Изобретение относится к области космической техники и может применяться для тренажерной подготовки экипажей пилотируемых космических аппаратов (ПКА), а также авиационных и морских комплексов. Учитывая всю сложность космического полета экипажа по программе МКС и соответственно программы подготовки экипажей по данной программе, необходимо процесс обучения космонавтов вести на тренажерах с высокими техническими характеристиками, функциональными возможностями и высокой степени соответствия реальному полету.
Наиболее близким к изобретению являются «Динамический тренажер», описанный как изобретение - патент №2254617 от 21.06.2005 г., авторы: Гаврик И.Н., Еремин А.Ф., Суворов А.П. и «Обучающее устройство», описанное как полезная модель - патент №33451 от 20.10.2003 г., авторы: Суворов А.П., Терехов В.В. и др. Изобретение-патент №2254617 позволяет воспроизводить в земных условиях физическое воздействие на космонавта перегрузки при управлении космическим кораблем на участке спуска;
комплексное обучающее устройство - патент №33451 позволяет проводить комплексное обучение космонавтов: поэтапное, включая этапы первоначального обучения, предтренажерного и заключительного этапа, когда воспроизводятся условия полного, так называемого сквозного, космического полета, начиная с выведения, с физическим воздействием перегрузки на космонавта; полета по орбите с выполнением управляемых режимов ориентации, сближения, причаливания, стыковки и расстыковки в условиях физического воздействия невесомости, и спуск с орбиты с физическим воздействием перегрузки. Однако в этих тренажных устройствах не обеспечивается гарантированное качество подготовки космонавтов по обеспечению безопасности и надежности пилотируемого космического полета по программе МКС с учетом многообразия и большого количества нештатных ситуаций (НшС), так и их взаимных связей. В то время, как качество подготовленности космонавтов к деятельности по предотвращению развития нештатных ситуаций космического полета, по сути, является одной из составляющих программы обеспечения безопасности и надежности пилотируемых космических комплексов.
Целью предлагаемого изобретения является обеспечение безопасности и надежности пилотируемых космических полетов за счет целенаправленного формирования требуемых состояний подготовленности космонавтов в результате целенаправленного и дозированного (адаптированного) выбора НшС на тренировках экипажей.
Поставленная цель достигается тем, что к наиболее близким к изобретению динамическому тренажеру и обучающему устройству, содержащим пульт космонавта, модель системы управления бортовым комплексом, модель датчиков, модель движения космического корабля, ручку управления спуском (РУС), модель системы управления движением, модель системы исполнительных органов, пульт контроля и управления тренировкой, генератор изображения Земли и станции МКС, имитатор визира специального космонавта (ВСК), ручку управления ориентацией (РУО), ручку управления движением (РУД), пульт управления центрифугой, систему управления центрифугой, кабину «А» центрифуги, дополнительно вводятся вычислитель текущей компетентности космонавтов, адаптивно-оптимальный формирователь, банк НшС.
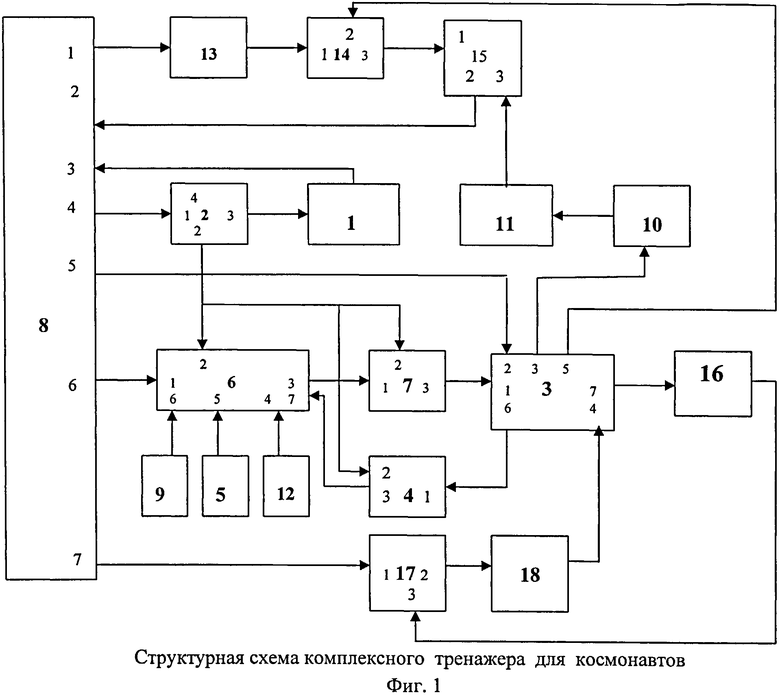
На фиг.1 представлена структурная схема изобретения. На фиг.1 обозначены:
1 - пульт космонавта;
2 - модель системы управления бортовым комплексом;
3 - модель движения космического корабля;
4 - модель датчиков;
5 - ручка управления спуском (РУС);
6 - модель системы управления движением;
7 - модель исполнительных органов;
8 - пульт контроля и управления тренировкой.
