Группа изобретений относится к железнодорожному транспорту, в частности к методам непрерывной регистрации пространственного положения рельсовой колеи при натурных съемках, диагностике пути, проектно-изыскательских работах и других видах работ.
Известны способ определения пространственных параметров рельсового пути и устройство для его осуществления, включающие регистрацию данных с датчиков межрельсового расстояния, пройденного пути, текущего курсового угла, продольного и поперечного уклона при движении транспортного средства, вычисление по этим данным текущих координат рельсовой колеи (патент РФ №2261302, E01B 35/00). Регистрацию курсового угла и продольного уклона с указанных датчиков, определение текущих координат Xi, Yi, Hi осуществляют по одной из рельсовых нитей относительно любого исходного направления в горизонтальной плоскости, с шагом измерения 1. Для каждого заданного участка пути Pi по измеренным координатам его крайних точек i0 и in вычисляют координаты точки icp, соответствующей середине прямолинейного отрезка, соединяющего эти точки. По разностям между вычисленной координатой и измеренной координатой указанной точки определяют значения стрелы изгиба  ,
,  в горизонтальной и вертикальной плоскостях. Известное устройство для определения пространственных параметров рельсовых путей содержит ходовую тележку, включающую опорное колесо и расположенные на одной оси над одной из рельсовых нитей первое и второе измерительные колеса и мерное колесо. Опорное колесо связанно с измерительными колесами установленной под углом 90° относительно направления движения штангой, на которой установлен датчик ширины колеи. На мерном колесе смонтирован датчик пути. На оси, связывающей измерительные колеса, установлен курсокреноуказатель. Выходы датчика пути, датчика ширины колеи и курсокреноуказателя связаны через контроллер с компьютером. Известное техническое решение позволяет одновременно с определением пространственных координат определять взаимное положение отрезков пути в вертикальной и горизонтальной плоскостях (рихтовку и просадку).
в горизонтальной и вертикальной плоскостях. Известное устройство для определения пространственных параметров рельсовых путей содержит ходовую тележку, включающую опорное колесо и расположенные на одной оси над одной из рельсовых нитей первое и второе измерительные колеса и мерное колесо. Опорное колесо связанно с измерительными колесами установленной под углом 90° относительно направления движения штангой, на которой установлен датчик ширины колеи. На мерном колесе смонтирован датчик пути. На оси, связывающей измерительные колеса, установлен курсокреноуказатель. Выходы датчика пути, датчика ширины колеи и курсокреноуказателя связаны через контроллер с компьютером. Известное техническое решение позволяет одновременно с определением пространственных координат определять взаимное положение отрезков пути в вертикальной и горизонтальной плоскостях (рихтовку и просадку).
Однако данный способ для измерения координат и геометрических параметров рельсового пути является достаточно трудоемким, так как включает измерения курсового угла, продольных и поперечных уклонов, ширины колеи. Для этих целей необходимо использование кусокреноуказателя (инерциальная система), датчика пути, датчика ширины колеи, которые при подготовке и в процессе работы требуют калибровки и настройки. При этом необходимо, чтобы все указанные измерения были синхронизированы. Калибровка датчиков также является проблемой, усложняющей работу устройства, понижающей производительность как при измерениях, так и при обработке данных. Кроме того, конструкция, включающая гироскопы и акселерометры (инерциальные системы), не обеспечивает работу в абсолютных системах координат с привязкой к пунктам геодезической сети.
Известен также способ измерения и контроля состояния железнодорожного пути, основанный на технологии навигации ГЛОНАСС/GPS, реализованный с помощью путеизмерительной тележки, содержащей раму, опирающуюся на ходовое устройство с четырьмя роликами, закрепленную на раме тяговую рукоятку, а также смонтированную на раме контрольно-измерительную систему (патент РФ №99758, B61K 9/08, прототип). Указанная контрольно-измерительная система содержит мультиантенную систему навигации, закрепленную в верхней части рамы по центру тележки. Мультиантенная система навигации состоит из ГЛОНАСС/GPS антенны с приемником. В состав контрольно-измерительной системы входят также бесплатформенная инерциальная навигационная система, установленная на раме под ГЛОНАСС/GPS антенной с приемником, и датчики, установленные в нижней части рамы на заданном расстоянии от мультиантенной системы навигации, с внутренней стороны пути выше головки рельс, между передними и задними роликами. Кроме того, контрольно-измерительная система оборудована бортовым компьютером, закрепленным на тяговой рукоятке тележки, и аккумуляторной батареей, смонтированной на раме тележки. Датчики путеизмерительной тележки представляют собой бесконтактные сканеры верхних и боковых внутренних граней головок рельсов. ГЛОНАСС/GPS антенна с приемником, бесплатформенная инерциальная навигационная система и датчики через разъем соединены с бортовым компьютером. Вдоль железнодорожного пути смонтирована сеть референцных станций с навигационным оборудованием. Бортовой компьютер контрольно-измерительной системы и референцные станции дополнительно оснащены устройствами приема/передачи информации GSM/GPRS, 3G, 4G и т.п.
