Изобретения относятся к способам радиолокационного наведения управляемых ракет (УР) на воздушную цель (ВЦ) и могут применяться в радиолокационных системах наведения для защиты объектов от поражения ВЦ, в частности для защиты радиолокационной станции (РЛС) от противорадиолокационных ракет (ПРР).
Известны способ и устройство наведения УР на ВЦ, движущуюся в направлении на защищаемый объект. Способ включает в себя обнаружение ВЦ, пуск УР в направлении на ВЦ, сближение УР с ВЦ, корректировку курса УР в процессе сближения по командам, формируемым на УР, подрыв заряда боевой части (БЧ) УР (Справочник офицера противовоздушной обороны, М., Военное изд-во, 1987, стр.155-168).
Устройство содержит пункт управления УР, включающий радиолокационную станцию (РЛС) обнаружения и бортовую аппаратуру УР (Справочник офицера противовоздушной обороны, М., Военное изд-во, 1987, стр.169).
В известных способе и устройстве реализуется самонаведение УР на ВЦ. Обнаружение ВЦ, оценка дальности до нее и определение момента пуска УР осуществляются с помощью РЛС обнаружения. После захвата ВЦ головкой самонаведения УР производится пуск УР в направлении на ВЦ. В процессе сближения с ВЦ бортовая система управления определяет траекторию движения УР. При достижении УР области срабатывания устройства подрыва БЧ УР производится подрыв БЧ УР.
Недостатком известных способа и устройства является наличие больших динамических ошибок при наведении УР на скоростные ВЦ и малое время контакта УР с ВЦ, определяемое временем нахождения УР и ВЦ в зоне, размер которой определяется радиусом поражения БЧ. Динамические ошибки возникают вследствие конечности быстродействия аппаратуры управления УР, ограниченных возможностей УР по перегрузке и других факторов, ограничивающих маневренные возможности УР (Справочник офицера противовоздушной обороны, М., Военное изд-во, 1987, стр.211). Причиной возникновения перегрузок является большая кривизна траектории, по которой УР сближается со скоростной ВЦ. При наведении УР на скоростную ВЦ динамические ошибки наведения могут оказаться настолько большими, что приведут к срыву процесса наведения и промаху УР. Таким образом, надежного наведения УР на ВЦ, а значит, и надежной защиты объекта от поражения воздушной целью известные технические решения не обеспечивают. Кроме того, даже при минимальных динамических ошибках время нахождения ВЦ в зоне действия заряда БЧ УР (время радиоконтакта взрывателя tк) крайне мало. Оно выражается формулой tк≤rос/ν 0, где rос - максимальный размер области срабатывания БЧ УР, ν 0 - взаимная скорость движения УР и ВЦ в области срабатывания БЧ УР. В результате, если подрыв заряда БЧ УР за время радиоконтакта не произошел (а это возможно, например, если ВЦ прошла зону подрыва по ее краю), то далее траектории УР и ВЦ расходятся и подрыва БЧ не произойдет.
Наиболее близким к заявляемому способу является способ наведения управляемой ракеты (УР) на воздушную цель (ВЦ), движущуюся в направлении на защищаемый объект (фиг.1), включающий обнаружение ВЦ, оценку параметров ее траектории, пуск УР, сближение УР с ВЦ на расстояние срабатывания БЧ УР, корректировку курса УР в процессе сближения, подрыв заряда боевой части УР на расстоянии от защищаемого объекта не менее заданного (DПОДР), (Справочник офицера противовоздушной обороны, М., Военное изд-во, 1987, с.205, пятый абзац и с.205 последний абзац - с.206, первый абзац). Оценка параметров траектории ВЦ, прогнозирование координат области встречи УР с ВЦ, выдача команд для корректировки курса УР могут производится как на пункте управления УР и передаваться на УР в виде команд управления (командный способ наведения), так и осуществляться на самой УР (самонаведение). Возможна и комбинация командного способа наведения и самонаведения, при которой в начале полета управление УР производится по командам с пункта управления УР, а на заключительном этапе осуществляется аппаратурой УР.
