Изобретение относится к области гироскопическоя техники и может быть использовано при разработке гироскопического измерителя угловых отклонений от вертикали и поперечных ускорений.
Известна гиросистема, содержащая пару одинаковых поплавковых гидродинамических гироскопов с двухкоординатными датчиками угла и смещенным центром масс чувствительного элемента, четыре сумматора, причем выходы датчика угла первого гироскопа подключены к суммирующим входам первого и третьего сумматоров и инверсным входам второго и четвертого сумматоров, выходы датчика угла второго гироскопа подключены к суммирующим входам второго и четвертого сумматоров и суммирующим входам первого и третьего сумматоров, при этом гироскопы имеют единый привод, вертикально расположенные оси собственного вращения соосны и кинематически связаны, а их сферические поплавки выполнены со смещением вдоль оси собственного вращения центров масс в притивоположных направлениях, направление кинетических моментов совпадает, при этом в него дополнительно введены два интегратора и усилительно-апериодических звена, четыре сумматора, причем суммирующие входы пятого и седьмого сумматоров подключены через усилительно-апериодические звенья и интеграторы к выходам первого и третьего сумматоров, а суммирующие входы шестого и восьмого сумматоров в соединены с выходами второго и четвертого сумматоров, соответственно, причем выходы второго второго и четвертого сумматоров соединены, соответственно, с суммирующим входом седьмого и инверсным входом пятого сумматоров, а выходы пятого и седьмого сумматоров соединены, соответственно, с суммирующим входом восьмого и инверсным входом шестого сумматоров, кроме того, усилительно-апериодические звенья выполнены с коэффициентом усиления, равным  постоянной времени Т, равной постоянной времени поплавкового гидродинамического гироскопа, где l - величина смещения центра масс поплавков, m - масса поплавков, g - ускорение силы тяжести b - коэффициент жидкостного вязкого демпфирования, Ω - угловая скорость собственного вращения поплавков.
постоянной времени Т, равной постоянной времени поплавкового гидродинамического гироскопа, где l - величина смещения центра масс поплавков, m - масса поплавков, g - ускорение силы тяжести b - коэффициент жидкостного вязкого демпфирования, Ω - угловая скорость собственного вращения поплавков.
Недостатком данного технического решения, выбранного за прототип, является сравнительная сложность конструкции. При этом при действии поперечных ускорений, превышающих даже незначительно диапазон измерения ускорений, за счет взаимодействия поплавка и механического устройства его центрирования, информация об угловых движениях основания будет искажена. Кроме того, за счет кинематической связи между элементами /т.е. между гироскопами за счет единого привода/ при настройке системы возникают трудности обеспечения идентичности гироблоков до коэффициентам перначи каналов углового и поступательного движения измерителя.
Цель технического решения - упрощение измерителя.
Сущность изобретения сводится к реализации измерителя на базе парк гидродинамических гироскопов, только в одном из которых смещен центр масс вдоль оси собственного вращения, причем каждый из них имеет собственный привод. Следствием данной совокупности признаков является упрощение конструкции "механики" и блока преобразования информации.
Поставленная цель достигается тем, что гироскопический измеритель параметров движения, содержащий два поплавковых сферических гироскопа с двухкоординатными датчиками угла и смещенным центром масс ротора одного из гироскопов в направлении вектора кинетического момента и блок преобразования информации с четырьмя входами и четырьмя выходами, включающий в себя четыре сумматора, два апериодических усилителя и два интегратора, при этом оси вращения гироскопов соосны или параллельны заданному направлению, а выходы датчиков угла гироскопов соединены с четырьмя входами блока пре образования информации, дополнительно включает следующие новые признаки - первый вход блока преобразования информации через последовательно соединенные первый апериодический усилитель, первый интегратор и третий сумматор соединен с первым выходом блока преобразования информации, второй вход этого блока соединен через последовательно соединенные первый и четвертый, сумматоры со вторым выходом блока преобразования информации, третий вход этого блока соединен через последовательно соединенные второй апериодический усилитель, второй интегратор и четвертый сумматор со вторым выходом блока преобразования информации, четвертый вход этого блока соединен через последовательно соединенные второй сумматор и инверсный вход третьего сумматора с первым выходом блока преобразования информации, при этом первым вход блока преобразованная информации дополнительно соединен с инверсным входом первого сумматора и третьим выходом блока преобразования информации, а третий вход этого блока дополнительно соединен с инверсным входом второго сумматора и четвертым выходом блока преобразования информации.