Недостатком данного технического решения является то, что в нем предусмотрено измерение большого количества (семи) исходных параметров: курсовой угол, продольный и поперечный угол, лазерное сканирование правой и левой головок рельсов, измерение пути, измерение координат. Кроме того, к недостаткам известного устройства следует отнести сложность конструкции, так как устройство включает инерциальную систему, лазерные сканеры и другие датчики, требующие синхронизации измерений каждого датчика при работе со спутниковой системой позиционирования ГНСС. При подготовке устройства к работе и во время его работы необходимо при движении поездов останавливаться и корректировать уход оси гироскопа, что снижает производительность работ. Сложные конструктивные решения снижают надежность измерений и повышают их трудоемкость. В целом, указанные недостатки обуславливают невысокую точность измерений параметров рельсового пути при реализации данного технического решения,
Задачей изобретения является повышение производительности работ при проведении натурных съемок с обеспечением высокой точности измерений.
Техническим результатом изобретения является упрощение технологии измерений и конструкции устройства с обеспечением высоких точностных характеристик результатов измерений.
Заявленный технический результат достигается за счет того, что в способе определения пространственных координат и геометрических параметров рельсового пути с использованием путеизмерительной тележки, снабженной спутниковой системой навигации ГНСС, согласно изобретению при движении путеизмерительной тележки по рельсовому пути осуществляют непрерывную регистрацию координат фазовых центров принимающих сигналы ГНСС спутниковых антенн, установленных над левой и правой нитями рельсового пути, над соответствующими колесными парами на расположенной перпендикулярно относительно направления движения раме путеизмерительной тележки, при этом указанные спутниковые антенны устанавливают так, что их фазовые центры лежат на одной прямой в плоскости, перпендикулярной направлению движения, по текущим значениям координат Х1, Y1, Н1 и Х2, Y2, Н2, фазовых центров первой и второй указанных спутниковых антенн и по их приращениям определяют пространственные координаты и геометрические параметры рельсового пути.
Заявленный технический результат достигается также тем, что устройство для определения пространственного положения и геометрических параметров рельсового пути согласно изобретению характеризуется тем, что оно содержит путеизмерительную тележку, включающую подвижную и неподвижную колесные пары, связанные между собой опорной рамой, установленной перпендикулярно относительно направления движения, при этом в оконечных частях указанной опорной рамы над соответствующими рельсовыми нитями установлены первая и вторая спутниковые антенны, фазовые центры которых лежат на одной прямой в плоскости, перпендикулярной направлению движения путеизмерительной тележки, указанные спутниковые антенны связаны соответственно с первым и вторым входами спутникового приемника, вход-выход которого связан с принимающим сигналы базовой спутниковой станции модемом, а выход указанного спутникового приемника соединен с бортовым компьютером.
При этом указанный бортовой компьютер снабжен вычислительной программой, осуществляющей пересчет регистрируемых текущих значений координат Х1, Y1, Н1 и Х2, Y2, Н2 фазовых центров указанных спутниковых антенн в пространственные координаты и геометрические параметры рельсового пути.
Получаемые указанные параметры рельсового пути графически отображаются в реальном масштабе времени на дисплее бортового компьютера.