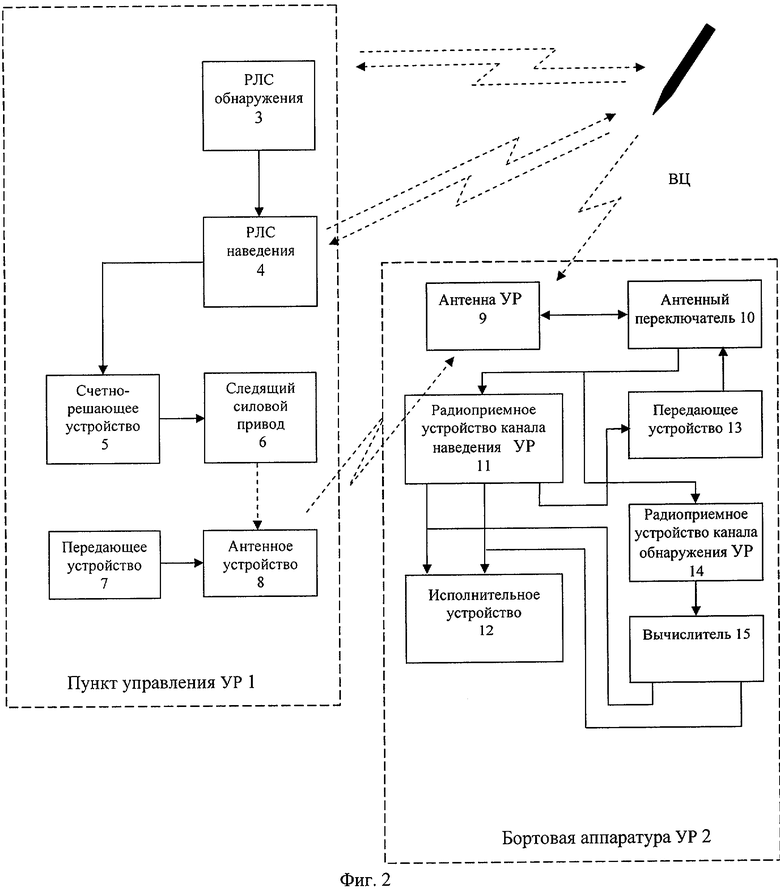
Наиболее близкое устройство, реализующее наиболее близкий способ, представляет собой радиолокационный комплекс (фиг.2), содержащий пункт управления УР 1 и бортовую аппаратуру УР 2 (Типугин В.Н., Вейцель В.А. Радиоуправление, “Сов. радио”, 1962 г., с.135).
Пункт управления УР 1 включает в себя последовательно соединенные радиолокационную станцию обнаружения (РЛС) обнаружения 3, РЛС наведения 4, счетно-решающее устройство 5, следящий силовой привод 6, а также последовательно соединенные передающее устройство 7 и антенное устройство 8, механически соединенное со следящим силовым приводом, бортовая аппаратура УР 2 содержит последовательно соединенные антенну УР 9, радиоприемное устройство канала наведения УР 10, исполнительное устройство 11.
Известный радиолокационный комплекс наведения УР на ВЦ, работает следующим образом. Радиолокационная станция обнаружения 3 осуществляет обзор заданной зоны пространства путем излучения зондирующих и приема отраженных сигналов. При обнаружении ВЦ ее координаты в качестве целеуказания передаются в РЛС наведения 4 пункта управления УР 2. С помощью счетно-решающего устройства 5 вычисляются параметры траектории ВЦ и прогнозируются координаты области встречи УР с ВЦ. С помощью следящего силового привода 6 антенное устройство 8 пункта управления УР 2 разворачивается в направлении на прогнозируемую область встречи. При этом равносигнальная зона диаграммы направленности радиолуча, сформированная с помощью антенного устройства 8, оказывается направленной в данную область пространства. Производится пуск УР. УР движется в равносигнальной зоне радиолуча антенного устройства 8. В процессе сближения УР с ВЦ сигналы, излучаемые антенным устройством 8, принимаются антенной УР 9 и поступают в радиоприемное устройство канала управления УР 10, где они преобразуются в управляющие сигналы. Управляющие сигналы затем подаются на вход исполнительного устройства 11, где формируются два сигнала, пропорциональные отклонениям направления движения УР от направления равносигнальной зоны радиолуча антенного устройства 8 по углу места и азимуту и изменяющие в сторону уменьшения курсовые ошибки наведения УР. РЛС обнаружения 3 производит обнаружение ВЦ периодически - с темпом обновления данных РЛС. С этим же темпом в счетно-решающем устройстве 5 осуществляется уточнение координат области встречи УР с ВЦ и корректируется положение луча антенного устройства 8, за которым следует корректировка курса УР. Таким образом осуществляется наведение УР на ВЦ и сближение с ней до расстояния срабатывания устройства подрыва БЧ УР.
