Изобретение относится к системам самонаведения летательных аппаратов (ЛА) на воздушные цели с использованием бортовых радиолокационных систем (БРЛС) и может использоваться для наведения самолетов и ракет на отдельную цель в составе плотной группы целей.
Известно несколько традиционных способов наведения ЛА на воздушные объекты: способ пропорционального наведения [Максимов М.В., Горгонов Г.И. Радиоэлектронные системы самонаведения - М.: Радио и связь, 1982, стр. 56] и способ пропорционального наведения со смещением угловой скорости линии визирования (ЛВ) [Максимов М.В., Горгонов Г.И. Радиоэлектронные системы самонаведения - М.: Радио и связь, 1982, стр. 59].
Сущность способа пропорционального наведения состоит в том, что измеряют значения скорости сближения ЛА с целью, угловых скоростей линии визирования и собственных ускорений в горизонтальной и вертикальной плоскостях, именуемых далее плоскостями управления, формируют сигналы управления ЛА в горизонтальной и вертикальной плоскостях по соотношениям:
где
Δ Г, Δ В - сигналы управления в этих плоскостях;
N01 - весовой коэффициент;
Vсб - значение скорости сближения ЛА с целью;
No - постоянный навигационный параметр, рассчитываемый из условия No ≥3, обеспечивающего траекторию полета ЛА, близкую к прямолинейной;
ω Г, ω В - значения угловых скоростей ЛВ в горизонтальной и вертикальной плоскостях;
jГ jВ - значения поперечных ускорений в горизонтальной и вертикальной плоскостях.
Следует отметить, что способ пропорционального наведения, определяемый соотношениями (1), оптимизирован на перехват не маневрирующих или слабо маневрирующих целей и при их интенсивном маневре выполняется с достаточно большими ошибками (промахами).
Способ пропорционального наведения со смещением угловой скорости ЛВ (прототип) заключается в том, что при формировании сигнала управления измеряют значения скорости сближения ЛА с целью, угловых скоростей ЛВ и собственных поперечных ускорений ЛА в горизонтальной и вертикальной плоскостях, причем в сигналы управления в горизонтальной и вертикальной плоскостях вводят дополнительные слагаемые, пропорциональные приращениям угловых скоростей ЛВ, вызванных маневром цели, так что алгоритм траекторного управления определяется соотношениями:


в которых:
Δ Г, Δ В - сигналы управления ЛА в горизонтальной и вертикальной плоскостях;
No1 - весовой коэффициент;
No - постоянный навигационный параметр;
Vcб - значение скорости сближения ЛА с целью, на которую он наводится;
ω Г, ω В - значения угловых скоростей ЛВ в горизонтальной и вертикальной плоскостях управления при отсутствии маневра цели;
Δ ω Г, Δ ω В - значения приращений угловой скорости ЛВ в горизонтальной и вертикальной плоскостях, обусловленные маневром цели.
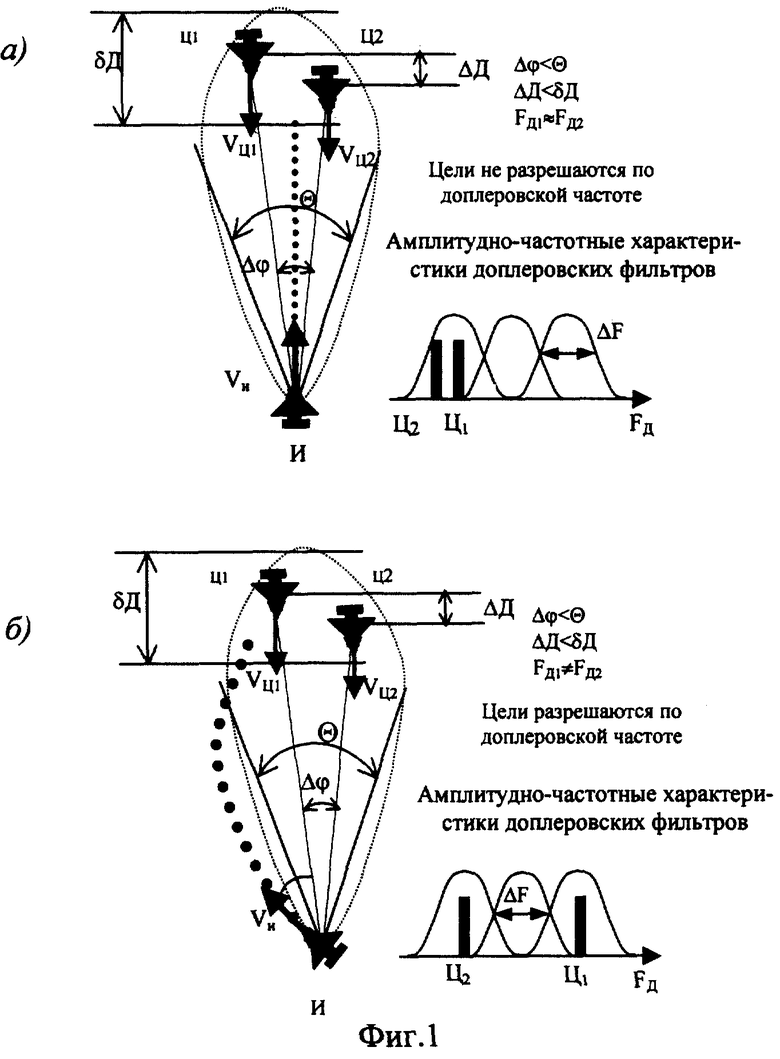
Недостатком обоих способов наведения является то, что они обеспечивают достаточно точное наведение лишь на одиночные воздушные цели, которые разрешаются (селектируются среди других целей) БРЛС. Если цели движутся в составе плотной группы и не разрешаются БРЛС ни по дальности, ни по скорости, ни по углам (см. фиг.1а), то при использовании этих способов ЛА будет наводиться на геометрический центр группы. В общем случае это приводит к промаху ЛА и не позволяет осуществить наведение на одну из целей в составе группы.
