Изобретение относится к системам наведения и может быть использовано для управления беспилотными самолетами-истребителями.
Одним из наиболее перспективных направлений создания средств защиты от воздушного нападения, органично сочетающим требования расширения боевых возможностей, повышения боевой эффективности и экономичности применения, является использование беспилотных самолетов-истребителей (БСИ).
К настоящему времени разработки в данной области в нашей стране отсутствуют. Из зарубежных можно отметить разработки США в рамках двух программ по созданию специализированных БСИ, получивших обозначение UCAV (Unmanned Combat Aerial Vehicle).
Наиболее предпочтительными областями применения БСИ являются:
- использование в ситуациях повышенной опасности (подавление зон противовоздушной обороны (ПВО), противодействие самолетам противника с превосходящими летно-техническими характеристиками и средствами поражения, противодействие гиперзвуковым летательным аппаратам (ГЗЛА) и т.д.), а также как средство доставки сверхвысокочастотного (СВЧ) оружия функционального поражения [1] в боевые порядки противника;
- использование в качестве ударных групп при перехвате хорошо защищаемых воздушных объектов (авиационных комплексов радиолокационного дозора и наведения, самолетов связи и управления, самолетов-ретрансляторов и т.д.).
Беспилотные самолеты-истребители применяются, как правило, в группе из 4, 5 летательных аппаратов [2, 3], в состав которой кроме них входит пилотируемый самолет, управляемый летчиком-командиром, который и осуществляет управление беспилотниками. Оценив обстановку, командир назначает для каждого БСИ индивидуальную цель, на которую потом он и наводится. Если на БСИ имеется несколько ракет, может быть назначена и группа близко расположенных воздушных целей.
При этом необходимо отметить, что БСИ могут использоваться не только как многоразовый транспорт для доставки средств поражения в область применения, но и в режиме «камикадзе».
Наиболее близкой к описываемой системе является информационно-вычислительная система (ИВС) современного пилотируемого самолета-истребителя [4, 5]. При этом отличия в назначении, условиях и особенностях применения БСИ, а также требованиях к его ИВС во многом определяются отсутствием на его борту летчика. С учетом этого, ИБС беспилотных истребителей должна обеспечивать:
- информационное обслуживание методов перехвата всех типов целей;
- устойчивое, высокоточное функционирование всех измерителей в более широком поле скоростей, ускорений, дальностей;
- высокую разрешающую способность визирных систем, обеспечивающую возможность индивидуального наведения на цель в составе плотной группы;
- высокую помехозащищенность, гарантирующую эффективное применение в сложной сигнально-помеховой обстановке и предопределяющую необходимость использования различных частотных диапазонов и пассивных режимов работы визирных систем;
- способность работать в условиях высокой информационной неопределенности, в том числе и в условиях подавленной бортовой радиолокационной станции (БРЛС);
- возможность оперативного перенацеливания;
- высокое быстродействие, обусловленное малым временем реакции на команды;
- возможность командиру в любой момент вмешаться в процесс наведения БСИ.
Логика применения БСИ предопределяет необходимость пяти основных режимов работы ИВС, обеспечивающих автономное наведение, командное (дальнее) наведение, самонаведение (ближнее наведение), выдачу команд целеуказания средствам поражения, а также комбинированное наведение, обеспечивающее, в том числе, и возможность летчику-командиру в любой момент вмешаться в процессы наведения.
Для решения последней задачи необходимо согласование методов наведения на этапах дальнего и ближнего наведения.
Следует отметить, что БСИ может использоваться не только для уничтожения ЛА противника, но и в качестве источника дополнительной информации для пилотируемого самолета и командных пунктов (КП) систем АСУ ВВС. В связи с этим в ИВС БСИ целесообразно иметь режим «вызова информации с его борта» (ВИБ), при использовании которого через передатчик линии передачи данных (ЛПД) БСИ на КП передаются оценки относительного и абсолютного движения и информация о его состоянии, а также информация о целях.
В ряде случаев использования пассивных режимов работы БРЛС и станции радиотехнической разведки (СРТР) обусловлена рядом причин:
- приоритетностью уничтожения самолетов-постановщиков помех как важнейших целей;
- возросшей эффективностью цифровых систем радиоподавления, позволяющих имитировать сигналы подавляемых РЛС с высочайшей точностью, что не дает возможности создать эффективные средства помехозащиты;
- наличием на борту современных самолетов большого количества радиоизлучающих систем;
- увеличением дальности обнаружения источников радиоизлучения (ИРИ) пассивными методами, по сравнению с методами активной радиолокации.