Недостатком наиболее близких способа и устройства, как и аналога, является наличие больших динамических ошибок при наведении УР на скоростные ВЦ. Динамические ошибки возникают вследствие конечности быстродействия аппаратуры управления УР, ограниченных возможностей УР по перегрузке и других факторов, ограничивающих маневренные возможности УР (Справочник офицера противовоздушной обороны, М., Военное изд-во, 1987, стр.211). Причиной возникновения перегрузок является большая кривизна траектории, по которой УР сближается со скоростной ВЦ. При наведении УР на скоростную ВЦ динамические ошибки наведения могут оказаться настолько большими, что приведут к срыву процесса наведения и промаху УР. Следствием больших динамических ошибок является низкая надежность наведения УР на ВЦ, а значит, и низкая надежность защиты объекта от поражения воздушной целью.
Недостатком наиболее близких способа и устройства является также низкая эффективность использования заряда БЧ УР из-за малого времени нахождения ВЦ в области срабатывания заряда БЧ УР, т.е. малого времени радиоконтакта взрывателя БЧ УР с ВЦ.
Отмеченные недостатки являются следствием несовпадения векторов скоростей движения УР и ВЦ на конечном участке наведения УР на ВЦ.
Решаемыми задачами (техническим результатом), таким образом, являются уменьшение динамических ошибок наведения УР на ВЦ и увеличение времени радиоконтакта взрывателя боевой части УР с ВЦ.
Задача решается на основе использования траекторий наведения УР на ВЦ, при которых векторы скоростей движения УР и ВЦ совпадают, и на основе управления скоростью движения УР.
Указанный технический результат достигается тем, что в известном способе наведения управляемой ракеты (УР) на воздушную цель (ВЦ), движущуюся в направлении на защищаемый объект, включающем обнаружение ВЦ, оценку параметров ее траектории, пуск УР, сближение УР с ВЦ, корректировку курса УР в процессе сближения, подрыв заряда боевой части УР на расстоянии от защищаемого объекта не менее заданного (DПОДР), согласно изобретению, сближение УР с ВЦ осуществляют по траектории, совпадающей на конечном участке с прогнозируемой траекторией движения ВЦ в направлении на защищаемый объект, при этом скорость движения УР (VУР) устанавливают на конечном участке траектории меньшей, чем скорость ВЦ (VВЦ).
Указанный технический результат достигается также тем, что скорость УР на конечном участке прогнозируемой траектории устанавливают, исходя из следующего математического соотношения:
где DУР и DВЦ - расстояния соответственно от УР и ВЦ до защищаемого объекта на конечном участке прогнозируемой траектории в момент изменения скорости УР.
Указанный технический результат достигается тем, что в известном способе наведения управляемой ракеты (УР) на воздушную цель (ВЦ), движущуюся в направлении на защищаемый объект, включающем обнаружение ВЦ, оценку параметров ее траектории, пуск УР, сближение УР с ВЦ, корректировку курса УР в процессе сближения, подрыв заряда боевой части УР на расстоянии от защищаемого объекта не менее заданного (DПОДР), согласно изобретению, сближение УР с ВЦ осуществляют по траектории ВЦ, переместившейся в направлении на защищаемый объект, при этом скорость движения УР (VУР) устанавливают на конечном участке траектории большей, чем скорость ВЦ (VВЦ).
Указанный технический результат достигается также тем, что скорость УР на конечном участке траектории устанавливают, исходя из следующего математического соотношения:
где DУР и DВЦ - расстояния соответственно от УР и ВЦ до защищаемого объекта на конечном участке траектории ВЦ, переместившейся в направлении на защищаемый объект, в момент изменения скорости УР.
