Изобретение относится к способу бесконтактного измерения поперечного профиля или расстояния между рельсами, в частности в зоне стрелочного перевода, а также к устройству для реализации способа.
Из патента AT 402953 уже известно определение ширины колеи рельсового пути при помощи двух - по одному для каждого рельса - датчиков для измерения расстояния, которые расположены на оси колеса железнодорожного транспортного средства в области между рельсами.
Согласно патенту AT 321346 известен, кроме того, способ точечного освещения головок рельса пути со стороны, причем отражение лучей света регистрируют при помощи устройства на фотодиодах, находящегося в вертикальном направлении над рельсом.
В патенте US 3864039 описан способ, когда освещают только подошву каждого рельса. Приемник светового излучения, расположенный над рельсам, регистрирует тень головки рельса, после чего эти сигналы преобразуются в данные о положении, показывающие ширину колеи.
Задачей предложенного изобретения является, таким образом, создание способа указанного типа, с помощью которого возможно более быстрое и более точное определение и оценка измерительных величин, важных для состояния стрелочного перевода.
Согласно изобретению эта задача решается при помощи способа, в котором имеются отличительные признаки, приведенные в п.1 формулы. С помощью такого способа теперь появилась возможность значительно более быстрого и более точного проведения измерений различных параметров стрелочного перевода для точного контроля, в частности, за критическими зонами стрелки. При этом можно достоверно документировать (а при необходимости и отпечатывать) данные о преобладающих действительных условиях и состоянии рельсов и элементов стрелочного перевода. Благодаря этому можно также особенно выгодным образам точно узнать степень истирания или износа рельса, стрелочного остряка, контррельса и т.д., так что на недостатки, касающиеся этого, можно реагировать немедленно и целенаправленно, прежде чем возникнет опасная ситуация или будет нанесен ущерб безопасности. Измерения можно проводить, кроме прочего, чрезвычайно плотно - в отношении направления продвижения вперед машины, реализующей способ, так что можно достигнуть полной проверки состояния стрелочного перевода. Кроме того, измерение можно начать как с начала стрелочного перевода, так и с его конца, то есть с двух сторон.
