Техническое решение относится к области гироскопической техники и может быть использовано при проведении испытаний и настройки датчиков угловой скорости как с аналоговым, так и с дискретным выходом. При этом датчики угловой скорости с аналоговым выходом.
Известны датчики угловой скорости с дискретным выходом (ДУС-ДВ) из /1/ и /2/. Применительно для таких приборов разработано техническое решение, т.к. в этих статьях не приводятся сведения о методиках проведения испытаний приборов инерциального класса. В этих статьях идет речь о проблемах, решенных разработчиками при создании поплавковых датчиков угловых скоростей с дискретным выходом. Разработанное техническое решение восполняет пробел по проведению испытаний собранных ДУС-ДВ.
Важнейшими параметрами ДУС-ДВ, определяющими их точность и работоспособность, являются: дрейф ДУС-ДВ, включающий определение постоянной и случайной его составляющей при различных положениях прибора относительно поля силы тяжести и проекций угловой скорости вращения Земли; масштабный коэффициент, определяющий цену выходного информационного импульса на дискретном выходе ДУС-ДВ при различных входных угловых воздействиях; показатель колебательности ДУС-ДВ, характеризующий резонансные свойства прибора как звена системы автоматики, и угол юстировки ДУС-ДВ, характеризующий точность установки прибора относительно осей чувствительности блока датчиков угловых скоростей. Данное техническое решение и направлено на определение этих параметров и настройку ДУС-ДВ в блоке датчиков угловых скоростей с дискретным выходом.
Задачей всего комплекса решений является определение важнейших параметров и настройка датчиков угловой скорости с дискретным выходом в составе блока таких приборов, определяющих их точность и работоспособность, как чувствительных элементов бесплатформенной навигационной системы (БИНС).
Техническое решение: "Способ настройки датчика угловой скорости с дискретным выходом в блоке".
Прототипом для данной части технического решения является (стр.5 /3.2/) "Способ гидростатического подвеса цилиндрического поплавка в корпусе прибора", включающий размещение в цилиндрической герметичной камере гиромотора, заполнение зазора между цилиндрической камерой и корпусом прибора вязкой несжимаемой жидкостью и обеспечение при этом равенства массы цилиндрического поплавка массе вытесненной им жидкости, а также формирование "электрической пружины" так, что устанавливают на поплавковом узле датчик угла и датчик момента, соединенные между собой усилителем обратной связи с корректирующим контуром.
Недостатком прототипа является отсутствие рекомендаций по осуществлению настройки датчиков угловой скорости с дискретным выходом (ДУС-ДВ) в составе блока датчиков угловой скорости (БДУС).
Задачей данной части технического решения является реализация настройки ДУС-ДВ в блоке датчиков угловой скорости.
Решение поставленной задачи состоит в том, что осуществляют гидростатический подвес цилиндрического поплавка в корпусе прибора так, что размещают в цилиндрической герметичной камере гиромотор, заполняют зазор между цилиндрической камерой и корпусом прибора вязкой несжимаемой жидкостью, обеспечивают при этом равенство массы цилиндрического поплавка массе вытесненной им жидкости, а также формирование "электрической пружины" так, что устанавливают на поплавковом узле датчик угла и датчик момента, соединенные между собой усилителем обратной связи с корректирующим контуром, отличающийся тем, что осуществляют определение работоспособности каждого из датчиков в отсутствие входных угловых воздействий, так что определяют чувствительность их к измерению составляющей угловой скорости вращения Земли, осуществляют юстировку каждого из датчиков в блоке, определяют, регулируют показатель колебательности и находят полосу пропускания каждого из датчиков, определяют, регулируют величину и линейность его масштабного коэффициента каждого из датчиков, определяют дрейф каждого из датчиков в зависимости от времени и положения его относительно поля силы тяжести.
Осуществляют юстировку датчика в блоке таким образом, что определяют угол юстировки датчика в блоке, затем изменяют его угловое положение относительно посадочного места путем поворота вокруг его выходной оси до тех пор, пока величина угла юстировки не будет превышать заданного значения.
Регулируют показатель колебательности так, что определяют его после изготовления прибора и изменяют параметры корректирующего контура усилителя обратной связи до момента, когда величина показателя колебательности будет находиться в заданных пределах, определяют ширину полосы пропускания прибора.
Регулируют величину и линейность масштабного коэффициента таким образом, что определяют его для входных имитирующих угловых воздействий ωвх из диапазона -ωВХ max≤ωвх≤+ωВХ max, изменяют форму и амплитуду импульсов тока преобразователя "ток - число импульсов", при этом изменением амплитуды импульсов регулируют величину масштабного коэффициента, а линейность масштабного коэффициента регулируют посредством изменения формы передних и задних фронтов этих импульсов, где -ωВХ max, +ωВХ max - нижняя и верхняя границы диапазона измеряемых угловых скоростей ДУС-ДВ.
Новизна предложенного решения состоит в реализации настройки ДУС-ДВ в блоке ДУС посредством изменения параметров ДУС, поддающихся регулировке. В частности, предложено осуществлять определение и регулировку частотных свойств "электрической пружины" (усилителя обратной связи с корректирующим контуром) посредством изменения показателя колебательности и получения его величины из заданного интервала, например: 1.1<Q<1.3. Настройка частотных свойств осуществляется по традиционной (для автоматики) методике: посредством изменения параметров корректирующего контура - постоянных времени и коэффициента усиления обратной связи.
Предложена методика настройки величины и линейности масштабного коэффициента Км в диапазоне известных входных угловых воздействий (скоростей или имитирующих их входных моментов) для данного ДУС-ДВ. В отличие от применяемой методики формирования линейности масштабного коэффициента /1/ высокоточного прибора модели типа 18IRIG (и его модификации 25IRIG корабля программы "Аполлон") реализованы меры по уменьшению влияния на линейность масштабного коэффициента изменения чувствительности датчика момента от углового положения поплавка относительно нуля датчика угла, которые позволили ограничиться настройкой только величины и линейности масштабного коэффициента посредством изменения масштабного сопротивления в токоформирующих цепях преобразователя "ток датчика момента - число импульсов". Линейность масштабного коэффициента предложено регулировать посредством изменения (уточнения) формы разряжающих интегрирующую емкость импульсов путем подбора соответствующих корректирующих RC-цепей. Таким образом, реализация предложенного решения выгодно отличается от известного способа /1/ в сторону упрощения, сокращения времени проведения испытаний и настройки, что вполне приемлемо для ДУС-ДВ средней точности с шариковыми подшипниками ротора гиромотора. Однако при всех упрощениях конструктивных решений БДУС-ДВ по точностным характеристикам незначительно уступает приборам программы "Аполлон" типа 18IRIG (и его модификации 25IRIG) и до сих пор успешно эксплуатируется на современных челноках, доставляющий груз на МКС совместной с США экспедиции. Как известно, /1/, точностные характеристики гироскопов типа 18IRIG (и его модификации 25IRIG) выглядят следующим образом: линейность и стабильность масштабного коэффициента составляет 0.0001 ррм (0.01%), случайная составляющая скорости дрейфа на уровне 1 meru (0.015 град/ч). При этом применены газодинамические опоры ротора гиромотора и магнитный подвес ЧЭ. Диапазон измеряемых угловых скоростей до 1 рад/с (60 град/с). Безобогревный вариант ДУС-ДВ приобретает следующие характеристики при использовании предложенного способа определения параметров и настройки: линейность масштабного коэффициента 0,05-0,1%, случайная составляющая скорости дрейфа 0,05-0.1 град/ч, величина показателя колебательности находится в пределах 1.1-1.3. Диапазон измеряемых угловых скоростей до 15-20 град/с и может быть увеличен до 60-90 град/с. Применены шариковые подшипники ротора гиромотора и обычный гидростатический подвес поплавка ДУС-ДВ. Стоимость американского прибора несоизмерима высока в сравнении с российским аналогом, настроенным в соответствии с предложенным комплексом технических решений.
Предложена методика юстировки ДУС-ДВ в блоке посредством определения величины угла и последующих последовательных разворотов его до минимизации (обнуления) выходного сигнала ДУС, который не должен им регистрироваться. При этом юстировка предполагает установку ДУС-ДВ непосредственно в БДУС и настройку положения осей прибора относительно осей блока непосредственно по месту его последующего нахождения и функционирования с точностью не хуже единиц угловых секунд.
Обоснование способа настройки ДУС-ДВ в блоке ДУС.
В известных источниках /1/, /2/, /6/, посвященных вопросам проектирования и испытаниям, рекомендации по настройке ДУС-ДВ также отсутствуют. Этот вопрос является определяющим при изготовлении и регулировке заданных в техническом задании характеристик. Так, например, требуется обеспечить показатель колебательности в пределах 1.1-1.3 (стр.67 /4/) как высокоточного звена системы автоматики. При этом необходимо обеспечить заданную величину (например, 6.29 угловых секунд) и линейность масштабного коэффициента на уровне, например, не хуже 0.1% во всем диапазоне входных угловых скоростей -ωВХ max≤ωвх≤+ωВХ max (0-15(20) град/с) и стабильность скорости дрейфа ДУС-ДВ в блоке не хуже ΔωДР=0.1 град/ч (≈7 meru стр.273 /6/), что соответствует ДУС-ДВ средней точности. Под 1 meru (milli-Earth-rate unit) понимают тысячную долю угловой скорости вращения Земли: 15 град/ч / 1000=0.015 град/ч. Точность установки ДУС-ДВ в блоке должна составлять не хуже, например, 10-30 угловых секунд (достаточно жесткие требования).
Для выполнения этих требований необходимы определение параметров каждого из ДУС-ДВ и настройка их в БДУС. Эти параметры предложено определять в соответствии комплексом предложенных выше технических решений. Так, величина и стабильность скорости дрейфа ДУС-ДВ обеспечивается качеством изготовления элементов подшипникового узла ротора гиромотора (см. стр.69 /3.2/), величиной зазора между цилиндрическим поплавком и цилиндрической камерой, где он размещен (на уровне 75-100 мкм), а также выбором конструкции поплавка (с ребрами вдоль образующей или без), вязкостью поддерживающей поплавок жидкости и величиной кинетического момента Но ротора гиромотора и.т.д. Таким образом, стабильность скорости дрейфа обеспечивается выбором параметров подвеса ЧЭ ДУС-ДВ и качеством его изготовления. Поэтому практически дрейф ДУС-ДВ только регистрируется в процессе проведения его испытаний и настройки в течение достаточно длительных интервалов времени, называемых запусками, в пределах 10-48 часов (стр.273 /6/).
Другие же параметры, такие как показатель колебательности M=Q, величина и линейность масштабного коэффициента Км для диапазона измеряемых угловых скоростей и точность установки ДУС-ДВ в блоке поддаются и регулировке и контролируются при изготовлении прибора и при проведении входного контроля потребителем.
Регулирование величины и линейности масштабного коэффициента. Величина масштабного коэффициента как цена в угловых единицах одного информационного импульса ДУС-ДВ является важнейшей характеристикой при построении системы координат БИНС. Поэтому выдерживанию ее с высокой точностью придается определяющее значение. Регулирование данной величины сводится к настройке токоформирующих цепей в преобразователе "ток - число импульсов". Так, в /1/ рассмотрена трехпозиционная импульсная обратная связь по моменту в датчике угловой скорости типа 18IRIG (фиг.11 первоисточника из AIAA №69-848). На фиг.11 представлены аналогичные примененным в ДУС-ДВ токоформирующие цепи. Важным элементом этих цепей является масштабное сопротивление (scale resistor) в стабилизаторе тока (current source). Изменяя его величину, можно установить амплитуду тока, протекающего в датчике момента. Об этом в /1/ ничего не сказано. В приборе 18IRIG применена трехпозиционная импульсная обратная связь по моменту. Сущность работы такой обратной связи раскрыта (с точностью качества англо-русского перевода) в /1/. При формировании положительной входной угловой скорости вокруг оси чувствительности прибора 18IRIG его поплавок отклоняется от своего начального положения и, когда величина отклонения превысит некоторое пороговое значение, подается команда на пару ключей мостового переключателя на пропускание тока в датчике момента. Этот ток, формируя парирующий (равный) момент входному гироскопическому моменту, возвращает поплавок в первоначальное положение. Длительность нахождения поплавкового ЧЭ за границей зоны нечувствительности трехпозиционного порогового устройства стробируется (заполняется) специальными счетными импульсами. Эти счетные импульсы и являются мерой входного углового воздействия.