Необходимо, однако, подчеркнуть, что при использовании пассивных радиоизмерителей можно измерять лишь угловые координаты ИРИ, в то время как для реализации современных всеракурсных методов наведения необходимо иметь оценки дальности и скорости сближения [4].
Формирование таких оценок с приемлемой точностью в однопозиционных пассивных системах возможно лишь при выполнении БСИ достаточно длительного маневра [9], что не всегда выполнимо в условиях современного маневренного боя. Более совершенным приемом формирования оценок дальности и скорости сближения по угловым измерениям является использование двухпозиционных РЛС [10].
Эта особенность дает возможность предположить, что в ИВС необходимо иметь режим совместной работы с другими БСИ [11]. Кроме того, многопозиционные системы наведения дают возможность получить еще целый ряд преимуществ, обеспечивающих повышение живучести и боевой эффективности системы в целом.
Основными требованиями, предъявляемыми к методам наведения БСИ, являются:
- универсальность, обеспечивающая возможность всеракурсного перехвата всех типов ЛА - от аэростатов и зависающих вертолетов до гиперзвуковых самолетов и ракет;
- сопряжение методов командного и самонаведения, обеспечивающее переход из одного режима в другой без существенных переходных процессов;
- обеспечение максимально возможной дальности перехвата при минимальных расходах энергии, затрачиваемой на управление;
- применение на этапе командного наведения стандартного набора команд по курсу, высоте и скорости, используемого в существующих командных радиолиниях управления [6].
Одним из возможных методов наведения, удовлетворяющим этим требованиям, является формирование требуемого поперечного ускорения по закону:

при использовании которого параметр рассогласования рассчитывается по правилу

В соотношениях (1) и (2):
- индексы «Г» и «В» соответствуют горизонтальной и вертикальной плоскостям;
- φТ и ωТ - требуемые значения бортового пеленга и угловой скорости линии визирования, определяемые решаемой задачей, условиями применения, режимами работы визирных систем и применяемым оружием;
- jцг,в - поперечные ускорения цели;
-  - текущие значения оценок бортового пеленга, угловой скорости линии визирования и поперечного ускорения;
- текущие значения оценок бортового пеленга, угловой скорости линии визирования и поперечного ускорения;
-  - оценки дальности от БСИ до цели и скорости ее изменения;
- оценки дальности от БСИ до цели и скорости ее изменения;
- qφ и qω - штрафы за точность управления по углу и угловой скорости;
- kj - штраф за величину управляющего сигнала, зависящий от предельно допустимого значения jтг,в.
Анализ (1), (2) позволяет сделать следующие заключения:
- метод является всевысотным, поскольку управляющий сигнал рассогласования формируется не по разности требуемого и текущего положений рулей, эффективность которых зависит от высоты, а по разности ускорений;
- метод является всеракурсным, поскольку для разных условий направление полета учитывается величиной и знаком jтг,в, φтг,в и ωтг,в;
- метод учитывает маневр цели;
- алгоритм траекторного управления (1), (2) обеспечивает хорошую управляемость как на больших расстояниях за счет первого слагаемого в (1), так и на малых расстояниях, гарантируя высокую точность за счет учета второго слагаемого [6].
При этом выбором коэффициентов qφ и qω обеспечивается автоматическое перераспределение управления от превалирующего влияния ошибки по углу на больших расстояниях к превалирующему влиянию ошибки по угловой скорости на малых дальностях, минимизируя тем самым промах [4]

где
Д - дальность от БСИ до цели;
ω - угловая скорость линии визирования «БСИ-цель»;
V - скорость сближения БСИ с целью.
Необходимо особо подчеркнуть, что (1), (2) дают возможность обеспечить хорошее сопряжение самонаведения и командного управления за счет учета связи производной курса и поперечного ускорения [4]

где  - производная требуемого курса; jт,г - требуемое ускорение в горизонтальной плоскости, рассчитываемое по (1); VГБСИ - горизонтальная составляющая скорости БСИ.
- производная требуемого курса; jт,г - требуемое ускорение в горизонтальной плоскости, рассчитываемое по (1); VГБСИ - горизонтальная составляющая скорости БСИ.
