Изобретения относятся к области инклинометрического исследования скважин и могут быть использованы для измерения отклонения оси скважины от вертикали при различных диаметрах скважин (от нефтепромысловых до рудных скважин алмазного бурения).
Для исследования скважин могут быть использованы инклинометры потенциометрические и феррозондовые, однако потенциометрические обладают низкой точностью и малой надежностью, а феррозондовые не работают в присутствии магнитных масс. Этих недостатков лишены инклинометры, использующие преобразование зенитного угла во временной интервал на основе индукционных фазовращателей - синусно-косинусных вращающихся трансформаторов (СКВТ).
Известен цифровой преобразователь зенитного угла инклинометра (Ковшов Г.Н., Сергеев А.Н., Рогатых Н.П. Цифровой преобразователь зенитного угла инклинометра. "Геофиз. аппаратура", вып.71, Л., "Недра", 1980, с.134-139). В этом преобразователе аналоговые сигналы, амплитуда которых несет информацию о зенитном угле, преобразуются в сдвиг фаз, а сдвиг фаз в длительность импульсов, передаваемых на поверхность по каротажному кабелю. Каждый импульс заполняется стабильной частотой от кварцевого генератора. Несколько преобразований, которым подвергается сигнал, снижают точность его передачи. Устройство, реализующее этот способ, состоит из скважинного снаряда и наземного пульта регистрации, связанных каротажным кабелем. Скважинный модуль содержит блок питания, СКВТ, первичный датчик угла наклона (зенитный маятник) и схему преобразования угол-фаза-временной интервал. При использовании СКВТ для определения зенитного угла необходимо наличие эксцентричного груза. Для заполнения импульсов служит схема совпадения, работающая от стабильного кварцевого генератора, размещенная в наземном пульте. Кроме того, наземный пульт содержит делитель частоты и счетчик импульсов. "Недостатком устройства является низкая точность измерения зенитного угла из-за неточной установки ротора СКВТ под действием эксцентричного груза, что объясняется трением в скользящих контактах и подшипниках СКВТ. Низкая точность известного устройства определяется также отличием огибающих выходных напряжений СКВТ от гармонического сигнала из-за наличия поперечной реакции якоря (статора) СКВТ" (а.с. СССР №1008431 от 07.07.81, кл, Е 21 В 47/02), Для обеспечения достаточной точности установки ротора СКВТ приходится создавать сложные в исполнении прецизионные механические системы.
Наиболее близкими аналогами предлагаемых устройства и способа являются преобразователь зенитного угла и используемый в нем способ измерения зенитного угла по а.с. СССР №1008431 от 07.07.81 г., м. кл. Е 21 В 47/02). Преобразователь содержит СКВТ (датчик зенитного угла), генератор, подключенный к СКВТ, 2 усилителя, подключенные входами к обмоткам СКВТ, а выходами к RC-фазовращателю, преобразователь фаза - временной интервал, подключенный входом к фазовращателю, а выходом к регистрирующему устройству. Генератор запитывает через резисторы две статорные обмотки СКВТ и индуктивность переменным током. Преобразователь предназначен для измерения отклонения оси буровых скважин от вертикали. В процессе измерения при повороте ротора СКВТ меняются напряжения на обмотках, которые подключены к усилителям таким образом, что на выходе усилителей появляется напряжения, зависящие от синуса и косинуса зенитного угла. Эти напряжения поступают на фазовращатель. Выходное напряжение фазовращателя изменяется пропорционально зенитному углу. Оно поступает на вход преобразователя фаза - временной интервал, который формирует последовательность импульсов с длительностью, пропорциональной зенитному углу. В регистрирующем устройстве временной интервал заполняется импульсами высокой частоты, которые преобразуются в код путем подсчета, а также производится усреднение и индикация результата измерения. В этом способе улучшена форма огибающей по сравнению с предыдущим аналогом за счет введения индуктивности и исключены скользящие контакты в устройстве. Однако информационный сигнал подвергается ряду сложных преобразований, достаточную степень точности которых обеспечить трудно. Конструкция устройства остается весьма сложной и сохраняются высокие требования к выполнению механической системы.