В российском упрощенном по принципу действия варианте ДУС-ДВ применен безобогревный (нетермостатированный) поплавковый датчик угловой скорости, имеющий ребристый поплавок для увеличения демпфирования вокруг выходной оси поплавка, с преобразователем "ток-число импульсов", использующим в диагонали мостового переключателя интегрирующую емкость С (см. фиг.3), которая по мере накопления заряда на ее обкладках разряжается преобразователем "ток - число импульсов". Эти разряжающие емкость импульсы и являются информационными в каналах положительного" и "отрицательного" вращения. Поэтому формирование их амплитуды и формы передних и задних фронтов является важным с точки зрения величины и линейности масштабного коэффициента соответственно. Масштабный коэффициент ДУС-ДВ определяется по формуле: Км=Кдм Io Т/Н, полученной в обосновании определения Км. Поэтому при постоянной длительности Т разряжающих С импульсов и известной величине коэффициента передачи Кдм датчика момента и кинетического момента Но, изменяя величину масштабного сопротивления, устанавливают величину (амплитуду) разряжающего емкость С тока Io и тем самым формируют заданную величину масштабного коэффициента Км, соответствующую, например, 6.29 угловых секунд.
Сложнее обстоит дело с линейностью масштабного коэффициента во всем диапазоне измерения ДУС-ДВ. Для определения линейности масштабного коэффициента определяют зависимость его от величины входных угловых воздействий при положительном и отрицательном вращении основания в соответствии с предложенным способом. При этом взаимное влияние разряжающих импульсов при различных входных угловых воздействиях является дополнительной причиной нелинейности масштабного коэффициента. Находят среднее значение КмCP для всего диапазона угловых воздействий и определяют отклонения Км от среднего его значения. Далее при регулировке добиваются получения величины отклонений Км от среднего КмCP не превышающих заданной величины в техническом задании (или ТУ на прибор).
В приборе типа 18IMG линейность масштабного коэффициента обеспечивается включением параллельно датчику момента (представляющему собой RL-цепь) RC-цепей, формирующих суммарное сопротивление на участке ДМ, близкое к активному сопротивлению R. Здесь (как показано в /1/) на его линейность влияет масса факторов. Прежде всего, линейность масштабного коэффициента зависит от величины угла отклонения поплавка от своего начального положения. Совмещение максимальной чувствительности датчика момента и нулевого положения датчика угла (см. фиг.5 и 10 первоисточника) для мощного датчика момента является весьма важной задачей. В /1/ предложен и применен комплекс мер по уменьшению нелинейности Км. Для снижения влияния этого фактора в российском исполнении ДУС-ДВ контур обратной связи рассчитан так, что он максимально приближен (с точки зрения автоматики) к астатическому. Т.е. величина угла отклонения поплавка от своего первоначального положения находится в пределах одной угловой минуты для величин угловых скоростей из заданного диапазона измерения. При этом применен значительный коэффициент усиления "электрической пружины". Кроме этого, использован с несколько меньшей, но стабильной по величине изменения напряженности магнитного поля магнит (типа ЮНДК вместо SmCo7) в датчике момента. При этом применяемый датчик момента в ДУС-ДВ использует лишь часть своей мощности. В связи с этим линейность масштабного коэффициента, обусловленная изменениями коэффициента передачи датчика момента Кдм сведена к минимуму. Поэтому незначительная корректировка при помощи RC-цепей передних и задних фронтов разряжающих емкость С импульсов оказалась достаточной для того, чтобы уложиться в заданную величину отклонения масштабного коэффициента от средней величины во всем заданном диапазоне входных угловых воздействий.
Регулирование показателя колебательности ДУС-ДВ.
Здесь для регулирования показателя колебательности применен стандартный для датчиков угловой скорости с "электрической пружиной" прием формирования заданного качества регулирования, описанный, например, в /4/ (стр.81). Первоначально рассчитывают по известным параметрам ДУС-ДВ его динамические характеристики. Устанавливают при сборке усилителя обратной связи с корректирующим контуром расчетные значения параметров контура, затем по результатам измерений Q уточняют параметры корректирующего контура до получения назначенного в задании (или ТУ) показателя колебательности с учетом его изменения от температуры окружающей среды.
Установка ДУС-ДВ в блок датчиков.
Операция размещения ДУС-ДВ в блоке датчиков сводится к определению неточности установки юстировочного приспособления при сборке прибора. При этом предполагается, что уточнение необходимо проводить непосредственно в собранном приборе. Т.к. только регулировка ДУС-ДВ в "посадочном" узле окончательно может быть уточнена в процессе испытаний его в составе уже блока датчиков. В соответствии с предложенным выше способом определяется угол (юстировки) несовпадения оси чувствительности ДУС-ДВ, устанавливаемого в блок, и физической оси его чувствительности в блоке датчиков. Для устремления этого углового рассогласования к нулю предложено изменять угловое положение осей кинетического момента и чувствительности путем разворота ДУС-ДВ на найденный по результатам испытаний угол. По существу, вращая ДУС-ДВ вокруг оси кинетического момента с угловой скоростью p1 добиваются (путем разворота вокруг выходной оси) получения на выходе установленного по месту в блок ДУСа величины выходного сигнала, равного его дрейфу, определенному в отсутствие вращения основания, где установлен блок ДУСов. Так осуществляется юстировка ДУС-ДВ при установке его в БДУС.
Все эти операции выполняются перед окончательным измерением составляющих скорости дрейфа, т.к. именно расположение осей каждого из ДУС-ДВ в блоке определяет положение приборов при определении дрейфа в поле силы тяжести (см. фиг.1).
Следует отметить, что не является принципиальным, какой из параметров ДУС-ДВ регулировать первым: показатель колебательности Q или масштабный коэффициент Км, т.к. масштабный коэффициент, по существу, является статической характеристикой прибора, а показатель колебательности является динамической его характеристикой. Важно, чтобы юстировка ДУС-ДВ в блоке предшествовала определению составляющих скорости дрейфа ДУС-ДВ.
Способ настройки блока датчиков угловой скорости с дискретным выходом для бесплатформенной инерциальной навигационной системы реализуется следующим образом.
Реализуют гидростатический подвес цилиндрического поплавка в корпусе прибора так, что размещают в цилиндрической герметичной камере гиромотор, заполняют зазор между цилиндрической камерой и корпусом прибора вязкой несжимаемой жидкостью, обеспечивают при этом равенство массы цилиндрического поплавка массе вытесненной им жидкости. Данная "объемная" операция предполагает изготовление элементов ДУС-ДВ, сборку его и заполнение жидкостью зазора между поплавком и корпусом прибора. Каждое из действий - это специальные технологии, которые обеспечивают последующую возможность настройки ДУС-ДВ в БДУС.
Формируют "электрическую пружину" так, что устанавливают на поплавковом узле датчик угла и датчик момента, соединенные между собой усилителем обратной связи с корректирующим контуром.
Осуществляют определение работоспособности каждого из датчиков в отсутствие входных угловых воздействий, так что определяют чувствительность их к измерению составляющей угловой скорости вращения Земли.
Осуществляют юстировку каждого из датчиков в блоке.
Определяют, регулируют показатель колебательности и находят полосу пропускания каждого из датчиков.
Определяют, регулируют величину и линейность масштабного коэффициента каждого из датчиков.
Определяют дрейф каждого из датчиков в зависимости от времени и положения его относительно поля силы тяжести.
Осуществляют юстировку датчика в блоке таким образом, что определяют угол юстировки датчика в блоке, затем изменяют его угловое положение относительно посадочного места путем поворота вокруг его выходной оси до тех пор, пока величина угла юстировки не будет превышать заданного значения.
Регулируют показатель колебательности так, что определяют его после изготовления прибора и изменяют параметры корректирующего контура усилителя обратной связи до момента, когда величина показателя колебательности будет находиться в заданных пределах, определяют ширину полосы пропускания прибора.
Регулируют величину и линейность масштабного коэффициента таким образом, что определяют его для входных угловых воздействий, имитирующих соответствующие входные угловые скорости ωвх из диапазона -ωВХ max≤ωвх≤+ωВХ max. Определяют его среднее значение КмCP, находят отклонения Км от среднего и изменяют форму и амплитуду импульсов тока, разряжающих интегрирующую емкость преобразователя "ток - число импульсов", при этом изменением амплитуды импульсов регулируют величину масштабного коэффициента, а линейность масштабного коэффициента регулируют посредством изменения формы передних и задних фронтов этих импульсов, где -ωВХ max, +ωВХ max - нижняя и верхняя границы диапазона измеряемых угловых скоростей ДУС-ДВ. Регулировка линейности Км сводится к уменьшению отклонений величин Км для различных входных угловых воздействий от среднего значения КмCP.
Использование данной части технического решения позволяет решить поставленную задачу - реализовать настройку ДУС-ДВ в блоке датчиков. При этом относительно изготовленного и ненастроенного прибора реализация предложенного способа позволяет обеспечить получение заданных технических характеристик, т.е. повысить точность ДУС-ДВ настроенного по сравнению с ДУС-ДВ после изготовления (технический результат). Технический эффект состоит в том, что перед настройкой оценивают работоспособность прибора после его изготовления посредством определения чувствительности ДУС-ДВ к измерению составляющей угловой скорости вращения Земли. Далее посредством настройки и ДУС-ДВ определяют и регулируют угол юстировки каждого из ДУС в блоке, определяют и обеспечивают получение показателя колебательности в заданных пределах его изменения и ширины полосы пропускания, определяют и регулируют номинальную величину и линейность масштабного коэффициента каждого из ДУС-ДВ из блока. При этом линейность Км регулируют посредством изменения формы передних и задних фронтов импульсов, разряжающих емкость С преобразователя "ток-число импульсов" в цепи обратной связи. В заключении определяют комплекс всех составляющих скорости дрейфа каждого ДУС-ДВ из блока.
"Способ испытаний ДУС-ДВ" при определении его дрейфа. Прототипом для данного технического решения является "Способ измерения дрейфа поплавкового гироскопа в режиме датчика угловой скорости" /3.1/, стр.142. Этот способ заключается в том, что сигнал с датчика угла прибора подается через фазочувствительный усилитель на датчик момента, при этом замеряют ток в датчике момента и определяют величину вредных (возмущающих) моментов вокруг выходной оси прибора в отсутствие входных угловых воздействий.
Недостатком прототипа является то, что указывается, какой параметр необходимо определить в процессе измерений, и не даются рекомендации, как это осуществить, например, для блока датчиков угловой скорости с дискретным выходом при определении постоянной и случайной составляющей скорости дрейфа, не зависящей от ускорения и разбалансировок каждого из ДУС-ДВ из блока.
Задачей данной части технического решения является определение составляющих скорости дрейфа ДУС-ДВ средней точности. Задача решается так, что измеряют ток в обмотке управления датчика момента и определяют при этом возмущающий момент вокруг выходной оси прибора, особенность при этом состоит в том, что дрейф определяют таким образом, что ток в обмотке управления датчика момента преобразуют в число N выходных информационных импульсов, которые суммируют в течение фиксированного промежутка времени t замера, а время замера t выбирают из соотношения: t=КM/ΔωДР, где КM - масштабный коэффициент датчика угловой скорости с дискретным выходом; ΔωДР - желаемая цена одного импульса случайной составляющей скорости дрейфа (град/ч),
повторяют замеры информационных импульсов N n-раз в течение интервала времени Δt запуска и вычисляют среднее число информационных импульсов N*=(1/n) ∑n iNi≡ω* за время Δt, равное скорости дрейфа ω* датчика угловой скорости с дискретным выходом для данного запуска, и случайную составляющую скорости дрейфа  где Nmax i - наибольшее отклонение суммы числа выходных информационных импульсов от среднего значения N*.
где Nmax i - наибольшее отклонение суммы числа выходных информационных импульсов от среднего значения N*.
Дрейф определяют таким образом, что определяют три основные его составляющие (ωH, ωPP, ωAP) в зависимости от расположения выходной оси и оси чувствительности датчика угловой скорости с дискретным выходом относительно поля силы тяжести, определяют эти составляющие скорости дрейфа датчика для каждого из них при собственном вращении носителей кинетического момента всех датчиков из блока, где ωH - независящая от ускорения составляющая скорости дрейфа; ωPP - скорость дрейфа, зависящая от ускорения, обусловленная радиальной разбалансировкой (рр - радиальным смещением центра масс в направлении входной оси) чувствительного элемента; (ωАР - скорость дрейфа, зависящая от ускорения, обусловленная аксиальной разбалансировкой (АР - смещением центра масс в направлении оси собственного вращения).