По соотношению (4) достаточно просто в k-е моменты времени формируются требуемые значения курса по правилу

а параметры рассогласования на борту БСИ - по несоответствию

где Т - интервал передачи команд;  - оценка текущего значения курса БСИ.
- оценка текущего значения курса БСИ.
Для реализации (1), (2) и (5), (6) в состав ИВС БСИ должны входить измерители (алгоритмы формирования оценок) дальности, скорости сближения с целью, составляющих собственной скорости, бортовых пеленгов и угловых скоростей линии визирования в горизонтальной и вертикальной плоскостях, поперечных ускорений цели и БСИ и его курса.
Следует отметить, что оценки всех этих фазовых координат должны формироваться и в ИВС пилотируемого самолета.
Перечисленные выше особенности применения БСИ, требования к его ИВС и применяемым в ней методам наведения обусловливают необходимость использования следующих режимов функционирования:
- поиска и захвата целей на сопровождении;
- многоцелевого и одиночного сопровождения целей;
- распознавания целей;
- краткосрочного и долгосрочного прогноза эволюции цели;
- разрешения целей в плотной группе;
- интеллектуальной поддержки принятия решений;
- формирования решений;
- комплексной обработки информации от датчиков различной физической природы;
- использования пассивных измерителей, в том числе в составе РЛС и станции радиотехнической разведки;
- многогипотезного прогноза;
- обмена информацией с пилотируемым самолетом и с другими БСИ.
Структурная схема ИБС, реализующей эти режимы, показана на чертеже, на котором входы обозначены цифрами, а выходы - цифрами в квадратных скобках.
Система включает: доплеровский измеритель скорости и угла сноса (ДИСС) 1, (НС) инерциальную и (или) спутниковую навигационную систему (НС) 2, бортовую вычислительную систему (БВС) 3, бортовую радиолокационную систему (БРЛС) 4, оптико-электронную систему (ОЭС) 5, приемник командной радиолинии управления беспилотного самолета-истребителя (ПРМ КРУ БСИ) 6, передатчик линии передачи данных беспилотного самолета-истребителя (ПРД ЛПД БСИ) 7, информационно-вычислительную систему командного пункта (ИВС КП) 8, гироскоп (ГР) 9, акселерометр (АКС) 10, станцию радиотехнической разведки (СРТР) 11, систему долгосрочного прогноза (СДП) 12, систему краткосрочного прогноза (СКП) 13, систему формирования решений (СФР) 14.
Технический результат, который может быть получен от реализации предлагаемого технического решения, заключается в том, что информационно-вычислительная система, выполненная на его основе, обеспечивает эффективное на любой высоте полета всеракурсное управление БЛИ и позволяет повысить живучесть и экономичность систем наведения, снизить потери летного состава и дорогостоящих пилотируемых самолетов при ведении боевых действий.
Указанный технический результат достигается тем, что в информационно-вычислительную систему БСИ, содержащую ДИСС; НС, ГР; АКС; СРТР; БРЛС в составе дальномера (ДМ БРЛС), угломера (УМ БРЛС) и приемопередатчика (ПРМ-ПРД); ОЭС в составе дальномера (ДМ ОЭС) и угломера (УМ ОЭС); приемника командной радиолинии управления (ПРМ КРУ) (БСИ), БВС, при этом первый выход ДИСС соединен с первым входом НС, второй выход ДИСС соединен с первым входом БВС, второй вход БВС соединен с выходом НС, третий вход БВС - с выходом АКС, четвертый вход БВС - с выходом ГР, пятый вход БВС - с выходом СРТР, шестой вход БВС - с первым выходом ДМ ОЭС, седьмой вход БВС - с первым выходом УМ ОЭС, восьмой вход БВС - с первым выходом ДМ БРЛС, девятый вход БВС - с первым выходом УМ БРЛС, десятый вход БВС - с первым выходом ПРМ КРУ БСИ, первый выход БВС - со вторым входом НС, второй выход БВС соединен с управляющей системой (УС) БСИ, в которую поступает параметр рассогласования, дополнительно введены передатчик линии передачи данных (ПРД ЛПД) БСИ; информационно-вычислительная система командного пункта (ИВС КП) в составе приемника линии передачи данных командного пункта (ПРМ ЛПД КП), передатчика командной радиолинии управления командного пункта (ПРД КРУ КП) и системы принятия решений (СППР), а также система долгосрочного прогноза (СДП), система краткосрочного прогноза (СКП) и система формирования решения (СФР), при этом третий выход БВС является входом ПРД ЛПД БСИ, выход которого является входом ПРМ ЛПД КП, выход ПРМ ЛПД КП соединен с входом СППР, выход СППР соединен с входом ПРД КРУ КП, выход которого является входом ПРМ КРУ БСИ. Второй выход ПРМ КРУ БСИ соединен с третьим входом СФР, первый вход которой является первым выходом СДП, а второй вход - вторым выходом СКП. Первый выход СФР соединен с пятым входом СДП, второй выход СФР - с шестым входом СКП, третий выход СФР - с двенадцатым входом БВС. Первые входы СДП и СКП соединены со вторым выходом ДМ БРЛС, вторые входы СДП и СКП - со вторым выходом УМ БРЛС, а третьи входы СДП и СКП соединены с первым выходом ПРМ-ПРД, третий выход СКП является четвертым входом СДП. Первый выход СКП является одиннадцатым входом БВС, со второго выхода которой на вход управляющей системы БЛИ подается сигнал рассогласования.