Указанный технический результат достигается тем, что в радиолокационном комплексе для наведения управляемой ракеты на воздушную цель, содержащем пункт управления УР и бортовую аппаратуру УР, причем пункт управления УР включает в себя последовательно соединенные радиолокационную станцию (РЛС) обнаружения, РЛС наведения, счетно-решающее устройство, следящий силовой привод, а также последовательно соединенные передающее устройство и антенное устройство, механически соединенное со следящим силовым приводом, бортовая аппаратура УР содержит антенну УР, радиоприемное устройство канала наведения УР, исполнительное устройство, согласно изобретению, бортовая аппаратура УР снабжена антенным переключателем, передающим устройством, радиоприемным устройством канала обнаружения, вычислителем, при этом антенна УР соединена со входом/выходом антенного переключателя, вход которого соединен с выходом передающего устройства, а выход - со входом радиоприемного канала наведения УР, два выхода которого соединены соответственно с двумя входами исполнительного устройства для подачи управляющих сигналов корректировки курса УР по углу места и азимуту, а третий выход - с управляющим входом передающего устройства, выход антенного переключателя соединен также со входом радиоприемного устройства канала обнаружения УР, выход которого соединен со входом вычислителя, два выхода которого соединены с первым и вторым входами исполнительного устройства, третий выход вычислителя соединен с третьим входом исполнительного устройства для подачи управляющего сигнала коррекции скорости УР.
Суть предлагаемого способа наведения УР на ВЦ состоит в следующем.
Как уже отмечалось, для известных способов наведения УР на ВЦ характерно одно общее свойство - УР выводится в область встречи с ВЦ на расстояние срабатывания устройства подрыва БЧ У Р. При этом, учитывая, что траектории и скорости УР и ВЦ, как правило, существенно различны (фиг.1), встреча их, действительно, возможна только в небольшой области пространства и короткий момент времени (время радиоконтакта взрывателя боевой части УР с ВЦ мало). Неудача при наведении, т.е. промах УР и отсутствие в связи с этим подрыва БЧ УР, не может быть исправлена, так как после прохождения области встречи траектории УР и ВЦ расходятся. Задача еще более усложняется при ограниченных маневренных возможностях УР и скоростных ВЦ, так как при этом возникают значительные динамические ошибки наведения.
В заявляемых изобретениях создаются условия, чтобы, во-первых, динамические ошибки наведения были наименьшими, во-вторых, сближение УР и ВЦ могло продолжаться не до заранее заданного (соответствующего дальности срабатывания устройства подрыва заряда БЧ УР) расстояния между ними, как это осуществляется в известных технических решениях, а до тех пор, пока не произойдет подрыв БЧ УР, т.е. максимально длительное время. Для этого в заявляемом изобретении наведение УР производится в два этапа.
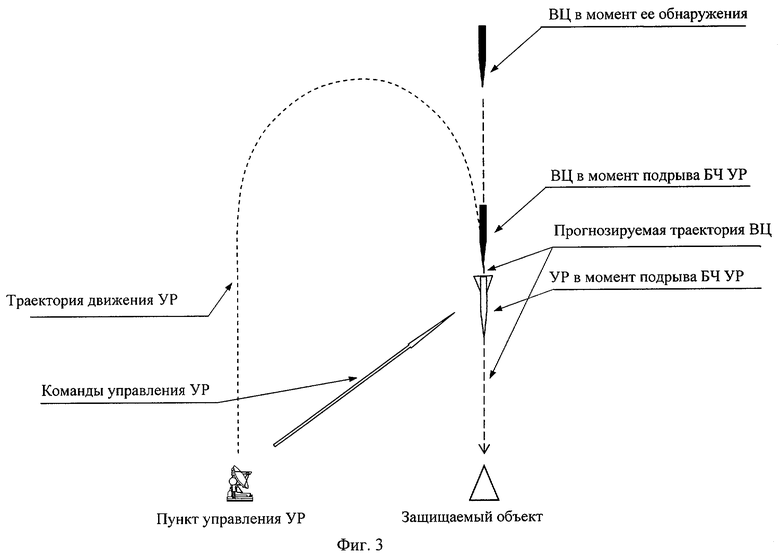
На первом этапе УР выводится на траекторию движения ВЦ. Причем в зависимости от соотношения скоростей УР и ВЦ и от имеющихся возможностей управления скоростью УР УР выводится на прогнозируемую траекторию, то есть перед ВЦ (п.1 формулы изобретения, фиг.3), либо на траекторию ВЦ, переместившейся в направлении на защищаемый объект, т.е. позади ВЦ (п.3 формулы изобретения, фиг.4). В обоих случаях векторы скорости движения УР и ВЦ совпадают и УР движется по прямой, соединяющей ВЦ и защищаемый объект, поэтому ошибки наведения будут невелики. Учитывая, что вывод УР осуществляют на траекторию, которая изменяется не столь интенсивно, как положение области встречи УР с ВЦ, УР находится в состоянии устойчивого полета без значительных поперечных ускорений. Такое движение УР, как известно, характеризуется наименьшими динамическими ошибками (Справочник офицера противовоздушной обороны, М., Военное изд-во, 1987, стр.211, формула (4.14), стр.213, формула (4.16)).
