Изобретение относится к способам наведения летательного аппарата (ЛА) на воздушную цель (ВЦ) и может быть использовано при создании новых и модернизации существующих систем наведения ЛА на воздушные цели.
Известен способ наведения ЛА на ВЦ [1], который состоит в том, что на ЛА задают метод наведения ЛА на ВЦ, с помощью бортовых средств принимают излучение от ВЦ, измеряют координаты ВЦ относительно ЛА и производные этих координат, являющиеся ошибками наведения ЛА на ВЦ при заданном методе наведения, и в зависимости от этих ошибок создают управляющие воздействия, которые изменяют траекторию движения ЛА таким образом, чтобы ликвидировать ошибки наведения ЛА на ВЦ. Недостатком этого способа являются сравнительно небольшие дальности между ЛА и ВЦ, на которых его можно использовать, ограниченные дальностью действия приемников излучения от ВЦ, установленных на ЛА.
Известен также способ наведения ЛА на ВЦ [2], который состоит в том, что с неподвижного относительно Земли пункта управления (НПУ) облучают ВЦ и ЛА радиолокационным излучением, на НПУ принимают радиолокационное излучение, отраженное от ЛА и ВЦ, в результате обработки принятого излучения измеряют значения дальностей от НПУ до ВЦ и от НПУ до ЛА, а также значения углов азимута и углов места направлений с НПУ на ВЦ и с НПУ на ЛА, вводят измеренные значения в вычислитель НПУ, отображают местоположения ЛА и ВЦ на экранах мониторов рабочих мест лиц боевого расчета НПУ, экстраполируют траекторию движения ВЦ, вычисляют параметры требуемой траектории полета ЛА при наведении ЛА на ВЦ, формируют необходимые команды для обеспечения полета ЛА по этой траектории, передают эти команды на ЛА по радиолинии, принимают эти команды на ЛА и создают на ЛА соответствующие этим командам управляющие воздействия, которые изменяют траекторию полета ЛА таким образом, чтобы ликвидировать ее отклонения от требуемой траектории. Недостатком этого способа является большое количество и высокая стоимость вычислительных устройств, используемых на НПУ, обусловленные большим объемом вычислительных операций, которые необходимо выполнять на НПУ при автоматическом методе первичной и вторичной обработки радиолокационной информации, содержащейся в принимаемом на НПУ радиолокационном излучении, отраженном от ВЦ и ЛА.
Прототипом заявляемого изобретения следует считать способ наведения ЛА на ВЦ [2], общими признаками которого с заявляемым изобретением является то, что с НПУ облучают ВЦ, на НПУ принимают излучение, отраженное от ВЦ, в результате обработки принятого излучения измеряют значение дальности от НПУ до ВЦ, а также значения угла азимута и угла места направления с НПУ на ВЦ, вводят измеренные значения в вычислитель, установленный на НПУ, и создают на ЛА управляющие воздействия, которые изменяют траекторию полета ЛА.
Кроме того, в прототипе с НПУ облучают также ЛА, причем радиолокационным излучением, на НПУ принимают излучение, отраженное от ЛА, в результате обработки принятого излучения измеряют значение дальности от НПУ до ЛА, а также значения угла азимута и угла места направления с НПУ на ЛА, отображают местоположения ЛА и ВЦ на экранах мониторов рабочих мест лиц боевого расчета НПУ, вычисляют параметры требуемой траектории полета ЛА при наведении ЛА на ВЦ, формируют необходимые команды для обеспечения полета ЛА по этой траектории, передают эти команды на ЛА по радиолинии и принимают эти команды на ЛА, причем управляющие воздействия, создаваемые на ЛА, соответствуют этим командам, а изменения траектории полета ликвидируют отклонения траектории полета ЛА от требуемой траектории.