Задачей настоящего изобретения является наведение ЛА на отдельную воздушную цель, летящую в составе плотной группы не разрешаемых БРЛС целей, с одновременным их разрешением, с высокой точностью и минимальными затратами энергии на управление.
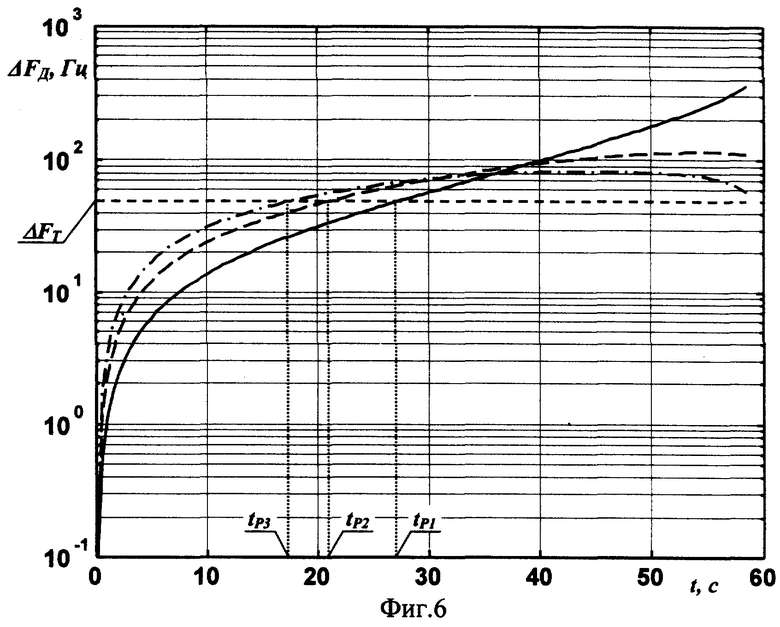
Сущность предлагаемого способа состоит в том, что полет наводимого ЛА выполняется по криволинейной траектории, на начальном участке которой появляются существенные различия доплеровских частот радиолокационных сигналов, отраженных от каждой цели, позволяющие разрешить их по скорости, а на конечном участке этой траектории он выводится на одну из выбранных целей (см. фиг.1,б). Полет по такой траектории дает возможность перейти от разрешения целей по угловым координатам, определяемого шириной θ диаграммы направленности, к их разрешению по доплеровским частотам (скорости), определяемому полосой пропускания Δ F фильтра доплеровских частот (фиг.1а, б).
Способ наведения ЛА на отдельную цель в составе плотной группы состоит в следующем:
измеряют значения дальности от ЛА до центра группы, скорость сближения с ней, угловые скорости ЛВ и собственные поперечные ускорения в горизонтальной и вертикальной плоскостях; формируют сигналы управления в этих плоскостях по соотношениям:

где
Δ Г, Δ В - сигналы управления в горизонтальной и вертикальной плоскостях;
No2 - весовой коэффициент;
ω Г, ω В - значения угловых скоростей ЛВ в горизонтальной и вертикальной плоскостях, измеряемые БРЛС;
Δ ω Г, Δ ω В - значения смещений угловых скоростей ЛВ в горизонтальной и вертикальной плоскостях;
JГ, jВ, - значения поперечных ускорений в горизонтальной и вертикальной плоскостях, а весовой коэффициент и смещение угловой скорости ЛВ определяют по соотношениям:

в которых:
Д и Vсб - соответственно измеренные значения дальности от летательного аппарата до центра группы и его скорости сближения с нею;
q11 - весовой коэффициент чувствительности к точности выдерживания требуемого линейного разрешения по углам в плоскостях управления;
q22 - весовой коэффициент чувствительности по промаху в процессе наведения на конкретную цель в группе;
kj - весовой коэффициент, ограничивающий величину сигнала управления;
λ - рабочая длина волны бортовой РЛС;
Δ F - полоса пропускания доплеровского фильтра;
Δ lТГ, Δ lТВ - значения требуемой линейной разрешающей способности по углам в горизонтальной и вертикальной плоскостях, определяемые интервалами между целями в группе (см. фиг.3).