Независящую от ускорения составляющую скорости дрейфа ωH определяют таким образом, что устанавливают выходную ось датчика вертикально и направляют вниз, а ось чувствительности совмещают с направлением меридиана, проводят замеры чисел информационных импульсов N1i≡ω1i, (I=1...n), затем устанавливают ось чувствительности перпендикулярно меридиану и проводят замеры чисел выходных информационных импульсов NHi≡ωHi, (I=1...n), с использованием которых вычисляют средние значения: ω1*=(1/n)∑n iN1i, ωH*=(1/n)∑n iNнi, затем определяют разность (ω1*-ωH*), по которой судят о качестве изготовления датчиков угловой скорости с дискретным выходом, при этом, если вычисленная разность соответствует горизонтальной составляющей скорости вращения Земли, считают испытуемый датчик угловой скорости с дискретным выходом годным для эксплуатации, если же вычисленное значение разности значительно отличается от фактической для данной широты угловой скорости вращения Земли, то такие датчики отбраковывают, затем для годных датчиков повторяют n раз замеры и запуски m раз и находят среднее значение скорости дрейфа  для проведенных запусков:
для проведенных запусков:
 и вычисляют изменение скорости дрейфа от запуска к запуску:
и вычисляют изменение скорости дрейфа от запуска к запуску:  где
где
(ωH*)i max - наибольшее отклонение скорости дрейфа одного из запусков от среднего значения между запусками 
Скорость дрейфа от запуска к запуску вычисляют в соответствии с соотношением:  а изменение скорости дрейфа от запуска к запуску вычисляют из соотношения:
а изменение скорости дрейфа от запуска к запуску вычисляют из соотношения:  где (ω*i)max - наибольшее отклонение скорости дрейфа одного из запусков от
где (ω*i)max - наибольшее отклонение скорости дрейфа одного из запусков от  - среднего значения между запусками.
- среднего значения между запусками.
Дрейф датчика угловой скорости с дискретным выходом, зависящий от ускорения, обусловленный аксиальной и радиальной разбалансировками, определяют при расположении выходной оси датчика угловой скорости в плоскости горизонта, при этом для определения скорости дрейфа ωРР, обусловленной радиальной разбалансировкой, устанавливают ось чувствительности также горизонтально и перпендикулярно меридиану и проводят замеры и запуски по определению суммарной составляющей скорости дрейфа ω3,, включающую скорость дрейфа, обусловленную радиальной разбалансировкой ωРР, и независящую от ускорения скорость дрейфа  а скорость дрейфа ωРР, определяют в соответствии с соотношением:
а скорость дрейфа ωРР, определяют в соответствии с соотношением:  затем определяют ωAP - скорость дрейфа датчика, обусловленную аксиальной разбалансировкой, при этом ось чувствительности устанавливают вертикально, проводят замеры и запуски и находят
затем определяют ωAP - скорость дрейфа датчика, обусловленную аксиальной разбалансировкой, при этом ось чувствительности устанавливают вертикально, проводят замеры и запуски и находят  - суммарную величину вертикальной составляющей скорости вращения Земли, независящей от ускорения скорости дрейфа и скорости дрейфа, обусловленной аксиальной разбалансировкой, а величину скорости дрейфа ωAP вычисляют по формуле:
- суммарную величину вертикальной составляющей скорости вращения Земли, независящей от ускорения скорости дрейфа и скорости дрейфа, обусловленной аксиальной разбалансировкой, а величину скорости дрейфа ωAP вычисляют по формуле:  где
где
ωЗВ - вертикальная составляющая скорости вращения Земли. Проводят аналогичные проверки для каждого ДУС-ДВ из блока датчика угловой скорости.
Новизна способа испытаний по определению скорости дрейфа состоит в преобразовании тока датчика момента в число информационных импульсов за определенное время замера t, с обоснованным назначением длительности одного замера t скорости дрейфа в зависимости от желаемой цены одного импульса приращения скорости дрейфа в град/ч и величины масштабного коэффициента Км прибора. При этом, например, для масштабного коэффициента Км=6.29 угл.сек и оцениваемой случайной составляющей скорости дрейфа до 0.1 град/ч желаемая цена десятичного разряда найденного числа выходных информационных импульсов должна составлять не менее 0.01 град/ч. Отсюда время t одного замера будет составлять t=6.29/0.01=629 секунд (10.5 минут). Предложена методика оценки наиболее значимых составляющих скорости дрейфа ДУС-ДВ средней точности. При оценке изобретательского уровня нельзя не отметить значимый труд /6/ разработчиков прецизионных приборов из лаборатории Дрейпера Массачусетского Технологического Института, принимавших участие в программе "Аполлон". В главе 15, посвященной испытаниями высокоточных поплавковых приборов для дальнего космоса, описаны возможные варианты способов испытаний двухстепенных поплавковых гироскопов. Представлен способ испытаний в режиме одноосного гиростабилизатора (стр.358). Именно отсюда, руководствуясь рекомендациями (стр.359), может быть выбрана желаемая цена одного импульса при измерении скорости дрейфа. Речь идет о том, что при оценке точности какого-либо параметра точность измерительного оборудования должна быть по крайней мере на порядок выше. С другой стороны, предлагаемый способ испытаний по определению дрейфа ДУС-ДВ предполагает работу его в качестве чувствительного элемента бескарданной инерциальной навигационной системы. Именно поэтому способ определения дрейфа в режиме одноосного гиростабилизатора не в полной мере отражает специфику работы прибора в такой системе. Наиболее близким по технической сущности для сравнения может быть выбран способ "испытаний в режиме обратной связи по моменту" (стр.367). Сущность способа состоит так же, как в прототипе (/3.1/ стр.142), в определении токов датчика момента (стр.369 /6/). По величине тока и калибровочной кривой датчика момента (т.е. коэффициента передачи) определяют момент, необходимый для уравновешивания поплавкового узла в нулевом положении. Там же отмечено, что при калибровке (определении) чувствительности датчика момента ее величина получается путем определения величины тока, необходимого для уравновешивания гироскопического момента, вызываемого горизонтальной составляющей угловой скорости Земли. Для определения моментов, обусловленных тяжением токоподводов, разбалансировками и неравножесткостью (упругой податливостью конструкции гироскопа), измерения производятся при ориентациях входной оси гироскопа на север и на юг. Чувствительность измеряется в классических единицах mery (тысячная доля угловой скорости вращения Земли: 0.015 град/ч) на единицу тока. В /6/ представлена целая комплексная методика оценки скорости дрейфа в сопоставлении с разработанной математической моделью гироскопов (стр.371). На стр.381 /6/ сказано, что на практике выбирают положения стола (основания, где установлен гироскоп), позволяющие найти искомые коэффициенты момента:
Входная ось горизонтальна, выходная ось вертикальна и направлена вверх (определяется суммарная составляющая независящей от ускорения составляющей и зависящей от ускорения составляющей скорости дрейфа, обусловленной конвекцией жидкости в поле силы тяжести, R+gUo).
Входная ось горизонтальна, выходная ось вертикальна и направлена вниз (определяется суммарная составляющая независящей от ускорения и зависящей от ускорения составляющей скорости дрейфа, обусловленной конвекцией жидкости в поле силы тяжести R-gUo).
Входная ось вертикальна (определяется суммарная составляющая независящей от ускорения и составляющей, обусловленной аксиальной разбалансировкой R+gUs).
Входная ось горизонтальна, выходная ось горизонтальна (определяется суммарная составляющая независящей от ускорения и зависящей от ускорения составляющей скорости дрейфа, обусловленной радиальной разбалансировкой R+gUi).
Входная ось параллельна земной оси, выходная ось горизонтальна (определяется суммарная составляющая скорости дрейфа, независящей от ускорения, зависящей от ускорения и зависящей от квадрата ускорения (т.е. от влияния упругой податливости конструкции прибора).
Здесь следует привести соответствие обозначений, применяемых в /6/ и используемых в отечественном приборостроении: R - возмущающий момент относительно выходной оси датчика, соответствующий независящей от ускорения составляющей скорости дрейфа (ωH) (например, обусловленный тяжением токоподводов и др.); gUs - момент, зависящий от ускорения, обусловленный смещением центра масс в направлении оси собственного вращения, соответствующий аксиальной разбалансировке (ωAP); gUi - момент, зависящий от ускорения, обусловленный смещением центра масс в направлении входной оси (чувствительности) ДУС-ДВ (радиальное смещение центра масс), соответствующий радиальной разбалансировке (ωPP), gUo - момент, обусловленный конвекцией жидкости в поле силы тяжести. Этот момент специально не выделяется в соответствии с предложенным способом, а учитывается вместе с определяемыми разбалансировками.
В предложенном способе имеются некоторые совпадения ориентации гироскопа относительно поля силы тяжести. Так, при определении аксиальной (ωAP (Us в обозначениях /6/) и радиальной ωPP (Ui в обозначениях /6/) разбалансировок расположение осей гироскопа практически не отличаются (по другому их просто не определишь). Отличия состоят в выборе времени замера (рекомендации в /6/ также отсутствуют) и определении независящей от ускорения составляющей скорости дрейфа. При этом с учетом рекомендаций (стр.372 /6/) предложено объединить определяемые составляющие разбалансировок с конвективной составляющей скорости дрейфа. Кроме этого перед непосредственным оцениванием стабильности во времени скорости дрейфа оценивается работоспособность гироскопов посредством оценки способности его измерять ("чувствовать" горизонтальную составляющую угловой скорости вращения Земли). Предложено вначале ориентировать входную ось (ось чувствительности ДУС-ДВ) вдоль горизонтальной составляющей скорости вращения Земли и определять скорость дрейфа, затем устанавливать ее перпендикулярно этой составляющей. Далее предложено оценивать посредством определения разности найденных составляющих соответствует ли она горизонтальной составляющей скорости вращения Земли. Если найденная величина скорости дрейфа соответствует горизонтальной составляющей скорости вращения Земли, то имеет смысл проведение последующих испытаний для исследуемого ДУС-ДВ. В случае значительного отличия выявленные приборы отбраковывают. Годные же ДУСы предложено подвергать последующей комплексной проверке. Кроме этого составляющие скорости дрейфа, обусловленные упругой податливостью конструкции, в соответствии с предложенным способом не оцениваются с целью сокращения времени испытаний и их стоимости (стр.355 /6/), т.к. ДУС-ДВ является измерителем средней точности. При исследовании качества созданной конструкции с целью ее последующей доработки и совершенствования определение скорости дрейфа, обусловленной упругой податливостью конструкции, конечно же имеет важное значение (см. главу 15.2 стр.355 /6/). Предложенное же решение касается проверки изготовленных ДУСов для поставки и использования на борту орбитальных станций и проверки их при проведении входного контроля на предприятии потребителе ДУС-ДВ. Здесь важным фактором, как указывают авторы /6/, является снижение стоимости испытаний и снижение времени работы приборов при проведении их контроля в процессе изготовления и предстартовой подготовки, т.к. все испытания проходят в рамках строго определенного ограниченного ресурса ДУС-ДВ.
Новизна также состоит в том, как именно следует оценивать постоянную составляющую скорости дрейфа и выделять ее случайную составляющую. Предложено постоянную составляющую скорости дрейфа оценивать как среднее значение количества информационных импульсов в течение запуска, состоящего из n замеров, а наибольшее отклонение от среднего значение предложено считать как случайную составляющую скорости дрейфа. Такая методика себя оправдала. Также предложено оценивать среднее значение скорости дрейфа от запуска к запуску и оценивать отклонения ее величины от найденного среднего значения между запусками.
Новизна предложенного решения также состоит в том, что при определении скорости дрейфа каждого из ДУС-ДВ в блоке датчиков угловой скорости моторы остальных гироскопов также работают. Именно в таких условиях функционируют ДУСы в блоке. Особенно это важно для оценки скорости дрейфа поплавковых ДУС-ДВ с опорами роторов гиромоторов, реализованных на шариковых подшипниках. Именно такие опоры применены в ДУС-ДВ средней точности. Эти опоры гиромотора при собственном вращении формируют спектр вынужденных колебаний поплавкового узла ДУС-ДВ и являются причиной формирования постоянной и случайной составляющей скорости дрейфа ДУС-ДВ, называемой иногда "нестабильностью" скорости дрейфа прибора (см. стр.69 /3.2/).
На фиг.1. представлена ориентация относительно сторон горизонта и поля силы тяжести ДУС-ДВ при проведении испытаний по определению составляющих его дрейфа в режиме обратной связи по моменту (по аналогии со стр.382 /6/), причем
(а), (б) - при определении независящей от ускорения составляющей скорости дрейфа;
(в), (г) - при определении зависящей от ускорения скорости дрейфа (обусловленных аксиальным и радиальным смещением центра масс ЧЭ относительно центра его гидростатического подвеса).
На фиг.2 представлено оригинальное устройство, формирующее в автоматическом режиме непрерывный цикл измерения дрейфа за фиксированные промежутки времени t (называемые замерами) и в течение интервалов Δt (называемых запусками). Здесь обозначены:
1 - счетчик, организующий циклическую работу автомата;
2 - счетчик, формирующий время замера t=КM/ΔωДР;
3 - счетчик времени t;
4 - счетчик числа информационных импульсов по каналу "минус" (отрицательного вращения);
5 - счетчик числа информационных импульсов по каналу "плюс" (положительного вращения);
6 - преобразователь уровня.
