А-А
Сл:)
05
(35 00 00
сд
Изобретение относится к приборостроению и может быть использовано для высокоточного перемещения сферических объектов.
Цель изобретения - повьшение точности позиционирования за счет ликвидации люфтов в кинематической цепи.
На фйг.1 схематически представлен микроманипуляторJ на фиг.2 - то же, вид.сверху; на фиг,3 - разрез А-А на фиг.2.
Микроманипулятор состоит из основания 1, верхней 2 и. нижней 3 платформы с ведущими 4 и ведомыми 5 частями (ползунами), .связанными между собой параллелограммньм механизмом 6, пргокимного, устройства 7, держателей 8 сферического об йекта 9 и двуХкоор-, динатного привода 10 с выходньм звеном поворотным роликом 11 и прижимным устройством 12.
Двухкоординатный привод, 10 платформы вьшолнен в виде двух идентичных однокоординатных механизмов 13, 14 перемещения.-Механизм перемещения по одной координате содержит выходное звено в виде поворотного цилиндрического ролика 11, установленного на опорах 15 в окне 1 основ ания и размещенного между ведущими частями 4 платформ (ползунами) так,что его ось вращения перпендикулярна направлейию перемещения ползунов. Ползуны 4 связаны между собой и с поворотным роликом 11 прижимным устройством 12. При этом каждый ползун установлен на дополнительной опоре 16, а боковь 1и поверхностями - на направляющих 17. Прижимное устройство 12 содерлоит два коромысла 18, установленные на шариках 19, помещенных в желобе ползунов 4, и пружины 20. Прижимное усилие пружин 20 к ползунам регулируется винтами (не показаны).
На поворотном ролике 11 установлен поводок 21, который соединен безлюф- товой зубчатой передачей с шестерней 22 привода 23 (ручного или автоматического) .
Ведомые части 5 платформы подпру- ясинены к опорным площадкам кольцеобразного неподвижного основания 24, установленного на основании 1, при-г жимным устройством 7.
Прижимное устройство 7 состоит из шариковых опор 25 и дисков 26, которые усилием пружин 27 подпружинивают
ведомые части 5 платформ к кольцевому основанию 24.
С ведомыми частями 5 платформы держатели сферического объекта связаны плоскими пружинами 28, которые обеспечивают точную передачу движения Ёдоль осей X и Y и в то же время не допускают проскальзывание сферического объекта в держателях, а также его деформациюс
Ведущие и ведомые части платформы связаны между собой упругими элементами, т.е. жесткими поводками 29 ко
торые своими концами крепятся к ведущим и ведомым частям платформы с помощью плоских пружин 30 и образуют параллелограмм.
Микроманипулятор работает следующим образом.
При повороте шестерни 22 привода 23 повор ачивается ПОВОДОК 21 и, соответственно, поворотньм ролик II, который заставляет перемещаться ведущие части 4 платформ (ползуны) вдоль координатной оси в противоположном направлении. Эти движения через по- водки 29 передаются на соответствующие ведомые части 5 .платформ-, а следовательно, на держатели 8 сфери- ческого объекта. При этом сферический объект 9 поворачивается вокруг оси, параллельной одной из координатных осей. При совместной работе двух однокоординатных механизмов можно осуществлять .поворот объекта по сложной траектории в любом заданном направлении. Причем сферический объект всегда поворачивается вокруг одной точки - центра объекта, кото рая не меняет- своего положения в пространстве. Это позволяет реализовать сложную программу позиционирования сферического объекта в пространстве как непрерывно с заданной скоростью, так и дискретно с заданным шагом позиционирования в ручном или автоматическом режимах.
Пределы перемещения платформ вдоль каждой координаты устанавливаются длиной продольной.щели в ведущих частях платформы, через которую проходит винт црижимногр механизма ползунов. Диаметр исследуемого сферического объекта определяет диапазон перемещения держателей и ведомых частей платформы. Исходя из этого выбираются размеры рабочих площадок держателей 8, опорных площадок кольцевого основания 24, ведомых частей 5 платформы.
рабочих площадок ползунов 4, которыми они прижимаются к поворотному ролику 11., диаметр поворотного ролика, а также диаметр отверстий ведомых частей 5 платформ.
Точность позиционирования сферического объекта определяется, в первую очередь, точностью изготовления цилиндрического поворотного ролика и рабочих площадок ведзтцих частей платформы - ползунов, а также опорных пдощадок кольцевого основания, рабочих площадок ведомых частей платформ и рабочих площадок держателей сферического о.бъекта.
Во избежание проскальзывания сферического объекта, а также его деформации подбирают силу прижима держателей к сферическому объекту, а рабочие площадки держателей делают из эластичного материала с последующей шлифовкой.