На фиг.1а, б показано взаимное расположение и траектории полета наводимого объекта и группы из двух не разрешаемых БРЛС целей при использовании способа пропорционального наведения со смещением и заявляемого способа соответственно.
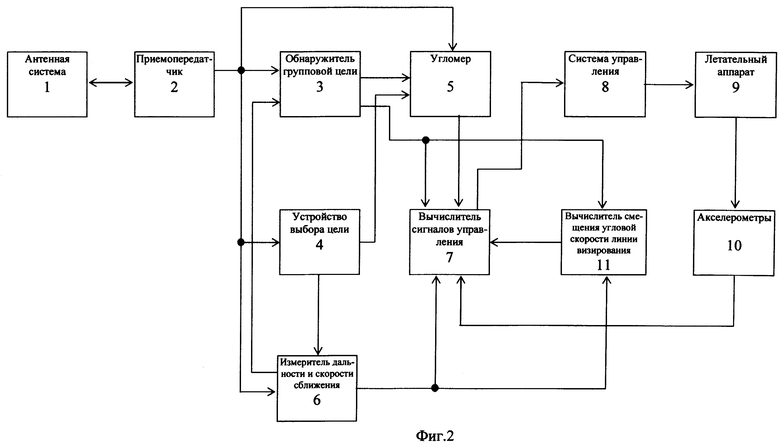
На фиг.2 представлена упрощенная структурная схема возможного варианта системы, реализующей заявленный способ наведения ЛА на отдельную воздушную цель в составе плотной группы.
Система содержит:
антенную систему БРЛС - 1;
приемопередатчик БРЛС - 2;
обнаружитель групповой цели - 3;
устройство выбора цели - 4;
угломер - 5;
измеритель дальности и скорости сближения - 6;
вычислитель сигналов управления - 7;
систему управления - 8;
летательный аппарат - 9;
акселерометры - 10;
вычислитель требуемого смещения угловой скорости ЛВ - 11.
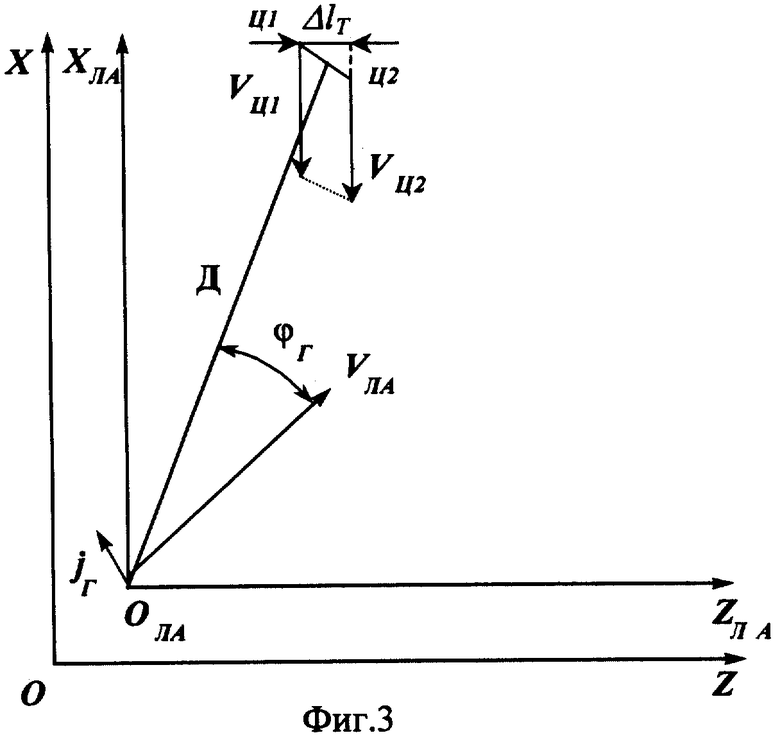
Фиг.3 поясняет геометрические соотношения между координатами абсолютных и относительных движений ЛА и группы, состоящей из двух близко расположенных целей Ц1 и Ц2 в горизонтальной плоскости.
