Изобретение относится к области промысловой геофизики и может быть использовано для контроля комплекса параметров пространственной ориентации траектории скважины и скважинных объектов.
Известен способ контроля комплексов параметров траектории скважины, реализованной в устройстве [1], включающий измерение трех ортогональных составляющих вектора напряженности магнитного поля Земли с помощью трехкомпонентного феррозондового датчика азимута, измерение синусов и косинусов соответственно зенитного и визирного углов с помощью маятникового преобразователя по кинематической схеме карданного подвеса, на осях вращения которого установлены синусно-косинусные вращающиеся трансформаторы, и определение по измеренным сигналам азимута, и определение по измеренным сигналам азимута, зенитного и визирного углов [1].
Известен также способ контроля комплекса параметров траектории скважины, реализованный в устройстве [2], включающий измерение трех неортогональных составляющих вектора напряженности магнитного поля Земли с помощью феррозондового датчика азимута, измерение синусов и косинусов соответственно зенитного угла, визирного угла и угла неортогональной установки первого и второго феррозондов в датчике азимута и определение по измеренным сигналам азимута, зенитного и визирного углов [2].
Недостатки аналогов следующие. Сложность конструкции и низкая точность, обусловленные наличием механических вращающихся частей преобразователя зенитного угла в карданном подвесе, характеризующихся моментом сил трения в опорах подвеса, обуславливающих погрешность определения искомых угловых параметров.
Наиболее близким по технической сущности и достигаемому результату является способ измерения угловых параметров пространственной ориентации скважинных объектов, включающий установку в корпусе скважинного прибора трехкомпонентного феррозондового магнитометра и преобразователя визирного угла, выполненного в виде относительного маятника с установленным на оси его вращения синусно-косинусным вращающимся трансформатором (СКВТ), причем оси чувствительности феррозондов ориентированы ортогонально друг другу, а ось третьего феррозонда и ось вращения маятника совпадают с продольной осью корпуса скважинного прибора, измерение сигналов с феррозондов, пропорциональных проекциям полного вектора напряженности геомагнитного поля на оси их чувствительности и сигналов с СКВТ, пропорциональных синусу и косинусу визирного угла, и определение зенитного угла, угла магнитного наклонения и азимута по измеренным сигналам [3].
Недостатки прототипа. Сложность определения угла магнитного наклонения, зенитного угла и азимута, обусловленная громоздкими зависимостями измеряемых сигналов с искомыми угловыми параметрами, а также применением процедуры наземных измерений и низкая точность, обусловленная тем, что угол магнитного наклонения определяют на поверхности Земли, а при обработке результатов измерений не учитывают его изменение по глубине траектории скважины.
Задачей, на решение которой направлено заявляемое изобретение, является повышение точности и упрощение определения азимута α, зенитного θ угла и угла магнитного наклонения ν путем циклического варьирования теоретических значений искомых углов α, θ и ν, выполнение промежуточных вычислений и сравнение модулей разности теоретических значений промежуточных параметров и параметров, определенных путем измерений сигналов с феррозондов и СКВТ и каждой точке изменения по траектории скважины.