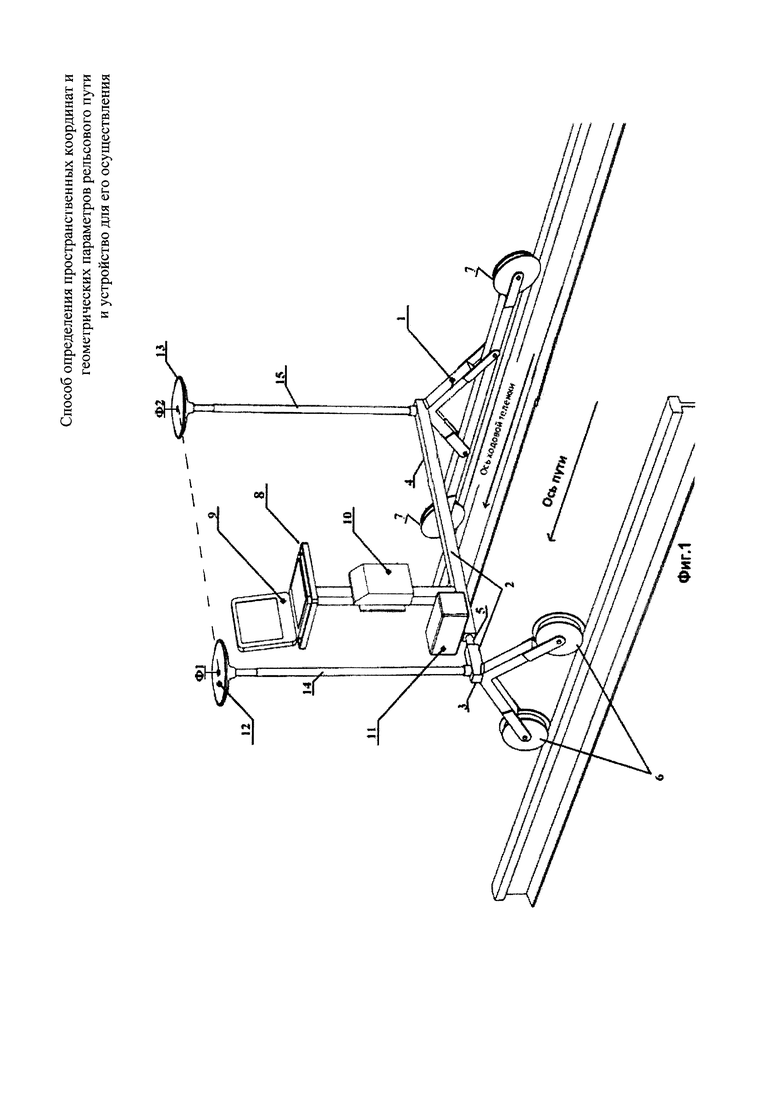
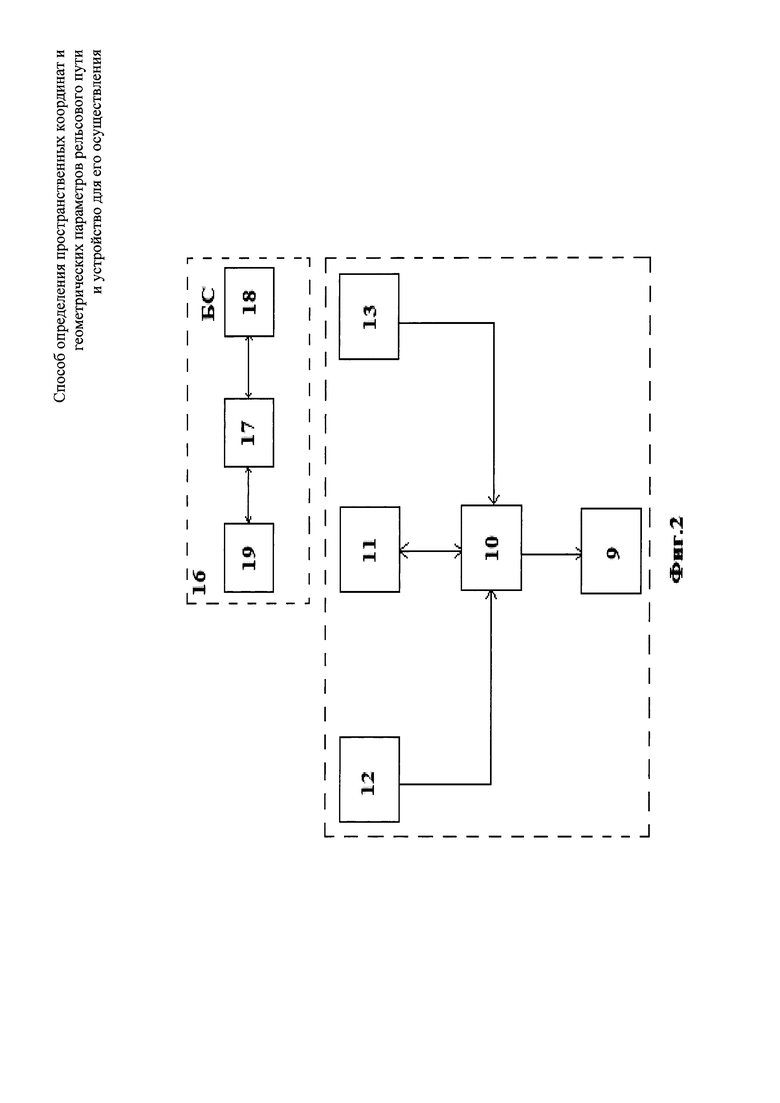
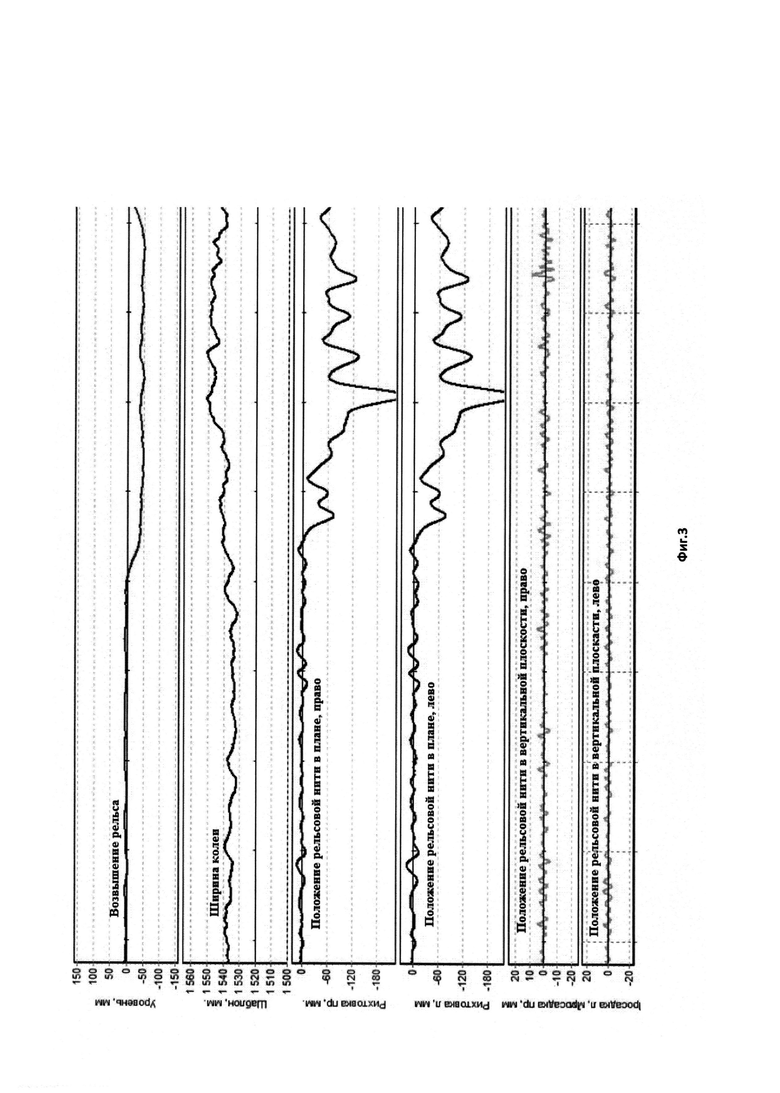
На фиг. 1 представлен общий вид устройства, реализующего способ, согласно изобретению, на фиг. 2 - то же, структурная схема, на фиг. 3 приведен фрагмент графиков, иллюстрирующих конкретную реализацию способа, согласно изобретению.