Изобретение относится также к устройству для бесконтактного измерения поперечного профиля или расстояния между рельсами пути, в частности, в зоне стрелочного перевода согласно п.3 формулы. Благодаря ему появилась возможность достоверной, точной и прежде всего полной регистрации данных и параметров стрелочного перевода, наиболее важных для безопасности эксплуатации железнодорожного пути.
Прочие выгоды и формы выполнения изобретения даны в зависимых пунктах формулы и представлены на чертежах.
Изобретение описывается ниже более подробно при помаши примеров выполнения, представленных на чертежах.
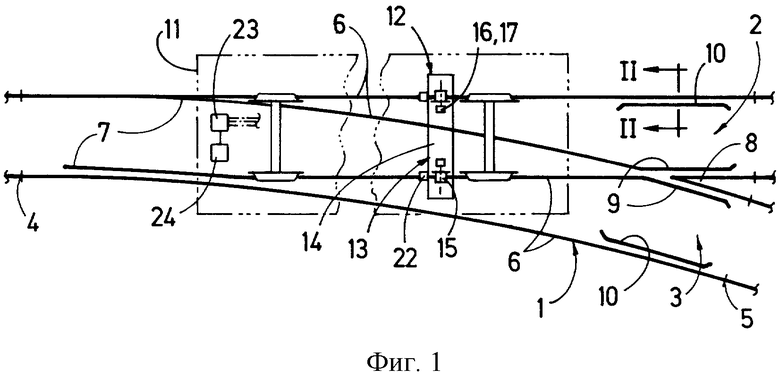
Фиг.1 - схематичный вид сверху на стрелочный перевод с устройством для реализации заявленного способа, размещенным на железнодорожном транспортном средстве;
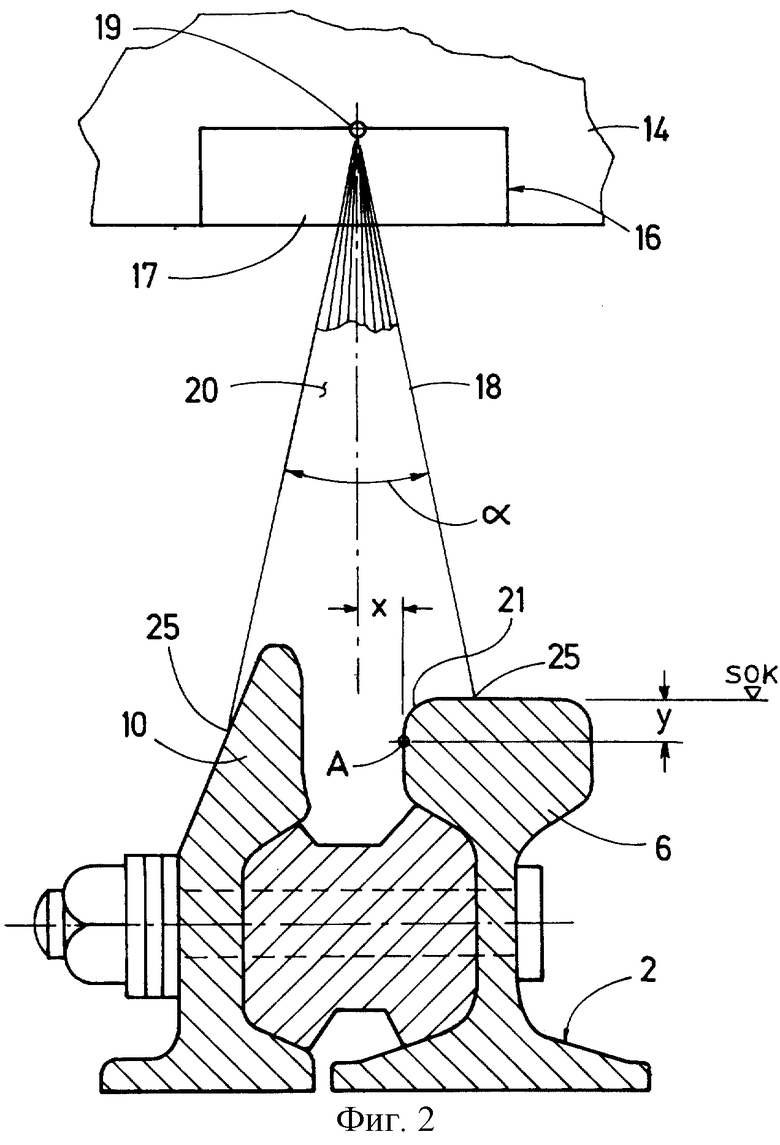
Фиг.2 - поперечный вид в области контррельса стрелочного перевода согласно стрелке II фиг.1;
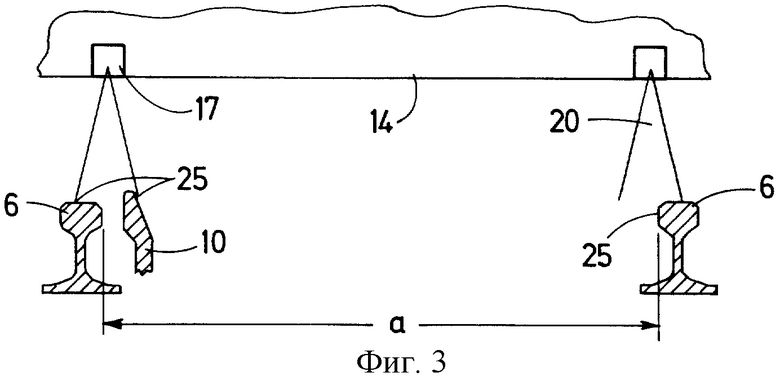
Фиг.3-6 - изображение соответственных регистрируемых измерительных значений.
На фиг.1 в качестве главного примера показан типичный простой стрелочный перевод 1 с главным путем 2 и переводной кривой 3, которые проходят между началом стрелочного перевода 4 и концам стрелочного перевода 5. Стрелочный перевод 1 состоит по существу из рельсов 6, остряков 7, крестовины 8, усовиков 9 и контррельсов 10. На главном пути 2 можно видеть (условно обозначено) железнодорожное транспортное средство 11, на котором расположено устройство 12 для измерения расстояния между рельсами 6 или поперечного профиля на разных участках стрелочного перевода. Под поперечным профилем следует понимать профили рельса, получающиеся из поперечного сечения, проходящего перпендикулярно продольному направлению рельса.
Измерительное устройство 12 размещено на измерительном вагоне 13 с рамой 14, который катится по рельсам 6 при помощи роликов с гребнем 15 с цилиндрическими поверхностями катания. Измерительный вагон 13 прижимается известным образом на стрелочном переводе 1 к сплошной рельсовой нитке; на предложенном чертеже - это наружный или верхний рельс 6 главного пути 2. В области над каждым из рельсов 6, по которому катится измерительный вагон 13, на раме 14 расположен датчик измерения расстояния 16, выполненный в виде бесконтактного лазерного сканера 17, направленного вниз на соответствующий рельс 6.
