Изобретение относится к системам наведения, в частности к системам командного наведения самолетов на наземные объекты, использующим для картографирования земной поверхности бортовые радиолокационные станции (БРЛС), а в качестве средств поражения - ракеты воздух-поверхность (В-П) различного назначения.
В настоящее время, ввиду невозможности высокоточного определения координат удаленных наземных целей с помощью наземных радиолокационных станций (РЛС), командное наведение самолетов на наземные цели не используются. Для решения этой задачи применяются системы самонаведения, эффективность которых в значительной степени зависит от используемых методов самонаведения и методов картографирования местности.
Методы самонаведения должны обеспечивать вывод самолета на определенное расстояние, под определенным углом и с определенной угловой скоростью линии визирования (УСЛВ) цели [1], зависящими от режимов работы БРЛС (обычный луч (ОЛ), доплеровское обострение луча (ДОЛ), фокусированное синтезирование апертуры (ФСА) антенны [2]) и используемых средств поражения (бомбы, ракеты В-П с некогерентными и когерентными головками самонаведения).
Необходимо, однако, отметить, что системам самонаведения присущи два серьезных недостатка:
дальность действия ограничивается дальностью действия бортовой РЛС, что при малой высоте полета, которая необходима для преодоления наземных систем противовоздушной обороны ПВО [3], приводит к уменьшению дальности действия системы наведения самолета;
низкая скрытность, обусловленная работой РЛС на излучение, что приводит к возрастанию вероятности обнаружения ударного самолета противоборствующей стороной с принятием мер огневого или радиоэлектронного противодействия.
В связи с этим весьма эффективным средством устранения этих недостатков является использование командного наведения ударных самолетов носителей средств поражения с высоко летящих и далеко расположенных от зон действия ПВО противника авиационных комплексов радиолокационного дозора и наведения (АК РЛДН), без включения БРЛС наводимого ударного самолета. Такой прием обеспечивает, с одной стороны, существенное увеличение скрытности наведения, а с другой стороны, возрастание дальности действия системы наведения в целом, особенно при полете ударного самолета на малой высоте [4].
Однако необходимо подчеркнуть, что командное наведение должно обеспечивать все те же преимущества, которые давало самонаведение по адаптации к режимам работы БРЛС и средствам поражения, при условии, что набор команд, передаваемых на борт наводимого ударного самолета, должен быть таким же, что и при передаче на самолет, наводимый на воздушные цели [3].
Задача изобретения - разработка способа командного наведения по курсу в горизонтальной плоскости с АК РЛДН ударного летательного аппарата (ЛА), например самолета, на наземную, в общем случае, подвижную цель.
В наиболее простом варианте для командного наведения на наземную цель может быть использован метод прямого наведения [3], используемый в системах командного радиоуправления наземного базирования при наведении на воздушные цели. Суть этого метода состоит в том, что продольная ось наводимого ЛА должна все время совмещаться с направлением на цель. В такой ситуации требуемый курс должен формироваться по правилу [3]
где ψТ(k) - требуемое значение курса в k-й момент времени;
xЦ, zЦ и xC, zC - координаты ЛА в k-й момент времени в той или иной прямоугольной системе координат.
Однако при наведении на движущиеся цели этот метод, как и все разновидности прямых методов [1, 3], имеет ограничения по ракурсам наведения, обеспечивая эффективный вывод на цель только в задней полусфере. Кроме того, при этом методе не учитывается специфика работы БРЛС наводимого ударного ЛА в различных режимах (ОЛ, ДОЛ, ФСА), используемой для коррекции и выдачи команд целеуказания средствам поражения.
Техническим результатом изобретения является реализация возможности командного всеракурсного наведения ударных ЛА на наземные, в общем случае, подвижные цели, обеспечивающего большую дальность и более высокую скрытность наведения по сравнению с системами самонаведения, а также адаптацию к режимам работы БРЛС наводимого ударного ЛА (при необходимости ее включения) и используемым средствам поражения.