Устройство (фиг. 1) содержит ходовую тележку 1, выполненную в виде разборной рамы 2, состоящей из подвижной части 3 и неподвижной части 4, соединенные между собой с возможностью перемещения подвижной части относительно неподвижной в зависимости от ширины колеи - направляющей 5. На подвижной части 3 установлены колесная подвижная пара 6, опирающаяся на первую рельсовую нить. На неподвижной части рамы 4 ходовой тележки 1 установлена колесная неподвижная пара 7. Рама 2, опирающаяся с помощью колесных пар 6 и 7 на рельсы, установлена перпендикулярно (под углом преимущественно 90°) относительно направления движения по рельсовой колее. На раме 2 установлена платформа 8, на которой установлен бортовой компьютер 9, соединенный со спутниковым приемником 10, связанным с модемом 11. В оконечных частях указанной опорной рамы 2 над соответствующими рельсовыми нитями установлены первая и вторая спутниковые антенны 12 и 13, фазовые центры Ф1 и Ф2 которых лежат на одной прямой в плоскости, перпендикулярной направлению движения ходовой тележки. Спутниковые антенны 12 и 13 связаны соответственно с первым и вторым входами спутникового приемника 10, вход-выход которого связан с модемом 11, принимающим сигналы базовой спутниковой станции 16. Выход указанного спутникового приемника 10 соединен с бортовым компьютером 9. Спутниковые антенны 12 и 13 установлены в оконечных частях рамы 2 на стойках 14 и 15 соответственно.
Устройство связано базовой спутниковой референцной станцией 16 ГНСС, включающей спутниковый приемник 17, связанный с модемом 18 и антенной 19.
Ходовую тележку 1 устанавливают на рельсовый путь, включают спутниковую аппаратуру (приемник 10, модем 11 и антенны 12 и 13), а также бортовой компьютер 9. На опорной геодезической точке (точке с известными координатами) запускается базовая станция 16 (фиг.2). С базовой станции 16 модем 18 передает дифференциальные поправки через модем 11 на приемник 10, который получает также пространственную информацию со спутниковых антенн 12 и 13.
При движении ходовой тележки по рельсовому пути колесные пары 6 и 7 жестко прижимаются к рельсам за счет действия направляющей 5, обеспечивая положение оси ходовой тележки, строго параллельное направлению движения по рельсовой колее независимо от ее изменения. Поэтому спутниковая антенна 12 с фазовым центром Ф1 и спутниковая антенна 13 фазовым центром Ф2, установленные над рельсами на стойках 14 и 15, при изменении ширины колеи также перемещаются в пространстве в поперечной плоскости и всегда находятся соответственно над левым и правым рельсами. При этом фазовые центры Ф1 и Ф2 спутниковых антенн 12 и 13 находятся на одной прямой в плоскости, перпендикулярной к оси тележки, которая совпадает с вектором движения.
Данные о текущих координатах фазовых центров спутниковых антенн 12 и 13, Ф1 (Х1, Y1, Н1) и Ф2 (Х2, Y2, Н2) в каждой i-ой точке на рельсовом пути регистрируют над правой и левой рельсовой нитью с заданным интервалом, принимаются спутниковым приемником 10 и поступают в компьютер 9.
Компьютер 9 в соответствии с разработанными авторами вычислительными программами последовательно осуществляет следующие действия.
1. Определяет для каждой i -ой точки рельсового пути текущие координаты оси рельсового пути  ,
,  , и
, и  как
как
 ;
;
 ;
;
 .
.
2. Для редуцирования координат , , оси железнодорожного пути с антенн 12 и 13 на уровень головок рельсов используются известные в геодезии вычислительные процедуры с получением значений координат  ,
,  и
и  оси пути (редуцированные).
оси пути (редуцированные).
3. Пройденное расстояние Sn при движении ходовой тележки по рельсовому пути определяется по формуле:
 , где
, где
n - число единичных приращений отрезков пути
 ,
,
 ;
;
 .
.
4. Ширина рельсовой колеи  определяется в каждой i-ой точке по приращениям
определяется в каждой i-ой точке по приращениям  и
и  текущих координат фазовых центров Ф1 и Ф2 как
текущих координат фазовых центров Ф1 и Ф2 как
 , где
, где
 ;
;
 .
.
.5. Поперечный уклон γ рельсового пути определяют как
 .
.