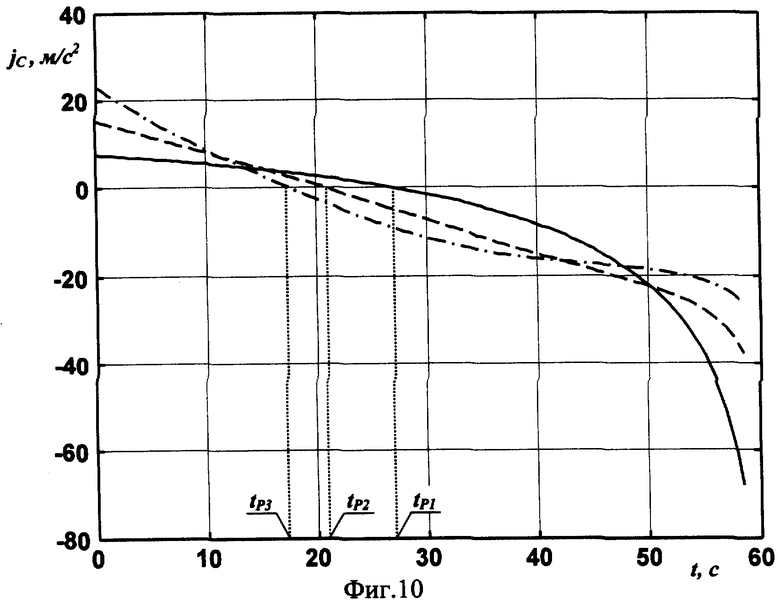
Фиг.4-11 иллюстрируют эффективность предлагаемого способа наведения с разрешением целей в плотной группе.
Рассмотрим один из возможных вариантов системы наведения ЛА на отдельную воздушную цель в составе плотной группы, элементы которой не разрешаются обычными приемами, при использовании заявляемого способа наведения (фиг.2).
Антенная система - 1 БРЛС осуществляет просмотр зоны ответственности, выполняет прием и пространственную селекцию сигналов (целей) за пределами элемента разрешения, определяемого значениями разрешающих способностей по угловым координатам, дальности и скорости сближения.
Отселектированные сигналы поступают в приемное устройство приемопередатчика - 2, выделяющее полезные сигналы на фоне шумов. При этом сигналы, отраженные от целей группы, находящихся внутри одного элемента разрешения, попадают в один доплеровский фильтр (фиг.1,а). С выхода приемной части приемопередатчика - 2 сигналы поступают в обнаружитель групповой цели - 3, устройство выбора цели - 4, угломер - 5 и измеритель дальности и скорости сближения - 6.
Если интервалы измеряемых углов, дальности и скорости сближения, определяемые параметрами выходного сигнала приемной части приемопередатчика - 2 не превышают ни одного соответствующего значения разрешающей способности по этим координатам, то обнаружитель групповой цели - 3 принимает решение об ее отсутствии (наличии одиночной цели) и в вычислителе сигналов управления - 7 формируется сигнал управления, соответствующий традиционному алгоритму пропорционального наведения со смещением ЛВ, определяемому соотношениями (2), (3). Если же эти интервалы превышают хотя бы одно из значений разрешающей способности по углам, дальности и скорости сближения, то в обнаружителе - 3 формируется сигнал наличия групповой цели, поступающий в вычислитель смещения угловой скорости ЛВ - 11 и в вычислитель сигналов управления - 7. В такой ситуации в вычислитель сигналов управления - 7 начинают поступать измеренные значения дальности и скорости из измерителя дальности и скорости - 6 и значения угловых скоростей линии визирования из угломера - 5, а также значения собственных поперечных ускорений ЛА в плоскостях управления, измеренных акселерометрами - 10.
Кроме того, из измерителя дальности и скорости - 6 в вычислитель смещения угловой скорости ЛВ - 11 начинают поступать измеренные значения дальности и скорости сближения и он начинает формировать сигналы смещения угловых скоростей ЛВ, определяемые соотношением (6), поступающие в вычислитель сигналов управления - 7, который формирует сигналы управления в вертикальной и горизонтальной плоскостях по алгоритмам (4)-(6), подаваемые в систему управления - 8. В системе управления - 8 осуществляется преобразование сигналов управления в отклонения рулевых органов, под действием которых ЛА изменяет свое пространственное положение, реализуя криволинейную траекторию полета, необходимую для получения желаемого линейного разрешения по углам в горизонтальной и вертикальной плоскостях (фиг.16).
Рассмотрим в динамике процедуру формирования сигнала управления для одной, например, горизонтальной плоскости при использовании заявленного способа.
На больших расстояниях, когда ω г ≈ 0 и в соотношениях (5) и (6) соответствующие слагаемые q22/(kjД) и q22Vсб/(q11Д) практически равны нулю, сигнал управления, формируемый по закону (4), определяется величиной смещения угловой скорости ЛВ, вычисляемой по правилу (6). В такой ситуации полет ЛА будет выполнятся по криволинейной траектории с постоянной угловой скоростью ω Г, обеспечивающей стабилизацию требуемого линейного разрешения по азимуту
где Δ F - полоса пропускания доплеровского фильтра приемника, λ -рабочая длина волны БРЛС, ω г - угловая скорость ЛВ в горизонтальной плоскости.