Все используемые счетчики (1-5) реализованы на базе стандартных счетчиков импульсов типа Ф 5007, Ф5080. Работа автомата, представленного на фиг.2, при измерении дрейфа состоит в следующем.
До начала работы в автоматическом режиме измерения дрейфа на счетчике 1 выставляются числа: N1 - min; N2 - max. Числа N1 и N2 выбираются с учетом периода следования тактовых (внешних или внутренних) импульсов и требуемого времени замера t=КM/ΔωДР, а также времени, необходимого для регистрации проведенных измерений исполнителем или автоматической регистрирующей аппаратурой. Другими словами, интервал времени замера t1 дополнительно увеличивается относительно интервала t на время Δt1≪t, необходимое для записи в протокол испытаний чисел импульсов со счетчиков 4 и 5 или на время печати результатов измерений этих чисел специальным печатающим устройством.
На счетчике 2 выставляются числа: N3 - min; N4 - max. Числа N3 и N4 выставляются с учетом используемой частоты f (или периода 1/f) следования внешних или внутренних тактовых импульсов и обоснованно выбранного времени: t=КM/ΔωДР таким образом, чтобы произведение суммарного их числа на период следования равнялось именно времени t=КM/ΔωДР.
Счетчики имеют стандартные кнопки и входы "СТАРТ", "СТОП" и "СБРОС". Эти кнопки используются для формирования внешних команд "СТАРТ" и (или) СТОП" (при необходимости). При подаче на вход "СТАРТ" 1-го счетчика внешней команды "СТАРТ" открывается вход "А" счетчика и начинается суммирование числа входных тактовых импульсов. Как правило, для этого используется один из источников тактовых частот блока преобразования информации (преобразователя "ток-число импульсов") ДУС-ДВ. При достижении этим счетчиком числа N1 (предварительно занесенного в его память) с выхода min данного счетчика выдается команда (импульс), поступающая на вход "СТАРТ" 2-го счетчика. Вход "А" 2-го счетчика открывается и начинается суммирование числа тактовых входных импульсов, следующих с частотой f.
При достижении 2-м счетчиком числа N3 (предварительно занесенного в его память как "начальная" граница интервала времени t) с выхода min данного счетчика выдается команда (импульс), поступающая на входы "СТАРТ" 3, 4 и 5-го счетчиков. Входы "А" 4-го и 5-го счетчиков открываются и начинается съем сигнала каналов "положительного N+" и "отрицательного N-" вращения с ДУС-ДВ, т.е. осуществляется суммирование:
- счетчиком 4 - числа информационных импульсов по каналу "минус" - "N-";
- счетчиком 5 - числа информационных импульсов по каналу "плюс" - "N+".
Счетчик 3 производит контрольное измерение временного интервала, равного t=КM/ΔωДР.
При достижении 2-м счетчиком числа N4 (предварительно занесенного в память как "конечную" границу интервала времени t) с выхода max данного счетчика выдается команда (импульс), поступающая на входы "СТОП" 3, 4 и 5-го счетчиков, а также на вход "СТОП" 2-го счетчика. Входы "А" 4-го, 5-го и 2-го счетчиков закрываются и прекращается суммирование входных информационных импульсов с ДУС-ДВ. Счетчик 3 прекращает измерение интервала времени t между командами "СТАРТ" и "СТОП", а счетчик 2 прекращает счет входных тактовых импульсов. После чего происходит съем информации со счетчиков 3, 4 и 5 в течение времени Δt1.
При достижении 1-м счетчиком числа N2 (предварительно занесенного в его память как конечную границу цикла измерения t1) с выхода max данного счетчика выдается команда (импульс), поступающая на входы "СБРОС" всех счетчиков и на вход "СТАРТ" 1-го счетчика. Все счетчики обнуляются, и цикл измерения повторяется.
Это же устройство используется для регистрации выходных сигналов при определении показателя колебательности в течение интервалов времени t и частоты пропускания, измерения масштабного коэффициента механическим и имитационным способом, а также для определения угла юстировки ДУС-ДВ. Как видно из имеющихся функциональных возможностей, предложенный автомат (устройство контроля ДУС-ДВ) универсален.
На фиг.3 представлена функциональная схема испытаний ДУС-ДВ в режиме обратной связи по моменту (по аналогии со стр.361 /6/).
ПГУ - поплавковый гироузел ДУС-ДВ, который является поплавковым двухстепенным гиротахометром с "электрической пружиной";
ДУ, ДМ - датчики угла и момента ДУС-ДВ;
ОУ, ОИ - обмотки управления и имитации ДМ;
ПТ-ЧИ, С - преобразователь "ток-число импульсов", интегрирующая емкость;
N+, N- - выходные информационные импульсы каналов "положительного" и отрицательного" вращения ДУС-ДВ;
УОС - аналоговый усилитель обратной связи ДУС ДВ;
УФВВ - устройство формирования входного воздействия на ДУС-ДВ;
УМ - усилитель мощности;
ИПН, ГСН - источник постоянного напряжения и генератор синусоидального (гармонического) напряжения;
ДУП - датчик угловых перемещений платформы поворотной установки;
θ - угол разворота платформы поворотной установки (ППУ типа МПУ);
Iи - ток имитации входного углового воздействия на ДУС-ДВ;
УРВС - устройство регистрации выходного сигнала ДУС-ДВ (см. фиг.2).
Способ определения дрейфа блока датчиков угловой скорости с дискретным выходом /ДУС-ДВ/ имеет следующую последовательность действий (фиг.1, 2).
Осуществляют собственное вращение одновременно всех носителей кинетических моментов блока датчиков угловой скорости.
Определяют независящую от ускорения составляющую скорости дрейфа ДУС-ДВ (фиг.1а, б). При выполнении этой операции устанавливают выходную ось одного из датчиков вертикально, а ось чувствительности направляют по меридиану (фиг.1б) (т.е. ось чувствительности совмещают с направлением касательной к меридиану) для измерения одновременно горизонтальной составляющей скорости вращения Земли ωЗГ и дрейфа ДУС-ДВ, независящего от ускорения ωН: ω1=ωH+ωЗГ.
При этом определяют суммарный момент вокруг выходной оси ДУС-ДВ, обусловленный технологическими факторами изготовления и горизонтальной составляющей угловой скорости вращения Земли. Этот момент определяют таким образом, что определяют ток обратной связи ("электрической пружины") в обмотке датчика момента. Ток в обмотке управления датчика момента определяют таким образом, что преобразуют его в число выходных информационных импульсов N, которые суммируют в течение фиксированного промежутка времени t.
Время t суммирования этих выходных информационных импульсов выбирают из соотношения: t=КM/ΔωH, где КM - масштабный коэффициент ДУС-ДВ (угл.с./бит); ΔωH - желаемая цена одного импульса случайной составляющей скорости дрейфа (т.е. цена одного разряда 10-й системы исчисления, выраженная через приращение скорости дрейфа (угловых с/с = град/ч).
Так, например, для ДУС-ДВ с масштабным коэффициентом Км=6,29 (угловых секунд/бит) время суммирования (измерения числа) выходных информационных импульсов, при ΔωH=0,01 град/ч составит t=629 секунд (т.е. 10,5 минут). При этом выходная информация ДУС-ДВ на регистрирующей аппаратуре (фиг.2), (т.е. число импульсов), например, при измерении составляющих угловой скорости вращения Земли непосредственно будет выражаться в град/ч.
Повторяют n раз измерение числа Ni (i=1, 2, ... n) выходных информационных импульсов N за фиксированное время t (называемое замерами) в течение интервала времени At (называемого запуском).
Вычисляют среднее значение N* числа выходных информационных импульсов N за время запуска Δt: N1*=(N1+N2+...+Nn)/n=ω1*.
Устанавливают ось чувствительности ДУС-ДВ перпендикулярно меридиану (фиг.1 (а), т.е. перпендикулярно горизонтальной составляющей угловой скорости вращения Земли), для чего разворачивают вокруг вертикальной выходной оси ДУС-ДВ.
Повторно суммируют n раз число выходных информационных импульсов NH за фиксированные промежутки времени t в течение интервала времени Δt.
Вычисляют среднее значение числа выходных информационных импульсов: N*H=(NH1+NH2+...+NHn)/n≡ωH*, где ωH - скорость дрейфа, независящая от ускорения (в град/ч).
Вычисляют разность суммарного дрейфа ω1* и независящего от ускорения ωН*, определенного при расположении оси чувствительности ДУС-ДВ перпендикулярно меридиану: ω1*-ωH*=ωЗГ.
По этой разности судят о качестве изготовления ДУС-ДВ. В случае, если данная разность соответствует (т.е. приблизительно равна) горизонтальной составляющей скорости вращения Земли, считают исследуемый прибор годным к эксплуатации. Если величина разности ω1*-ωH* значительно отличается от величины горизонтальной составляющей угловой скорости вращения Земли ωЗГ, то такие ДУСы отбраковывают.
Замечание. Количество замеров n при определении ω1* и ωH* может быть сведено к минимуму для уменьшения времени испытаний.
Для пригодных к эксплуатации приборов выделяют постоянную составляющую скорости дрейфа, независящую от ускорения, и случайную составляющую скорости дрейфа. Постоянной составляющей считают среднее значение ωH* в запуске (т.е. на интервале времени Δt), а случайной составляющей ΔωH считают наибольшее отклонение (ωH*)max от среднего значения скорости дрейфа ωH* из всей совокупности замеров:
ΔωH=ωH*-(ωH*)max
Повторяют запуски заданное число m раз и определяют среднее значение скорости дрейфа  для проведенных запусков
для проведенных запусков
и изменение величин дрейфа от запуска к запуску ΔωH:
Так определяется скорость дрейфа ДУС, независящего от ускорения 
Далее осуществляют определение дрейфа ДУС, зависящего от ускорения (фиг.1(в), (г), т.е. находят дрейф ДУС, определяемый разбалансировками). Под остаточными разбалансировками понимают скорость дрейфа ДУС, обусловленную смещением центра масс чувствительного элемента относительно центра его гидростатического подвеса /6/. Для ДУС-ДВ с поплавковым гидростатическим подвесом имеют место два типа разбалансировки. Первая разбалансировка, обусловленная смещением центра масс в направлении оси собственного вращения носителя кинетического момента. Вторая - обусловленная радиальным смещением центра масс поплавка относительно выходной оси прибора в направлении оси чувствительности. Оба типа разбалансировки проявляются в поле силы тяжести, когда выходная ось ДУС горизонтальна.
Для определения второй - радиальной разбалансировки устанавливают выходную ось ДУСа горизонтально, а ось чувствительности также размещают в плоскости горизонта перпендикулярно меридиану (при этом направление вектора кинетического момента становится вертикальным и аксиальная разбалансировка не проявляется).
Повторяют измерения за фиксированные промежутки времени t числа выходных информационных импульсов N3i n раз в течение интервала времени Δt данного запуска. Определяют среднее значение N3*≡ω3* как постоянную составляющую скорости дрейфа и наибольшее отклонение ΔN3 max≡Δω3 max от среднего N3*≡ω3* как случайное отклонение от постоянной составляющей скорости дрейфа в данном запуске.
Повторяют запуски заданное число m раз и вычисляют среднее значение  для проведенных запусков:
для проведенных запусков:
и изменение величины дрейфа Δω3 от запуска к запуску:  где (ω3*)i max - наибольшее отклонение от среднего значения от запуска к запуску.
где (ω3*)i max - наибольшее отклонение от среднего значения от запуска к запуску.
Величину радиальной разбалансировки ωPP определяют из соотношения:

Для определения аксиальной (первой) разбалансировки устанавливают выходную ось ДУС-ДВ горизонтально (фиг.1(г)), а ось чувствительности вертикально. В этом положении ось чувствительности (входная ось) направляется вдоль вектора вертикальной составляющей ω3В угловой скорости вращения Земли. Повторяют измерения за фиксированные промежутки времени t число выходных информационных импульсов n раз в течение интервала времени Δt. Определяют среднее значение числа выходных информационных импульсов N2*≡ω2* и наибольшее отклонение этого числа ΔN2 max=Δω2 max от среднего его значения N2*≡ω2* в запуске.
Повторяют запуски заданное число m раз и вычисляют среднее значение  скорости дрейфа для проведенных запусков:
скорости дрейфа для проведенных запусков:
и изменение величины дрейфа ω2 от запуска к запуску:  где (ω2*)i max наибольшее отклонение ω2 от запуска к запуску. Величину аксиальной разбалансировки находят из соотношения
где (ω2*)i max наибольшее отклонение ω2 от запуска к запуску. Величину аксиальной разбалансировки находят из соотношения 
Использование данного технического решения позволяет с минимальными временными трудозатратами определить основные составляющие скорости дрейфа ДУС-ДВ, характеризующие его точность, и позволяет уменьшить время определения их в лабораторных условиях на базе изготовителя и при проведении входного контроля потребителем ДУС-ДВ, а также при проведении предстартовой подготовки (технический результат).