Ставится задача повышения точности и надежности измерений зенитного угла за счет упрощения конструкции и снижения требований к исполнению механической системы, сокращения числа преобразований сигнала за счет обеспечения точности и надежности передачи аналогового сигнала по длинному кабелю, а также увеличения диапазона измерения зенитного угла. Измерение зенитного угла должно производиться во время спускоподъемной операции скважинного объекта, предназначенного для геофизических измерений.
Задача решается тем, что в способе измерения зенитного угла скважинного объекта, предполагающем наличие в составе объекта синусно-косинусного вращающегося трансформатора, до погружения объекта в скважину снимают семейство зависимостей выходного напряжения синусной и косинусной обмоток трансформатора от угла поворота объекта вокруг своей оси при прямом и обратном поворотах при различных зенитных углах, строят семейство кривых соответствия между разностью углов поворота объекта вокруг своей оси при прямом и обратном поворотах, соответствующих одному уровню значений напряжений синусной или косинусной обмоток трансформатора, и значением зенитного угла при различных значениях этих напряжений, затем вводят объект в скважину и при перемещении его с поворотом вокруг своей оси вдоль скважины снимают зависимость выходного напряжения синусной или косинусной обмоток трансформатора от угла поворота объекта вокруг своей оси при прямом и обратном ходе, причем при прямом и обратном ходе обеспечивают поворот объекта вокруг своей оси в противоположных направлениях, определяют разность углов поворота объекта вокруг своей оси, соответствующих одним и тем же выбранным значениям напряжений соответственно синусной или косинусной обмоток трансформатора, при прямом и обратном ходе, и по величине этой разности по ранее построенной зависимости для соответствующих значений выходного напряжения синусной и/или косинусной обмоток трансформатора, определяют значение зенитного угла скважинного объекта.
Задача решается также тем, что в устройстве для измерения зенитного угла скважинного объекта, состоящем из скважинного модуля и наземного пульта, соединенных трехпроводной линией связи, причем скважинный модуль содержит датчик угла поворота объекта вокруг своей оси, задающий генератор, преобразователь напряжение-ток, коммутирующее устройство, дешифратор команд и источник питания, причем датчик угла поворота включает синусно-косинусный вращающийся трансформатор, эксцентричный груз и соединяющую их муфту, синусно-косинусный вращающийся трансформатор жестко связан с объектом и соединен с генератором, наземный пульт содержит устройство управления, преобразователь ток-напряжение и регистрирующее устройство, причем устройство управления соединено с источником питания, соединенным с дешифратором, который соединен с коммутатором, синусная и косинусная обмотки синусно-косинусного вращающегося трансформатора через коммутирующее устройство соединены с преобразователем напряжение-ток, который через линию связи соединен с преобразователем ток-напряжение наземного пульта, а преобразователь ток-напряжение соединен с регистрирующим устройством.
В другом варианте выполнения задача решается тем, что в устройстве для измерения зенитного угла скважинного объекта, состоящем из скважинного модуля и наземного пульта, соединенных четырехпроводной линией связи, причем скважинный модуль содержит датчик угла поворота объекта вокруг своей оси, задающий генератор, два преобразователя напряжение-ток и источник питания, причем датчик угла поворота включает синусно-косинусный вращающийся трансформатор, эксцентричный груз и соединяющую их муфту, синусно-косинусный вращающийся трансформатор жестко связан с объектом и соединен с генератором, наземный пульт содержит два преобразователя ток-напряжение, регистрирующее устройство и источник питания, причем источник питания наземного пульта соединен с источником питания скважинного модуля, синусная и косинусная обмотки синусно-косинусного вращающегося трансформатора через преобразователи напряжение-ток соединены с преобразователями ток-напряжение наземного пульта, а преобразователи ток-напряжение соединены с регистрирующим устройством.