Поставленная задача достигается тем, что в способе [3] определения угла магнитного наклонения ν, зенитного θ угла и азимута α, включающем установку в корпусе скважинного прибора трехкомпонентного феррозондового магнитометра и преобразователя визирного угла, выполненного в виде одностепенного маятника с установленным на оси его вращения СКВТ, причем оси чувствительности феррозондов ориентированы ортогонально друг к другу, а ось третьего феррозонда и ось вращения маятника совпадают с продольной осью корпуса скважинного прибора, измерение сигналов с феррозондов TX, TY, TZ, пропорциональных проекциям полного вектора напряженности геомагнитного поля на оси их чувствительности и сигналов с СКВТ, пропорциональных синусу и косинусу визирного угла ϕ, определяют приведенные значения сигналов с феррозондов и СКВТ, по которым находят соотношения 
задают диапазоны варьирования определяемых углов α, θ и υ, задают циклы последовательного варьирования по углам α, θ и ν, с равномерным шагом квантования, для каждого значения заданного угла αi, θi и υi, в точке циклов варьирования определяют теоретические значения
tXi= cosυicosθicosαi-sinυisinθi,
tYi= -cosυisinαi,
tZi= cosυicosαisinθi+sinυicosθi,
находят модули разностей  задают численное значение параметра E, с которым осуществляют сравнение всех трех модулей разности так, что если хотя бы один из модулей разностей имеет величину, большую, чем параметр E, то продолжают последовательные циклы варьирования, а если все три модуля разностей одновременно имеют величины, меньшие или равные параметру E, то циклы варьирования прекращают, а текучие значения углов αi, θi и υi, принимают как искомые угол магнитного наклонения υ, азимут α и зенитный угол θ, причем приведенные значения сигналов с феррозондов и СКВТ определяют следующим образом:
задают численное значение параметра E, с которым осуществляют сравнение всех трех модулей разности так, что если хотя бы один из модулей разностей имеет величину, большую, чем параметр E, то продолжают последовательные циклы варьирования, а если все три модуля разностей одновременно имеют величины, меньшие или равные параметру E, то циклы варьирования прекращают, а текучие значения углов αi, θi и υi, принимают как искомые угол магнитного наклонения υ, азимут α и зенитный угол θ, причем приведенные значения сигналов с феррозондов и СКВТ определяют следующим образом:




где TX, TY, TZ - измерительные сигналы с феррозондов, US и UC - сигналы с синусной и косинусной обмоток СКВТ; шаги квантования по углам α, θ и υ задают равными требуемой точности определения соответственно угла магнитного наклонения, азимута и зенитного угла, а значение параметра E принимают меньшим или равным наименьшему значению из заданных шагов квантования.
На фиг. 1 представлена кинематическая схема, а на фиг. 2 - функциональная схема устройства, реализующего предложенный способ, включающего установку в корпусе 1 скважинного прибора трех ортогонально ориентированных феррозондов 2, 3 и 4 и преобразователя визирного угла, выполненного в виде одностепенного маятника 5 с установленным на оси его вращения СКВТ 6, причем ось чувствительности третьего феррозонда 4 и ось вращения маятника 5 совпадают с продольной осью корпуса 1. Функциональная схема (фиг. 2) устройства также содержит генераторы возбуждения феррозондов 7 и СКВТ 11, аналоговые коммутаторы 8, 12 и 14, избирательный усилитель 9, фазочувствительные детекторы 10 и 13, интегратор 15, аналогоцифровой преобразователь (АЦП) 16, блок передачи данных 17, ЭВМ 18 и блок управления 19.
Работа устройство заключается в следующем. Генератор возбуждения 7 обеспечивает подачу напряжения необходимой амплитуды и частоты на последовательно соединенные обмотки возбуждения феррозондов 2, 3 и 4. Сигналы TX, TY и TZ, пропорциональные проекциям напряженности геомагнитного поля на оси чувствительности феррозондов 2, 3 и 4, последовательно через аналоговый коммутатор 8 поступают на вход избирательного усилителя 9. Синусоидальное напряжение удвоенной частоты с выхода избирательного усилителя 9 детектируется в фазочувствительном детекторе 10 и через третий аналоговый коммутатор 14 подается на вход интегратора 15, в котором преобразуется уровень постоянного напряжения, пропорционального соответственно сигналам TX, TY и TZ. Обмотка возбуждения СКВТ 6 запитывается от генератора 11, а выходные сигналы US и UC, пропорциональные соответственно синусу и косинусу визирного угла ϕ, через второй аналоговый коммутатор 12, второй фазочувствительный детектор 13 и третий аналоговый коммутатор 14 последовательно поступают на вход интегратора 15, в котором также преобразуются в уровень постоянного напряжения, пропорционального соответственно сигналам US и UC. Далее сигналы TX, TY, TZ, US и UC преобразуются в АЦП 16 в цифровые коды, которые посредством блока передачи данных 17 поступают в ЭВМ 18.