В способе по п.1 и п.2 формулы изобретения сближение УР с ВЦ обеспечивают путем установления на конечном участке скорости движения УР меньшей, чем скорость движения ВЦ (поскольку УР находится между ВЦ и защищаемым объектом, опережая ВЦ), в частности скорость УР на конечном участке прогнозируемой траектории ВЦ выбирают из условия:
где DУР и DВЦ - расстояния соответственно от УР и ВЦ до защищаемого объекта в момент изменения скорости УР, DПОДР - наименьшее расстояние (заданное) до объекта, на котором должен быть произведен подрыв БЧ УР.
В способе по п.3 и п.4 формулы изобретения сближение УР с ВЦ обеспечивают путем установления на конечном участке скорости движения УР большей, чем скорость движения ВЦ (поскольку УР находится дальше от защищаемого объекта, отставая от ВЦ), в частности скорость УР на конечном участке траектории ВЦ, переместившейся в направлении на защищаемый объект, выбирают из условия:
где DУр и DВЦ - расстояния соответственно от УР и ВЦ до защищаемого объекта в момент изменения скорости УР, DПОДР - наименьшее расстояние (заданное) до объекта, на котором должен быть произведен подрыв БЧ УР.
За счет изменения VУР может быть достигнуто соотношение VУР≈VВЦ, при котором время радиоконтакта наибольшее (tК=(DК-DПОДР)/VВЦ, где DK - дальность до защищаемого объекта от зоны, в которой произошел радиоконтакт). Это позволяет к моменту времени, когда расстояния от УР и от ВЦ до защищаемого объекта равны между собой (DУР=DПОДР), обеспечить сколь угодно большую степень сближения УР с ВЦ путем выбора соотношений величин, входящих в (1), (2). Благодаря этому ошибки наведения УР на ВЦ обеспечиваются минимальными, а время радиоконтакта взрывателя БЧ УР с ВЦ увеличивается, т.е. достигается максимальная эффективность использования заряда БЧ УР.
Таким образом, заявляемый способ наведения обеспечивает наименьшие динамические ошибки наведения УР на ВЦ и увеличение времени радиоконтакта взрывателя боевой части УР с ВЦ.
Наиболее эффективно заявленные изобретения могут быть использованы для уничтожения ПРР при защите от них РЛС.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - иллюстрация известного способа;
Фиг.2 - блок-схема реализации известного способа;
Фиг.3 - иллюстрация заявляемого способа по п.1 формулы изобретения;
Фиг.4 - иллюстрация заявляемого способа по п.3 формулы изобретения;
Фиг.5 - блок-схема заявляемого радиолокационного комплекса;
Фиг.6 - блок-схема радиоприемного устройство канала наведения УР.