Функциональное назначение, представленной на чертеже структурной схема ИВС БСИ, заключается в преобразовании измерений (оценок) фазовых координат абсолютного и относительного движения цели и наводимого БСИ в параметры рассогласования, являющиеся входными воздействиями управляющей системы (УС) БСИ [4] и обеспечивающие целенаправленное изменение его пространственного положения в соответствии с (1) и (2).
Система работает следующим образом.
В режиме автономного наведения БСИ выводятся в область пространства, в которой они уверенно берутся на управление летчиком пилотируемого истребителя или оператором авиационного комплекса радиолокационного дозора и наведения [7]. Полет в эту область осуществляется на основе информации, поступающей от ИНС, счисляющей собственные координаты хБСИ, zБСИ (с начальными значениями х0, z0) и измерений составляющих собственной скорости VБСИ, поступающих от ДИСС. Для решения этой задачи может использоваться и СНС. Счисленные координаты передаются в БВС, в которой в соответствии с тем или иным методом автономного наведения [6] формируется параметр рассогласования Δ, поступающий в УС. Под действием Δ управляющая система отклоняет рули, вызывая требуемые изменения пространственного положения БСИ.
При использовании автономной ИНС в процессе полета накапливаются ошибки счисления координат хБСИ, zБСИ, которые корректируются сигналами хk, zk, формируемыми в БВС по оценкам составляющих скорости ДИСС, либо по оценкам дальности Дор и бортового пеленга φор до заранее намеченного радиолокационного ориентира, поступающих из БРЛС.
Необходимо отметить, что в автономном режиме в БСИ по КРУ могут поступать команды перенацеливания и изменения режимов работы ИВС.
Режим командного наведения имеет две разновидности. При первой - команды управления в виде требуемых значений курса ΨT высоты HT и скорости VT формируется на командном пункте или авиационном комплексе радиолокационного дозора и наведения (АК РЛДН). По этим командам БСИ выводится в район взятия его на управление летчиком пилотируемого самолета, либо оператором другого АК РЛДН. По своему целевому назначению этот режим адекватен автономному наведению.
Вторая разновидность командного наведения используется для вывода БСИ в район захвата цели на сопровождение его визирными системами. В этом случае требуемые значения ΨT, HT и VT формируются либо на пилотируемом истребителе, либо на АК РЛДН. При этом требуемые значения курса должны формироваться по закону (5), обеспечивающему хорошее сопряжение с методом самонаведения (1), либо по одному из известных методов командного наведения [6]. При групповом использовании БСИ в процессе наведения на одну цель (группу целей) значения ΨT, HT и VT для каждого объекта могут формироваться по различным законам, обеспечивающим реализацию замысла летчика-командира или оператора наведения АК РЛДН в процессе его защиты от истребителей и ракет противника.
При подлете к цели на определенное расстояние через ПРМ КРУ поступает команда на включение его БРЛС (ОЭС) и организацию поиска цели по определенной программе обзора пространства. Этап командного наведения завершается захватом цели БРЛС или ОЭС и взятием ее на автосопровождение по дальности, скорости сближения, бортовым пеленгам и угловым скоростям линии визирования, после чего ИВС переходит в режим самонаведения.