Блок управления 19 отрабатывает необходимые управляющие команды на аналоговые коммутаторы 8, 12 и 14, фазочувствительные детекторы 10 и 13, интегратор 15, АЦП 16, блок передачи данных 17, а также обеспечивает поступление тактовых импульсов на генераторы 7 и 11.
Таким образом, в каждой точке измерения по траектории скважины в ЭВМ 18 формируются коды, соответствующие измеренным сигналам TX, TY, TZ, US и UC, причем US соответствует синусу визирного угла, UC - косинусу визирного угла, а сигналы с феррозондов связаны с азимутом α, зенитным углом θ, визирным углом ϕ, углом магнитного наклонения υ и величиной полного вектора напряженности геомагнитного поля T следующими уравнениями:

TZ = T[cosυcosαsinθ+sinυcosθ].
Способ определения азимута α, зенитного угла θ и угла магнитного наклонения υ по измеренным сигналам с феррозондов TX, TY, TZ и сигналам с СКВТ US и UC заключается в следующем. Определяют приведенные значения сигналов



Затем определяют промежуточные параметры:

Задают диапазоны варьирования определяемых углов α, θ и υ, задают циклы последовательного варьирования по углам α, θ и υ , с равномерным шагом квантования, после чего для каждого значения заданного угла αi, θi и υi в точке циклов варьирования определяют теоретические значения: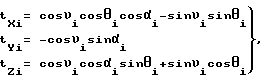
находят модули разностей  задают численное значение параметра E, с которым осуществляют сравнение всех трех модулей разностей так, что если хотя бы один из модулей разностей имеет величину, большую, чем параметр E, то есть
задают численное значение параметра E, с которым осуществляют сравнение всех трех модулей разностей так, что если хотя бы один из модулей разностей имеет величину, большую, чем параметр E, то есть
то продолжают последовательные циклы варьирования, а если все три модуля разностей одновременно имеют величины, меньшие или равные параметру E, то есть
то циклы варьирования прекращают, а текущие значения углов αi, θi и υi принимают как искомые угол магнитного наклонения υ, азимут α и зенитный угол θ, причем шаги квантования по углам α, θ и υ задают равными требуемой точности определения данных углов, а значение параметра E принимают меньшим или равным наименьшему значению из заданных шагов квантования.
Итак, заявляемое изобретение позволяет повысить точность и упростить определение искомых углов α, θ и υ путем циклического варьирования теоретических значений данных углов, выполнения промежуточных вычислений и сравнения модулей разностей теоретических значений промежуточных параметров и параметров, определенных путем измерений сигналов с феррозондов и СКВТ.
Источники информации
1. Авторское свидетельство СССР N 1078041, М. кл. E 21 B 47/02, 1984 г.
2. Авторское свидетельство СССР N 1208208, М. кл. E 21 B 47/02, 1986 г.
3. Авторское свидетельство СССР N 1543060, М. кл. E 21 B 47/02, 1987 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ И ПОЛОЖЕНИЯ ОТКЛОНИТЕЛЯ ПРИ БУРЕНИИ | 2001 |
|
RU2184845C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО И ВИЗИРНОГО УГЛОВ | 1997 |
|
RU2121573C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО И ВИЗИРНОГО УГЛОВ | 1997 |
|
RU2121575C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНЫХ И ВИЗИРНЫХ УГЛОВ | 1997 |
|
RU2121574C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2012 |
|
RU2503810C1 |
| СПОСОБ СКВАЖИННОЙ ИНКЛИНОМЕТРИИ И СКВАЖИННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2770874C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2000 |
|
RU2166084C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА УГЛОВЫХ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ БУРОВОГО ИНСТРУМЕНТА | 2015 |
|
RU2610957C1 |
| СПОСОБ КАЛИБРОВКИ ИНКЛИНОМЕТРИЧЕСКИХ СИСТЕМ | 2015 |
|
RU2611567C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОЛНОГО ВЕКТОРА МАГНИТНОГО ПОЛЯ, А ТАКЖЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2218577C2 |

Изобретение относится к промысловой геофизике и может быть использовано для контроля комплекса параметров пространственной ориентации траектории скважины и скважинных объектов. Задачей изобретения является повышение точности и упрощение определения азимута α, зенитного угла θ и угла магнитного наклонения υ. Для этого измеряют сигналы с феррозондов Tx, Ty и Tz трехкомпонентного геомагнитомера, измеряют сигналы с СКВТ, пропорциональные синусу Us и косинусу Uc визирного угла. Находят по математической зависимости приведенные значения данных сигналов T . Задают численное значение параметра Е, с которым осуществляют сравнение всех трех модулей разностей. Если хотя бы один из модулей разностей имеет величину, большую, чем параметр Е, то продолжают последовательные циклы варьирования. Если все три модуля разностей одновременно имеют величины, меньшие или равные параметру Е, то циклы варьирования прекращают. Текущие значения углов αi, θi, νi принимают как искомые. 1 з.п. ф-лы, 2 ил.