Технический эффект предложенного решения состоит в определении трех основных составляющих скорости дрейфа ДУС-ДВ, определяющих его точность и работоспособность, как чувствительного элемента бесплатформенной инерциальной навигационной системы. Также технический эффект составляет преобразование тока датчика момента в число выходных информационных импульсов и выбор времени замера числа выходных информационных импульсов при проведении длительных запусков по определению стабильности скорости дрейфа в течение времени, эквивалентного времени функционирования ДУС-ДВ на борту орбитальных станций. Предложенное решение отличается от известных аналогов, разработанных для определения скорости дрейфа ДУС-ДВ при проведении испытаний по моменту (/6/ глава 15), в сторону упрощения и оптимизации количества измеряемых величин составляющих дрейфа ДУС-ДВ и времени проведения испытаний. Преобразование тока датчика момента в число выходных информационных импульсов позволяет использовать достижения в развитии дискретной измерительной техники в виде счетчиков импульсов (типа Ф5080, Ф5007) и вычислительной техники (машин типа Саратов-2 и других более современных персональных ЭВМ). Предложенный способ позволяет оценивать дрейф ДУС-ДВ с любой случайной составляющей скорости дрейфа (на уровне 0.01-0.1 град/ч), достаточно обосновано выбрать время замера t и цикла t1.
"Способ испытаний датчика угловой скорости с дискретным выходом" при определении показателя колебательности ДУС-ДВ.
Прототипом для способа испытаний датчика угловой скорости с дискретным выходом при определении показателя колебательности и полосы пропускания является известный "Способ контроля частотных характеристик линейных систем управления" /7/. Сущность способа состоит в подаче гармонического сигнала неизменной амплитуды на контролируемую систему управления и сравнения ее выходного сигнала с допустимыми значениями. Способ отличается тем, что в нем одновременно гармонический сигнал, сформированный монотонно изменяющимся по частоте, подают на частотную модель, измеряют ее выходное напряжение и фиксируют моменты достижение им пороговых значений.
Недостатком прототипа является отсутствие рекомендаций по определению показателя колебательности и полосы пропускания датчика угловой скорости с дискретным выходом (ДУС-ДВ). Общей по функциональному назначению операцией является только "подача входного гармонического сигнала неизменной амплитуды на контролируемую систему управления".
Для определения показателя колебательности (стр.67 /4/) необходимо формирование известного и неизменного по амплитуде входного гармонического воздействия и определение реакции чувствительного элемента на вырабатываемые входные сигналы.
При этом формирование входных сигналов для ДУС-ДВ необходимо реализовать в виде моментов вокруг оси прецессии, вырабатываемых электрическим путем. Это позволит отказаться от применения дорогостоящего и сложного оборудования для формирования входного гармонического воздействия механическим способом.
Определение реакции чувствительного элемента на вырабатываемые входные моменты необходимо реализовать в виде выходного сигнала ДУС-ДВ. Этот сигнал представляет собой совокупность выходных информационных импульсов каналов "положительного" и "отрицательного" вращения, соответствующую формируемому входному воздействию. При этом важным фактором (особенностью, касающейся только ДУС-ДВ) является предварительная оценка стабильности скорости дрейфа испытуемого ДУС-ДВ. Значительная нестабильность скорости дрейфа внесет заметные искажения в результаты измерений показателя колебательности ДУС-ДВ. Только полученная в результате оценки (измерений) скорости дрейфа (с соответствии с предложенным выше способом) определенная стабильность скорости дрейфа (менее наперед заданной) позволит косвенным образом учесть ее (скорость дрейфа) посредством суммирования сигналов каналов "положительного N+" и "отрицательного N-" вращения и выбором (назначением) повышенного времени суммирования этих дискретных выходных сигналов ДУС.
Задачей данной части технического решения является определение показателя колебательности и полосы пропускания ДУС-ДВ.
Задача решается таким образом, что подают гармонический сигнал неизменной амплитуды на контролируемый датчик, при этом особенностью способа является то, что гармонический сигнал формируют в виде тока в обмотке имитации датчика момента в начале испытаний с частотой ω0, где резонансные свойства исследуемого прибора не проявляются, преобразуют выходной сигнал датчика угловой скорости в виде тока обратной связи в обмотке управления датчика момента в число информационных импульсов каналов "положительного" N+ и "отрицательного" N- вращения, суммируют выходные импульсы отдельно каналов "положительного" N+ и "отрицательного" N- вращения в течение заданного промежутка времени t в отсутствие других входных механических воздействий, затем последовательно увеличивают частоту ω тока имитации Iи в обмотке имитации датчика момента, определяют за такие же промежутки времени t суммы выходных информационных импульсов каналов "положительного" N+ и "отрицательного" N- вращения, находят наибольшее значение суммы (N++N-)max и вычисляют показатель колебательности Q датчика по формуле: Q=(N++N-)max/(N++N-)0, далее последовательно увеличивают частоту ω, находят ее значение ωП, где имеет место соотношение:
(N++N-)max/(N++N-)0=0,707 и фиксируют ωП как ширину полосы пропускания датчика угловой скорости с дискретным выходом.
Новизна данной части технического решения состоит том, что предложен способ оценки показателя колебательности применительно для ДУС-ДВ. Особенность предложенного решения состоит в преобразовании выходного тока датчика момента в информационные импульсы, которые суммируют (интегрируют) при определении реакции ЧЭ ДУС-ДВ на входное имитирующее угловое воздействие, изменяющееся по гармоническому закону. Здесь особенность предложенного решения состоит не только в том, что преобразуют сигнал обратной связи (ток в обмотке управления датчика момента) в информационные импульсы, а в осуществлении моделирования (имитации) входного механического воздействия электрическим путем. При этом не требуется специального оборудования для формирования входного механического воздействия на ДУС-ДВ, изменяющегося по гармоническому закону. Другая отличительная особенность решения состоит в том, что при определении показателя колебательности относят суммарные величины выходных сигналов А(ω), зависящих от частоты изменения входного сигнала, не к выходному сигналу А(0), соответствующему "нулевой частоте ω0" его изменения, а к такой частоте, на которой по результатам предварительного расчета резонансные свойства ДУС-ДВ не проявляются. В частности, для реально существующей конструкции ДУС-ДВ для сравнения выбрана частота, равная 1 Гц. При этом не требуется дополнительный учет влияния постоянной составляющей скорости дрейфа ДУС-ДВ на результаты испытаний в отсутствие входного гармонического воздействия и при его формировании.
Предложенное же устройство регистрации выходных сигналов ДУС-ДВ в виде информационных импульсов (фиг.2) имеет близкое по технической сущности название с "Цифровым анализатором частотных характеристик" /8/. Сущность же работы предложенного устройства для реализации способа определения показателя колебательности и полосы пропускания ДУС-ДВ полностью основана на специфике работы ДУС-ДВ.
Общим для известных способов и устройств является лишь то, что во всех известных и предлагаемых устройствах и способах формируют входное воздействие, изменяющееся по гармоническому закону, и определяют реакцию на него исследуемого объекта управления - ДУС-ДВ как элемента автоматики (иначе просто выявить резонансные свойства прибора не представляется возможным).
Таким образом, можно сказать, что предложенный способ определения показателя колебательности имеет мировую новизну, изобретательский уровень, определяемые существенными отличительными признаками, и промышленно применим. Промышленную применимость подтверждает его использование по прямому назначению в промышленности для испытаний серийно выпускаемых ДУС-ДВ.
Обоснование способа испытаний датчика угловой скорости с дискретным выходом при определении показателя колебательности и полосы пропускания ДУС-ДВ (см. фиг.2, 3).
Известно (стр.67 /4/), что показатель колебательности системы, характеризующий ее резонансные свойства определяется как отношение максимального значения амплитудно-частотной характеристики замкнутой системы к ее значению при ω=0: 
Покажем далее, что проводимые измерения выходного сигнала датчика угловой скорости с дискретным выходом в соответствии с предложенным способом позволяют определить именно показатель колебательности исследуемых ДУС-ДВ.
Замечание. Полагаем, что в результате предварительных испытаний получена заданная стабильность скорости дрейфа ДУС-ДВ. Т.е. величина нестабильности возмущающего момента Мв, обусловленного внутренней вибрацией гиромотора в подшипниках качения эллиптического типа (см. стр.69 /3.2/), не превышает заданный уровень и намного меньше величины входного воздействия: ωвх maxН0≫Мв.
Для определения показателя колебательности и полосы пропускания таких ДУС-ДВ в соответствии с предложенным способом и принятыми в автоматике методиками определения частотных характеристик (стр.67 /4/) на вход датчика подается воздействие, изменяющееся по гармоническому (например, синусоидальному) закону. При этом входное воздействие формирует синусоидальный ток, амплитуда которого равняется IИ. Этот ток имитирует действие на датчик входной угловой скорости ωвх, амплитуда которой определяется из соотношения: ωвх max=IИКДМ И/Н0, где КДМ И/Н0 - приведенная к кинетическому моменту Но ДУС-ДВ крутизна обмотки имитации датчика момента,
ωвх=ωвх max·sin(ω0·t), где ω0 - круговая частота изменения входного сигнала. ДУС-ДВ формирует на дискретном выходе информационные импульсы N+ и N-, которые суммируются отдельно друг от друга в течение определенного фиксированного времени t, т.е. ДУС-ДВ интегрирует входное воздействие отдельно в каналах "положительного" и "отрицательного" вращения:
 - входной угол поворота основания, где установлен датчик, т.е. αвх=αвх max·К, где αвх max=ωвх max/ω0 - амплитуда αвх; К - число как результат определенного интегрирования.
- входной угол поворота основания, где установлен датчик, т.е. αвх=αвх max·К, где αвх max=ωвх max/ω0 - амплитуда αвх; К - число как результат определенного интегрирования.
Замечание. К≠0, т.к. интегрирование проводится отдельно по положительным и отрицательным полупериодам входного и выходного воздействия.
Выходная информация ДУС-ДВ за время t представляет собой сумму информационных импульсов канала "положительного" N+ вращения на "положительных" полупериодах гармонического синусоидального воздействия и сумму канала "отрицательного" N" вращения на "отрицательных" полупериодах гармонического синусоидального воздействия: 
Суммируя выходной угол α+ вых и α- вых, находим: αвых=(N++N-)·Км,
где Км - масштабный коэффициент ДУС-ДВ.
Замечание. При определении показателя колебательности можно было бы не осуществлять одновременное суммирование сигналов каналов "положительного" и "отрицательного" вращения и ограничиться только регистрацией сигналов одного из каналов. В этом случае потребовалось бы дополнительное определение величины скорости дрейфа ДУС-ДВ в этом положении прибора и учет его в регистрируемом сигнале. Суммирование выходных сигналов канала "положительного" и "отрицательного" вращения позволяет исключить влияние на результаты испытаний постоянной составляющей скорости дрейфа, а посредством выбора времени измерения уменьшают относительную погрешность измерения показателя колебательности до приемлемых величин, обусловленную нестабильностью скорости дрейфа в течение времени суммирования импульсов каналов "положительного" и "отрицательного" вращения.
С другой стороны, выходной сигнал датчика также изменяется по гармоническому закону 
где αвых max - амплитуда выходного сигнала; К - число как результат определенного интегрирования гармонической функции.
С учетом (2.2) соотношение (2.3) примет вид: αвых max=Км(N++N-)0/К. Так происходит формирование входного αвх и выходного αвых углов ДУС-ДВ на малой частоте ω0 изменение входного и выходного сигналов, где не проявляются резонансные свойства "электрической" пружины ДУС-ДВ.
При изменении частоты ω без изменения амплитуды IИ входного тока имитации ДУС-ДВ и времени измерения t, что соответствует развороту датчика на тот же имитационный угол, что и на частоте ω0, на его выходе формируется выходной сигнал: αвых(ω)=Км(N++N-)ω/К.
Составим далее отношение М=Аmax(ω)/А(ω0→0), где
Аmax(ω→0)=αвых max(ω)/αвх max(ω)=αвых(ω)/αвх(ω)=Км(N++N-)max/К·αвх
Аmax(ω→0)=αвых max(ω0)/αвх max(ω0)/αвых(ω0)/αвх(ω0)=Км(N++N-)0/К·αвх
откуда получим, что показатель колебательности определяется из соотношения: М=(N++N-)max/(N++N-)0≡Q.