На фиг.2 еще лучше можно видеть, что лазерный сканер 17 испускает луч считывания 18, который совершает возвратно-поступательное движение вокруг оси вращения 19, проходящей в продольном направлении главного пути 2 или параллельно сканируемому рельсу 6, с углом сканирования α. Благодаря этому получается плоскость считывания 20, проходящая перпендикулярно продольному направлению пути. Лазерный сканер 17 установлен при этом не прямо над рельсом 6, а немного смещен в направлении внутренней стороны пути. Предпочтительная величина х этого смещения составляет 22 мм от базовой точки отсчета А, которая находится на расстоянии у (предпочтительно 14 мм) ниже поверхности катания рельса (SОK) на рабочей грани головки 21 рельса 6. Отсюда получается (исходя из стандартной для железнодорожного пути ширины колеи 1435 мм), что расстояние между обоими лазерными сканерами 17 в поперечном направлении пути составляет 1391 мм.
Удаленность лазерного сканера 17 от поверхности катания рельса (SOK) по вертикали составляет предпочтительно 200 мм. Сочетание установки лазерного сканера 17 со смещением по горизонтали и величины угла сканирования α дает такое расположение, при котором плоскость считывания 20 оптимально регистрирует все те области рельса 6 и контррельса 10, которые подвержены износу и истиранию. Это относится, конечно, и к участкам стрелочного перевода, на которых вместо контррельса есть крестовина, усовики или остряки.
Во время работ по бесконтактному измерению стрелочного перевода 1 железнодорожное транспортное средство 11 непрерывно движется через стрелочный перевод, причем измерительный вагон 13 катится по рельсам 6 при помаши роликов с гребнем 15, выполненных цилиндрическими во избежание погрешностей по уровню, и прижимается к сплошной рельсовой нитке. Измерение проводят от начальной точки - так называемой синхроточки - на стрелочном переводе 1. Оба лазерных сканера 17 считывают при этом непрерывно в соответствующей плоскости считывания 20, тогда как параллельно с этим с помощью контрольного колеса для измерения расстояния 22 (фиг.1) регистрируется пройденный путь. Скорость в поездке может составлять примерно 1 м/с; на участке остряка скорость примерно в два раза меньше.
В каждой точке измерения 25, определенной путем попадания луча считывания 18 на соответствующий рельс 6 или на элемент стрелочного перевода, измеряют теперь как расстояние от начала координат, так и угол луча считывания 18 в качестве измерительной величины в полярной системе координат. В вычислительном блоке 23, предусмотренном на железнодорожном транспортном средстве 11, эти полярные координаты точек измерения 25 непрерывно преобразовываются с помощью программы в декартовы координаты, и информация перезаписывается в запоминающем устройстве в связи с непрерывным измерением расстояния с помощью колеса для измерения расстояния 22. Измерительные величины могут быть вместе с этим представлены на мониторе 24 с разрешением до 0,1 мм. Наряду с зарегистрированными измерительными величинами перезаписываются соответствующие профили, полученные путем вычислений, и таким образом определяют поперечный профиль стрелочного перевода 1. (Кроме того, при необходимости можно также вручную вводить в программу вычислительного блока 23 и другие данные измерений и/или обнаруженные дефекты).