9 - ручка управления ориентацией (РУО);
10 - генератор изображения Земли и станции МКС;
11 - имитатор визира специального космонавта (ВСК);
12 - ручка управления движением (РУД);
13 - пульт управления центрифугой;
14 - система управления центрифугой;
15 - кабина «А» центрифуги;
16 - вычислитель текущей компетентности космонавтов;
17 - адаптивно-оптимальный формирователь;
18 - банк НшС.
Изобретение содержит пульт космонавта 1, выход которого соединен с третьим входом пульта контроля и управления тренировкой 8, пятый выход которого соединен со вторым входом модели движения космического корабля 3, шестой выход которой соединен с первым входом модели датчиков 4, третий выход которой соединен с седьмым входом модели системы управления движением 6, первый вход которой соединен с шестым выходом пульта контроля и управления 8, четвертый выход которого соединен с первым входом модели системы управления бортовым комплексом 2, третий выход которой соединен с входом пульта космонавта 1, а второй выход модели системы управления бортовым комплексом 2 параллельно соединен со вторым входом модели датчиков 4, со вторым входом модели исполнительных органов 7 и со вторым входом модели системы управления движением 6, третий выход которой соединен с первым входом модели исполнительных органов 7, третий выход которой соединен с первым входом модели движения космического корабля 3, третий выход которой соединен с входом генератора изображения Земли и станции МКС 10, выход которого соединен с входом имитатора визира специального космонавта (ВСК) 11, выход которого соединен с третьим входом кабины «А» центрифуги15, второй выход которой соединен со вторым входом пульта контроля и управления тренировкой 8, первый выход которого соединен с входом пульта управления центрифугой 13, выход которого соединен с первым входом системы управления центрифуги 14, третий выход которой соединен с первым входом кабины «А» центрифуги 15, а второй вход системы управления центрифугой 14 соединен с пятым выходом модели движения космического корабля 3, четвертый вход которой соединен с выходом банка НшС 18, а седьмой выход модели движения 3 соединен с входом вычислителем текущей компетентности космонавта 16, выход которого соединен с третьим входом адаптивно-оптимального формирователя 17, первый вход которого соединен с седьмым выходом пульта контроля и управления тренировкой 8, а второй выход адаптивно-оптимального формирователя 17 соединен с входом банка НшС 18, а ручка управления ориентацией (РУО) 9 соединена с шестым входом модели системы управления движением 6, пятый вход которой соединен с ручкой управления спуском (РУС) 5, а ручка управления движением (РУД) 12 соединена с четвертым входом модели системы управления движением 6.
