Изобретение относится к машиностроению, а именно к механизмам грузоподъемных платформ, способных обеспечивать значительные перемещения рабочей платформы по высоте площадки.
Известна подъемная платформа [1, стр.445, рис.371], которая имеет поступательное перемещение рабочей площадки при обеспечении продольной и поперечной жесткости системы благодаря использованию замкнутых изменяемых контуров. Недостатком такой платформы является невозможность манипулирования рабочей площадкой за пределами опорной части платформы, т.е. в рассматриваемой подъемной платформе рабочая площадка может двигаться в единственном вертикальном направлении.
Известна также конструкция погрузчика [2, стр.465, рис.4.5.4.], в котором грузоподъемная площадка связана с самоходным шасси посредством трехшарнирного приводного шатуна, коромысла, образующих замкнутый изменяемый контур. Рабочая площадка платформы в этом погрузчике может перемещаться не только вертикально вверх-вниз, но и горизонтальном направлении от шасси погрузчика.
Задачей предлагаемого изобретения является расширение возможности платформы по грузоподъемности, по высоте подъема грузов, по надежности и жесткости конструкции, что требует нахождения принципиально нового технического решения.
Сущность изобретения заключается в том, что грузоподъемная платформа, содержащая площадку, ползун, шатун, выполненный в виде треугольного звена, центральное треугольное звено, первый поводок и второй поводки платформы, согласно изобретению снабжена дополнительным треугольным звеном, распорным треугольным звеном и коромыслом, при этом второй и первый поводки, коромысло, дополнительное и центральное треугольные звенья и площадка платформы образуют между собой шестиугольный изменяемый замкнутый контур, а шатун, входящий в кинематическую связь с ползуном, который является ведущим, распорное, центральное и дополнительное треугольные звенья образуют между собой четырехугольный изменяемый замкнутый контур, являющийся наиболее нагруженным, причем распорное звено входит в кинематическую связь собственно с площадкой платформы, центральное треугольное звено кинематически соединено с этой площадкой посредством первого поводка, а дополнительное треугольное звено кинематически соединено с коромыслом.
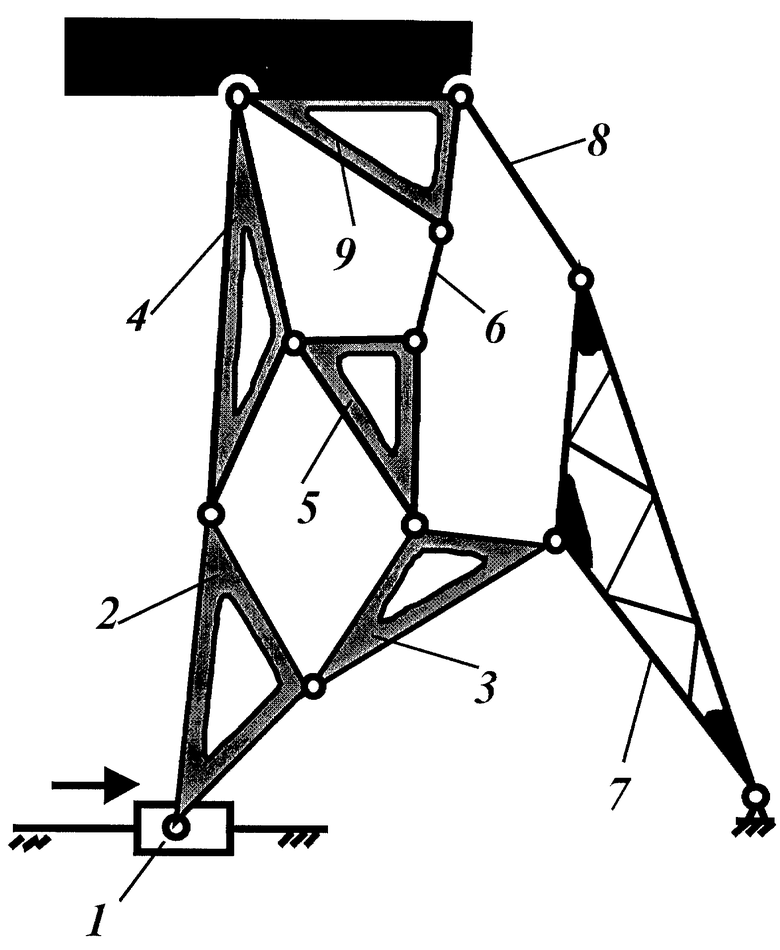
Кинематическая схема грузоподъемной платформы приведена на чертеже. Она содержит в своем составе ведущее звено 1 - ползун, 2 - приводной шатун, 3 - дополнительное треугольное звено, 4 - распорное звено, 5 - центральное треугольное звено, 6 - первый поводок платформы, 7 - коромысло платформы, 8 - второй поводок платформы, 9 - площадка платформы. Звенья собраны так, что в конструкции платформы образовываются три изменяемых замкнутых контура: шестиугольный - из звеньев 8-7-3-5-6 и 9, первый четырехугольный контур из звеньев 6-5-4 и 9 и второй четырехугольный изменяемый контур из звеньев 2-3-4 и 5. Наиболее нагруженным, несущим основную нагрузку от поднимаемого платформой груза, является второй изменяемый четырехугольный контур, который связан непосредственно с ведущим ползуном 1. Особенностью второго изменяемого четырехугольного контура, составленного из звеньев 2-3-4 и 5, является то, что все перечисленные звенья (2-3-4 и 5) выполнены треугольными, т.е. весьма жесткими и прочными, обеспечивающими надежность подъема и удержания груза. При этом треугольное звено 2 входит в кинематическую связь с ведущим ползуном 1; треугольное звено 4 входит в кинематическую связь собственно с платформой 9; треугольное звено 5 посредством первого поводка платформы 6 имеет кинематическую связь с платформой; а треугольное звено 3 кинематически связано с коромыслом.