Из автоматики известно, что полоса пропускания системы может быть определена в точке ωп амплитудной характеристики, где отношение А(ω)/А(0) будет равняться 0,707. Для рассматриваемого случая при определении полосы пропускания нужно определить частоту ωП (пропускания) изменения входного сигнала, где будет выполняться соотношение: (N++N-)П/(N++N-)0=0,707.
Способ испытаний датчика угловой скорости с дискретным выходом при определении показателя колебательности и полосы пропускания реализуется следующим образом (см. фиг.2, 3).
Замечание. Определение данного параметра осуществляют после того, как проведена отбраковка ДУС-ДВ по величине стабильности независящей от ускорения скорости дрейфа.
Формируют момент вокруг оси прецессии ДУС-ДВ посредством пропускания тока имитации в обмотке датчика момента. При этом ток I и формируют изменяющимся по гармоническому закону в начале с малой по величине частотой ωо (где резонансные свойства "электрической пружины" не проявляются).
Преобразуют посредством преобразователя "ток - число импульсов" (ПТ-ЧИ) выходной сигнал датчика угловой скорости в виде тока обратной связи усилителя обратной связи (УОС) в обмотке управления датчика момента (ДМ) в число информационных импульсов каналов "положительного" N+ и "отрицательного" N- вращения в течение заданного фиксированного промежутка времени t в отсутствии других входных угловых механических воздействий. Вычисляют сумму чисел импульсов: N+ и N-: (N++N-)0 - на частоте ω0. Суммируют выходные импульсы с использованием тех же счетчиков 4 и 5 (фиг.2). Время t задают также посредством счетчика 2 и регистрируют его посредством счетчика 3. Цикл съема сигнала по аналогии, как это происходит при измерении дрейфа ДУС-ДВ, формирует счетчик 1.
Увеличивают последовательно частоту изменения входного тока имитации IИ в обмотке имитации датчика момента (ДМ). При этом амплитуду тока IИ не изменяют. Изменяют частоту входного тока посредством изменения частоты, формируемой генератором синусоидальных (гармонических) напряжений (ГСН).
Определяют за такие же промежутки времени t суммы выходных информационных импульсов каналов "положительного" N+ и "отрицательного" N- вращения.
Находят наибольшее значение суммы (N++N-)max и вычисляют показатель колебательности Q датчика угловой скорости с дискретным выходом по формуле: Q=(N++N-)max/(N++N-)0
Далее последовательно увеличивают частоту ω изменения входного сигнала и находят ее значение ωП, где имеет место соотношение:
(N++N-)П/(N++N-)0=0,707,
и фиксируют ωП как ширину полосы пропускания датчика угловой скорости с дискретным выходом.
Использование предложенного технического решения позволяет наиболее простым и эффективным способом определить показатель колебательности ДУС-ДВ и найти его полосу пропускания. Определение данного параметра необходимо при осуществлении настройки частотных свойств прибора. При этом, как показали результаты экспериментов (испытаний), выявление показателя колебательности М, изменяющегося, например, в пределах от 1.1 до 1.3 вполне осуществимо (технический результат).
Технический эффект предложенного решения состоит в том, что выполняют предложенную совокупность действий:
- формируют ток в обмотке имитации датчика момента, изменяющийся по гармоническому закону в начале испытаний с малой по величине частотой ω0 (где резонансные свойства не проявляются),
- преобразуют выходной сигнал датчика угловой скорости в виде тока обратной связи в обмотке управления датчика момента в число информационных импульсов каналов "положительного" N+ и "отрицательного" N- вращения,
-суммируют выходные импульсы отдельно каналов "положительного" N+ и "отрицательного" N- вращения в течение заданного промежутка времени t в отсутствие других входных механических воздействий,
- последовательно увеличивают частоту ω тока имитации в обмотке имитации датчика момента и определяют за такие же промежутки времени t суммы выходных информационных импульсов каналов "положительного" N+ и "отрицательного" N- вращения, находят наибольшее значение суммы (N++N-)max и вычисляют показатель колебательности Q датчика по формуле:
Q=(N++N-)max/(N++N-)0,
- далее, последовательно увеличивая частоту ω, находят ее значение ωП, где имеет место соотношение: (N++N-)max/(N++N-)0≥0,707, и фиксируют ωП как ширину полосы пропускания датчика угловой скорости с дискретным выходом.
"Способ определения масштабного коэффициента датчика угловой скорости с дискретным выходом".
Прототипом для способа испытаний датчика угловой скорости с дискретным выходом при определении масштабного коэффициента является известный "Способ контроля работоспособности гироприбора" /5/, состоящий в формировании импульсного воздействия гидродинамическому датчику угловых скоростей, в котором резко тормозят вращающуюся с угловой скоростью платформу и определяют при этом реакцию чувствительного элемента гироскопа на практически мгновенное обнуление входного момента. Сущность данного способа сводится к формированию отклоняющих чувствительный элемент моментов вокруг оси прецессии механическим способом и определению реакции чувствительного элемента на определенным образом формируемые входные моменты.
Недостатком прототипа является отсутствие рекомендаций по определению масштабного коэффициента поплавкового датчика угловой скорости с дискретным выходом (ДУС-ДВ). Общими операциями являются только формирование входных моментов вокруг оси прецессии гироскопа и определение реакции его чувствительного элемента на вырабатываемые механическим способом моменты. Для определения масштабного коэффициента ДУС-ДВ необходимо формирование известного (эталонного) входного воздействия и определение величины выходного сигнала ДУС-ДВ, соответствующее этому входному воздействию. Кроме этого, важным элементом при определении масштабного коэффициента является учет скорости дрейфа ДУС-ДВ в течение времени формирования входного углового воздействия.
Задачей данной части технического решения является определение масштабного коэффициента ДУС-ДВ.
Под масштабным коэффициентом Км ДУС-ДВ принято понимать коэффициент пропорциональности между углом поворота θ основания, где установлен датчик, и величиной его выходного сигнала (числом информационных импульсов N), соответствующего этому углу поворота /1/ (scale factor - название, введенное специально для ДУС-ДВ). Даже в этой статье отсутствуют в явном виде рекомендации по определению масштабного коэффициента ДУС-ДВ.
Решение поставленной задачи включает формирование момента вокруг оси прецессии и определение реакции чувствительного элемента на этот входной момент, при этом дополнительно определяют масштабный коэффициент Км механическим способом, осуществляют калибровку обмотки имитации датчика момента, перед формированием входного момента устанавливают датчик угловой скорости на неподвижном основании в положение относительно поля силы тяжести, в котором предполагается определение масштабного коэффициента имитационным способом, преобразуют ток в обмотке управления датчика момента в число информационных импульсов, эти импульсы NДР суммируют в течение фиксированного промежутка времени t1 в отсутствии входных механических воздействий, затем формируют входной момент электрическим путем так, что пропускают постоянный ток IИ заданной величины в обмотке имитации датчика момента с известным коэффициентом передачи обмотки имитации КИ ДМ/Н и определяют при этом выходной сигнал датчика угловой скорости в виде суммы информационных импульсов N за время t2 формирования тока имитации IИ, вычисляют масштабный коэффициент КИ М по формуле:
KИ M=(KИ ДМ/H)·IИ·t2/(N-(NДР·t2/t1)).
Перед определением масштабного коэффициента КИ М имитационным способом определяют масштабный коэффициент КМ механическим способом таким образом, что устанавливают датчик на подвижном основании в положение относительно поля силы тяжести, в котором предполагается последующее определение КМ, при этом совмещают ось чувствительности датчика с осью вращения основания, затем в отсутствие входных угловых воздействий определяют выходной сигнал в виде суммы информационных импульсов N' ДР за фиксированный промежуток времени t' 1, далее разворачивают датчик на фиксированный угол θ=2·π·n (n≥1), вокруг оси чувствительности при этом суммируют выходные информационные импульсы N за время t' 2, вычисляют масштабный коэффициент Км по формуле: КM=θ/(N'-(N' ДР·t' 2/t' 1).
После определения масштабного коэффициента механическим способом Км осуществляют калибровку обмотки имитации датчика момента, для чего определяют отнесенный к кинетическому моменту коэффициент передачи (КИ ДМ/Н) обмотки имитации датчика момента таким образом, что пропускают постоянный ток IИ в этой обмотке, при этом подбирают и измеряют для данного промежутка времени t' 2 величину тока имитации IИ, которая обеспечивает получение на выходе датчика угловой скорости с дискретным выходом количество импульсов (N-(NДР·t2/t1)), равное количеству импульсов (N'-(N' ДР·t' 2/t' 1)), полученному при непосредственном повороте датчика на угол θ, затем вычисляют приведенный коэффициент передачи КИ ДМ/Н обмотки имитации датчика момента в соответствии с соотношением: KИ ДМ/Н=θ/IИ·t' 2.
Замечание. Определение масштабного коэффициента предполагает обязательную работу гиродвигателей всех входящих в блок ДУС-ДВ, т.к. именно вибрация роторов гироморотов в шариковых подшипниках главных опор является причиной формирования одной из значительных по величине составляющих независящей от ускорения скорости дрейфа ωH в каждом из ДУС-ДВ (см. стр.69 /3.2/).
Новизна предложенного решения состоит в осуществлении нового порядка действий исполнителя и новых операций по определению масштабного коэффициента ДУС-ДВ. Предложено определять в начале масштабный коэффициент механическим способом, затем осуществить калибровку катушки имитации входных угловых скоростей и в заключении определять масштабный коэффициент имитационным способом для всего диапазона измерения входных угловых воздействий (скоростей) ДУС-ДВ. В известных источниках информации /1/ и /2/ отсутствуют какие-либо рекомендации по определению масштабного коэффициента не только механическим, а и имитационным способом. При этом предложенное решение, как показали проведенные испытания, позволяет оценивать масштабный коэффициент с точностью не хуже 0.005%, что вполне допустимо для оценки линейности масштабного коэффициента на уровне 0.05-0.1% в диапазоне измеряемых входных угловых скоростей 0-15°/c.
Обоснование математических выражений, внесенных в формулу изобретения "Способ испытаний датчика угловой скорости с дискретным выходом" при определении его масштабного коэффициента.
Известна математическая модель датчика угловой скорости с "электрической пружиной" (стр.64, 65 /3.2/), которым по существу является датчик угловой скорости с дискретным выходом. В таком приборе дополнительно имеется устройство, преобразующее ток обратной связи ("электрической пружины") в информационные импульсы определенной длительности (см. /9/, применительно для акселерометров). Частота следования этих импульсов характеризует величину входной угловой скорости для ДУС-ДВ, а число - угол поворота датчика вокруг входной оси.
В установившемся режиме вращения основания при определении масштабного коэффициента ДУС-ДВ механическим способом уравнение движения поплавка прибора вокруг выходной оси, представляющее собой уравнения баланса моментов, имеет вид: 
где КДМ - коэффициент передачи датчика момента ДУС-ДВ;
i - ток в обмотке датчика момента; Н0 - кинетический момент датчика; p1 - угловая скорость вращения основания вокруг оси чувствительности; МB - возмущающий (вредный) момент вокруг оси прецессии, обусловленный технологическими факторами изготовления ДУС-ДВ и внутренней вибрацией в опорах носителя кинетического момента. Полагая КДМ, Н0, МВ параметрами, не зависящими от времени, интегрируя (1.1)
 , получаем
, получаем 
где КM=КДМ·I0·Т/Н0 - масштабный коэффициент ДУС-ДВ;
 - угол поворота платформы с угловой скоростью p1;
- угол поворота платформы с угловой скоростью p1;
N' - число информационных импульсов ДУС-ДВ, причем
 - возмущающий момент вокруг выходной оси ДУС-ДВ;
- возмущающий момент вокруг выходной оси ДУС-ДВ;
рДР=МВ/Н0 - скорость дрейфа ДУС-ДВ при входной угловой скорости p1=0;
I0, Т - амплитуда и длительность информационных импульсов.
Для определения рДР введена операция суммирования (интегрирования) числа выходных информационных импульсов N' ДР в отсутствие вращения основания (т.е. при p1≡0), где установлен ДУС-ДВ. При определении рДР уравнение моментов вокруг выходной оси приобретает вид: КДМ·i=МB. Выполнение данной операции сводится к суммированию выходных информационных импульсов Nдр за время t' 1: 
откуда находим 
Подставляя (1.3) в (1.2), находим: КM·(N'-N' ДР·t' 2/t' 1)=θ или
КM=θ/(N'-(N' ДР·t' 2)/t' 1.
При определении масштабного коэффициента посредством имитации входного воздействия (вращение основания) пропусканием тока I0 в обмотке имитации датчика момента уравнение моментов (1) приобретает вид:

где КДМ И, Iи - коэффициент передачи и ток обмотки имитации датчика момента ДУС-ДВ.