Использование в качестве элемента качения цилиндрических роликов обеспечивает выборку всех люфтов в сопряжениях с ползунами. При сопряжений ползун-ролик
этом контакт происходит
использования в качестве элемента качения шарика), а контакт сопряжений платформа-кольцевое основание про
исходит по плоскости, поэтому удельные давления невелики, следовательно, контактные, деформации в этих местах минимальны. Благодаря этому повышается точность позиционирования.
Формула изобретения
Микроманипулятор для сферических объектов, содержащий основание, уста- новленные на нем две кинематически связанные между собой подвижные платформы с телами качения, два держателя сферического объекта, каждый из которых связан с соответствующей платфор- мой, и двухкоординатный привод платформ, отличающийся тем, что, с целью повьшения точности позиционирования за счет ликвидации люфтов в кинематической цепи, обе платформы выполнены из двух частей: ведущей и ведомой, связаны между собой с помощью упругих элементов и подпру- жинены к основанию, причем держатели упрого связаны с ведомыми частями платформ, а привод по каждой координате имеет выходное звено в виде по- воротйого ролика, размещенного между ведомыми частями платформ. , при этом оси поворотных роликов приводов взаимно перпендикулярны.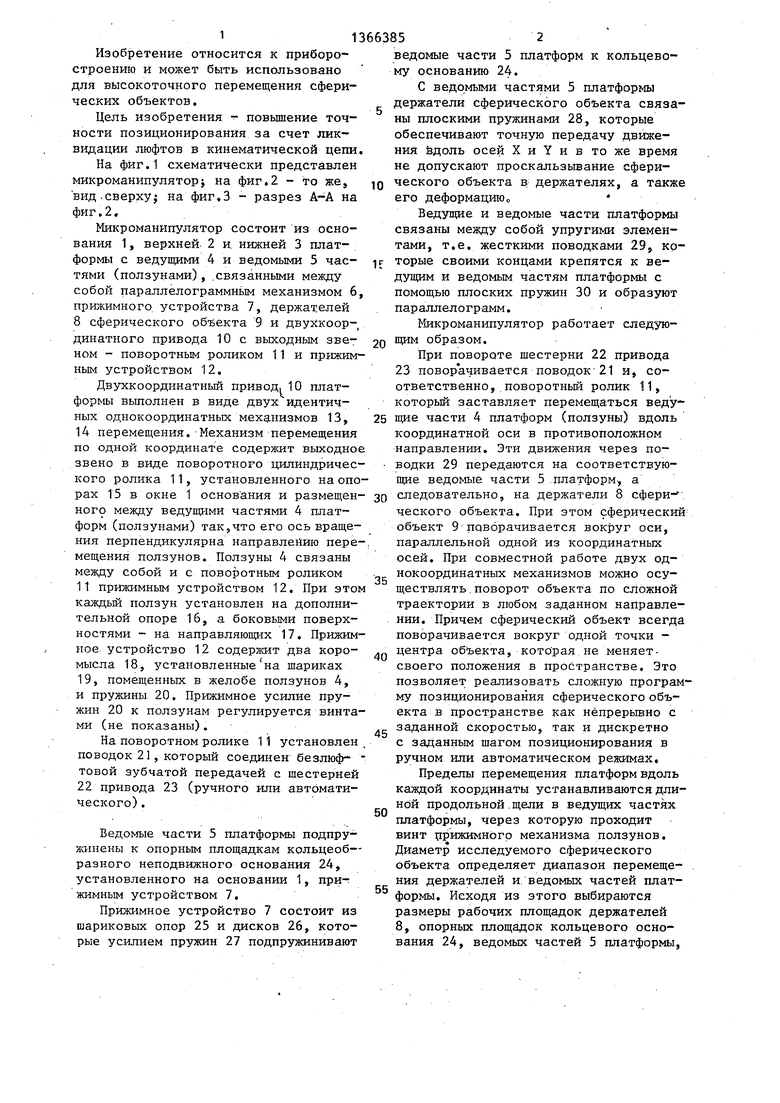

| название | год | авторы | номер документа |
|---|---|---|---|
| ВТУЛКА ВОЗДУШНОГО ВИНТА С АВТОМАТОМ ПЕРЕКОСА | 2018 |
|
RU2746024C2 |
| ДВУХКООРДИНАТНЫЙ МИКРОПОЗИЦИОНЕР | 2006 |
|
RU2306621C1 |
| ШАРНИР МАНИПУЛЯТОРА | 2005 |
|
RU2283217C1 |
| МИКРОФИЛЬМИРУЮЩИЙ АППАРАТ С КАССЕТАМИ | 2001 |
|
RU2201612C2 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2760516C1 |