Радиолокационный комплекс, реализующий предлагаемый способ (фиг.5), содержит пункт управления УР 1 и бортовую аппаратуру УР 2, причем пункт управления УР 1 включает в себя последовательно соединенные РЛС обнаружения 3, РЛС наведения 4, счетно-решающее устройство 5, следящий силовой привод 6, а также последовательно соединенные передающее устройство 7 и антенное устройство 8, механически соединенное со следящим силовым приводом 6, бортовая аппаратура УР 2 содержит антенну УР 9, радиоприемное устройство канала наведения УР 10, исполнительное устройство 11, антенный переключатель 12, передающее устройство 13, радиоприемное устройство канала обнаружения 14, вычислитель 15, при этом антенна УР 9 соединена со входом/выходом антенного переключателя 12, вход которого соединен с выходом передающего устройства 13, а выход - со входом радиоприемного устройства канала наведения УР 10, два выхода которого соединены соответственно с первым и вторым входами исполнительного устройства 11 для подачи управляющих сигналов корректировки курса УР по углу места и азимуту, а третий выход - с управляющим входом передающего устройства 13, выход антенного переключателя 12 соединен также со входом радиоприемного устройства канала обнаружения УР 14, выход которого соединен со входом вычислителя 15, два выхода которого соединены с первым и вторым входами исполнительного устройства 11, третий выход вычислителя 15 соединен с третьим входом исполнительного устройства 11 для подачи управляющего сигнала коррекции скорости УР.
Заявляемое устройство может быть выполнено с использованием следующих известных элементов:
РЛС обнаружения 3 - описана в источнике: Теоретические основы радиолокации. Под ред. Ширмана Я.Д., М., “Сов. радио”, 1970, стр.221.
Антенна УР 9 - фазированная антенная решетка с электронным сканированием лучом и с круговым механическим вращением (Справочник по радиолокации. Под ред. М. Сколника, т.2. - М.: “Сов. радио”, 1977, с.132-138).
Антенный переключатель 12 - выполнен на циркуляторе (Справочник по основам радиолокационной техники. - М., 1967, с.146-147).
Радиоприемное устройство канала наведения УР 10 (фиг.6) содержит приемник 16, соединенные с его выходом два дешифратора команд управления курсом УР 17 и дешифратор команд включения самонаведения УР 18, а также последовательно включенные с дешифраторами демодуляторы команд 19 (Типугин В.Н., Вейцель В.А. Радиоуправление, “Сов. радио”, 1962 г., с.430-431).
Исполнительное устройство 11 - система устройств - силовых приводов, преобразующих управляющие сигналы в управляющие силы, изменяющие параметры движения УР (Конструирование управляемых снарядов. Под ред. А.Е.Пакета и С. Рамо, Военное изд-во МО СССР, М., 1963, с.61-74; Справочник офицера противовоздушной обороны, М., Военное изд-во, 1987, стр.175, абз. 5).
Передающее устройство 13 - импульсного типа (Справочник по основам радиолокационной техники. - М., 1967, с.278).
Радиоприемное устройство канала обнаружения УР 14 - супергетеродинного типа (Справочник по основам радиолокационной техники. - М., 1967, с.343-344).
Счетно-решающее устройство 5 и вычислитель 15 - цифровые устройства, реализующие алгоритм оценки параметров сопровождаемой траектории, описанный, например в источнике: Кузьмин С.З. Цифровая обработка радиолокационной информации. Москва, “Сов. радио”, 1967, стр.369. Оцениваемыми параметрами являются угол места, азимут и скорость ВЦ в координатах УР (т.е. относительно УР) в момент времени ti. Каждый из этих параметров может быть вычислен в соответствии с выражением (Кузьмин С.З. Цифровая обработка радиолокационной информации. Москва, “Сов. радио”, 1967, стр.300, формула (4.51)):
 ,
,
где  ,
,  ,
,
Т0 - период обращения к ВЦ при ее сопровождении;
i - номер измерения,
n - количество измерений.
Для оценки параметров траектории ВЦ, переместившейся в направлении на защищаемый объект, вместо ti подставляется tn=(n-1)T0, для оценки параметров прогнозируемой на р периодов обзора траектории необходимо вместо ti подставить tn+p=(n+р-1)T0 (там же, стр.301-302).