Работает платформа следующим образом. В результате поступательного движения ведущего ползуна 1 через структурные группы звеньев 2-3-4-5; 3-5-6-9-8-7, образующие между собой изменяемые замкнутые контуры, осуществляется поворот коромысла 7 и подъем площадки платформы 9 с одновременным ее перемещением в горизонтальном направлении. Размеры звеньев платформы подобраны так, что собственно площадка платформы получает поступательное движение, т.е. при вертикальном подъеме и движении в горизонтальном направлении она всегда остается параллельной самой себе.
Работоспособность грузоподъемной платформы доказывается известной формулой подвижности механизмов Чебышева П.Л. [3]
W=3n-2p5,
где n - число звеньев, p5 - число кинематических пар.
В предлагаемой платформе число звеньев n=9, число кинематических пар p5=12. Это означает, что W=27-26=1, т.е. при заданном движении ползуна 1 все остальные звенья будут двигаться вполне определенно.
Источники информации
1. Тарг С.М. Краткий курс теоретической механики. М.: Наука, 1968, 480 с.
2. Энциклопедия машиностроения. Книга 2. М.: Машиностроение, 1995 г.
3. Артоболевский И.И. Теория механизмов. М.: Наука, 1967, 719 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ ПРЕССА | 2001 |
|
RU2201348C1 |
| РЫЧАЖНЫЙ ПРЕОБРАЗОВАТЕЛЬ УСИЛИЙ | 2001 |
|
RU2204748C2 |
| Пространственный шарнирно-рычажный механизм | 1985 |
|
SU1421921A1 |
| БУРОВОЙ МАНИПУЛЯТОР | 2003 |
|
RU2242578C1 |
| ШЕСТИЗВЕННЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2007 |
|
RU2338104C1 |
| ДВУХЩЕКОВАЯ ДРОБИЛЬНАЯ МАШИНА | 2010 |
|
RU2423179C1 |
| ПРИБОР ДЛЯ ОДНОВРЕМЕННОГО ВЫЧЕРЧИВАНИЯ ГРАФИКОВ ПУТИ ПО ВРЕМЕНИ И СКОРОСТИ ВЕДОМОГО ЗВЕНА ЧЕТЫРЕХЗВЕННЫХ ШАРНИРНЫХ МЕХАНИЗМОВ | 1966 |
|
SU214825A1 |
| ЗУБЧАТО-РЫЧАЖНЫЙ ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 2007 |
|
RU2365799C2 |
| Микроманипулятор для сферических объектов | 1986 |
|
SU1366385A1 |
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
Изобретение относится к машиностроению, в частности к механизмам подъемных платформ. Грузоподъемная платформа содержит площадку, ползун, шатун, выполненный в виде треугольного звена, центральное треугольное звено, первый и второй поводки. Платформа снабжена дополнительным треугольным звеном, распорным треугольным звеном и коромыслом. Второй и первый поводки, коромысло, дополнительное и центральное треугольные звенья и площадка платформы образуют между собой шестиугольный изменяемый замкнутый контур. Шатун, входящий в кинематическую связь с ползуном, который является ведущим, распорное, центральное и дополнительное треугольные звенья образуют между собой четырехугольный изменяемый замкнутый контур, являющийся наиболее нагруженным. Распорное звено входит в кинематическую связь собственно с площадкой платформы, центральное треугольное звено кинематически соединено с этой площадкой посредством первого поводка, а дополнительное треугольное звено кинематически соединено с коромыслом. Изобретение позволяет обеспечить повышение надежности и жесткости конструкции платформы. 1 ил.
Грузоподъемная платформа, содержащая площадку, ползун, шатун, выполненный в виде треугольного звена, центральное треугольное звено, первый и второй поводки платформы, отличающаяся тем, что она снабжена дополнительным треугольным звеном, распорным треугольным звеном и коромыслом, при этом второй и первый поводки, коромысло, дополнительное и центральное треугольные звенья и площадка платформы образуют между собой шестиугольный изменяемый замкнутый контур, а шатун, входящий в кинематическую связь с ползуном, который является ведущим, распорное, центральное и дополнительное треугольные звенья образуют между собой четырехугольный изменяемый замкнутый контур, являющийся наиболее нагруженным, причем распорное звено входит в кинематическую связь собственно с площадкой платформы, центральное треугольное звено кинематически соединено с этой площадкой посредством первого поводка, а дополнительное треугольное звено кинематически соединено с коромыслом.
| Энциклопедия машиностроения | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| -М.: Машиностроение, 1995, с.465, рис.4.5.4 | |||
| Подъемник | 1987 |
|
SU1477670A1 |
| РЫЧАЖНЫЙ ПРЕОБРАЗОВАТЕЛЬ УСИЛИЙ | 2001 |
|
RU2204748C2 |
| DE 3148203 A1, 09.06.1983. | |||