Предварительно в соответствии с техническим решением определяют скорость дрейфа ДУС-ДВ при отсутствии входного углового воздействия в виде тока имитации (т.е. при IИ=0). Для чего суммируют выходные информационные импульсы NДР в течение времени 
или 
При определении масштабного коэффициента КM И имитационным способом пропускают постоянный по величине ток Iи в обмотке имитации датчика момента и суммируют при этом выходные информационные импульсы в течение времени  Интегрируя (1.5) от 0 до
Интегрируя (1.5) от 0 до  получим:
получим:

С учетом (1.6) запишем (1.5) в виде:  , где КM И=I0·КДМ·Т/Н0 - масштабный коэффициент ДУС-ДВ, определяемый имитационным способом.
, где КM И=I0·КДМ·Т/Н0 - масштабный коэффициент ДУС-ДВ, определяемый имитационным способом.
Из (1.7) находим соотношение для вычисления КМ И при его определении имитационным способом: 
Замечание. При этом следует иметь в виду, что величина приведенной крутизны ДМ КДМ И/Н0 определена при ее калибровке.
Способ испытаний при определении масштабного коэффициента датчика угловой скорости с дискретным выходом реализуется следующим образом (см. фиг.2, 3).
Устанавливают ДУС-ДВ на платформе поворотной установки (ППУ) в положение относительно поля силы тяжести, в котором предполагается последующее определение масштабного коэффициента ДУС-ДВ, при этом совмещают ось чувствительности с осью вращения платформы поворотной установки.
Преобразуют ток в обмотке управления датчика момента (ДМ) в информационные импульсы, в отсутствие входных внешних угловых воздействий определяют выходной сигнал ДУС-ДВ, обусловленный внутренним возмущающим моментом вокруг выходной оси прибора, в виде суммы информационных импульсов N' ДР в течение фиксированного интервала времени t' 1. Импульсы N' ДР фиксируют посредством счетчиков 4 или 5. Время t' 1 задают при помощи счетчика 2 и фиксируют счетчиком 3.
Формируют внешнее входное угловое воздействие в виде вращения основания вокруг входной оси прибора с угловой скоростью ωвх на фиксированный (известный) угол θ и формируют при этом отклоняющий поплавок момент вокруг выходной оси ДУС-ДВ и определяют ток датчика момента, который преобразуют в число N' информационных импульсов за фиксированный промежуток времени t' 2. Эти импульсы суммируют счетчиками 4 и 5 в течение времени t' 2 разворота основания на фиксированный угол θ=360·n, где n - число полных оборотов платформы поворотной установки, причем n≥1.
Отсчет угла поворота ППУ осуществляют при помощи датчика угла поворота (ДУП) платформы поворотной установки. Простейшим может служить стандартный герметичный контакт (геркон), закрепленный, например, на неподвижной части платформы. На самой же платформе устанавливают обычный магнит, который, перемещаясь относительно герметичного контакта, его замыкает и формирует при этом команду на начало отсчета времени t' 2 поворота ППУ и суммирование при этом выходных информационных импульсов N'. Эта команда поступает вход "СТАРТ " счетчика 2, который формирует после отсчета им количества импульсов: N3 - min команду "СТАРТ" на входы "СТАРТ" счетчиков 3, 4 и 5 для определения времени поворота платформы поворотной установки и регистрации (суммирования) числа выходных информационных импульсов с ДУС-ДВ. Далее при развороте ППУ на фиксированный угол θ=360·n повторно (или в третий раз) герметичный контакт замыкается перемещающимся относительно него магнитом. Тем самым формирует команду на измерительный комплекс (вход "СТОП" счетчика 2 фиг. 2) на прекращение съема сигнала с выхода ДУС-ДВ и осуществление регистрации его в протоколе испытаний. Эта команда "СТОП" формирует общую для счетчиков 3, 4 и 5 команду "СТОП" по истечении времени суммирования числа тактовых импульсов (частоты f), соответствующего N4 - max. Далее после регистрации исполнителем (или печатающим устройством) числа выходных информационных импульсов либо по внешней команде осуществляется "СБРОС" показаний, либо в автоматическом режиме при повторном прохождении герметичного контакта относительно магнита формируется команда "СБРОС" показаний счетчиков и цикл измерения (суммирования импульсов с выхода ДУС-ДВ) повторяется. Вычисляют масштабный коэффициент ДУС-ДВ в соответствии с соотношением: Км=θ/(N'-(N' др·t' 2/t' 1)). Повторяют (при необходимости) измерения масштабного коэффициента для угловых скоростей ωвх из диапазона ωmin≤ωвх≤ωmax, где ωmin - минимальная угловая скорость вращения платформы поворотной установки; ωmax - верхняя граница диапазона измерения ДУС-ДВ.
Далее осуществляют калибровку обмотки имитации ДУС-ДВ. При выполнении этой операции формируют внешнее входное воздействие в виде отклоняющего поплавок момента вокруг выходной оси ДУС-ДВ, для чего пропускают фиксированной (известной) величины ток Iи в течение промежутка времени t' 2, который обеспечит получение на входе ДУС-ДВ количество импульсов, равное количеству импульсов, полученных при непосредственном повороте прибора на фиксированный угол θ:
(N-(Nдр·t2/t1))=(N'-(N' др·t' 2/t' 1)).
Ток формируют, например, посредством источника постоянного напряжения (ИПН) и усиления его выходного сигнала усилителем мощности (УМ). Регистрация количества выходных импульсов ДУС-ДВ и времени измерения осуществляется аналогично выше описанному.
Вычисляют приведенную величину коэффициента передачи Кдм и датчика момента по формуле: Кдм и/Н0=θ/Iи·t' 2.
При определении масштабного коэффициента имитационным способом устанавливают ДУС-ДВ на основании (ППУ) в положение относительно поля силы тяжести, в котором предполагается последующее определение масштабного коэффициента.
Повторно определяет в этом положении возмущающий момент (дрейф прибора) относительно выходной оси прибора, для чего суммируют выходные информационные импульсы Nдр в течение фиксированного интервала времени t1. Импульсы фиксируют посредством счетчиков 4 и 5, а время задают на счетчике 2 и фиксируют на счетчике 3.
Повторно формируют входное воздействие в виде отклоняющего поплавок момента вокруг выходной оси прибора. Для чего пропускают ток имитации Iи через обмотку имитации датчика момента ДУС-ДВ и суммируют при этом число выходных информационных импульсов N за время t2 формирования имитационного отклоняющего поплавок момента. Импульсы суммируют посредством счетчиков 4 и 5, а время задают посредством счетчика 2 и регистрируют при помощи счетчика 3.
Вычисляют масштабный коэффициент ДУС-ДВ по формуле:

Задают различные токи I и имитации определяют масштабный коэффициент для различных по величине входных воздействий.
Использование данной части технического решения позволяет определить масштабный коэффициент датчика угловой скорости с дискретным выходом как механическим, так и имитационным способом для всего диапазона измерения входных угловых скоростей ДУС-ДВ. Это дает возможность осуществить настройку величины и линейности масштабного коэффициента ДУС-ДВ по этому основному параметру во всем его диапазоне измеряемых угловых скоростей. Применение данного комплекса операций позволяет осуществить разностороннюю проверку ДУС-ДВ на предприятии-изготовителе прибора и применять впоследствии определение масштабного коэффициента на предприятии-потребителе только наиболее простым имитационным способом, где не требуется высокая квалификация исполнителя (технический и результат).
Технический эффект состоит в определении масштабного коэффициента механическим способом, осуществление калибровки обмотки имитации датчика момента и определении затем масштабного коэффициента имитационным способом во всем диапазоне измерения входных угловых воздействий (скоростей).
Техническое решение: "Способ испытаний датчика угловой скорости с дискретным выходом" при определении угла юстировки.
Прототипом для данного технического решения является "Способ измерения дрейфа поплавкового гироскопа в режиме датчика угловой скорости" /3.1/, стр.142. Этот способ заключается в том, что сигнал с датчика угла прибора подается через фазочувствительный усилитель на датчик момента, при этом замеряют ток в датчике момента и определяют величину вредных (возмущающих) моментов вокруг выходной оси прибора в отсутствие входных угловых воздействий.
Недостатком прототипа является отсутствие рекомендаций по определению угла юстировки датчика угловой скорости с дискретным выходом (ДУС-ДВ).
Общими операциями являются только операции: "сигнал с датчика угла прибора подают через фазочувствительный усилитель на датчик момента, при этом замеряют ток в датчике момента и определяют величину вредных (возмущающих) моментов вокруг выходной оси прибора в отсутствие входных угловых воздействий".
Для определения угла юстировки необходимо дополнительно формирование известного (эталонного) входного воздействия вокруг оси, относительно которой ДУС-ДВ не должен производить регистрацию (измерение) этого входного воздействия и определение величины выходного сигнала, соответствующего этому "вредному" входному воздействию, с целью последующего устранения его влияния на показания ДУС-ДВ.
Задачей данной части технического решения является определение угла юстировки ДУС-ДВ в блоке датчиков.
Решение поставленной задачи включает подачу сигнала с датчика угла прибора через фазочувствительный усилитель на датчик момента, при этом замеряют ток в датчике момента и определяют величину вредных (возмущающих) моментов вокруг выходной оси прибора в отсутствие входных угловых воздействий, имеет особенность такую, что предварительно устанавливают датчик на основании в положение относительно поля силы тяжести, в котором предполагается определение угла юстировки, для чего совмещают направление кинетического момента с осью вращения основания, преобразуют ток в обмотке управления датчика момента в число выходных информационных импульсов, эти импульсы Nдр суммируют в течение времени t1 в отсутствие вращения основания, далее разворачивают датчик вокруг оси кинетического момента на фиксированный угол θ=2·π·n в течение времени t2 и суммируют при этом выходные информационные импульсы N, вычисляют угол юстировки α в соответствии с соотношением: α=КM(N-(NДР·t2/t1))/θ, где КM - масштабный коэффициент датчика угловой скорости с дискретным выходом; n - число полных оборотов платформы поворотной установки, n≥1.
Замечание. Определение угла юстировки α по порядку действий полностью соответствует определению масштабного коэффициента Км механическим способом. Особенность состоит в том, что вращают ДУС-ДВ относительно оси кинетического момента, а не вокруг оси чувствительности прибора.
Новизна данной части технического решения состоит в определении угла юстировки ДУС-ДВ с высокой точностью (нескольких угловых секунд). При этом предложено впервые учитывать дрейф гироскопа и сравнивать величину суммарного выходного сигнала прибора с определенным предварительно дрейфом ДУС-ДВ при вращении его вокруг оси кинетического момента. С случае, если на выходе ДУС-ДВ при вращении основания, где он установлен, вокруг оси собственного вращения (кинетического момента) суммарный выходной сигнал исследуемого ДУС-ДВ соответствует величине дрейфа прибора, то делают заключение, что отклонение оси чувствительности (входной оси) этого ДУС-ДВ в блоке датчиков угловой скорости относительно ее направления, задаваемого "посадочным" местом в блоке ДУС-ДВ, отсутствует. Т.е. ось чувствительности ДУС-ДВ совпадает с осью чувствительности соответствующего канала блока ДУС-ДВ.
При этом предложено преобразовывать ток датчика момента ДУС в выходные информационные импульсы. Как показали результаты испытаний, применение преобразования аналогового сигнала "электрической пружины" ДУС в дискретную форму повышает точность определения угла юстировки ДУС-ДВ в БДУС до уровня порядка 10 угловых секунд.
Обоснование "Способа испытаний датчика угловой скорости с дискретным выходом" при определении угла юстировки.
В соответствии с техническим решением совмещают ось кинетического момента с осью вращения основания (платформы поворотной установки).
Из-за неточности установки юстировочного приспособления в посадочном месте прибора в блоке ДУС-ДВ угловая скорость p1 вращения основания, где установлен блок ДУС-ДВ, будет действовать на датчик как проекция p1sinα, где α - угол юстировки. Как правило, для угла α выполняется соотношение α≪1 и поэтому на ось чувствительности датчика угловой скорости "просочится" угловая скорость p1α.
В соответствии с известной из /3.2/ математической моделью датчика угловой скорости с "электрической пружиной" в установившемся режиме вращения основания при определении угла юстировки α уравнение баланса моментов вокруг выходной оси примет вид: 
где Кдм - коэффициент передачи датчика момента; I - ток в обмотке управления датчика момента; Н0 - кинетический момент датчика; p1 - угловая скорость вращения основания; Мв - возмущающий момент вокруг оси прецессии, обусловленный технологическими факторами изготовления датчика угловой скорости, а также моментом, обусловленным эллиптической вибрацией гиродвигателя в опорах ротора (стр.69 /3.2/).