Заявляемый комплекс (фиг.5) работает следующим образом. Радиолокационная станция обнаружения 3 осуществляет обзор заданной зоны пространства путем излучения зондирующих и приема отраженных сигналов. При обнаружении ВЦ ее координаты передаются в РЛС наведения 4 пункта управления УР 2. С помощью счетно-решающего устройства 5 вычисляются параметры траектории ВЦ и определяются координаты области на траектории ВЦ, в которую необходимо вывести У Р. С помощью следящего силового привода 6 антенное устройство 8 пункта управления УР 2 разворачивается в направлении на данную область. При этом равносигнальная зона диаграммы направленности радиолуча, сформированная с помощью антенного устройства 8, оказывается направленной в данную область пространства. Производится пуск УР. УР движется в равносигнальной зоне радиолуча антенного устройства 8. В процессе управления курсом УР передающее устройство 7, работающее постоянно, формирует сигналы, которые излучаются затем антенным устройством 8. Сигналы принимаются антенной УР 9 и через антенный переключатель 12 поступают в радиоприемное устройство канала наведения УР 10, где они с помощью двух дешифраторов команд управления курсом УР 17 и двух демодуляторов команд 19 преобразуются в управляющие сигналы, пропорциональные отклонениям направления движения УР от направления равносигнальной зоны радиолуча антенного устройства 8 по углу места и азимуту. Управляющие сигналы затем подаются на входы исполнительного устройства 11, с помощью которого производится изменение положений аэродинамических рулей УР.
В РЛС обнаружения 3 обнаружение ВЦ осуществляется периодически - с темпом обновления данных РЛС. С этим же темпом в счетно-решающем устройстве 5 производится уточнение координат УР и корректируется положение луча антенного устройства 8, за которым следует корректировка курса УР. По достижении УР траектории ВЦ по команде с РЛС наведения 4 осуществляется переход УР в режим самонаведения. Для этого с РЛС наведения излучается соответствующим образом закодированный сигнал, который принимается антенной УР 9, через антенный переключатель 12 поступает в радиоприемное устройство канала наведения 10, где с помощью дешифратора команд включения самонаведения УР 18 и демодулятора команд 19 преобразуется в управляющий сигнал, запускающий передающее устройство 13. С этого момента УР переходит в режим самонаведения на ВЦ. Сигналы передающего устройства 13 посредством антенного переключателя 12 и антенны УР 9 излучаются в сторону ВЦ. Отраженные от ВЦ сигналы принимаются антенной УР 9 и через антенный переключатель 12 подаются на вход радиоприемного устройства канала обнаружения 14, где из них извлекается информация о координатах ВЦ, которая затем поступает в вычислитель 15. В вычислителе 15 по алгоритмам, аналогичным алгоритмам счетно-решающего устройства 5, производится оценка параметров траектории ВЦ и формируются два управляющих сигнала, которые подаются в исполнительное устройство 11 для корректировки курса УР по углу места и азимуту, обеспечивающей нахождение УР на траектории ВЦ. В вычислителе 15 на основе данных о траектории ВЦ (VВЦ) определяется также скорость УР относительно ВЦ, вычисляется (по формуле (1) или (2)) величина скорости УР (VУР), требуемая для обеспечения встречи с ВЦ на расстоянии от защищаемого объекта не менее заданного (DПОДР), и формируется соответствующий управляющий сигнал, который затем с третьего выхода вычислителя 15 подается на третий вход исполнительного устройства 11. С помощью данного управляющего сигнала исполнительное устройство 11 изменяет режим работы двигательной установки УР и этим корректирует скорость УР. Таким образом, УР осуществляет самонаведение на ВЦ и сближение с ней до расстояния срабатывания устройства подрыва БЧ УР при минимальных динамических ошибках наведения и увеличенном времени радиоконтакта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ И РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2256191C1 |