Параметры схемы апериодического усилителя выбираются с учетом равенства коэффициента передачи  а постоянной времени Т равной постоянной времени поплавковых гидродинамических гироскопов, где l - аксиальное смещение центра масс сферического поплавка одного из гидродинамических гироскопов, m - масса поплавков, g - ускорение силы тяжести, b - коэффициент жидкостного демпфирования, Ω - угловая скорость собственного вращения поплавков.
а постоянной времени Т равной постоянной времени поплавковых гидродинамических гироскопов, где l - аксиальное смещение центра масс сферического поплавка одного из гидродинамических гироскопов, m - масса поплавков, g - ускорение силы тяжести, b - коэффициент жидкостного демпфирования, Ω - угловая скорость собственного вращения поплавков.
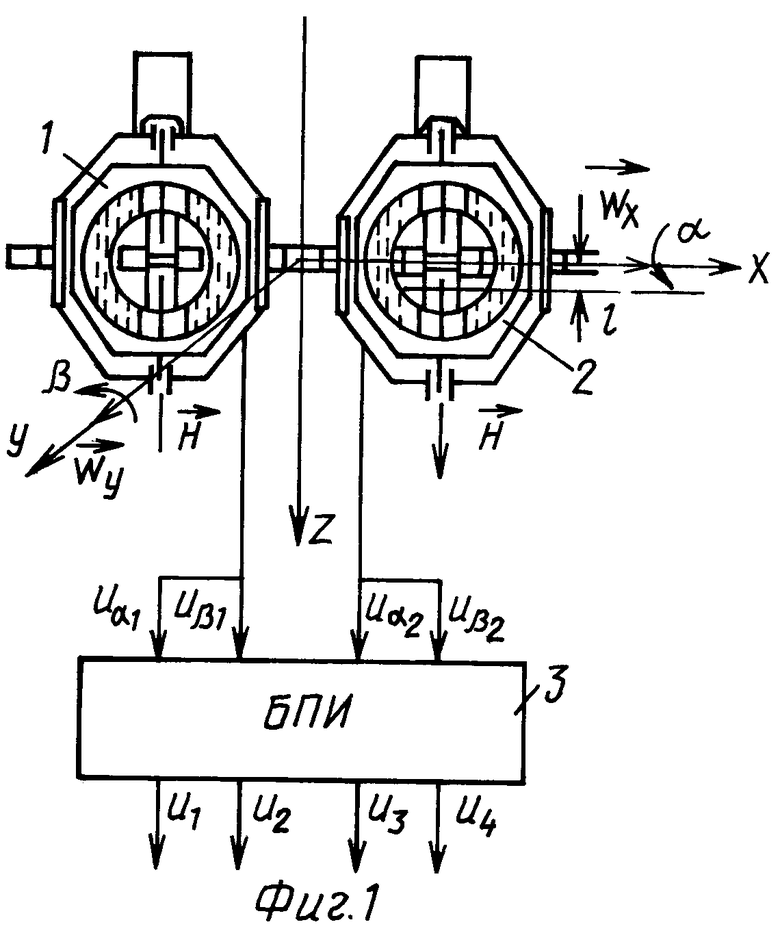
На фиг, 1 представлена схема механической части предложенного измерителя.