Недостатком этого способа является большое количество и высокая стоимость вычислительных устройств, используемых на НПУ, обусловленные большим объемом вычислительных операций, которые необходимо выполнять на НПУ при автоматическом методе первичной и вторичной обработки радиолокационной информации (РЛИ), содержащейся в принимаемом на НПУ радиолокационном излучении, отраженном от ВЦ и ЛА. Большой объем этих операций обусловлен большим количеством сложных задач, которые необходимо решать в процессе выполнения этих видов обработки РЛИ. Так, при автоматическом методе первичной обработки РЛИ решаются следующие задачи: 1) преобразование напряжения на выходе приемного устройства радиолокационной станции (РЛС) НПУ в дискретную величину, выраженную в двоичном коде: 2) обнаружение сигналов от ВЦ и ЛА на фоне помех; 3) измерение координат ВЦ и ЛА относительно НПУ. При автоматическом методе вторичной обработки РЛИ необходимо решать следующие задачи: 1) стробирование, которое состоит в выделении областей вероятного нахождения ВЦ и ЛА в следующем цикле обзора пространства РЛС; 2) расчет параметров полета ВЦ и ЛА на основе информации о их координатах, полученных в предыдущих циклах обзора пространства РЛС, с использованием интерполяции параметров движения ВЦ и ЛА; 3) экстраполяция координат ВЦ и ЛА за пределы интервала наблюдений; 4) сличение, которое состоит в сравнении координат отметок от объектов, попавших в строб, и селекции одной из них для продолжения траектории объекта. При решении этих задач используются сложные методы оценивания, фильтрации, интерполяции, экстраполяции, определения плотности вероятности случайных величин и т.д. Большое количество указанных сложных задач, использование сложных методов, обеспечивающих решение этих задач с достаточной точностью и достоверностью, и необходимость решения этих задач как для ВЦ, так и для ЛА требуют выполнения на НПУ большого объема вычислительных операций. Это обуславливает большое количество вычислительных устройств, которые необходимо использовать на НПУ при первичной и вторичной обработке РЛИ, и высокую стоимость этих устройств.
Целью заявляемого изобретения является устранение указанного недостатка прототипа, а именно уменьшение количества и снижение стоимости вычислительных устройств, используемых на НПУ, за счет уменьшения объема вычислительных операций, которые нужно выполнять на НПУ при первичной и вторичной обработке излучения, принятого на НПУ.
Для достижения этой цели в заявляемом изобретении предварительно в вычислитель НПУ вводят значения географических координат и высоты над уровнем моря местоположения НПУ, а также значения параметров референц-эллипсоида Земли. Значения параметров референц-эллипсоида предварительно вводят также в вычислитель ЛА и на ЛА задают метод его наведения на ВЦ. Предварительно с НПУ на ЛА передают по радиолинии значения географических координат и высоты над уровнем моря местоположения НПУ. В процессе наведения с НПУ облучают ВЦ, на НПУ принимают излучение, отраженное от ВЦ, и в результате обработки принятого излучения измеряют значение дальности от НПУ до ВЦ и значения углов азимута и места направления с НПУ на ВЦ. Измеренные значения вводят в вычислитель НПУ и вычисляют приращения географических координат и высоты над уровнем моря местоположения ВЦ над местоположением НПУ, а также значения скоростей изменения географических координат и высоты над уровнем моря местоположения ВЦ. Вычисленные значения приращений и скоростей передают по радиолинии на ЛА, где их принимают, измеряют значения географических координат и высоты над уровнем моря местоположения ЛА, а также значения скоростей изменения этих координат и высоты, вводят принятые и измеренные значения в вычислитель ЛА, вычисляют значения ошибок наведения ЛА на ВЦ, соответствующих заданному методу наведения, и создают управляющие воздействия, которые изменяют траекторию полета ЛА таким образом, чтобы ликвидировать эти ошибки наведения.