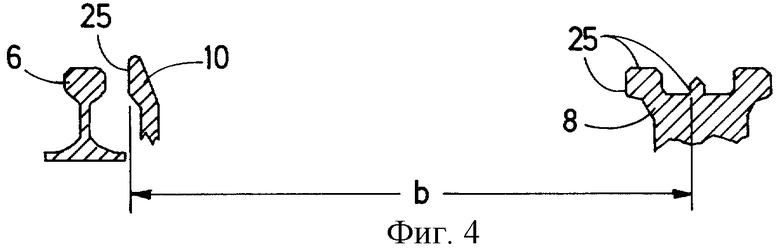
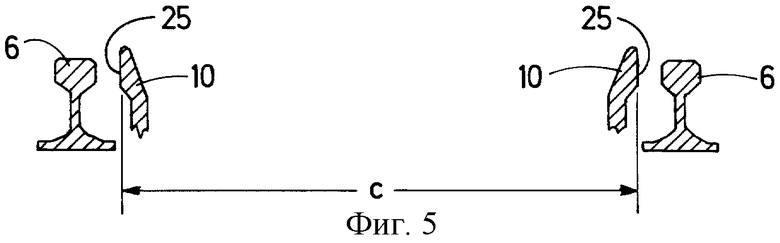
Для измерительных величин, представленных схематично или в качестве иллюстраций частично на фиг.3-5, таких, как, например, ширина колеи а (фиг.3), минимальная ширина между гранью направляющего рельса и боковой гранью ходового рельса в кривой b (фиг.4) или расстояние между направляющими поверхностями контррельсов с (фиг.5), имеется возможность, если смотреть в продольном направлении стрелочного перевода 1 и учесть соответствующий тип стрелочного перевода, в различных точках стрелочного перевода или точках измерения 25 сравнивать отдельные заданные величины, записанные ранее в вычислительном блоке 23, с действительными измеренными величинами. Определив степень отклонения от этих заданных величин, можно точно и быстро определить износ, в частности, в точках измерения 25, в значительной степени определяющих геометрию стрелочного перевода, в проблемных местах стрелочного перевода, которые точно обусловлены особым типом стрелочного перевода.
Соблюдаемые допуски при этом автоматически перепроверяются. Эти допуски составляют у отдельных измерительных величин (например, у тех, которые уже названы: ширина колеи а, минимальная ширина между гранью направляющего рельса и боковой гранью ходового рельса в кривой b, расстояние между направляющими поверхностями контррельсов с, а также, например, ширина зазора между контррельсам и ходовым рельсам, ширина подхода в области контррельса, сквозной зазор или состояние износа остряка) соответственно 0,25 мм. У таких значений, как поперечная высота и перекос рельса, граница допуска составляет 0,5 мм. При превышении допустимых граничных значений с помощью программы составляется сообщение об отдельных погрешностях.
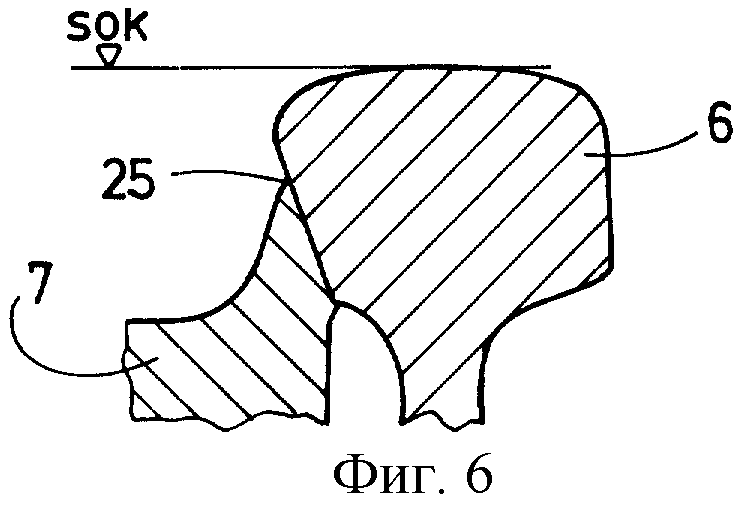
На фиг.6 в качестве примера важного пункта стрелочного перевода представлен стрелочный остряк 7, который прилегает к головке рельса 6 и на верхней грани которого находится точка измерения 25, которую нужно зарегистрировать. Другими примерами наиболее важных точек система стрелочного перевода, регистрируемых локально или контролируемых по пути, являются, например, начало остряка в кривой или начало острия крестовины, жесткой или подвижной. Для того чтобы эти значения можно было зарегистрировать, обслуживающему персоналу поступает видеокартинка. С помощью соответствующих импульсных элементов локально регистрируют точки системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ СОСТОЯНИЯ СТРЕЛОЧНЫХ ПЕРЕВОДОВ И ИХ КРЕСТОВИН | 1989 |
|
RU2013262C1 |
| СПОСОБ ПЕРЕПРОФИЛИРОВАНИЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ОСТРЯКА СТРЕЛОЧНОГО ПЕРЕВОДА, УЛОЖЕННОГО В РЕЛЬСОВОЙ НИТКЕ | 2022 |
|
RU2817446C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ДВИЖУЩИХСЯ ЖЕЛЕЗНОДОРОЖНЫХ РЕЛЬСОВ | 2024 |
|
RU2837941C1 |
| Способ заблаговременной фрагментарной установки одиночного стрелочного перевода на деревянных шпалах | 2021 |
|
RU2762047C1 |
| Универсальный координатно-измерительный шаблон | 2016 |
|
RU2664899C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ЭЛЕКТРОННЫЙ ПУТЕВОЙ ШАБЛОН | 2018 |
|
RU2687537C1 |
| ПОДВИЖНЫЙ РЕЛЬС СТРЕЛОЧНОГО ПЕРЕВОДА | 1993 |
|
RU2071521C1 |
| СПОСОБ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ И СИНХРОНИЗАЦИИ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ | 2018 |
|
RU2680927C1 |
| Способ определения пространственных координат и геометрических параметров рельсового пути и устройство для его осуществления | 2016 |
|
RU2628541C1 |
| СПОСОБ СОЧЛЕНЕНИЯ ОСТРЯКА И РАМНОГО РЕЛЬСА В СТРЕЛОЧНОМ ПЕРЕВОДЕ И СТРЕЛОЧНЫЙ ПЕРЕВОД, ПОЛУЧЕННЫЙ ДАННЫМ СПОСОБОМ | 2023 |
|
RU2814930C1 |