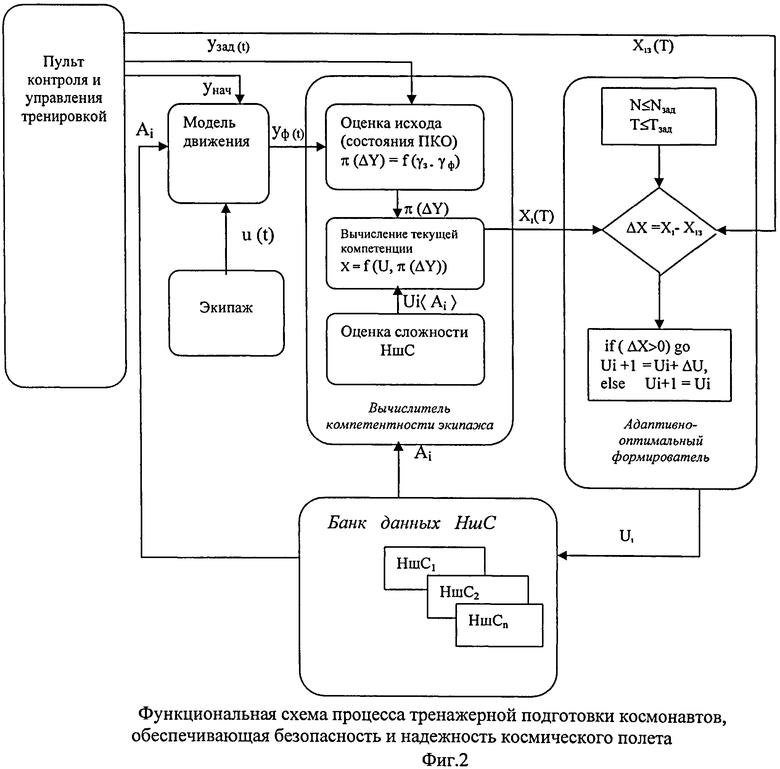
Вычислитель текущей компетентности (16) на каждом цикле тренировки обеспечивает адаптивно-оптимальный формирователь информацией о текущем состоянии компетентности экипажа пилотируемых космических объектов (ПКО). Аналитическое описание деятельности экипажа ПКО представляется как динамическая система с внутренними пространствами состояний «вход-состояние компетентности-выход»:

где Т - упорядоченное множество моментов времени; U - множество значений входных величин; Ωc - пространство функции и (t), описывающих допустимые входные воздействия; Y - множество значений выходных величин, характеризующих результаты деятельности экипажа; Г - пространство функций y(t), описывающих изменение по времени выходных величин; X -множество переменных величин, характеризующих состояние компетентности экипажа; ψ:U→X - переходная функция, характеризующая зависимость элементов множества состояний Х от входных величин U и прежнего состояния; φ:U×Х→Y - выходная функция, характеризующая зависимость элементов множества состояний выходов Y от входной величины и состояния компетентности экипажа.
Вычислитель текущей компетентности рассчитывает сложность НшС, предъявляемых экипажу на очередной тренировке, и оценивает исход деятельности экипажа относительно ожидаемого (функцию потерь).
Состояние компетентности экипажа ПКО применительно к обеспечению безопасности и надежности космического полета представляет собой случайный вектор X(f)=<X1, Х2, Х3, X4,t>, в котором переменные Х1 - X4, представляют отдельные компетенции. При этом каждая компетенция является двумерной случайной величиной Х1=F(U,π(ΔYt),Т), поскольку является функцией элементарного события - реализации НшС At, имеющей сложность U и исход π(ΔYt). Качество компетенции экипажа интерпретируется как статистическая вероятность (относительная частота) благоприятного исхода операторской функции при парировании НшС.
Адаптивно-оптимальный формирователь (17) обеспечивает управление качеством подготовки космонавтов за счет адаптивности выборки НшС, предъявляемых космонавтам на тренировках, в зависимости от их текущего состояния компетентности и выбранной стратегии подготовки. При этом обеспечиваются условия действия статистического ансамбля событий (повторяемость условий испытаний, статистическая устойчивость и достаточное количество испытаний), необходимых для объективной оценки статистических вероятностей качества операторских компетенции космонавтов.
Управление качеством подготовки космонавтов заключается в оптимизации статистических оценок операторских компетенций космонавта (экипажа ПКО) в результате его тренировок на тренажерах, которое заключается в минимизации функции потерь π(ΔYt) от его ошибочных действий при максимально возможной сложности деятельности космонавта в НшС:
Xopt=arg Ut∈Uдоп,t=1,T max F(Ut, π(ΔYt)), T≤Тзад,N≤Nзад,
π(ΔYt)<πзад
где: π(ΔYt) - обобщенная функция потерь системы «ЦУП- экипаж-ПКО», обусловленных ошибочными действиями экипажа в НшС At, которая характеризует качество деятельности экипажа (обобщенный параметр оптимизации);
Х= F(Ut, π(ΔYt))=РX (U<Uзад, π(ΔYt)<πзад (ΔYt)) - статический закон распределения вектора Х=<x1,……,Xk> оценок Xk операторских функций космонавта (экипажа ПКО), которые представляют собой вероятность реализации данных операторских функций при парировании космонавтом НшС с заданными уровнями сложности Uзад и функции потерь, πзад(ΔYt); T≤Тзад,N≤Nзад, - заданные ограничения на время реализации программы подготовки и количество тренировок, соответственно. Оценивание качества деятельности экипажа осуществляется через вычисление случайного вектора ΔYt=Yt-Yоt исхода НшС At, определяемый по разности фактического состояния Yt, в которое перешла система «ЦУП-экипаж-ПКО» в результате парирования НшС экипажем, и ее ожидаемым состоянием Yot (в случае безошибочных действий экипажа).