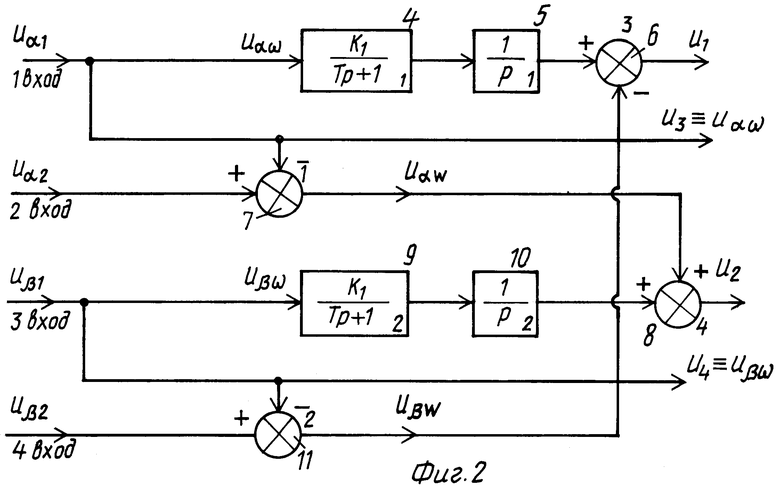
На фиг. 2 изображена схема блока преобразования информации измерителя.
Гироскопический измеритель параметров движения, содержащий два поплавковых сферических гироскопа 1, 2 с двухкоординатными датчиками угла и смещенным центром масс ротора одного из гироскопов в направлении вектора кинетического момента и блок преобразования информации 3 с четырьмя входами и четырьмя выходами, включающий в себя четыре сумматора 6, 7, 8, 11, два апериодических усилителя 4, 9 и два интегратора 5 и 10, при этом оси вращения гироскопов 1, 2 соосны или параллельны заданному направлению, а выходы датчиков угла гироскопов соединены с четырьмя входами блока преобразования информации 3, причем первый вход блока преобразования информации 3 через последовательно соединенные первый апериодический усилитель 4 первый интегратор 5 и третий сумматоры соединен с первым выходом блока преобразования информации 3, второй вход этого блока соединен через последовательно соединенные первый 7 и четвертый 8 сумматоры со вторым выходом блока преобразования информации, третий вход этого блока соединен через последовательно соединенные второй апериодический усилитель 9, второй интегратор 10 и четвертый сумматор 8 со вторым выходом блока преобразования информации, четвертый вход этого блока соединен через последовательно соединенные второй сумматор 11 и инверсный вход третьего сумматора 6 с первым выходом блока преобразования информации, при этом первый вход блока преобразования информации 3 дополнительно соединен с инверсным входом первого сумматора 7 и третьим выходом блока преобразования информации, а третий вход этого блока дополнительно соединен с инверсным входом второго сумматора 11 и четвертым выходом блока преобразования информации.
Рассмотрим работу гироскопического измерителя параметров движения как гироскопического измерителя угловых отклонений от вертикали и поперечных ускорений. Пусть у гироблока 1 отсутствует маятниковость /смещение центра масс вдоль оси собственного вращения/, а в гироблоке 2 имеется аксиальное смещение центра масс,
Линейные прецессионные уравнения гироблока 2 запишем в виде

Применяя прямое преобразование Лапласса при нулевых начальных условиях к этим уравнениям, получим

где 
для определения α2 и β2 находим

Полагая, что k2 m<<1, получаем

Для гироскопа 1 уравнения движения имеют вид:
Из /8/ применгл прямое преобразования Лаяласса, имеем
Выходные напряжения датчиков углов гироблоков с учетом К - крутизны, представляются в виде:
Для определения параметров углового движения определяются следующие сигналы:

Для оценки параметров поступательного движения находятся следующие вспомогательные напряжения


Соотношения /10-13/ назовем вычислениями 1 этапа.