Эта возможность реализуется тем, что на борту АК РЛДН одновременно измеряются собственные координаты местоположения xAK, zAK, дальности до цели ДЦ и наводимого ЛА ДС и их азимуты φЦ и φC, определяются требуемые значения бортового пеленга φT цели с наводимого ЛА, угловой скорости ωT линии визирования цели, расстояния ДСЦ между целью и наводимым ЛА и его скорость VC, по которым формируют сигнал требуемого курса ψT в виде алгебраической суммы его значения на предыдущем такте и взвешенных на соответствующие коэффициенты усиления значения ошибок наведения по бортовому пеленгу и угловой скорости линии визирования

где в соотношениях (1) и (2):
ψT(k) и ψT(k-1) - требуемые значения курса в k-й и (k-1)-й моменты времени, отстоящие друг от друга на интервал t передачи команд на борт наводимого ЛА;
φT и  - соответственно требуемое расчетное значение бортового пеленга и оценка его фактического текущего значения;
- соответственно требуемое расчетное значение бортового пеленга и оценка его фактического текущего значения;
ωT и  - соответственно требуемое расчетное значение угловой скорости линии визирования цели и ее текущая оценка;
- соответственно требуемое расчетное значение угловой скорости линии визирования цели и ее текущая оценка;
ДСЦ - расстояние между наводимым ударным ЛА и целью;
VC - скорость полета наводимого ЛА самолета;
qφ и qω - коэффициенты, определяющие точность наведения соответственно по бортовому пеленгу и УСЛВ цели.
Kψ - коэффициент, определяющий максимальную величину крена наводимого ударного ЛА при обработке значений при максимальных ошибках наведения.
Геометрические соотношения между фазовыми координатами, используемыми в (1) и (2), показаны на фиг.1.
На этом чертеже в системе координат X0OZ0, связанной с определенной точкой земной поверхности [4], показано расположение OAK авиационного комплекса радиолокационного дозора и наведения (АК РЛДН), OC - наводимого ударного ЛА и ОЦ - цели, а также векторы VAK, VC, и VЦ скоростей АК РЛДН, ЛА и цели, текущие значения курса ψ и бортового пеленга φ и требуемые значения курса ψT.
Необходимо отметить, что в зависимости от предполагаемого режима работы БРЛС наводимого ударного ЛА и применяемого оружия требуемые значения ψT и ωT рассчитываются по различным формулам.
Если после окончания командного наведения предполагается использование БРЛС наводимого ударного ЛА в режиме обычного (реального) луча [2] и неуправляемого оружия, то

Целесообразность использования ωT=0 следует из соотношения [1] для текущего промаха h
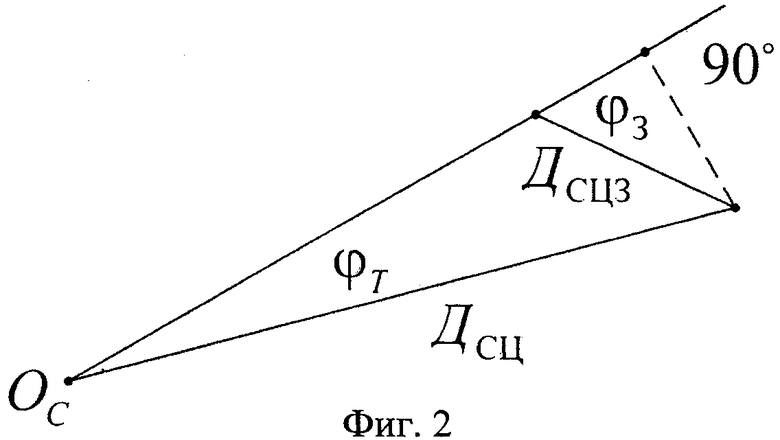
Если необходимо вывести ударный ЛА в точку включения БРЛС в режимах ДОЛ или ФСА, то требуемое значение бортового пеленга и угловой скорости линии визирования определяются соотношениями [6]

где ДСЦЗ и φЗ - заданные (известные) значения дальности от наводимого ударного ЛА до цели и ее бортового пеленга, на которых необходимо включить его БРЛС;
λ и ΔF - длина волны БРЛС и полоса пропускания ее доплеровского фильтра;
ΔlT - требуемая линейная разрешающая способность БРЛС по азимуту;
VC - скорость полета наводимого ударного ЛА.