В режиме самонаведения требуемая траектория полета формируется по закону (1), а параметр рассогласования - по правилу (2). Для их информационного обеспечения в БРЛС (ОЭС) БСИ в дальномерном канале формируются оценки  , в угломерном -
, в угломерном -  , а оценки собственного курса
, а оценки собственного курса  и конкретных ускорений
и конкретных ускорений  поступают от гироскопа и акселерометров (чертеж).
поступают от гироскопа и акселерометров (чертеж).
Для индивидуального поражения целей, назначенных летчиком-командиром (оператором наведения), в плотной группе используется алгоритм так называемого траекторного управления наблюдением. При этом требуемые значения бортового пеленга и φТ угловой скорости ωТ в (1) рассчитываются по специальным правилам [8], при использовании которых разрешающая способность по угловым координатам определяется не шириной диаграммы направленности, а разрешением по доплеровской частоте, приводящем к доплеровскому обострению луча при полете по специальной траектории.
Следует отметить, что БРЛС и ОЭС работают по известным алгоритмам [4, 5].
Если БЛС используется в качестве источника дополнительной информации для пилотируемого самолета и КП систем АСУ ВВС в режиме «вызова информации» (ВИБ), то через передатчик ЛПД БСИ на КП передаются оценки относительного и абсолютного движения БСИ, его состояния и информация о целях.
В отсутствии командного радиоуправления (КРУ), например, вследствие его подавления противником, прогнозирование траекторных эволюций цели и автономное формирование решений по наведению на цель в ИВС БСИ обеспечивает СФР, а в ИВС КП - система поддержки принятия решения (СППР). При этом прогноз поведения противника должен иметь две особенности. Одна - обусловливается необходимостью кратковременного прогноза пространственного положения противника, длительность которого ограничена временем жизни гипотезы движения, положенной в основу прогноза. Этот прогноз реализуется в системе краткосрочного прогноза (СКП). Вторая - предопределяет необходимость долгосрочного прогноза, основанного на знании тактики действий и типовых приемов действий противника [12], который реализуется в системе долгосрочного прогноза (СДП). Эти особенности приводят к использованию аппарата нечеткой логики многогипотезного сопровождения с оценкой высоких производных дальности и углов и синтеза систем на основе концепции систем с переменной структурой.
ЛИТЕРАТУРА
1. Добыкин В.Д., Куприянов А.И., Пономарев В.Г., Шустов Л.Н. Радиоэлектронная борьба. Силовое поражение радиоэлектронных систем. - М.: Вузовская наука, 2007.
2. Хрипунов С.П., Макаров А.В. Беспилотные истребители в воздушном бою. // Аэрокосмическое обозрение. - 2003. - №6.
3. Левицкий С.В., Киселев М.А., Ступак Ю.В., Шумский А.В. Концепция создания боевого авиационного комплекса на основе беспилотного самолета-истребителя. // Вестник академии наук авиации и воздухоплавания. - 2003. - №2.
4. Меркулов В.И., Дрогалин В.В., Богачев А.С. и др. Авиационные системы радиоуправления. Т.2. Радиоэлектронные системы самонаведения. / Под ред. Канащенкова А.И. и Меркулова В.И. - М.: Радиотехника, 2003.
5. Антипов В.Н., Исаев С.А., Лавров А.А., Меркулов В.И. Многофункциональные радиолокационные комплексы истребителей. / Под ред. Кондратенкова В.С. - М.: Военное издательство, 1994.
6. Меркулов В.И., Чернов В.С., Дрогалин В.В. и др. Авиационные системы радиоуправления. Т.3. Системы командного радиоуправления. Автономные и комбинированные системы наведения. / Под ред. Канащенкова А.И. и Меркулова В.И. - М.: Радиотехника, 2004.
7. Верба В.С. Авиационные комплексы радиолокационного дозора и наведения. Состояние и тенденции развития. - М.: Радиотехника, 2008.
8. Меркулов В.И. Улучшение разрешающей способности бортовой радиолокационной системы по углу путем траекторного управления наблюдением. // Радиотехника. - 2003. - №1.
9. Дрогалин В.В., Меркулов В.И., Чернов В.С.и др. Определение координат и параметров движения источников радиоизлучения по угломерным данным в однопозиционных бортовых радиолокационных системах. // Зарубежная радиоэлектроника. Успехи современной радиоэлектроники. - 2002. - №3.
10. Дрогалин В.В., Ефимов В.А., Меркулов В.И. и др. Алгоритмы оценивания координат и параметров движения радиоизлучающих целей в угломерных двухпозиционных бортовых радиолокационных системах. // Информационно-измерительные и управляющие системы. - 2003. - №1.