Сущность предлагаемого способа поясняется схемами, изображенными на фиг. 1-3. На фиг.1 показана пространственная схема положения ВЦ относительно НП, где обозначено: П - точка местоположения НПУ; Ц - точка местоположения ВЦ; СЮ - касательная в точке П к географическому меридиану, проходящему через точку П; ВЗ - касательная в точке П к географической параллели, проходящей через точку П; Ац - угол азимута направления из точки П в точку Ц; Мц - угол места направления из точки П в точку Ц;  вектор дальности ВЦ от НПУ;
вектор дальности ВЦ от НПУ;  вектор угловой скорости изменения угла Ац;
вектор угловой скорости изменения угла Ац;  вектор угловой скорости изменения угла Мц;
вектор угловой скорости изменения угла Мц;  вектор скорости изменения вектора
вектор скорости изменения вектора  по модулю;
по модулю;  вектор скорости движения ВЦ относительно НПУ, вызванного вращением вектора Дцн с угловой скоростью
вектор скорости движения ВЦ относительно НПУ, вызванного вращением вектора Дцн с угловой скоростью  вектор скорости движения ВЦ относительно НПУ, вызванного вращением вектора
вектор скорости движения ВЦ относительно НПУ, вызванного вращением вектора  с угловой скоростью
с угловой скоростью  вектор скорости движения ВЦ относительно НПУ в плоскости Пц, проходящей через точку Ц и параллельной плоскости, в которой находятся прямые СЮ и ВЗ;
вектор скорости движения ВЦ относительно НПУ в плоскости Пц, проходящей через точку Ц и параллельной плоскости, в которой находятся прямые СЮ и ВЗ;  вектор скорости движения ВЦ относительно НПУ в плоскости, проходящей через точку Ц перпендикулярно плоскости Пц;
вектор скорости движения ВЦ относительно НПУ в плоскости, проходящей через точку Ц перпендикулярно плоскости Пц;  проекция суммы векторов Vцм и Vдц на плоскость Пц; dАц - угол ориентации вектора
проекция суммы векторов Vцм и Vдц на плоскость Пц; dАц - угол ориентации вектора  относительно вектора Vдмц; С1Ю1 - прямая в плоскости Пц, параллельная прямой СЮ; В1З1 - прямая в плоскости Пц, параллельная прямой ВЗ.
относительно вектора Vдмц; С1Ю1 - прямая в плоскости Пц, параллельная прямой СЮ; В1З1 - прямая в плоскости Пц, параллельная прямой ВЗ.
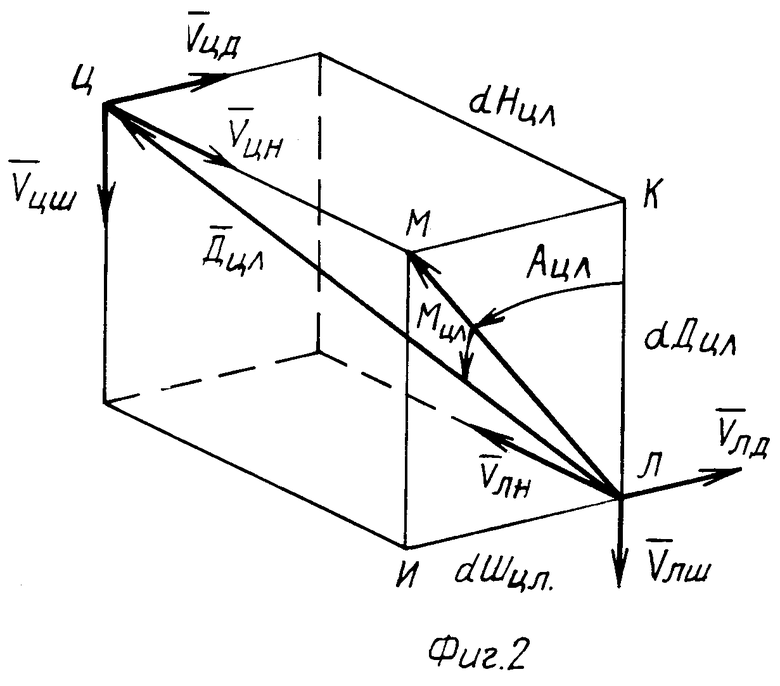
На фиг. 2 показана пространственная схема положения ВЦ относительно ЛА, где обозначено: Л - точка местоположения ДА; Ц - точка местоположения ВЦ; dШцл, dДцл, dНцл - приращения соответственно географической широты, географической долготы и высоты над уровнем моря местоположения ВЦ относительно местоположения ЛА;  вектор дальности между ВЦ и ЛА; Ацл - угол ориентации вектора
вектор дальности между ВЦ и ЛА; Ацл - угол ориентации вектора  относительно земного меридиана, который проходит через точку Л; Мцл - угол ориентации вектора
относительно земного меридиана, который проходит через точку Л; Мцл - угол ориентации вектора  относительно плоскости ИМКЛ, параллельной плоскости, которая касается референц-эллипсоида Земли в точке, являющейся проекцией точки Л на поверхность этого эллипсоида;
относительно плоскости ИМКЛ, параллельной плоскости, которая касается референц-эллипсоида Земли в точке, являющейся проекцией точки Л на поверхность этого эллипсоида;  скорости изменения географических координат и высот над уровнем моря соответственно точек Ц и Л.