В предложенном способе зенитный угол скважинного объекта измеряется косвенно по расхождению значений выходного сигнала СКВТ при прямом и обратном вращении его статора относительно неподвижного ротора. При этом не требуется высокая степень синусоидальности сигнала и точное совпадение формы напряжения при прямом и обратном повороте статора относительно ротора, что существенно снижает требования к выполнению механической системы.
В устройстве использована другая схема подключения СКВТ, чем в аналогах. Задающая статорная обмотка подключена к генератору, а с двух других обмоток снимаются сигналы, пропорциональные синусу и косинусу угла поворота статора относительно ротора, что позволяет сравнить эти сигналы при прямом и обратном повороте скважинного объекта.
Кроме того, преобразование напряжения с обмоток СКВТ в ток заменяет неидеальный источник напряжения (СКВТ) на практически идеальный источник тока, что обеспечивает точную передачу аналогового напряжения датчика по длинному кабелю при условии согласования кабеля с нагрузкой. Все это позволяет отказаться от сложных преобразований сигнала, примененных в прототипе, и тем самым повысить точность и надежность передачи сигнала по кабелю.
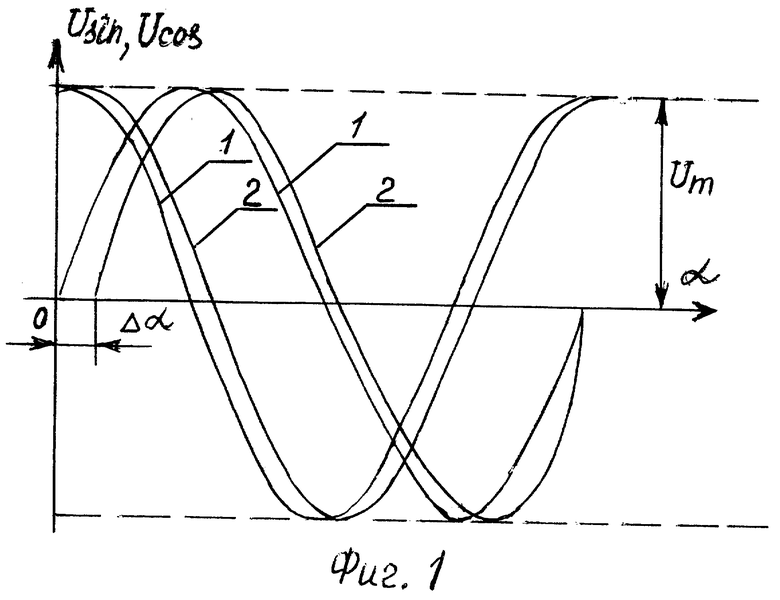
На фиг.1 представлена зависимость напряжений, снимаемых с обмотки синусно-косинусного вращающегося трансформатора Usin и Ucos, от угла поворота α объекта вокруг своей оси. 1 - зависимость Usin и Ucos от α при прямом повороте объекта вокруг своей оси. 2 - при обратном повороте.
На фиг.2 представлена зависимость разности Δα углов поворота объекта вокруг своей оси при прямом и обратном повороте от значения зенитного угла θ, соответствующая определенному уровню значения Usin.
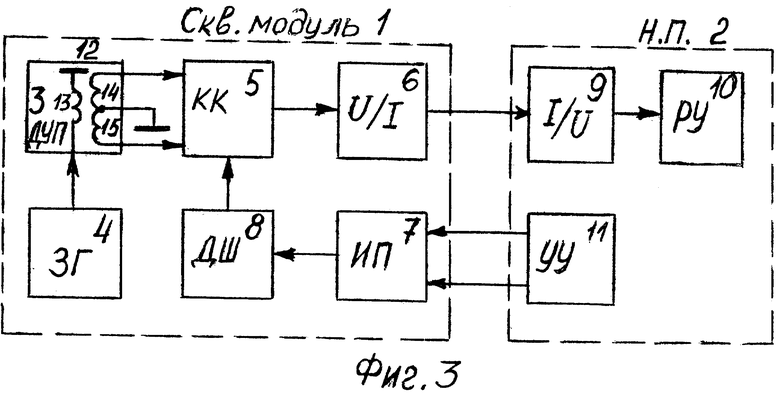
На фиг.3 представлен один из возможных вариантов электрической схемы устройства измерения зенитного угла.