После того как в процессе полета ЛА реализовано требуемое линейное разрешение по азимуту и доплеровские частоты сигналов, отраженных от различных целей, попадут в различные фильтры (фиг.1,б), по количеству фильтров, на выходе которых появляются сигналы, определяется количественный состав группы, а в устройстве выбора цели - 4 по известным правилам [Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления, ч.1, ч.2 - М.: Радио и связь, 1997, стр.314, 315] осуществляется выбор одиночной цели для поражения (наиболее близкой, наиболее скоростной и т.д.), за которой известным образом выполняется автоматическое слежение по дальности [Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления, ч.1, ч.2 - М.: Радио и связь, 1997, стр.227-234], скорости [Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления, ч.1, ч.2 - М.: Радио и связь, 1997, стр.234-240] и направлению [Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления, ч.1, ч.2 - М.: Радио и связь, 1997, стр.268-280] с соответствующим формированием измеренных значений дальности до нее, скорости сближения с ней, ее бортовых пеленгов и угловых скоростей ЛВ в плоскостях управления с сохранением закона управления, определяемого соотношениями (4)-(6), обеспечивающего разрешение целей по доплеровской частоте.
По мере уменьшения дальности до цели и увеличения ω Г начинает возрастать влияние второго слагаемого в весовом коэффициенте, определяемом соотношением (5), и уменьшаться значение сигнала смещения угловой скорости ЛВ, рассчитываемого по формуле (6). По мере уменьшения дальности влияние этого процесса усиливается. Следовательно, по мере приближения ЛА к цели происходит автоматическое перераспределение влияния ошибок наведения по смещению угловой скорости ЛВ, обеспечивающему стабилизацию необходимого линейного разрешения по азимуту в соответствии с соотношением (7) на начальном участке траектории, к ошибке по угловой скорости, обеспечивающей минимизацию текущего промаха [Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления, ч.1, ч.2 - М.: Радио и связь, 1997, стр. 183]
на конечном участке.
В соотношении (8) hГ - текущей промах ЛА в горизонтальной плоскости, V0 - относительная скорость, ω Г - угловая скорость ЛВ в горизонтальной плоскости.
Формирование сигналов управления в вертикальной плоскости проходит аналогичным образом.
Следует подчеркнуть, что в заявляемом способе по мере приближения ЛА к цели (уменьшению дальности) увеличивается чувствительность системы к текущему промаху (угловой скорости ЛВ). Кроме того, начиная с некоторой дальности ДР до целей, они начинают разрешаться по азимуту за счет ширины диаграммы направленности, поскольку линейное разрешение по углу определяется соотношением (см. фиг.1,а)
Δ lр=Дθ ,
в котором Д - дальность до цели, а θ - ширина диаграммы направленности антенны.
На фиг.1,а,б показаны взаимное расположение, направление и траектории полета (пунктирной линией) наводимого ЛА (И) и группы из двух не разрешаемых целей Ц1 и Ц2 при использовании метода пропорционального наведения со смещением (фиг.1,а) и заявляемого способа (фиг.1,6). При этом фиг.1,а соответствует полету целей Ц1 и Ц2 с одинаковыми скоростями VЦ1 и VЦ2 в ситуации, при которой дистанция Δ Д между целями, угол Δ ϕ между ними не превышают соответствующих значений разрешающих способностей по дальности δ Д и углам θ . При траектории полета, показанной на фиг.1,а, доплеровские частоты сигналов, отраженных от целей Ц1 и Ц2, примерно равны (FД1 ≈FД2) и попадают в один доплеровский фильтр. В результате цели Ц1 и Ц2 не разрешаются ни по дальности, ни по углам, ни по скорости (доплеровской частоте) и наведение осуществляется на геометрический центр группы.
При использовании заявляемого способа наведения полет осуществляется по криволинейной траектории (см. фиг.1,б). В такой ситуации разность доплеровских частот сигналов, отраженных от целей Ц1 и Ц2, становится значительной, превышая полосу пропускания доплеровских фильтров. Эти сигналы попадают в разные фильтры, цели разрешаются по доплеровской частоте (скорости сближения), становится возможным их раздельное наблюдение с последующим наведением на одну из них.
Геометрические соотношения между координатами абсолютного и относительного движения ЛА и группой, состоящей из двух близкорасположенных и неразрешаемых целей Ц1 и Ц2, в горизонтальной плоскости при использовании заявляемого способа показаны на фиг.3, на которой:
XOZ - земная, невращающаяся система координат;
ХЛА ОЛА ZЛА - подвижная система координат, связанная с центром масс Ола наводимого ЛА, движущегося со скоростью VЛА;
Ц1 и Ц2 - точки текущего расположения целей, на которые наводится ЛА, движущихся со скоростями VЦ1 ≈VЦ2 с интервалом Δ lТ между ними;
Д - дальность до геометрического центра групповой цели, измеряемая БРЛС до момента разрешения целей;
ϕ Г - бортовой пеленг геометрического центра группы в горизонтальной плоскости, измеряемый БРЛС до момента разрешения целей по доплеровской частоте;
jГ - поперечное ускорение ЛА в горизонтальной плоскости.