Введем в рассмотрение звенья цепи компенсации  , где К1 - коэффициент усиления, постоянная времени Т - постоянная времени гироскопов, ток тогда при Тк1=Кm вычисления II этапа будут следующие:
, где К1 - коэффициент усиления, постоянная времени Т - постоянная времени гироскопов, ток тогда при Тк1=Кm вычисления II этапа будут следующие:
где 
Таким образом, выходные сигналы гироскопического измерителя параметров движения будут по ускорениям U1, U2, а по угловым движениям U3, U4.
Другими словами, при движении основания, где установлен предложенный измеритель, вдоль вертикали один из гироскопов формирует сигналы только о поступательных его перемещения, а при помощи пары приборов выделяется совокупность напряжений об угловых движениях основания.
Использование предложенного измерителя позволяет упростить конструкцию известного гироприбора, обеспечить упрощение настройки каналов измерителя с точки зрения их идентичности. Кроме того, применение в спарке гироскопов одного без смещения центра масс позволит независимо от величин ускорений непосредственно измерять угловые движения основания. При этом практически исключаются возможные погрешности, обусловленные механическим взаимодействием элементов центрирующего устройства из-за превышения действующих ускорений верхней граница диапазона измерения.
Изобретение относится к области гироскопической техники и может быть использовано при разработке гироскопического измерителя угловых отклонений от вертикали и поперечных ускорений. Измеритель содержит два поплавковых сферических гироскопа с двухкоординатными датчиками угла и смещенным центром масс ротора одного из гироскопов в направлении вектора кинетического момента и блок преобразования информации, включающий четыре сумматора, два интегратора и два апериодических усилителя с коэффициентом передачи  и постоянной времени Т, равной постоянной времени поплавковых гироскопов, где l - аксиальное смещение центра масс сферического поплавка одного из гироскопов, m - масса поплавков, g - ускорение силы тяжести, b - коэффициент жидкостного демпфирования, Ω - угловая скорость собственного вращения поплавков. Техническим результатом является упрощение измерителя. 2 ил.
и постоянной времени Т, равной постоянной времени поплавковых гироскопов, где l - аксиальное смещение центра масс сферического поплавка одного из гироскопов, m - масса поплавков, g - ускорение силы тяжести, b - коэффициент жидкостного демпфирования, Ω - угловая скорость собственного вращения поплавков. Техническим результатом является упрощение измерителя. 2 ил.
Гироскопический измеритель параметров движения, содержащий два поплавковых сферических гироскопа с двухкоординатными датчиками угла и смещенным центром масс ротора одного из гироскопов в направлении вектора кинетического момента и блок преобразования информации с четырьмя входами и четырьмя выходами, включающий в себя четыре сумматора, два апериодических усилителя и два интегратора, при этом оси вращения гироскопов соосны или параллельны заданному направлению, а выходы датчиков угла гироскопов соединены с четырьмя входами блока преобразования информации, отличающийся тем, что, с целью упрощения измерителя, первый вход блока преобразования информации через последовательно соединенные первый апериодический усилитель, первый интегратор и третий сумматор соединен с первым выходом блока преобразования информации, второй вход этого блока соединен через последовательно соединенные первый и четвертый сумматоры со вторым выходом блока преобразования информации, третий вход этого блока соединен через последовательно соединенные второй апериодический усилитель, второй интегратор и четвертый сумматор со вторым выходом блока преобразования информации, четвертый вход этого блока соединен через последовательно соединенные второй сумматор и инверсный вход третьего сумматора с первым выходом блока преобразования информации, при этом первый вход блока преобразования информации дополнительно соединен с инверсным входом первого сумматора и третьим выходом блока преобразования информации, а третий вход этого блока дополнительно соединен с инверсным входом второго сумматора и четвертым выходом блока преобразования информации.
| Прибор для проявления при дневном свете | 1924 |
|
SU783A1 |
| ГОРЕНШТЕЙН И.А | |||
| Гидродинамические гироскопы | |||
| М.: Машиностроение, 1977, с.8 | |||
| US 3657931 А, 25.04.1972 | |||
| US 3935644 A, 03.02.1976. | |||