. Задают численное значение параметра Е, с которым осуществляют сравнение всех трех модулей разностей. Если хотя бы один из модулей разностей имеет величину, большую, чем параметр Е, то продолжают последовательные циклы варьирования. Если все три модуля разностей одновременно имеют величины, меньшие или равные параметру Е, то циклы варьирования прекращают. Текущие значения углов αi, θi, νi принимают как искомые. 1 з.п. ф-лы, 2 ил.
 задают диапазоны варьирования определяемых углов α, θ и υ, задают циклы последовательного варьирования по углам α, θ и υ с равномерным шагом квантования для каждого значения заданных углов αi, θi и υi, в точке циклов варьирования определяют теоретические значения
задают диапазоны варьирования определяемых углов α, θ и υ, задают циклы последовательного варьирования по углам α, θ и υ с равномерным шагом квантования для каждого значения заданных углов αi, θi и υi, в точке циклов варьирования определяют теоретические значения
находят модули разностей  задают численное значение параметра Е, с которым осуществляют сравнение всех трех модулей разностей так, что если хотя бы один из модулей разностей имеет величину, большую, чем параметр Е, то продолжают последовательные циклы варьирования, а если все три модуля разностей одновременно имеют величины, меньшие или равные параметру Е, то циклы варьирования прекращают, а текущие значения углов αi, θi и υi принимают как искомые угол магнитного наклонения υ, азимут α и зенитный угол θ.
задают численное значение параметра Е, с которым осуществляют сравнение всех трех модулей разностей так, что если хотя бы один из модулей разностей имеет величину, большую, чем параметр Е, то продолжают последовательные циклы варьирования, а если все три модуля разностей одновременно имеют величины, меньшие или равные параметру Е, то циклы варьирования прекращают, а текущие значения углов αi, θi и υi принимают как искомые угол магнитного наклонения υ, азимут α и зенитный угол θ.
2. Способ по п.1, отличающийся тем, что приведенные значения сигналов с феррозондов и СКВТ определяют следующим образом:




где Tx, Ty, Tz - измеренные сигналы с феррозондов: Us и Uc - сигналы с синусной и косинусной обмоток СКВТ, шаги квантования по углам α, θ и υ задают равными требуемой точности определения соответственно угла магнитного наклонения υ, азимута α и зенитного угла θ, а значение параметра Е принимают меньшим или равным наименьшему значению из заданных шагов квантования.
| SU 1543060 A1, 15.02.90 | |||
| Устройство для контроля комплекса параметров искривления скважин | 1984 |
|
SU1208208A1 |
| Устройство для контроля комплекса параметров траектории скважин и угла установки отклонителя бурового инструмента | 1982 |
|
SU1078041A1 |
| Способ определения пространственного положения скважинного снаряда | 1989 |
|
SU1701901A1 |
| RU 94007010 A1, 20.11.95 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА СКВАЖИНЫ В ПОСЛЕДОВАТЕЛЬНЫХ ТОЧКАХ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1991 |
|
RU2030574C1 |
| RU 2062077 C1, 27.06.96 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО И ВИЗИРНОГО УГЛОВ СКВАЖИНЫ | 1991 |
|
RU2017950C1 |
| Исаченко В.Х | |||
| Инклонометрия скважин, М., Недра, 1987. | |||