Геометрическое соотношение между фазовыми координатами, используемыми в (5) показано на фиг.2.
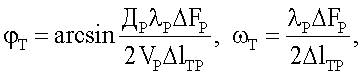
Если наводимый ударный ЛА по командам выводится непосредственно в точку применения неуправляемого оружия или ракет с некогерентными радиолокационными головками самонаведения (РГС), то требуемые значения бортового пеленга и УСЛВ определяются соотношениями (3). При использовании ракет с когерентными РГС, способных работать в режиме ДОЛ (ФСА):

где ДР - дальность пуска ракеты;
λP и ΔFP - длина волны РГС и полоса пропускания ее доплеровского фильтра;
ΔlTP - требуемое линейное разрешение РГС по азимуту.
Текущие значения  и
и  могут быть рассчитаны на АК РЛДН, исход из линейных перемещений наводимого ударного ЛА за время t, равное интервалу передачи команд наведения
могут быть рассчитаны на АК РЛДН, исход из линейных перемещений наводимого ударного ЛА за время t, равное интервалу передачи команд наведения

где было учтено, что 
Анализ соотношений (2)-(8) позволяет сделать следующие заключения.
Предложенный способ наведения ударных ЛА обеспечивает хорошее сопряжение алгоритма командного наведения с последующими этапами самонаведения при всех возможных режимах работы БРЛС без ограничения по ракурсам наведения. При этом существенно сокращается время работы БРЛС на излучение, поскольку она используется лишь для проведения коррекции и выдачи команд целеуказания средствам поражения.
Кроме того, предложенный способ обеспечивает хорошее сопряжение с различными вариантами использования средств поражения, что позволяет еще больше повысить скрытность наведения за счет вывода ударного ЛА непосредственно в область применения оружия без включения БРЛС наводимого самолета.
Способ наведения по выражению (2) определяется рекуррентным соотношением, в котором второе и третье слагаемые представляют собой взвешенные ошибки наведения по бортовому пеленгу и УСЛВ цели. Переменный коэффициент при третьем слагаемом учитывает условия функционирования наводимого ударного ЛА ДСЦ и VC. Это предопределяет перераспределение управляющих воздействий от устранения ошибок по углу на первоначальном участке наведения к устранению ошибок по УСЛВ цели на конечном участке, что обусловливает повышение точности наведения (4).
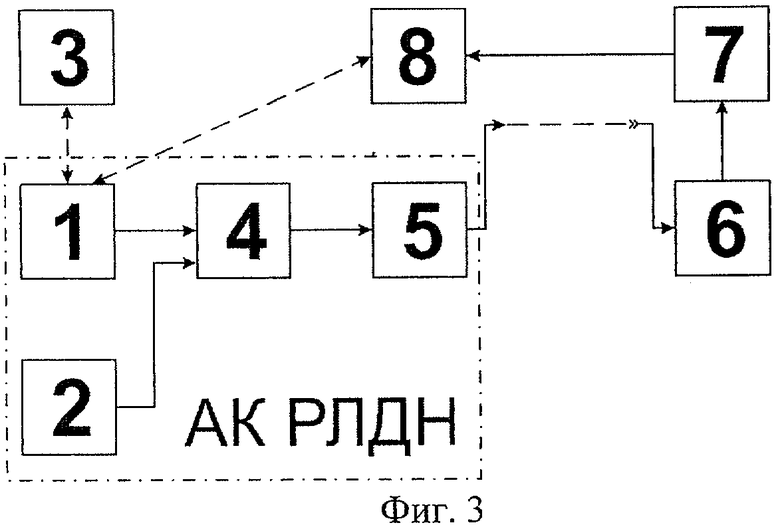
На фиг.3 представлена упрощенная схема возможного варианта системы командного наведения ударного ЛА на наземную цель, реализующей предлагаемый способ, где
1 - бортовая радиолокационная станция АК РЛДН (БРЛС АК РЛДН);
2 - навигационная система АК РЛДН;
3 - наземная цель;
4 - вычислитель АК РЛДН;
5 - передающая часть командной радиолинии управления (КРУ), размещенной на АК РЛДН;
6 - приемная часть КРУ, размещенная на наводимом ударном ЛА;
7 - система автоматического управления наводимого ударного ЛА;
8 - наводимый ударный ЛА.