скорости изменения географических координат и высот над уровнем моря соответственно точек Ц и Л.
На фиг. 3 показана структурная схема возможного варианта устройства, реализующего предложенный способ. Пунктирными линиями ограничены элементы устройства, находящиеся на НПУ и на ЛА. В каждом элементе, имеющем более одного входа или выхода, цифрами обозначены номера соответствующих входов и выходов. На фиг.3 обозначено: 1 - РЛС обнаружения ВЦ; 2 - радиолокационный высотомер (РЛВ); 3 - вычислитель (В) НПУ; 4 - передатчик (ПРД) радиолинии; 5 - приемник (ПРМ) радиолинии; 6 - приемник системы спутниковой навигации (ПССН); 7 - вычислитель (В) ЛА; ГШн, ГДн, Нн - значения географической широты, географической долготы и высоты над уровнем моря местоположения НПУ; Ац - угол азимута направления от НПУ на ВЦ; Мц - угол места направления от НПУ на ВЦ; Дцн - вектор дальности ВЦ от НПУ; Ар, Ер - заданные значения параметров референц-эллипсоида Земли; dГШц, dГДц, dHц - значения превышений географических широты и долготы, а также высоты над уровнем моря местоположения ВЦ относительно местоположения НПУ; Vцш, Vцд, Vцн - значения соответствующих скоростей движения ВЦ; ГШл, ГДл, Нл - значения географической широты, географической долготы и высоты над уровнем моря местоположения ЛА; Vлш, Vлд, Vлн - значения соответствующих скоростей полета ЛА; Опг, (Опрг) - значения ошибки наведения ЛА на ВЦ методом "погони" (параллельного сближения) в горизонтальной плоскости; Опв, (Опрв) - значения ошибки наведения ЛА на ВЦ методом "погони" (параллельного сближения) в вертикальной плоскости.
Сущность предлагаемого способа состоит в следующем. Предварительно в память вычислителя НПУ вводят: а) заданные значения географической широты ГШн, географической долготы ГДн и высоты Нн над уровнем моря местоположения НПУ; б) заданные значения параметров Ар и Ер референц-эллипсоида Земли. Заданные значения параметров Ар и Ер референц-эллипсоида Земли предварительно вводят также в память вычислителя ЛА. При входе ЛА в пределы зоны действия радиосредств НПУ с НПУ по радиолинии передают на ЛА значения ГШн, ГДн и Нн. При входе ВЦ в пределы зоны действия облучателя НПУ на НПУ принимают излучение, отраженное от ВЦ, и в результате обработки принятого излучения измеряют значения координат местоположения ВЦ относительно НПУ в текущий момент времени t: дальности Дцн(t) от НПУ до ВЦ, а также угла азимута Ац(t) и угла места Mц(t) направления с НПУ на ВЦ. С использованием этих измеренных значений вычисляют на НПУ текущие значения превышений географических широты dГШц(t) и долготы dГДц(t), а также высоты над уровнем моря dHц(t) местоположения ВЦ относительно местоположения НПУ и текущие значения скоростей Vцш(t), Vцд(t), Vцн(t) ВЦ, которые вычисляют по формулам, полученным в результате анализа схемы (фиг.1)

dНц(t) = Дцн(t)•sinМц(t); (3)
Vцш(t) = Vцг(t)•cos[Ац(t) - dАц(t)]; (4)
Vцд(t) = Vцг(t)•sin[Ац(t) - dАц(t)]; (5)
Vцн(t) = Vцм(t)•cosМ(t) + Vцд(t)•sinМ(t), (6)
где
Vдмц(t) = Vцд(t)•cosМц(t) - Vцн•sinМц(t); (8)

dАц(t) = arcsin[Vца(t)/Vцг(t)]; (11)



dt - заданный интервал времени между соседними измерениями величин Дцн(t), Aц(t) и Мц(t).