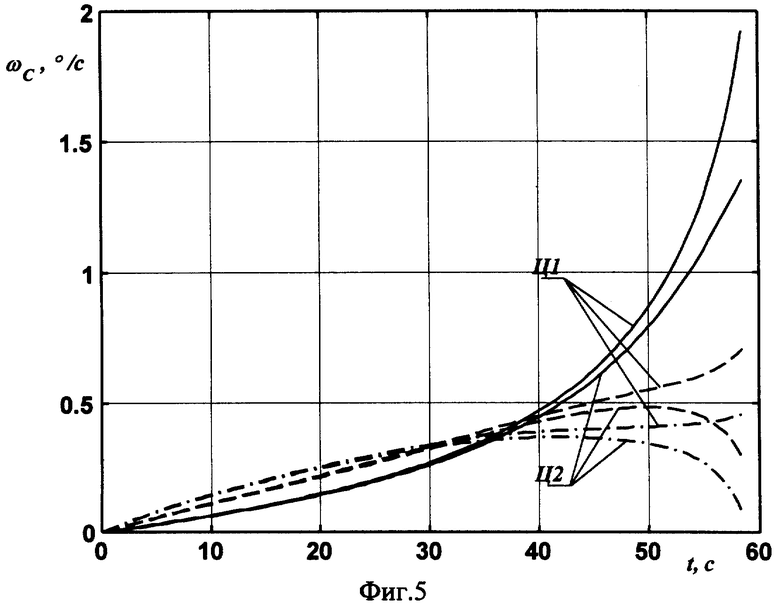
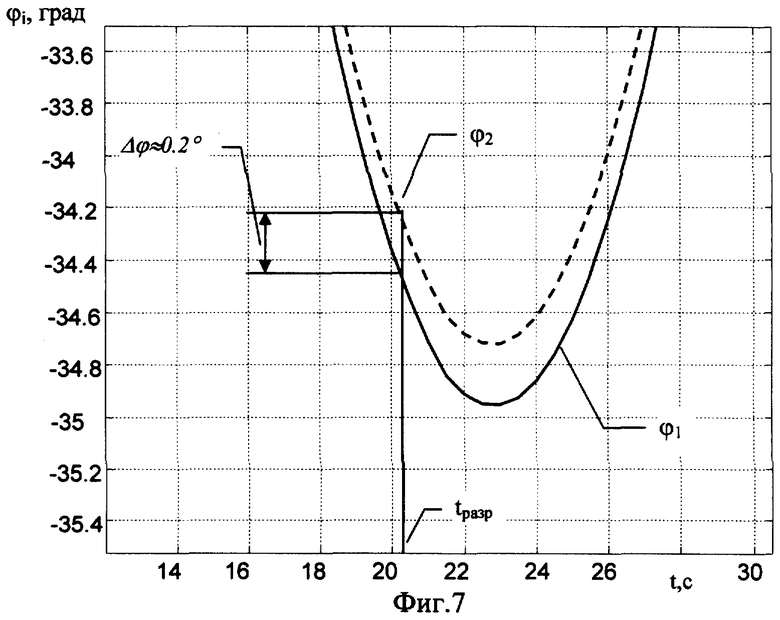
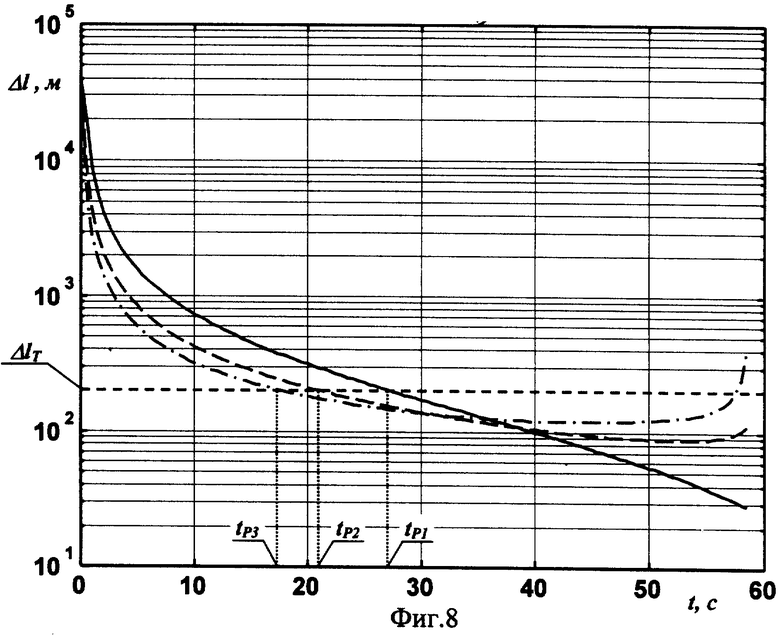
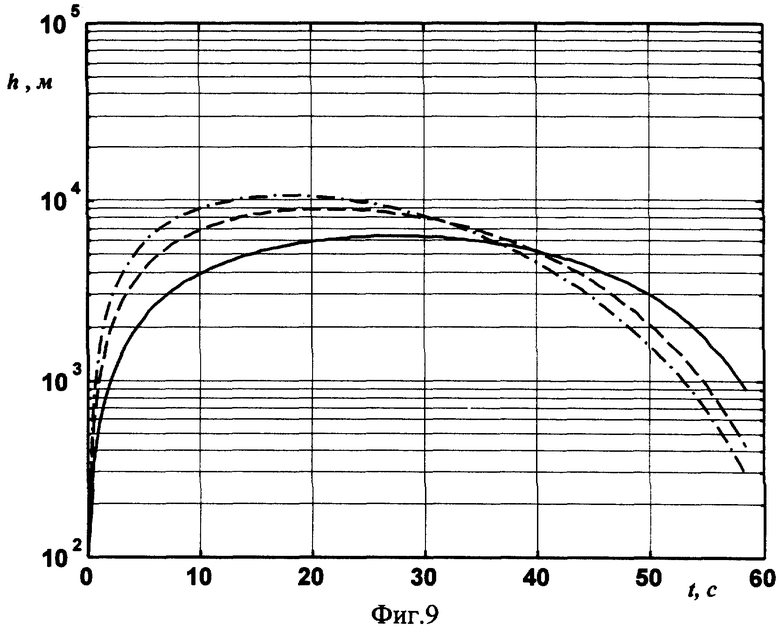
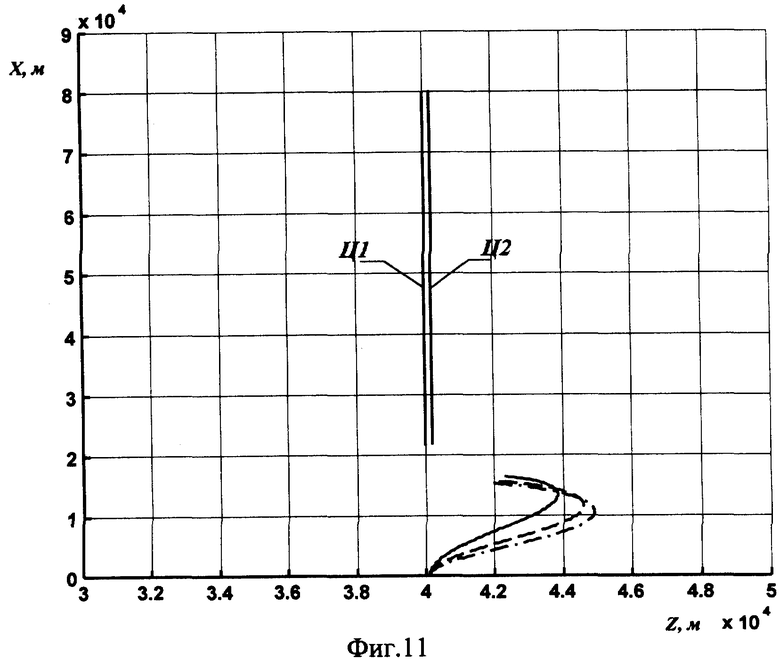
Исследования заявляемого способа наведения, проведенные с помощью имитационного моделирования, подтвердили его высокую эффективность. На фиг.4-11 приведены результаты одного из вариантов исследований для ситуации, когда λ =0,03 м, Δ F=50 Гц, Δ lT=200 м, θ =3° , а маневр ЛА выполняется в горизонтальной плоскости. При этом на фиг.4-10 показаны соответственно эволюции дальности, угловых скоростей ЛВ целей Ц1 и Ц2, разности Δ FД доплеровских частот сигналов, отраженных от целен Ц1 и Ц2, текущих бортовых пеленгов целей ϕ 1 и ϕ 2, текущего линейного разрешения по азимуту Δ 1, текущего промаха h и поперечного ускорения ЛА j, а на фиг.11 траектория полета ЛА и целей Ц1 и Ц2 в процессе наведения при условии, что для поражения выбрана цель Ц2 и используются различные значения весового коэффициента q11, определяющего чувствительность алгоритма траекторного управления к точности выдерживания требуемого линейного разрешения по углу в горизонтальной плоскости.
Проведенные исследования, подтвердившие работоспособность заявляемого способа наведения на отдельную воздушную цель в составе плотной группы, дают возможность сделать следующие выводы.
Заявляемый способ наведения позволяет после обнаружения групповой цели обеспечить полет ЛА по траектории, на начальном участке которой реализуются требуемые линейные разрешения по азимуту и углу места, дающие возможность разрешать цели в группе и определять ее количественный состав, а на конечном минимизировать текущий промах в процессе наведения на одну из целей в составе группы.
Предложенный способ позволяет решать поставленные задачи в диапазоне реальных ограничений на величины угловых скоростей ЛВ и поперечных ускорений ЛА.
Использование заявляемого способа не накладывает никаких дополнительных ограничений на состав измерителей, элементную базу, объем памяти и быстродействие бортовых вычислителей.
Литература
1. Черняк B.C. Многопозиционная радиолокация. - М.: Радио и связь, 1993 г.
2. Саблин В.Н., Викулов О.В., Меркулов В.И. Авиационные многопозиционные радиолокационные системы многоканального наведения. Разведывательно-ударные комплексы. - Зарубежная радиоэлектроника, Успехи современной радиоэлектроники. 1998 г., №9.