6. Стрелы изгиба в плане (рихтовка) для левой и правой рельсовой нити определяют, как
 ;
;
 , где
, где
 ;
;
 ;
;
 ;
;
 ,
,
 ,
,  - координаты средней точки отрезка пути
- координаты средней точки отрезка пути  заданной длины, n - число единичных приращений пути на заданном отрезке
заданной длины, n - число единичных приращений пути на заданном отрезке 
7. Стрелы изгиба в вертикальной плоскости (просадка) вычисляют как
 ;
;
 .
.
Таким образом, по текущим координатам фазовых центров Ф1 и Ф2 в процессе движения ходовой тележки и по приращениям координат между фазовыми центрами Ф1 и Ф2 антенн 12 и 13 определяются значение ширины колеи  , далее по разности высот Hi между упомянутыми фазовыми центрами Ф1 и Ф2 и значению ширины
, далее по разности высот Hi между упомянутыми фазовыми центрами Ф1 и Ф2 и значению ширины  колеи вычисляется возвышение (поперечный угол наклона) рельса γ, по приращению редуцированных координат оси рельсового пути вычисляется пройденное расстояние S.
колеи вычисляется возвышение (поперечный угол наклона) рельса γ, по приращению редуцированных координат оси рельсового пути вычисляется пройденное расстояние S.
Все получаемые данные отображаются в реальном масштабе времени на дисплее компьютера 9 в виде графиков геометрии железнодорожного пути в стандартных форматах (ЦП 515). В качестве примера фрагмент реальных графиков геометрии железнодорожного пути, полученных при реализации технического решения, согласно изобретению приведен на фиг.3.
Техническое решение согласно изобретению позволило исключить из процесса измерений использование инерциальной системы для определения угловых величин, в том числе платформы для угловой ориентации инерциальной системы. Кроме того, данная технология не предусматривает использование каких-либо отдельных измерительных датчиков, таких как датчик ширины колеи и датчик пути.
В целом, совокупность существенных признаков группы изобретений обеспечила существенное упрощение конструкции устройства, упрощение технологии и повышение производительности при проведении различного рода работ, связанных с контролем состояния железнодорожного пути, с обеспечением надежности и высокой точности проводимых измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2013 |
|
RU2551637C2 |
| Способ выправки железнодорожного пути и устройство для его осуществления | 2023 |
|
RU2824765C1 |
| Способ определения ровности покрытия автомобильных дорог | 2023 |
|
RU2832694C2 |
| Способ определения параметров геометрии рельсовой колеи и система для его осуществления | 2018 |
|
RU2686341C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РОВНОСТИ ПОКРЫТИЯ АВТОМОБИЛЬНЫХ ДОРОГ | 2023 |
|
RU2820228C1 |
| Способ автоматического контроля качества уплотнения балластного слоя рельсового пути и устройство для его осуществления | 2018 |
|
RU2703819C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ КОЛЕИ | 1995 |
|
RU2123445C1 |
| ПУТЕИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС ПТ-9 | 2007 |
|
RU2438902C2 |
| Устройство для контроля состояния рельсового пути и для определения его пространственных координат | 2022 |
|
RU2793310C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ ПАРАМЕТРОВ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2261302C2 |