Перед непосредственным определением угла юстировки α важной операцией является оценка возмущающих моментов вокруг выходной оси датчика, т.е. определение его дрейфа. В рассматриваемом случае величина возмущающего момента Мв соизмерима с величиной входного гироскопического момента Н0·p1α, т.к. α≪1: Мвπ≈Н0·p1α. Уравнение баланса моментов при определении дрейфа датчика угловой скорости с дискретным выходом имеет вид: 
С учетом особенностей работы датчика угловой скорости с дискретным выходом как интегратора входной угловой скорости при определении дрейфа в течение времени t1 суммируются выходные информационные импульсы Nдр. При этом соотношение (4.2) преобразуется после определенного интегрирования в пределах от 0 до t1 следующим образом:

где  - электрический заряд, перемещающийся в обмотке управления датчика момента ДУС-ДВ при протекании в ней тока за время t1, Км=I0·Кдм·Т/Н0 - масштабный коэффициент датчика угловой скорости с дискретным выходом, определяемый механическим или имитационным способом; I0 - амплитуда тока преобразователя ток-число импульсов; Т - длительность этих импульсов.
- электрический заряд, перемещающийся в обмотке управления датчика момента ДУС-ДВ при протекании в ней тока за время t1, Км=I0·Кдм·Т/Н0 - масштабный коэффициент датчика угловой скорости с дискретным выходом, определяемый механическим или имитационным способом; I0 - амплитуда тока преобразователя ток-число импульсов; Т - длительность этих импульсов.
Далее в соответствии с техническим решением осуществляют вращение датчика вокруг оси кинетического момента Н0 и суммируют при этом число выходных информационных импульсов N за время t2 при повороте на угол θ.
Полагая Кдм, Н0, Мв параметрами, не зависящими от времени, и интегрируя (4.1) в пределах от 0 до t2, получаем:
 где
где 
Подставляя (4.3) в (4.4), находим Км·N=θ·α+Км·Nдр (t2/t1), откуда получено внесенное в формулу технического решения соотношение для определения угла юстировки: 
Способ испытаний датчика угловой скорости с дискретным выходом при определении угла юстировки реализуется следующим образом.
Устанавливают датчик угловой скорости с дискретным выходом в положение относительно поля силы тяжести, в котором предполагается последующее определение угла неточности установки оси чувствительности каждого ДУС-ДВ относительно осей чувствительности блока ДУС-ДВ - угла юстировки α.
При выполнении этой операции совмещают направление оси кинетического момента (направление которого указывается на корпусе прибора) с осью вращения основания.
Подают сигнал с датчика угла прибора через фазочувствительный усилитель на датчик момента, при этом замеряют ток в датчике момента и определяют таким образом величину вредных (возмущающих) моментов вокруг выходной оси прибора в отсутствие входных угловых воздействий. Т.е. в отсутствие входных угловых воздействий определяют выходной сигнал ДУС-ДВ, обусловленный внутренними возмущающими моментами вокруг выходной оси в данном положении прибора. При этом выходной сигнал датчика в виде тока обратной связи в обмотке управления датчика момента преобразуют в число выходных информационных импульсов. Эти импульсы Nдр суммируют счетчиками 4 или 5 в течение фиксированного интервала времени t1, которые определяют дрейф ДУС-ДВ в данном положении относительно поля силы тяжести. Время t1 задают посредством счетчика 2 и регистрируют посредством счетчика 3.
Формируют внешнее входное угловое воздействие в виде вращения ДУС-ДВ на ППУ вокруг направления кинетического момента и определяют при этом выходной сигнал его в виде суммы выходных информационных импульсов N в течение времени t2 разворота на фиксированный угол θ=2·π·n (n≥1, где n - число полных оборотов платформы поворотной установки). Вычисляют угол юстировки α по формуле: α=КM(N-(NДР·t2/t1))/θ, где КM - масштабный коэффициент датчика угловой скорости с дискретным выходом. Угол разворота θ отсчитывают при помощи датчика угловых перемещений (ДУП) таким образом, что формируют команду на начало отсчета угла и выходных информационных импульсов в момент прохождения магнита, закрепленного на вращающейся платформе, относительно герметичного контакта, установленного на невращающемся основании. А конечную границу отсчета угла θ формируют также при помощи этого же датчика только после полного одного или нескольких оборотов платформы поворотной установки. Использование данного технического решения позволяет с высокой точностью (порядка нескольких угловых секунд) определять отклонения оси чувствительности ДУС-ДВ относительно положения физической входной оси блока ДУС-ДВ (технический результат).
Технический эффект состоит в определении дрейфа ДУС-ДВ и определении выходного сигнала прибора при вращении его относительно оси кинетического момента, а также в сравнении найденных значений дрейфа и суммарного сигнала ДУС-ДВ, который не должен им регистрироваться, при вращении его относительно оси кинетического момента. Дополнительный технический эффект состоит в вычислении угла юстировки по впервые полученному для него соотношению (4.5).
Список источников для определения уровня техники.
1. Гилмор и Фельдман "Гироскоп с обратной связью по моменту для бескарданных систем", "Вопросы ракетной техники" №9,1970 г. (первоисточник AIAA Paper №69-848).
2. Гелб и Сутерленд "Способы уменьшения ошибок бескарданных систем, вызванных погрешностями гиротахометров", "Вопросы ракетной техники" №6, 1969 г.
3.1. Никитин Е.А., Балашова А.А. Проектирование дифференцирующих и интегрирующих гироскопов и акселерометров, Москва, "Машиностроение", 1969 г., (стр.142, прототип).
3.2. Андейченко К.Н. Динамика поплавковых гироскопов и акселерометров. Москва, "Машиностроение", 1987 г. (прототип).
4. Горбачев А.Л., Красовский А.Я., Николаев А.В., Смирнов А.Н., Соколов В.В. Проектирование и надежность систем автоматики и телемеханики. Минск, "Высшая школа", 1981 г.
5. Авторское свидетельство №395717, G 01 с 19/00 "Способ контроля работоспособности гироприбора" (прототип).
6. У.Ригли, У.Холлистер, У.Денхард, Теория, проектирование и испытания гироскопов. Перевод с английского под редакцией С.А.Харламова, Москва, "Мир", 1972 г. (Глава 15, стр.353-400) (выявленный дополнительно аналог).
7. Авторское свидетельство №661512 от 16.12.77, G 05 B 23/00. "Способ контроля частотных характеристик линейных систем управления". Бюллетень №17 от 5.05.79.
8. Авторское свидетельство №538307 от 13.01.75, G 01 R 23/16. "Цифровой анализатор частотных характеристик". Бюллетень №45 от 5.12.76.
9. Коновалов С.Ф., Никитин Е.А., Селиванова. Гироскопические системы. Часть 3, под ред. Д.С.Пельпора, Москва, "Высшая школа", 1980, (описание преобразователя "ток - число импульсов" с интегрирующей емкостью).
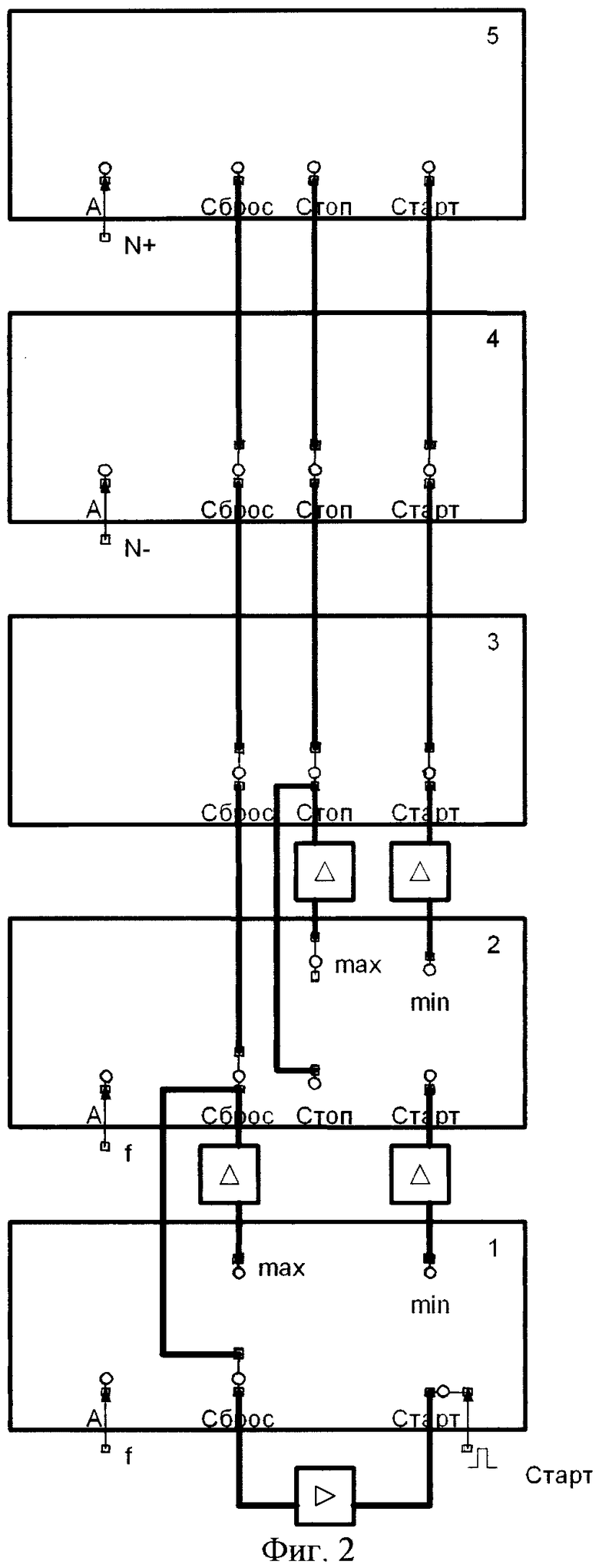
Изобретение относится к области гироскопической техники и предназначено для испытаний и настройки датчиков угловой скорости с дискретным выходом (ДУС-ДВ) для бесплатформенной инерциальной навигационной системы (БИНС). Сущность изобретения: для реализации гидростатического подвеса цилиндрического поплавка в корпусе прибора размещают в цилиндрической герметичной камере гиромотор, заполняют зазор между цилиндрической камерой и корпусом прибора вязкой несжимаемой жидкостью, обеспечивая при этом равенство массы цилиндрического поплавка массе вытесненной им жидкости. Формируют "электрическую пружину", устанавливая на поплавковом узле датчик угла и датчик момента, соединенные между собой усилителем обратной связи с корректирующим контуром. Определяют угол юстировки каждого из датчиков в блоке и минимизируют его путем изменения углового положения его входной оси, определяют и регулируют показатель колебательности и находят полосу пропускания каждого из датчиков, определяют и регулируют величину и линейность масштабного коэффициента каждого из датчиков, определяют скорость дрейфа каждого из датчиков в зависимости от времени и положения его относительно поля силы тяжести. Техническим результатом является обеспечение определения и настройки основных параметров ДУС-ДВ в составе блока ДУС, определяющих их точность и работоспособность как чувствительных элементов БИНС. 5 с. и 9 з.п. ф-лы, 3 ил.
ω1*=(1/n)∑n iN1i, ωH*=(1/n)∑n iNHi,
затем определяют разность (ω1*-ωH*), по которой судят о качестве изготовления датчиков угловой скорости с дискретным выходом, при этом, если вычисленная разность соответствует горизонтальной составляющей скорости вращения Земли, считают испытуемый датчик угловой скорости с дискретным выходом, годным для эксплуатации, если же вычисленное значение разности значительно отличается от фактической для данной широты ω угловой скорости вращения Земли, то такие датчики отбраковывают, затем для годных датчиков повторяют замеры и запуски m раз и находят среднее значение скорости дрейфа ωH для проведенных запусков: ωH*=(1/m)∑m i(ωH*)i, и вычисляют изменение скорости дрейфа от запуска к запуску: ΔωH=|ωH-(ωH*)i max|, где (ωH*)i max - наибольшее отклонение скорости дрейфа одного из запусков от среднего значения между запусками - ωH.
| АНДРЕЙЧЕНКО К.П | |||
| Динамика поплавковых гироскопов и акселерометров, М., Машиностроение, 1987, с.7, 87-104 | |||
| Устройство для измерения угловой скорости | 1990 |
|
SU1830484A1 |
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 1999 |
|
RU2156959C1 |
| СПОСОБ КОНТРОЛЯ ДРЕЙФА ГИРОСКОПИЧЕСКОГО ПРИБОРА | 1994 |
|
RU2115094C1 |
| RU 2191351 C1, 20.10.2002 | |||
| Устройство для определения масштабного коэффициента компенсационного измерителя угловой скорости | 1973 |
|
SU476516A1 |
| Преобразователь время-код | 1985 |
|
SU1310770A1 |
| US 5042256 A, 27.08.1991. | |||