| Приводной сферический шарнир | 1989 |
|
SU1646863A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ВОСПРОИЗВОДИМОЙ ДОЗИРОВАННОЙ КОНТУЗИОННОЙ ТРАВМЫ СПИННОГО МОЗГА У КРЫС | 2021 |
|
RU2755234C1 |
| УСТАНОВКА ИЗМЕРИТЕЛЬНАЯ УЛЬТРАЗВУКОВАЯ И МЕХАНОАКУСТИЧЕСКИЙ БЛОК ДЛЯ НЕЕ | 2007 |
|
RU2351926C2 |
| Устройство реверсивного поворота и фиксации планшайбы в двух заданных положениях | 1990 |
|
SU1745521A1 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
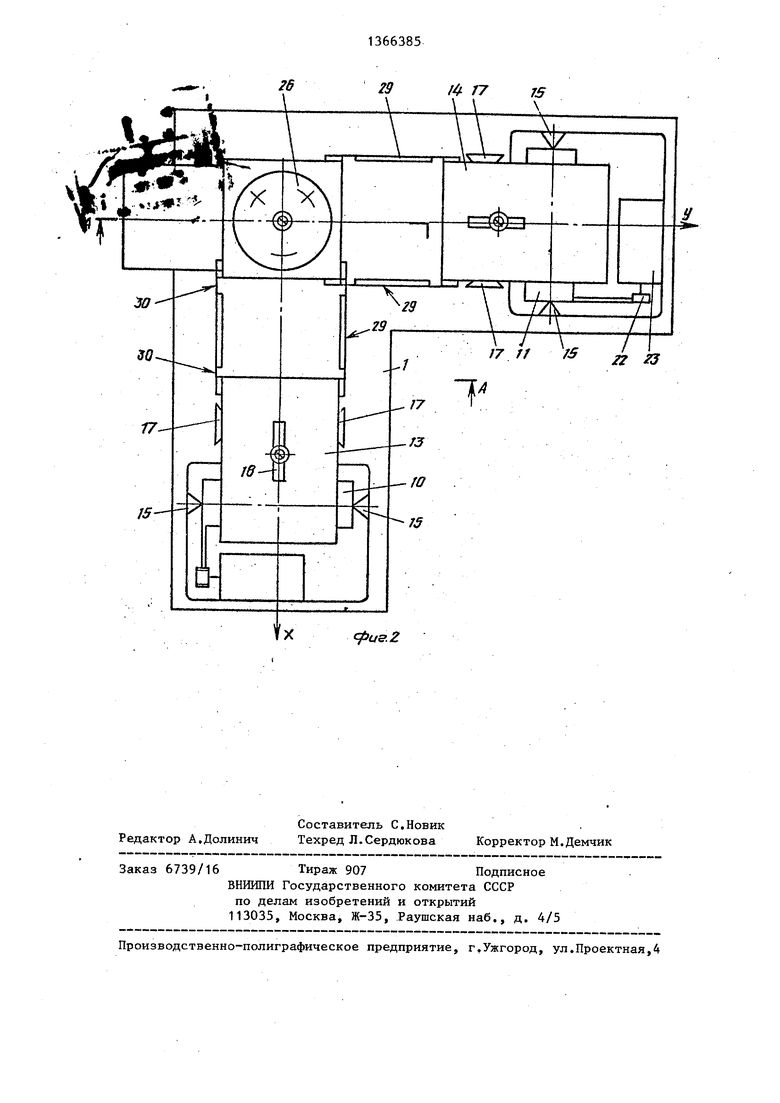
Изобретение относится к приборо строению и может быть использовано для высой оточного перемещения сферических объектов. Цель изобретения - повышение точности позиционирования за счет ликвидации люфтов в кинематических цепях. Цилиндрический ролик 11 поворачивается поводком 21 от шестерни 22 привода 23 и перемещает верхнюю платформу в одном направлении, а нижнюю - в противоположном. Эти перемещения через поводки передаются на соответствующие платформы двухкоординатного столика ориентации, а следовательно, на держатели 8 сферического объекта 9. При совместной работе двух однокоординатных механизмов перемещения осуществляется поворот объекта 9 в любом направлении по сложной траектории с заданной точностью, скоростью и шагом. В каждом из этих случаев сферический объект поворачивается вокруг своего центра, координаты которого остаются неизменными в пространстве. 3 ил. lO
/f
Фиг.1
cfujs.Z
| Morjes I.A., Weinstein B.W., Willenborg D.LO,, Richmond A.L, Mic- rosphere rotation for automated inter- ferometric target characterization UCRL-83379 | |||
| University of California | |||
| Lawzence Livermore Laboratory Preprint, Sept | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