Изобретения относятся к способу и устройству для бесконтактного измерения поперечного профиля или расстояния между рельсами пути. Способ протягивания троса контактной сети (2) заключается в том, что каждый рельс (6) считывается с помощью датчика измерения расстояния (16), расположенного над рельсом, и непрерывно перемещающегося в продольном направлении пути, и сканирующего в плоскости считывания (20), проходящей перпендикулярно продольному направлению пути. Проблемные точки измерения (25) на рельсе, в значительной степени определяющие геометрию стрелочного перевода, регистрируют в качестве измерительных величин в полярной системе координат. Полярные координаты для измерительных величин преобразуют в декартовы координаты, а информацию перезаписывают в запоминающем устройстве в связи с непрерывным измерением расстояния с помощью колеса для измерения расстояния, после чего вычисляют поперечный профиль стрелочного перевода (1) на основании зарегистрированных измерительных значений. Полученные действительные измерительные значения сравнивают в определенных точках измерения (25) с записанными в памяти заданными значениями по меньшей мере для двух из перечисленных параметров: ширина зазора между контррельсом и ходовым рельсом, сквозной зазор или состояние износа остряка, минимальная ширина между гранью направляющего рельса и боковой гранью ходового рельса в кривой, ширина колеи и/или расстояние между контррельсами или направляющими поверхностями, и определение степени отклонения от заданных значений. В устройстве для бесконтактного измерения поперечного профиля или расстояния между рельсами пути каждый датчик измерения расстояния (16) расположен в области над соответствующим ему рельсом (6) и представляет собой лазерный сканер (17) для считывания проблемных точек измерения (25), в значительной степени определяющих геометрию стрелочного перевода, который выполнен с возможностью совершения возвратно-поступательного движения с углом сканирования (α). Технический результат - возможность более быстрого и более точного определения и оценки измерительных величин, важных для состояния стрелочного перевода. 2 н. и 2 з.п. ф-лы, 6 ил.
a) считывание каждого рельса (6) с помощью датчика измерения расстояния (16), расположенного над рельсом, движущегося непрерывно в продольном направлении пути и сканирующего в плоскости считывания (20), проходящей перпендикулярно продольному направлению пути,
b) регистрация проблемных точек измерения (25) на рельсе, в значительной степени определяющих геометрию стрелочного перевода, в качестве измерительных величин в полярной системе координат,
c) преобразование полярных координат для измерительных величин в декартовы координаты и перезапись измерительных величин в запоминающем устройстве в связи с непрерывным измерением расстояния с помощью колеса для измерения расстояния (22),
d) вычисление поперечного профиля стрелочного перевода (1) на основании зарегистрированных измерительных значений,
e) сравнение полученных действительных измерительных значений в определенных точках измерения (25) с записанными в памяти заданными значениями по меньшей мере для двух из перечисленных параметров: ширина зазора между контррельсом и ходовым рельсом, сквозной зазор или состояние износа остряка, минимальная ширина между гранью направляющего рельса и боковой гранью ходового рельса в кривой, ширина колеи и/или расстояние между контррельсами или направляющими поверхностями, и определение степени отклонения от заданных значений.
| СПОСОБ ОПЕРАТИВНО-ТЕХНИЧЕСКОЙ ОХРАНЫ РУБЕЖЕЙ ОБЪЕКТОВ И ГРАНИЦ | 2017 |
|
RU2674809C9 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114950C1 |
| US 3864039, 04.02.1975 | |||
| US 3016464, 09.01.1962. | |||