Пунктирными линиями на схеме обозначены связи, реализуемые посредством радиосигналов.
Принципы построения бортовой РЛС и навигационной системы АК РЛДН известны и подробно описаны в литературе [3, 4]. Функционирование системы выполняется в следующем порядке.
Бортовая РЛС АК РЛДН 1, работающая в режиме кругового обзора с периодом обзора Т, формирует измерения дальности ДЦ до цели и ДС до ударного ЛА, и азимутов φЦ и φС (фиг.1), которые поступают в вычислитель 4, куда одновременно поступают измерения собственных координат xАК, zАК АК РЛДН, формируемые в навигационной системе. Вычислитель по результатам измерений ДЦ, φЦ, ДС, φС и xАK, zАK рассчитывает координаты цели (фиг.1)
и наводимого ЛА
В свою очередь, по (9) и (10) в вычислителе формируются косвенные измерения путем расчета текущих значений бортового пеленга φ цели относительно наводимого ударного ЛА (7), УСЛВ цели (8) и расстояния ДСЦ между целью и наводимым ударным ЛА

и его скорости

где T - период обзора РЛС АК РЛДН.
По косвенным измерениям (7), (8) и (11), (12) и рассчитанным значениям требуемого пеленга φT и требуемой УСЛВ ωT (3), (5) или (6), формируется сигнал требуемого курса (2), который поступает в передающую часть командной радиолинии управления 5. В передающей части КРУ, принцип работы которой известен [3], осуществляется кодирование сигнала ψT с дальнейшей модуляцией им сверхвысокочастотного сигнала, излучаемого в пространство.
Излученный сигнал поступает в приемную аппаратуру 6 КРУ, размещаемую на ударном ЛА, где выполняется демодуляция и декодирование с формированием сигнала ψT(k), который поступает в САУ 7, преобразующую его в управляющие сигналы воздействия, передаваемые по командной радиолинии управления на борт наводимого ударного ЛА, в результате которых и выполняется изменение текущего курса, реализующего наведение ударного ЛА 8 на наземную цель.
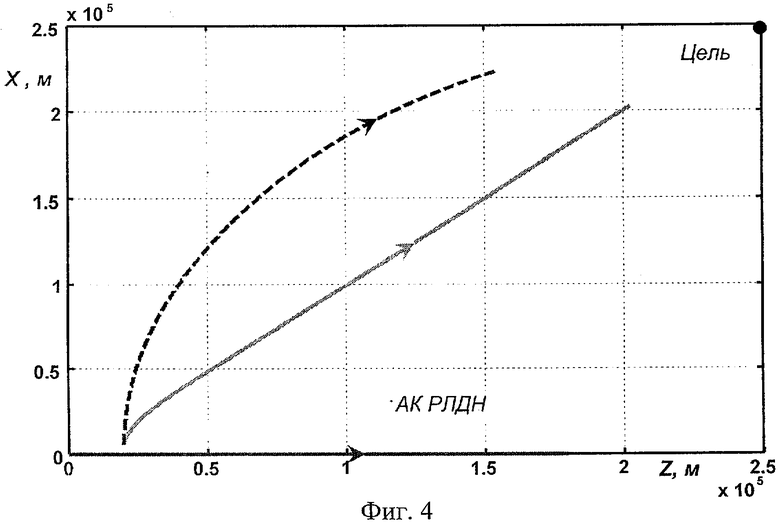
В качестве иллюстрации на фиг.4 для одних и тех же первоначальных ошибок наведения показаны траектории полета наводимого ЛА при использовании прямого метода (1) (штриховая линия) и предложенного способа (2) (сплошная линия), свидетельствующие о преимуществах последнего.