11. Меркулов В.И., Чернов B.C., Юрчик И.А. Авиационные многопозиционные системы радиоуправления. // Успехи современной радиоэлектроники. - 2006. - №12.
12. Хрипунов С.П., Демин А.Н. Алгоритмы прогнозирования тактики противника в групповом воздушном бою. Труды ВВИА им. проф. Н.Е.Жуковского. - М.: Радиотехника, №2, т.80, 2008.
| название | год | авторы | номер документа |
|---|---|---|---|
| УГЛОМЕРНО-КОРРЕЛЯЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2458358C1 |
| Способ совместного функционирования бортовых радиолокационных станций и станций активных помех при распределении задач поражения и прикрытия между истребителями пары | 2022 |
|
RU2789849C1 |
| Способ скрытого наведения пары перехватчиков на воздушную цель | 2023 |
|
RU2807467C1 |
| Способ управления пространственным положением и режимами работы бортовой станции активных помех для обеспечения скрытого самонаведения пары перехватчиков на воздушную цель | 2024 |
|
RU2830067C1 |
| СПОСОБ КОМАНДНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ | 2009 |
|
RU2408846C1 |
| Способ функционирования системы импульсно-доплеровских бортовых радиолокационных станций группы истребителей при обеспечении их электромагнитной совместимости в условиях воздействия помех | 2020 |
|
RU2742815C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2022 |
|
RU2791341C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ИСТРЕБИТЕЛЯ | 2010 |
|
RU2439461C1 |
| ТРЕНАЖЕР ВОЗДУШНОГО БОЯ | 2005 |
|
RU2297674C2 |
| Способ двухэтапного ранжирования воздушных целей по степени опасности в радиолокационных информационно-управляющих системах | 2018 |
|
RU2686482C1 |
Изобретение относится к области приборостроения и может быть использовано для управления беспилотными самолетами-истребителями. Технический результат - расширение функциональных возможностей. Для достижения данного результата информационно-вычислительная система (ИБС) беспилотного самолета-истребителя (БСИ) содержит доплеровский измеритель скорости и угла сноса (ДИСС); инерциальную и (или) спутниковую навигационную систему (НС); гироскоп (ГР); акселерометр (АКС); станцию радиотехнической разведки (СРТР); бортовую радиоэлектронную систему (БРЛС), включающую дальномер (ДМ БРЛС), угломер (УМ БРЛС) и приемопередатчик (ППД БРЛС); оптоэлектронную систему (ОЭС), включающую дальномер (ДМ ОЭС) и угломер (УМ ОЭС); приемник командной радиолинии управления (ПРМ КРУ) (БСИ); бортовую вычислительную систему (БВС). 1 ил.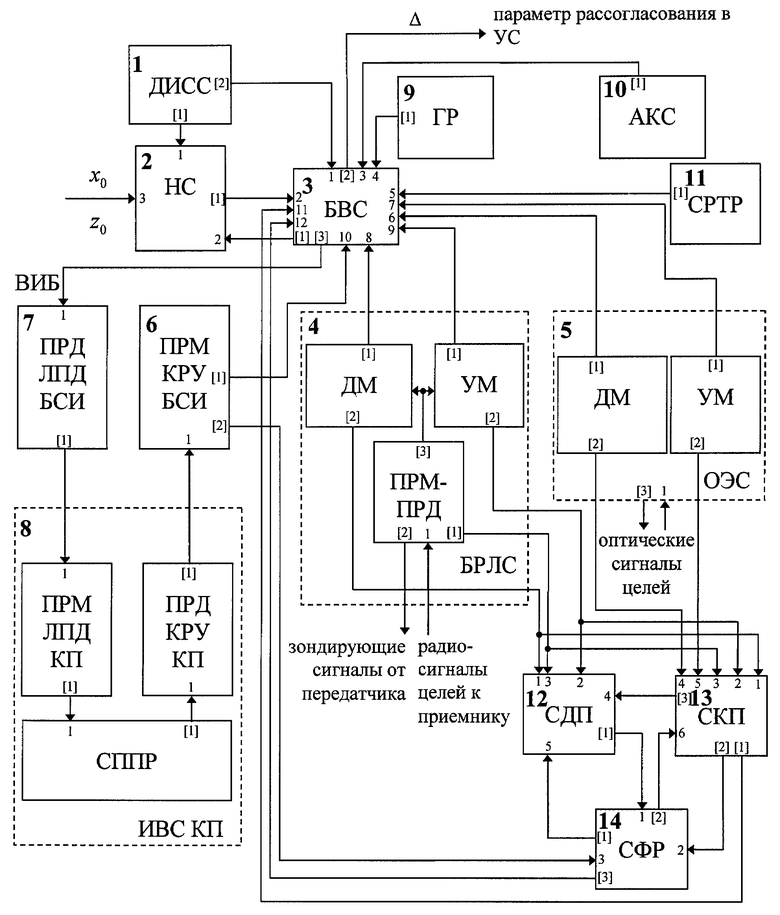