Банк НшС (18) является хранилищем НшС, упорядоченных по сложности нештатных ситуаций и обеспечивает выбор экземпляров НшС по заданному правилу. Все НшС разложены по «корзинам» таким образом, что в каждой корзине находятся НшС одного класса подобия действия экипажа. В одной корзине находятся НшС разной сложности и ожидаемых исходов, но обладающие одним общим свойством - способом, посредством которого реализуется одна из операторских компетенции экипажа. Корзины являются пересекающимися множествами, т.е. одна и та же НшС может находиться в различных корзинах, поскольку характеризуется различными способами обнаружения, идентификации, планирования и выхода. В ходе тренировок экипажа на тренажерах необходимо последовательно «обойти» все корзины, выбирая из них НшС с возрастающей сложности по алгоритму, выработанному в адаптивно-оптимальном формирователе.
Предлагаемое устройство в настоящее время реализовано на динамическом тренажере управляемого спуска на базе центрифуги ЦФ-18, который используется для подготовки космонавтов и астронавтов по программе Международной космической станции. На фиг.2 приведена функциональная схема организации тренировочного процесса подготовки космонавтов на динамическом тренажере управляемого спуска на базе центрифуги ЦФ-18, обеспечивающего безопасность и надежность космического полета с вновь введенными дополнительными блоками тренажера за счет адаптивного формирования сложности тренировочных заданий НшС на тренировках с учетом текущих состояний компетенций космонавтов.
Предлагаемое изобретение также может быть реализовано на других авиационно-космических тренажерах и обучающих системах.
Источники информации
1. Патент РФ №2254617 7МКИ: G09B 9/16 2005 г. Динамический тренажер. БИПМ №17. 2005 г.
2. Патент РФ №33451 7МКИ: G09B 9/16 2003 г. Обучающее устройство. БИПМ №29. 2003 г.
3. Сохин И.Г. Адаптивно-компетентностный подход к решению проблемы управления качеством подготовки космонавтов в интересах гарантированного обеспечения заданного уровня безопасности и надежности космических полетов. «Пилотируемые полеты в космос», №3, 2012, с.36-48. Звездный городок.
4. Тренажерные комплексы и тренажеры. Технологии разработки и опыт эксплуатации. Под редакцией В.Е. Шукшинова, М., Машиностроение, 2005 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ КОСМОНАВТОВ | 2015 |
|
RU2578644C1 |
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР | 2006 |
|
RU2326447C1 |
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР | 2003 |
|
RU2254617C2 |
| ТРЕНАЖЕР ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2008 |
|
RU2367027C1 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ОРБИТАЛЬНОГО УЗЛОВОГО МОДУЛЯ РОССИЙСКОГО СЕГМЕНТА МЕЖДУНАРОДНОЙ КОСМИЧЕСКОЙ СТАНЦИИ | 2012 |
|
RU2506647C1 |
| ТРЕНАЖЕР ДЛЯ ОТРАБОТКИ КОМПЛЕКСА ЗАДАЧ ПО ИССЛЕДОВАНИЮ АСТРОНОМИЧЕСКОГО ОБЪЕКТА УЧАСТНИКАМИ КОСМИЧЕСКОЙ ЭКСПЕДИЦИИ | 2015 |
|
RU2581643C1 |
| СПОСОБ КОНТРОЛЯ ГОТОВНОСТИ ЭКИПАЖА КОСМИЧЕСКОГО АППАРАТА К НЕШТАТНЫМ СИТУАЦИЯМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2605230C1 |
| СИМУЛЯТОР ПОЛЕТА КОСМИЧЕСКОГО КОРАБЛЯ | 2017 |
|
RU2653448C1 |
| ТРЕНАЖЕР ВНЕКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ КОСМОНАВТОВ | 2012 |
|
RU2506648C1 |
| КОСМОЦЕНТР | 2012 |
|
RU2505864C2 |
Изобретение относится к области космической техники и может применяться для тренажерной подготовки экипажей пилотируемых космических аппаратов, а также авиационных и морских комплексов. Комплексный тренажер для космонавтов содержит модель системы управления бортовым комплексом, модель датчиков, ручку управления спуском, модель системы управления движением, модель системы исполнительных органов, пульт контроля и управления тренировкой, генератор изображения Земли и станции МКС, имитатор визира специального космонавта, ручку управления ориентацией, ручку управления движением, пульт управления центрифугой, систему управления центрифугой, кабину «А» центрифуги, модель движения космического корабля, пульт космонавта, вычислитель текущей компетентности космонавтов, адаптивно-оптимальный