На фиг.4 представлен другой возможный вариант электрической схемы устройства измерения зенитного угла.
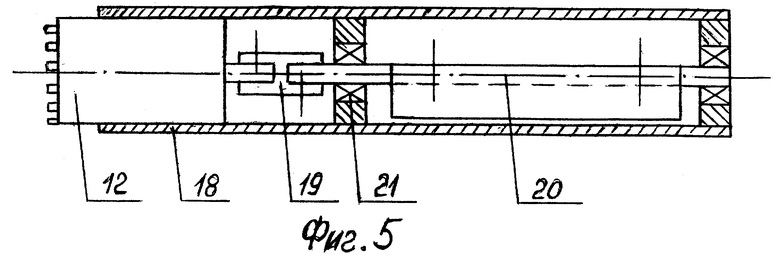
На фиг.5 приведена кинематическая схема датчика угла поворота предлагаемого устройства.
Для осуществления способа необходимо произвести следующие операции.
1. До погружения объекта, содержащего синусно-косинусный вращающийся трансформатор, в скважину снимают семейство зависимостей выходного напряжения синусной и косинусной обмоток трансформатора Usin и Ucos соответственно от угла поворота α объекта вокруг своей оси при прямом и обратном повороте при различных зенитных углах.
2. Строят семейство зависимостей разности Δα углов поворота объекта вокруг своей оси при прямом и обратном повороте, соответствующей одному уровню значений соответственно Usin и Ucos, от значения зенитного угла θ для различных значений Usin и Ucos.
3. Вводят объект в скважину и при перемещении его с поворотом вокруг своей оси вдоль скважины измеряют Usin и Ucos при изменении угла поворота α при прямом и обратном ходе. При прямом и обратном ходе обеспечивают поворот объекта вокруг своей оси в противоположных направлениях. (Угол α можно определить по совокупности значений Usin и Ucos. Измерение обоих значений напряжений устраняет неоднозначность определения угла). В том случае, если значение угла α соответствует участку быстрого изменения Usin и Ucos, достаточно измерения одного из этих напряжений.
4. Определяют разность Δα углов поворота объекта вокруг своей оси, соответствующих одним и тем же выбранным значениям напряжений Usin и Ucos, при прямом и обратном ходе.
5. По величине Δα по зависимости, построенной в соответствии с п.2 для соответствующих значений Usin и Ucos, определяют значение зенитного угла 9 скважинного объекта.
Устройство измерения зенитного угла (фиг.3) содержит скважинный модуль 1 и наземный пульт 2, соединенные трехпроводной линией связи. Скважинный модуль включает датчик 3 угла поворота, задающий генератор 4, коммутатор 5, преобразователь 6 напряжение-ток, источник питания 7, дешифратор 8. Наземный пульт 2 включает преобразователь ток-напряжение 9, регистрирующее устройство 10 и устройство управления 11. В датчике угла поворота находится СКВТ 12, который имеет три обмотки 13, 14, 15.
Генератор 4 скважинного модуля 1 соединен с обмоткой 13 СКВТ. Обмотки синусная 14 и косинусная 15 соединены со входами коммутатора 5. Выход коммутатора 5 соединен со входом преобразователя 6 напряжение-ток. Источник питания 7 соединен со входом дешифратора, выход которого соединен с управляющим входом коммутатора 5. В наземном пульте 2 вход преобразователя 9 ток-напряжение соединен с выходом преобразователя 6 напряжение-ток, а его выход соединен с регистрирующим устройством 10. Устройство управления 11 соединено двумя проводами линии связи с источником питания 7 скважинного модуля 1.
Другой возможный вариант устройства (фиг.4) содержит скважинный модуль 1 и наземный пульт 2, соединенные четырехпроводной линией связи. Скважинный модуль включает датчик 3 угла поворота, задающий генератор 4, два преобразователя 6 напряжение-ток и источник питания 16. Наземный пульт 2 включает два преобразователя ток-напряжение 9, регистрирующее устройство 10 и источник питания 17. В датчике угла поворота находится СКВТ 12, который имеет три обмотки 13, 14, 15.