Информационно-вычислительная система (ИБС) беспилотного самолета-истребителя (БСИ), содержащая доплеровский измеритель скорости и угла сноса (ДИСС), инерциальную и (или) спутниковую навигационную систему (НС), гироскоп (ГР), акселерометр (АКС), станцию радиотехнической разведки (СРТР), бортовую радиоэлектронную систему (БРЛС), включающую дальномер (ДМ БРЛС), угломер (УМ БРЛС) и приемо-передатчик (ППД БРЛС); оптоэлектронную систему (ОЭС), включающую дальномер (ДМ ОЭС) и угломер (УМ ОЭС); приемник командной радиолинии управления (ПРМ КРУ) (БСИ), бортовую вычислительную систему (БВС), при этом первый выход ДИСС соединен с первым входом НС, второй выход ДИСС соединен с первым входом БВС, второй вход БВС соединен с выходом НС, третий вход БВС - с выходом АКС, четвертый вход БВС - с выходом ГР, пятый вход БВС - с выходом СРТР, шестой вход БВС - с первым выходом ДМ ОЭС, седьмой вход БВС - с первым выходом УМ ОЭС, восьмой вход БВС - с первым выходом ДМ БРЛС, девятый вход БВС - с первым выходом УМ БРЛС, десятый вход БВС - с первым выходом ПРМ КРУ БСИ, первый выход БВС - со вторым входом НС, второй выход БВС является входом управляющей системы (УС) БСИ, на который поступает параметр рассогласования Δ, отличающаяся тем, что дополнительно в нее введены передатчик линии передачи данных (ПРД ЛПД) БСИ; информационно-вычислительная система командного пункта (ИБС КП) в составе приемника линии передачи данных командного пункта (ПРМ ЛПД КП), передатчика командной радиолинии управления командного пункта (ПРД КРУ КП) и системы принятия решений (СППР); система долгосрочного прогноза (СДП), система краткосрочного прогноза (СКП), система формирования решения (СФР), при этом третий выход БВС является входом ПРД ЛПД БСИ, выход ПРД ЛПД БСИ является входом ПРМ ЛПД КП, у которого выход соединен с входом СППР, выход которой соединен с входом ПРД КРУ КП, у которого выход является входом ПРМ КРУ БСИ, второй выход ПРМ КРУ БСИ соединен с третьим входом СФР, первый вход СФР соединен с выходом СДП, а второй вход - со вторым выходом СКП, первый выход СФР соединен с пятым входом СДП, второй выход СФР - с шестым входом СКП, третий выход СФР - с двенадцатым входом БВС, первые входы СДП и СКП соединены со вторым выходом ДМ БРЛС, вторые входы СДП СКП соединены со вторым выходом УМ БРЛС, а третьи входы СДП и СКП соединены с первым выходом ПРМ-ПРД БРЛС, четвертый вход СКП является вторым выходом ДМ ОЭС, пятый вход СКП - вторым выходом УМ ОЭС, первый выход является одиннадцатым входом БВС, а третий выход соединен с четвертым входом СДП.
| АНТИПОВ В.Н., ИСАЕВ С.А., ЛАВРОВ А.А., МЕРКУЛОВ В.И | |||
| Многофункциональные радиолокационные комплексы истребителей | |||
| / Под ред | |||
| В.С | |||
| Кондратенкова | |||
| - М.: Военное издательство, 1994 | |||
| Цилиндрический сушильный шкаф с двойными стенками | 0 |
|
SU79A1 |
| МЕРКУЛОВ В.И., ЧЕРНОВ B.C., ЮРЧИК И.А | |||
| Авиационные многопозиционные системы радиоуправления | |||
| Успехи современной радиоэлектроники | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| БОТУЗ | |||