Литература
[1] Меркулов В.И., Дрогалин В.В., Канащенков А.И. и др. Авиационные системы радиоуправления. Т.2. Радиоэлектронные системы самонаведения. / Под ред. А.И.Канащенкова и В.И.Меркулова. - М.: Радиотехника, 2003. 389 с.
[2] Канащенков А.И., Меркулов В.И., Герасимов А.А. и др. Радиолокационные системы многофункциональных самолетов. Т.1. РЛС - информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов. / Под ред. А.И.Канащенкова и В.И.Меркулова. - М.: Радиотехника, 2006. 655 c. Меркулов В.И., Канащенков А.И, Чернов В.С. и др. Авиационные системы радиоуправления. Т.3. Системы командного радиоуправления. Автономные и комбинированные системы наведения. / Под ред. А.И.Канащенкова и В.И.Меркулова. - М.: Радиотехника, 2004. 317 с.
[3] Верба, В.С. Авиационные комплексы радиолокационного дозора и наведения. Состояние и тенденции развития. - М.: Радиотехника. 2008. 432 с.
[4] Меркулов В.И., Дрогалин В.В., Канащенков А.И. и др. Авиационные системы радиоуправления. Т.1. Принципы построения систем радиоуправления. Основы синтеза и анализа. / Под ред. А.И.Канащенкова и В.И.Меркулова. - М.: Радиотехника, 2003. 190 с. Пат. 2210801 Российская Федерация. Универсальный способ наведения самолетов на наземные цели / Кононов Е.И., Канащенков А.И., Меркулов В.И., Самарин О.Ф., Францев В.В., Чернов B.C., Шуклин А.И.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА БЕСПИЛОТНОГО САМОЛЕТА-ИСТРЕБИТЕЛЯ | 2010 |
|
RU2418267C1 |
| УНИВЕРСАЛЬНЫЙ СПОСОБ НАВЕДЕНИЯ САМОЛЕТОВ НА НАЗЕМНЫЕ ЦЕЛИ | 2002 |
|
RU2210801C1 |
| СПОСОБ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ГИПЕРЗВУКОВЫЕ ЦЕЛИ | 2009 |
|
RU2408847C1 |
| СИСТЕМА ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ СКРЫТНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В ЗОНЕ ОБНАРУЖЕНИЯ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС | 2017 |
|
RU2686802C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2003 |
|
RU2229671C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2164654C2 |
| СПОСОБ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2148235C1 |
| СПОСОБ СКРЫТНОГО САМОНАВЕДЕНИЯ САМОЛЕТОВ НА ВОЗДУШНЫЕ ОБЪЕКТЫ | 2009 |
|
RU2408845C1 |
| СПОСОБ ПЕРЕХВАТА ВОЗДУШНЫХ ЦЕЛЕЙ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2012 |
|
RU2498342C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2012 |
|
RU2525650C2 |
Изобретение относится к области приборостроения и может найти применение в системах командного наведения летательных аппаратов (ЛА) на наземные объекты, использующих для картографирования земной поверхности бортовые радиолокационные станции (БРЛС), а в качестве средств поражения - ракеты воздух-поверхность (В-П) различного назначения. Технический результат - расширение функциональных возможностей. Для достижения данного результата на борту авиационного комплекса радиолокационного дозора и наведения одновременно измеряются собственные координаты местоположения, дальность до цели и дальность до наводимого ЛА и их азимуты. Определяются требуемые значения бортового пеленга цели с наводимого ЛА, угловой скорости линии визирования цели, расстояния между целью и наводимым ЛА и его скорость, по которым формируют сигнал требуемого курса наводимого ЛА. 3 з.п. ф-лы, 4 ил.