| КОМПЛЕКС ПРОТИВОВОЗДУШНОЙ РАКЕТНО-КОСМИЧЕСКОЙ ОБОРОНЫ | 2002 |
|
RU2227892C1 |
| Способ поражения воздушной цели управляемой ракетой | 2019 |
|
RU2707637C1 |
| ОСКОЛОЧНО-ФУГАСНАЯ БОЕВАЯ ЧАСТЬ НАПРАВЛЕННО-КРУГОВОГО ДЕЙСТВИЯ | 2006 |
|
RU2301958C1 |
| ПРОТИВОВОЗДУШНЫЙ АВТОНОМНЫЙ УНИВЕРСАЛЬНЫЙ КОМПЛЕКС САМООБОРОНЫ ПОДВОДНЫХ ЛОДОК ("ПАУК" СО ПЛ) И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2008 |
|
RU2382313C2 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 2006 |
|
RU2307374C1 |
| ОСКОЛОЧНО-ФУГАСНАЯ БОЕВАЯ ЧАСТЬ | 2006 |
|
RU2301957C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 2003 |
|
RU2261457C2 |
| ПРОТИВОВОЗДУШНЫЙ (ПРОТИВОКОРАБЕЛЬНЫЙ) АВТОНОМНЫЙ УНИВЕРСАЛЬНЫЙ КОМПЛЕКС ПОЗИЦИОННЫЙ ПОДВОДНЫЙ УПРАВЛЯЕМЫЙ ("ПАУК" ППУ) И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2009 |
|
RU2413156C1 |
| СПОСОБ И УСТРОЙСТВО ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2581704C1 |
Изобретения относятся к способам радиолокационного наведения управляемых ракет (УР) на воздушные цели (ВЦ) и могут применяться в радиолокационных системах наведения. Технический результат - уменьшение динамических ошибок наведения УР на ВЦ и увеличение времени радиоконтакта взрывателя боевой части УР с ВЦ. Технический результат достигается тем, что наведение УР на ВЦ, движущуюся в направлении на защищаемый объект, включающее обнаружение ВЦ, оценку параметров ее траектории, пуск УР, сближение УР с ВЦ на расстояние срабатывания устройства подрыва боевой части УР, корректировку курса УР в процессе сближения, подрыв заряда боевой части УР на расстоянии от защищаемого объекта не менее заданного, осуществляют по траектории, совпадающей на конечном участке с прогнозируемой траекторией движения ВЦ. При этом на конечном участке скорость движения УР устанавливают меньшей, чем скорость ВЦ. Технический результат достигается также тем, что наведение УР на ВЦ, движущуюся в направлении на защищаемый объект, включающее обнаружение ВЦ, оценку параметров ее траектории, пуск УР, сближение УР с ВЦ на расстояние срабатывания устройства подрыва боевой части УР, корректировку курса УР в процессе сближения, подрыв заряда боевой части УР на расстоянии от защищаемого объекта не менее заданного, осуществляют по траектории, совпадающей на конечном участке с траекторией движения ВЦ, переместившейся в направлении на защищаемый объект. При этом на конечном участке скорость движения УР устанавливают большей, чем скорость ВЦ. Технический результат достигается также тем, что радиолокационный комплекс для наведения управляемой ракеты на воздушную цель содержит пункт управления УР и бортовую аппаратуру У Р. Причем пункт управления УР включает в себя РЛС обнаружения, РЛС наведения, счетно-решающее устройство, следящий силовой привод, передающее устройство и антенное устройство, бортовая аппаратура УР содержит антенну УР, радиоприемное устройство канала наведения УР, исполнительное устройство, антенный переключатель, передающее устройство, радиоприемное устройство канала обнаружения, вычислитель. 3 с. и 2 з.п. ф-лы, 6 ил.
где DУР и DВЦ - расстояния соответственно от УР и ВЦ до защищаемого объекта на конечном участке прогнозируемой траектории в момент изменения скорости УР.

где DУР и DВЦ - расстояния соответственно от УР и ВЦ до защищаемого объекта на конечном участке траектории ВЦ, переместившейся в направлении на защищаемый объект, в момент изменения скорости УР.
| Справочник офицера противовоздушной обороны | |||
| Под ред | |||
| Зимина Г.В | |||
| - М.: Военное издательство, 1987, с.205, 206 | |||
| ТИПУГИН В.Н | |||
| Радиоуправление | |||
| - М.: Советское радио, 1962, с.135 | |||
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ САМОХОДНОГО ЗЕНИТНОГО КОМПЛЕКСА | 1995 |
|
RU2102686C1 |
| US 5197691 A, 30.03.1993 | |||
| DE 3034838 С1, 29.11.1990. | |||