3. Джонсон Д.Х. Применение методов спектрального оценивания к задачам определения угловых координат источников излучения. - ТИИЭР, 1982 г., т.70, №9.
4. Дрогалин В.В., Меркулов В.И., Родзивилов В.А., Федоров И.Б., Чернов М.В. Алгоритмы оценивания угловых координат источников излучения, основанные на методах спектрального анализа. - Зарубежная радиоэлектроника, Успехи современной радиоэлектроники. 1998 г., №2.
5. Григорьев Ф.Н., Кузнецов Н.А., Серебровский Л.П. Управление наблюдением в автоматических системах. - М.: Наука, 1986 г.
6. Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления, ч.1 - М.: Радио и связь, 1997 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНДИВИДУАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ВОЗДУШНУЮ ЦЕЛЬ В СОСТАВЕ ПЛОТНОЙ ГРУППЫ | 2020 |
|
RU2742626C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2012 |
|
RU2525650C2 |
| СПОСОБ ПРИВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА К НАЗЕМНОМУ ОБЪЕКТУ | 2012 |
|
RU2521890C2 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ИНТЕНСИВНО МАНЕВРИРУЮЩУЮ ВОЗДУШНУЮ ЦЕЛЬ | 2004 |
|
RU2254542C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ИСТРЕБИТЕЛЕМ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ ПРИ ЕГО БЛИЖНЕМ НАВЕДЕНИИ НА ГРУППОВУЮ ВОЗДУШНУЮ ЦЕЛЬ | 2015 |
|
RU2593911C1 |
| СПОСОБ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ГИПЕРЗВУКОВЫЕ ЦЕЛИ | 2009 |
|
RU2408847C1 |
| СПОСОБ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2148235C1 |
| ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА БЕСПИЛОТНОГО САМОЛЕТА-ИСТРЕБИТЕЛЯ | 2010 |
|
RU2418267C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2164654C2 |
| СПОСОБ КОМАНДНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ | 2009 |
|
RU2408846C1 |

Изобретение относится к системам самонаведения. Способ наведения летательного аппарата на отдельную воздушную цель в составе плотной группы не разрешаемых бортовой РЛС целей позволяет за счет соответствующего искривления траектории его полета получить на начальном участке разрешение целей по доплеровской частоте (скорости сближения) с определением количественного состава группы с последующим высокоточным наведением на одну из целей как в режиме ее непрерывной пеленгации, так и в режиме одновременного автоматического сопровождения всех целей группы. Возможность разрешения целей в плотной группе обусловлена переходом от их разрешения по углам за счет ширины диаграммы направленности антенны РЛС к разрешению по доплеровским частотам, предопределяющему так называемое доплеровское обострение луча антенны. 11 ил.
Способ наведения летательного аппарата на отдельную воздушную цель в составе плотной группы, заключающийся в том, что измеряют значения дальности от летательного аппарата до группы целей, скорость сближения с ней, угловые скорости линии визирования, собственные поперечные ускорения в горизонтальной и вертикальной плоскостях и формируют сигналы управления летательным аппаратом в горизонтальной и вертикальной плоскостях по соотношениям
ΔГ=N02(ωГ+ΔωГ)-jГ,
ΔВ=N02(ωВ+ΔωВ)-jВ,
где ΔГ, ΔВ - сигналы управления в горизонтальной и вертикальной плоскостях;
N02 - весовой коэффициент;
ωГ, ωВ - значения угловых скоростей линии визирования в горизонтальной и вертикальной плоскостях, измеряемые бортовой РЛС;
ΔωГ, ΔωВ - значения смещений угловых скоростей линии визирования в горизонтальной и вертикальной плоскостях; jГ, jВ - значения поперечных ускорений летательного аппарата в горизонтальной и вертикальной плоскостях,
отличающийся тем, что весовой коэффициент и требуемое смещение угловой скорости определяют по соотношениям
в которых Д и Vcб - соответственно измеренные значения дальности от летательного аппарата до групповой цели и его скорости сближения с нею;
q11 - весовой коэффициент чувствительности к точности выдерживания требуемого линейного разрешения по углам в горизонтальной и вертикальной плоскостях;
q22 - весовой коэффициент чувствительности к промаху в процессе наведения на конкретную цель в группе;
kj - весовой коэффициент, ограничивающий величину сигналов управления;
λ - рабочая длина волны бортовой РЛС;
ΔF - полоса пропускания доплеровского фильтра;
Δ1ТГ, Δ1ТВ - значения требуемой линейной разрешающей способности по углам в горизонтальной и вертикальной плоскостях, определяемые интервалами между целями в группе.
| МАКСИМОВ М.В., ГОРГОНОВ Г.И | |||
| Радиоэлектронные системы самонаведения | |||
| М.: Радио и связь, 1982, с.58, 59 | |||
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЦЕЛЬ | 2001 |
|
RU2204785C2 |
| Ягодное желе "Компоте" | 2017 |
|
RU2688055C1 |
| DE 3131089 A1, 03.03.1983. | |||