1. Способ командного наведения летательного аппарата (ЛА) на наземные цели, заключающийся в том, что на борту авиационного комплекса радиолокационного дозора и наведения (АК РЛДН) одновременно измеряются собственные координаты местоположения xак, zак, дальность до цели ДСЦ и ее азимут φЦ, дальность до наводимого ЛА ДС и его азимут φс, определяются требуемые значения бортового пеленга цели φТ с наводимого ЛА, угловой скорости линии визирования (УСЛВ) цели ωТ, расстояние между целью и наводимым ЛА ДСЦ, его скорость VC, по которым формируется сигнал требуемого курса в виде алгебраической суммы его значения на предыдущем такте и взвешенных на соответствующие коэффициенты усиления значения ошибок наведения по бортовому пеленгу и угловой скорости линии визирования:

где ψТ(k) и ψТ(k-1) - требуемое значение курса в k-й и (k-1)-й моменты времени, отстоящие друг от друга на интервал Т передачи команд на борт наводимого ЛА;
Т - период обзора радиолокационной станции (РЛС) АК РЛДН;
qφ и qω - коэффициенты, определяющие точность наведения соответственно по бортовому пеленгу и УСЛВ цели;
Kψ - коэффициент, определяющий максимальную величину крена наводимого ЛА при отработке значений при максимальных ошибках наведения;
 и
и  - оценки текущих значений бортового пеленга и угловой скорости линии визирования цели.
- оценки текущих значений бортового пеленга и угловой скорости линии визирования цели.
2. Способ по п.1, отличающийся тем, что при использовании бортовой радиолокационной станции (БРЛС) наводимого ЛА в режиме обычного луча (ОЛ) или применения неуправляемого оружия, оружия с некогерентными радиолокационными головками самонаведения (РГС) требуемое значение бортового пеленга (φT) и угловой скорости (ωT) линии визирования определяется как:
φT=0, ωT=0.
3. Способ по п.1, отличающийся тем, что при использовании БРЛС наводимого ЛА в режиме доплеровского обострения луча (ДОЛ) или фокусированного синтезирования апертуры антенны (ФСА) требуемое значение бортового пеленга и угловой скорости линии визирования определяется как:

где ДСЦЗ и φЗ - заданные (известные) значения дальности от наводимого ЛА до цели и ее бортового пеленга, на которых необходимо включить его БРЛС;
λ и ΔF - длина волны БРЛС и полоса пропускания ее доплеровского фильтра;
ΔlT - требуемая линейная разрешающая способность БРЛС по азимуту.
4. Способ по п.1, отличающийся тем, что при использовании оружия с когерентными РГС, способными работать в режиме ДОЛ или ФСА, требуемое значение бортового пеленга и угловой скорости линии визирования определяется как:
где ДР - дальность пуска ракеты;
λР и ΔFP - длина волны РГС и полоса пропускания ее доплеровского фильтра;
ΔlТР - требуемое линейное разрешение РГС по азимуту.
| МЕРКУЛОВ В.И., ДРОГАЛИН В.В., КАНАЩЕНКОВ А.И | |||
| и др | |||
| Авиационные системы радиоуправления | |||
| Радиоэлектронные системы самонаведения | |||
| / Под ред | |||
| А.И | |||
| КАНАЩЕНКОВА и В.И | |||
| МЕРКУЛОВА - М.: Радиотехника, 2003, т.2, с.15-22 | |||
| МЕРКУЛОВ В.И., ДРОГАЛИН В.В., КАНАЩЕНКОВ А.И | |||
| и др | |||
| Авиационные системы радиоуправления | |||
| Принципы построения систем радиоуправления. |