Вычисленные значения dГШц(t), dГДц(t), dHц(t), Vцш(t), Vцд(t), Vцн(t) передают с НПУ на ЛА и принимают эти значения на ЛА. На ЛА устанавливают ПССН и с его помощью измеряют значения географических широты ГШл(t) и долготы ГДл(t), а также высоты над уровнем моря Нл(t) местоположения ЛА и значения скоростей Vлш(t), Vлд(t), Vлн(t) полета ЛА. С использованием принятых на ЛА значений dГШц(t), dГДц(t), dHц(t), ГШн, ГДн, Нн, измеренных значений ГШл(t), ГДл(t), Нл(t) и предварительно введенных в вычислитель ЛА значений Ар, Ер на ЛА вычисляют значения дальности Дцл(t) между ВЦ и ЛА и углов ориентации вектора Дцл(t) в плоскости КМИЛ (угол азимута Ацл(t)) и относительно этой плоскости (угол места Mцл(t)) по формулам, которые получены в результате анализа схемы (фиг.2) при условии пренебрежения криволинейностью сторон рассматриваемого на этой схеме параллелепипеда
Ацл(t) = arcsin[dДцл(t) / Дцлп(t)]; (17)
Мцл(t) = arcsin[dНцл(t) / Дцл(t)], (18)
где
dШцл(t) = [ГШн + dГШц(t) - ГШл(t)]•Rз(ГШл(t))• cos(ГДл(t)); (19)
dДцл(t) = [ГДн + dГДц(t) - ГДл(t)]•Rз(ГШл(t)); (20)
dНцл(t) = Нн + dНц(t) - Нл(t); (21)

С использованием принятых на ЛА значений Vцш(t). Vцд(t), Vцн(t) и измеренных значений Vлш(t), Vлд(t), Vлн(t) на ЛА вычисляют значения модуля Vцл(t) вектора Vцл(t) скорости ВЦ относительно ЛА и углов ориентации вектора Vцл(t) в плоскости КМИЛ (угол азимута Аvцл(t)) и относительно этой плоскости (угол места Мvцл(t)) по формулам, которые получены в результате анализа схемы (фиг. 2) при условии пренебрежения криволинейностью сторон рассматриваемого на этой схеме параллелепипеда
Аvцл(t) = arcsin[dVш(t) / Vцлп(t)]; (25)
Мvцл(t) = arcsin[dVн(t) / Vцл(t)]; (26)
где
dVш(t) = Vцш(t) - Vлш(t); (27)
dVд(t) = Vцд(t) - Vлд(t); (28)
dVн(t) = Vцн(t) - Vлн(t); (29)
Полученные значения координат, характеризующих положение ВЦ относительно ЛА в пространстве и движение ВЦ в пространстве и относительно ЛА, позволяют вычислить на ЛА текущие значения ошибок наведения ЛА на ВЦ в соответствии с заданным методом наведения. Так, при наведении ЛА методом "погони", при котором вектор Vл(t) скорости движения ЛА должен быть направлен на ВЦ, текущие значения ошибки Oпг(t) наведения ЛА в горизонтальной плоскости и ошибки Опв(t) наведения ЛА в вертикальной плоскости вычисляют по формулам
Опг(t) = Аvл(t) - Ацл(t); (31)
Опв(t) = Мvл(t) - Мцл(t); (32)
где
Аvл(t) = arcsin[Vлш(t)/Vлп(t)]; (33)
Мvл(t) = arcsin[Vлн(t)/Vл(t)]; (34)

При наведении ЛА методом параллельного сближения, при котором вектор Дцл(t) дальности ВЦ от ЛА не должен вращаться в процессе наведения, текущие значения ошибки Oпpг(t) наведения ЛА в горизонтальной плоскости и ошибки Oпpв(t) наведения ЛА в вертикальной плоскости вычисляют по формулам

где значения Vцлп(t), Ацл(t), Аvцл(t), Дцлп(t), dVн(t), Mцл(t), Дцл(t) вычисляют соответственно по формулам (30), (17), (25), (22), (29), (18), (16). Затем на ЛА в соответствии с вычисленными ошибками наведения Oпг(t) (31), Oпв(t) (32) или Oпpг(t) (37), Oпpв(t) (38) создают управляющие воздействия, под действием которых траектория полета ЛА изменяется так, чтобы ликвидировать ошибки наведения ЛА на ВЦ.