Генератор 4 скважинного модуля 1 соединен с обмоткой 13 СКВТ. Обмотки синусная 14 и косинусная 15 соединены со входами преобразователей 6 напряжение-ток. В наземном пульте 2 входы преобразователей 9 ток-напряжение соединены с выходами преобразователей 6 напряжение-ток, а их выходы соединены с регистрирующим устройством 10. Источник питания 17 соединен двумя проводами линии связи с источником питания 16 скважинного модуля 1. Источник питания 7 (фиг.3) отличается от источника питания 16 (фиг.4) наличием схемы выделения импульсов управления.
Датчик угла поворота 3 (фиг.5) представляет собой СКВТ 12, заключенный в корпус 18, соединенный муфтой 19 с осью 20 с эксцентрическим грузом. Ось 20 заключена в корпусе 18 на подшипниках 21.
Измерения производятся при движении объекта по скважине вниз и вверх. При этом происходит вращение объекта за счет того, что при навивке нитей брони возникает крутящий момент. Даже при навивке второго слоя брони в противоположном направлении крутящий момент остается за счет невозможности идеальной компенсации двух моментов. Вносит вклад также трение скважинного объекта и брони кабеля о стенки скважины и скважинную жидкость. Факт вращения объекта в скважине подтверждается экспериментально. При этом при спуске и подъеме вращение происходит в противоположных направлениях. Если действие различных факторов, обеспечивающих вращение скважинного объекта, будет скомпенсировано, достаточно добавить дополнительную неровность на поверхность объекта или кабеля, чтобы возникло вращение.
При вращении скважинного объекта вокруг своей оси, а вместе с ним и датчика угла поворота, на выходе последнего изменяются сигналы Usin и Ucos. За счет неидеальности выполнения механической системы эти сигналы при прямом и обратном ходе будут различаться, причем расхождение будет тем больше, чем менее точно она выполнена (фиг.1). Снимают зависимости Usin и Ucos от угла поворота α при прямом и обратном ходе объекта по скважине. При этом напряжения с обмоток 14 и 15 СКВТ через коммутатор (фиг.3) или непосредственно (фиг.4) поступают на преобразователи напряжение-ток. Наличие коммутатора в первом варианте выполнения устройства обусловило введение в состав скважинного модуля дешифратора команд и, соответственно в наземный пульт - устройства управления, которое подает команду на подключение либо синусной, либо косинусной обмотки. Устройство управления может быть выполнено по известным схемам, выбор которых обусловлен его функцией. Команды подаются по проводам питания.
Затем через линию связи они поступают на обратные преобразователи ток-напряжение (обычный резистор) и далее на регистрирующее устройство. Определяют величину расхождения между кривыми Δα. Экспериментально установлено, что Δα изменяется с изменением зенитного угла скважины θ.
Для того чтобы установить соответствие величины Δα. определенному зенитному углу, до погружения объекта в скважину необходимо снять семейство зависимостей выходного напряжения синусной и косинусной обмоток трансформатора Usin и Ucos соответственно от угла поворота α объекта вокруг своей оси при прямом и обратном повороте при различных зенитных углах (фиг.2). Затем строят семейство зависимостей разности Δα углов поворота объекта вокруг своей оси при прямом и обратном повороте, соответствующей одному уровню значений соответственно Usin и Ucos, от значения зенитного угла θ для различных значений Usin и Ucos. Имея такое семейство кривых, можно в процессе измерения по измеренному значению Δα получать значение зенитного угла θ.
Предложенный способ позволяет измерять зенитный угол в диапазоне от 1° до 45° с точностью не хуже 0,5°.
Применяя первый вариант устройства, можно использовать широко распространенный трехжильный каротажный кабель с броневой оболочкой, причем оболочка используется только как экран для защиты от помех.
