мере одна метка последовательно принимает сообщения, передаваемые последовательно по меньшей мере тремя парами анкеров, регистрирует время приема этих сообщений, расшифровывает служебную информацию, содержащуюся в этих сообщениях, и определяет длительность времени между моментами времени приема сообщений от пар анкеров с учетом проведенной калибровки;
- прикрепленная к объекту по меньшей мере одна метка определяет свое местоположение на основании известного местоположения анкеров и длительности времени между моментами времени приема сообщений от пар анкеров.
2. Способ по п.1, в котором при обмене сообщениями анкеры согласуют свои внутренние часы друг с другом.
3. Способ по п.1, в котором метка определяет степень отраженности сигнала и отбрасывает переотраженные сигналы анкеров.
4. Способ по п.1, в котором при потере сигнала от анкеров метка определяет свое местоположение как последнее достоверно известное или определяет свое местоположение с помощью блока инерциальных измерений.
5. Способ по п.1, в котором метка содержит магнитометр для определения ориентации связанной системы координат (ССК) объекта, к которому прикреплена метка.
6. Способ по п.1, в котором к объекту прикрепляют две метки с известным относительным расположением и по взаимному положению этих меток определяют местоположение объекта и ориентацию ССК объекта.
7. Способ по п.1, в котором метка и по меньшей мере один из анкеров содержат баровысотометр для вычисления меткой своей высоты, при этом показания баровысотометра анкера добавляют в сообщения, которыми анкера обмениваются между собой, и которые получает метка, на основании этих данных метка определяет свою высоту.
8. Способ по п.1, в котором к объекту прикрепляют три метки для оценки пространственного положения ССК объекта или к объекту прикрепляют по меньшей мере две метки и баровысотометр для оценки пространственного положения ССК объекта.
9. Способ по п.1, в котором метка в определённый момент времени сообщает о своем местоположении, выходя в эфир или через интерфейс связи с коммуникационным или робототехническим устройством.
10. Система определения местоположения объекта, содержащая:
- множество анкеров, разделенных на пары, выполненных на основе приемопередатчиков с таймерами и с возможностью обмена сообщениями между собой согласно заранее заданному расписанию;
- по меньшей мере одну прикрепленную к объекту метку, выполненную с возможностью последовательного приема сообщений, которыми обмениваются пары анкеров, регистрации времени приема этих сообщений, расшифровки служебной информации, содержащейся в этих сообщениях, и определения длительность времени между моментами времени приема сообщений от пар анкеров с учетом заранее проведенной калибровки пар анкеров;
причем каждая метка выполнена с возможностью определения своего местоположения на основании длительности времени между моментами времени приема сообщений и известных координат анкеров.
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
| US 6275705 B1, 14.08.2001 | |||
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ | 2017 |
|
RU2697838C1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2013785C1 |