Таким образом, в заявляемом изобретении для наведения ЛА на ВЦ на НПУ принимают и обрабатывают излучение только от ВЦ. Очевидно, что такое существенное уменьшение объема принимаемого и обрабатываемого излучения по сравнению с прототипом, где требуется принимать и обрабатывать излучение как от ВЦ, так и от ЛА, позволяет значительно снизить объем вычислительных операций, выполняемых на НПУ при первичной и вторичной обработке этого излучения. Вследствие этого уменьшается количество и снижается стоимость вычислительных устройств, используемых на НПУ, чем и достигается цель изобретения.
Устройство, которое реализует предложенный способ наведения ЛА на ВЦ, включает элементы, установленные на НПУ, и элементы, установленные на ЛА. На НПУ установлены (фиг. 3) РЛС 1, РЛВ 2, В 3 и ПРД 4, причем первый и второй выходы РЛС 1 связаны соответственно с первым и вторым входами В 3, выход РЛВ 2 связан с третьим входом В 3, а первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой и девятый выходы В 3 связаны соответственно с первым, вторым, третьим, четвертым, пятым, шестым, седьмым, восьмым и девятым выходами ПРД 4.
На ЛА установлены (фиг.3) ПРМ 5, ПССН 6 и В 7, причем первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой и девятый выходы ПРМ 5 связаны соответственно с седьмым, восьмым, девятым, десятым, одиннадцатым, двенадцатым, тринадцатым, четырнадцатым и пятнадцатым входами В 7, а первый, второй, третий, четвертый, пятый и шестой выходы ПССН 6 связаны соответственно с первым, вторым, третьим, четвертым, пятым и шестым входами В 7.
Работает это устройство следующим образом. Предварительно, т.е. до начала наведения на четвертый, пятый, шестой, седьмой и восьмой входы В 3, подают соответственно значения ГШн, ГДн, Нн, Ар, Ер и запоминают эту информацию в В 3, а на шестнадцатый и семнадцатый входы В 7 подают значения Ар, Ер и запоминают эту информацию в В 7. В процессе наведения с помощью РЛС 1 облучают ВЦ радиолокационным излучением, принимают отраженное от ВЦ радиолокационное излучение и в результате его обработки измеряют текущие значения Днц и Ац, которые подают на первый и второй входы В 3 и запоминают в В 3. Одновременно c помощью РЛВ 2 облучают ВЦ радиолокационным излучением, принимают от ВЦ отраженное радиолокационное излучение и в результате его обработки измеряют текущее значение Мц, которое подают на третий вход В 3 и запоминают в В 3. С использованием поданной на В 3 информации в В 3 вычисляют по формулам (1)...(15) текущие значения dГШц, dГДц, dНц, Vцш, Vцд, Vцн, которые с соответствующих выходов В 3 подают на соответствующие входы ПРД 4. Кроме того, с седьмого, восьмого и девятого выходов В 3 на седьмой, восьмой и девятый входы ПРД 4 подают соответственно значения ГШн, ГДн и Нн. Информацию, поступившую на ПРД 4, по радиолинии передают на ПРМ 5, где принимают эту информацию. Принятые ПРМ 5 значения dГШц, dГДц, dНц, Vцш, Vцд, Vцн, ГШн, ГДн и Нн с соответствующих выходов ПРМ 5 подают на соответствующие входы В 7 и запоминают эту информацию в В 7. В процессе полета ЛА с помощью ПССН 6 измеряют текущие значения ГШл, ГДл, Нл, Vлш, Vлд, Vлн и с соответствующих выходов ПССН 6 подают на соответствующие входы В 7, запоминая эту информацию в В 7. С использованием этой информации в В 7 вычисляют по формулам (16)...(38) текущие значения Опг (Опрг) и Опв (Опрв) ошибок наведения ЛА на ВЦ в соответствии с заданным методом наведения. С выходов В 7 значения Опг (Опрг) и Опв (Опрв) подают в систему управления ЛА для формирования управляющих воздействий, под действием которых траектория полета ЛА изменяется таким образом, чтобы ликвидировать ошибки наведения.
Источники информации
1. А.М.Максимов, Г.И.Горгонов. "Радиоэлектронные системы самонаведения". - М.: Радио и связь, 1982 г., стр.6-12.