Если есть возможность использовать многожильный кабель, предлагается второй вариант устройства, предусматривающий связь по четырем жилам кабеля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля зенитных углов и положения отклонителя в скважине | 1983 |
|
SU1155733A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА, ЗЕНИТНОГО УГЛА И УГЛА МАГНИТНОГО НАКЛОНЕНИЯ | 1997 |
|
RU2131029C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ И ПОЛОЖЕНИЯ ОТКЛОНИТЕЛЯ ПРИ БУРЕНИИ | 2001 |
|
RU2184845C1 |
| Преобразователь зенитного угла | 1981 |
|
SU1008431A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ВАЛА ПРИВОДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2580153C1 |
| Автономный одноточечный инклинометр | 1988 |
|
SU1564331A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2005 |
|
RU2286012C1 |
| Датчик положения ротора | 2023 |
|
RU2816167C1 |
| Преобразователь угла поворота вала в код | 1984 |
|
SU1179536A2 |
| Устройство для контроля комплекса параметров траектории скважин и угла установки отклонителя бурового инструмента | 1982 |
|
SU1078041A1 |


Изобретение относится к исследованию скважин. Техническим эффектом изобретения является повышение точности и надежности за счет упрощения конструкции и снижения требований к выполнению механической системы устройства и упрощения числа преобразований сигнала. Основным элементом устройства является датчик угла поворота, состоящий из синусно-косинусного вращающегося трансформатора (СКВТ), ось которого с помощью муфты соединяется с осью эксцентричного груза. При этом СКВТ и подшипники оси груза помещены в едином корпусе. Положение ротора фиксируется эксцентричным грузом в поле силы тяжести. Синусоидальное напряжение подается в обмотку статора СКВТ. Измеряемое напряжение снимается с синусной и косинусной обмоток ротора. При горизонтально расположенном датчике при вращении корпуса датчика вокруг своей оси относительно неподвижного ротора от 0° до 360° и обратно от 360° до 0° выходные напряжения синусной (косинусной) обмотки, построенные в зависимости от угла поворота, практически совпадают. Если датчик расположен не горизонтально, а под углом, большим, чем 45° от горизонтали, то наблюдается определенное расхождение этих кривых. При измерениях в скважине вращать корпус датчика, расположенного в кожухе скважинного модуля, будет бронированный кабель, на котором скважинный модуль опускается в скважину. Этот кабель обладает за счет своей брони крутящим моментом. При спуске он раскручивается, при подъеме закручивается в обратную сторону. При спуске и подъеме измеряются углы поворота датчика вокруг его оси. Полученное расхождение в этих углах, сравнивается с тем расхождением, которое было получено при предварительных измерениях на поверхности, и таким образом определяется зенитный угол скважинного объекта. 3 н.п. ф-лы, 5 ил.
| Преобразователь зенитного угла | 1981 |
|
SU1008431A1 |
| Устройство для определения координат траектории скважины | 1980 |
|
SU909145A1 |
| Устройство для контроля комплекса параметров траектории скважин и угла установки отклонителя бурового инструмента | 1982 |
|
SU1078041A1 |
| Автономный одноточечный инклинометр | 1988 |
|
SU1564331A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА, ЗЕНИТНОГО УГЛА И УГЛА МАГНИТНОГО НАКЛОНЕНИЯ | 1997 |
|
RU2131029C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ И ПОЛОЖЕНИЯ ОТКЛОНИТЕЛЯ ПРИ БУРЕНИИ | 2001 |
|
RU2184845C1 |
| US 4813274 A, 21.03.1989 | |||
| ПРОЗРАЧНАЯ И ГИБКАЯ КОМПОЗИЦИЯ ПРОПИЛЕНОВЫХ ПОЛИМЕРОВ И ИЗДЕЛИЕ, ПОЛУЧЕННОЕ ИЗ НЕЕ | 2002 |
|
RU2296772C2 |
| DE 3135743 A, 19.05.1982 | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| Машина для формования железобетонных тонкостенных пространственных криволинейных покрытий сводов двойной кривизны | 1957 |
|
SU109830A1 |