формирователь и банк НшС. Вычислитель текущей компетентности космонавтов на каждом цикле тренировки обеспечивает информацией о текущем состоянии компетентности экипажа пилотируемых космических объектов. Адаптивно-оптимальный формирователь обеспечивает управление качеством подготовки космонавтов за счет адаптивности выборки НшС, предъявляемых космонавтам на тренировках, в зависимости от их текущего состояния компетентности и выбранной стратегии управления подготовкой. Банк НшС является хранилищем нештатных ситуаций, упорядоченных по сложности для выбора экземпляров НшС по заданному правилу. Достигается обеспечение безопасности и надежности пилотируемых космических полетов за счет целенаправленного формирования требуемых состояний подготовленности космонавтов в результате целенаправленного и дозированного (адаптированного) выбора НшС для тренировок экипажей. 2 ил.
Комплексный тренажер для космонавтов, содержащий модель системы управления бортовым комплексом, модель датчиков, ручку управления спуском (РУС), модель системы управления движением, модель системы исполнительных органов, пульт контроля и управления тренировкой, генератор изображения Земли и станции МКС, имитатор визира специального космонавта (ВСК), ручку управления ориентацией (РУО), ручку управления движением (РУД), пульт управления центрифугой, систему управления центрифугой, кабину «А» центрифуги, модель движения космического корабля, пульт космонавта, выход которого соединен с третьим входом пульта контроля и управления тренировкой, пятый выход которого соединен со вторым входом модели движения космического корабля, шестой выход которой соединен с первым входом модели датчиков, третий выход которой соединен с седьмым входом модели системы управления движением, первый вход которой соединен с шестым выходом пульта контроля и управления, четвертый выход которого соединен с первым входом модели системы управления бортовым комплексом, третий выход которой соединен с входом пульта космонавта, а второй выход модели системы управления бортовым комплексом параллельно соединен со вторым входом модели датчиков, со вторым входом модели исполнительных органов и со вторым входом модели системы управления движением, третий выход которой соединен с первым входом модели исполнительных органов, третий выход которой соединен с первым входом модели движения космического корабля, третий выход которой соединен с входом генератора изображения Земли и станции МКС, выход которого соединен с входом имитатора визира специального космонавта (ВСК), выход которого соединен с третьим входом кабины «А» центрифуги, второй выход кабины «А» центрифуги соединен со вторым входом пульта контроля и управления тренировкой, первый выход которого соединен с входом пульта управления центрифугой, выход которого соединен с первым входом системы управления центрифугой, третий выход которой соединен с первым входом кабины «А» центрифуги, а второй вход системы управления центрифугой соединен с пятым выходом модели движения космического корабля, а ручка управления ориентацией (РУО) соединена с шестым входом модели системы управления движением, пятый вход которой соединен с ручкой управления спуском (РУС), ручка управления движением (РУД) соединена с четвертым входом модели системы управления движением, отличающийся тем, что дополнительно введены вычислитель текущей компетентности космонавтов, адаптивно-оптимальный формирователь, банк НшС, выход которого соединен с четвертым входом модели движения, седьмой выход которой соединен с входом вычислителя текущей компетентности космонавтов, выход которого соединен с третьим входом адаптивно-оптимального формирователя, второй выход которого соединен с входом банка НшС, а первый вход адаптивно-оптимального формирователя соединен с седьмым выходом пульта контроля и управления тренировкой.
| Рентгеновский томофлюорограф | 1948 |
|
SU81361A1 |
| Способ жидкостной обработки кож и аппарат для его осуществления | 1954 |
|
SU102823A2 |
| US 5435725 A, 25.07.1995 | |||
| Способ сушки материалов | 1931 |
|
SU33451A1 |