2. Г. В.Зимин (ред.), С.К.Бурмистров (ред.). "Справочник офицера противовоздушной обороны". - М.: Военное издательство, 1987 г., стр.450-459.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ БОМБОМЕТАНИИ | 2001 |
|
RU2204106C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2240588C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА НА ЦЕЛЬ | 1997 |
|
RU2117312C1 |
| СПОСОБ ЦЕЛЕУКАЗАНИЯ ПО НАПРАВЛЕНИЮ СИСТЕМЕ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 1997 |
|
RU2117902C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА | 2001 |
|
RU2206112C1 |
| СПОСОБ РАДИООБМЕНА ИНФОРМАЦИЕЙ | 2000 |
|
RU2197065C2 |
| СПОСОБ РАЗВЕДКИ | 2002 |
|
RU2229676C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2208555C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1998 |
|
RU2148795C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ОБЪЕКТА | 2000 |
|
RU2182713C2 |

Изобретение относится к способам наведения летательного аппарата (ЛА) на воздушную цель (ВЦ). Техническим результатом является уменьшение количества и снижение стоимости вычислительных устройств, используемых на неподвижном относительно Земли пункте управления (НПУ), за счет уменьшения объема вычислительных операций, которые нужно выполнять при обработке принятого на НПУ излучения. Это достигается тем, что предварительно в вычислитель (В) НПУ вводят значения географических координат (ГК) и высоты над уровнем моря (ВУМ) местоположения НПУ. Предварительно с НПУ на ЛА передают по радиолинии (РЛ) значения ГК и ВУМ местоположения НПУ. В процессе наведения с НПУ облучают ВЦ, на НПУ принимают излучение, отраженное от ВЦ, и в результате обработки принятого излучения измеряют значение дальности от НПУ до ВЦ и значения углов азимута и места направления с НПУ на ВЦ. Измеренные значения вводят в В НПУ и вычисляют приращения ГК и ВУМ местоположения ВЦ относительно местоположения НПУ, а также значения скоростей изменения ГК и ВУМ местоположения ВЦ. Вычисленные значения приращений и скоростей передают по РЛ на ЛА, где их принимают, измеряют значения ГК и ВУМ местоположения ЛА, а также значения скоростей изменения этих ГК и ВУМ, вводят принятые и измеренные значения в В ЛА, вычисляют значения ошибок наведения (ОН) ЛА на ВЦ, соответствующих заданному методу наблюдения (МН), и создают управляющие воздействия, которые изменяют траекторию полета ЛА таким образом, чтобы ликвидировать ОН ЛА на ВЦ заданным МН. 3 ил.
Способ наведения летательного аппарата на цель, который состоит в том, что с неподвижного относительно Земли пункта управления облучают воздушную цель, на этом пункте принимают излучение от этой цели, в результате обработки принятого излучения измеряют значение дальности от этого пункта до этой цели, а также значения угла азимута и угла места направления с этого пункта на цель, вводят измеренные значения в вычислитель, установленный на этом пункте, на летательном аппарате задают метод наведения его на цель и создают управляющие воздействия, которые изменяют траекторию его полета таким образом, чтобы ликвидировать ошибки его наведения на цель заданным методом, отличающийся тем, что предварительно в вычислитель этого пункта вводят значения географических координат и высоты над уровнем моря местоположения этого пункта и передают значения этих координат и этой высоты с этого пункта на летательный аппарат по радиолинии, в процессе наведения на этом пункте вычисляют текущие значения приращений географических координат и высоты над уровнем моря местоположения воздушной цели над местоположением этого пункта, а также текущие значения скоростей изменения географических координат и высоты местоположения этой цели, передают эти значения приращений и скоростей по радиолинии на летательный аппарат, где принимают эти значения приращений и скоростей, измеряют текущие значения географических координат и высоты над уровнем моря местоположения летательного аппарата, а также текущие значения скоростей изменения этих координат и высоты, вводят принятые и измеренные значения в вычислитель и вычисляют значения ошибок наведения летательного аппарата на воздушную цель, соответствующих заданному методу наведения.
| Справочник офицера противовоздушной обороны/Под редакцией Г.В | |||
| Зимина, С.К | |||
| Бурмистрова | |||
| - М.: Военное издательство, 1987, с.450-459 | |||
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
| Ягодное желе "Компоте" | 2017 |
|
RU2688055C1 |
| DE 3131089 А1, 03.03.1983. | |||