Техническое решение относится к области железнодорожной автоматики и телемеханики для непрерывной регистрации пространственного положения рельсовой колеи. Устройство, реализующее способ определения пространственных координат и геометрических параметров рельсового пути, содержит путеизмерительную тележку, включающую подвижную и неподвижную колесные пары, связанные между собой опорной рамой, установленной перпендикулярно относительно направления движения, при этом в оконечных частях указанной опорной рамы над соответствующими рельсовыми нитями установлены первая и вторая спутниковые антенны. Причем фазовые центры антенн лежат на одной прямой в плоскости, перпендикулярной направлению движения путеизмерительной тележки, указанные спутниковые антенны связаны соответственно с первым и вторым входами спутникового приемника, вход-выход которого связан с принимающим сигналы базовой спутниковой станции модемом, а выход указанного спутникового приемника соединен с бортовым компьютером. Достигается упрощение конструкции устройства. 2 н. и 2 з.п. ф-лы, 3 ил.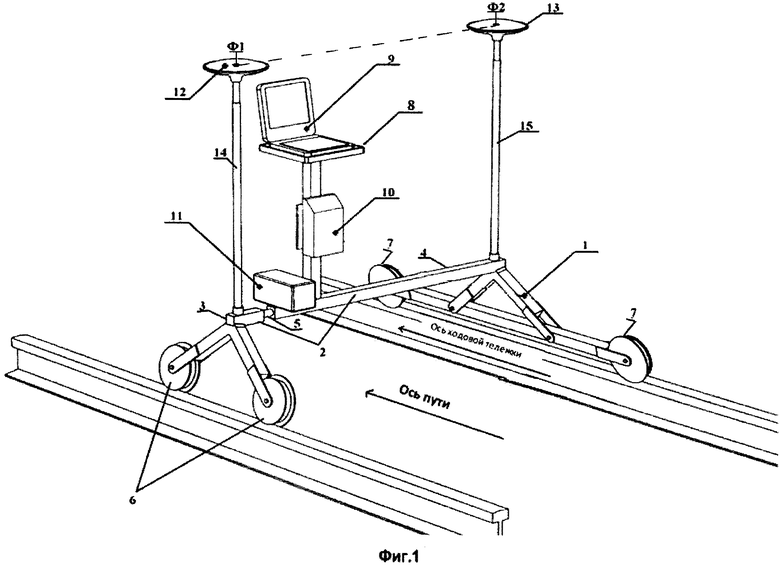
1. Способ определения пространственных координат и геометрических параметров рельсового пути с использованием путеизмерительной тележки, снабженной спутниковой системой навигации ГНСС, отличающийся тем, что при движении путеизмерительной тележки по рельсовому пути осуществляют непрерывную регистрацию координат фазовых центров принимающих сигналы ГНСС спутниковых антенн, установленных над левой и правой нитями рельсового пути, над соответствующими колесными парами на расположенной перпендикулярно относительно направления движения раме путеизмерительной тележки, при этом указанные спутниковые антенны устанавливают так, что их фазовые центры лежат на одной прямой в плоскости, перпендикулярной направлению движения, по текущим значениям координат X1, Y1, H1 и Х2, Y2, Н2 фазовых центров указанных первой и второй спутниковых антенн соответственно, и по их приращениям определяют пространственные координаты и геометрические параметры рельсового пути.
2. Устройство для определения пространственных координат и геометрических параметров рельсового пути, содержащее путеизмерительную тележку, включающую подвижную и неподвижную колесные пары, связанные между собой опорной рамой, установленной перпендикулярно относительно направления движения, при этом в оконечных частях указанной опорной рамы над соответствующими рельсовыми нитями, установлены первая и вторая спутниковые антенны, фазовые центры которых лежат на одной прямой в плоскости, перпендикулярной направлению движения путеизмерительной тележки, указанные спутниковые антенны связаны соответственно с первым и вторым входами спутникового приемника, вход-выход которого связан с принимающим сигналы базовой спутниковой станции модемом, а выход указанного спутникового приемника соединен с бортовым компьютером.
3. Устройство по п. 2, отличающееся тем, что указанный бортовой компьютер снабжен вычислительной программой, осуществляющей пересчет регистрируемых текущих значений координат X1, Y1, H1 и Х2, Y2, Н2 фазовых центров указанных спутниковых антенн в пространственные координаты и геометрические параметры рельсового пути.
4. Устройство по пп. 2 или 3, отличающееся тем, что получаемые параметры рельсового пути графически отображаются в реальном масштабе времени на дисплее указанного бортового компьютера.
| Прибор для изучения характера движения минеральных зерен при гравитационных методах обогащения | 1954 |
|
SU99758A1 |
| СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ ТОПОГРАФИЧЕСКОЙ СЪЕМКИ ДОРОЖНОГО ПОЛОТНА (ВАРИАНТЫ) И СПОСОБ ВЫПОЛНЕНИЯ ТОПОГРАФИЧЕСКОЙ СЪЕМКИ | 2000 |
|
RU2165595C1 |
| Устройство для прошивки ферритовых матриц | 1961 |
|
SU147033A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ НА ОСНОВЕ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ GPS/GLONASS | 2009 |
|
RU2419103C1 |
| СПОСОБ И СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МОБИЛЬНОГО ТЕРМИНАЛА ВНУТРИ ЗДАНИЙ НА ОСНОВЕ ГЛОНАСС-ПОДОБНОГО СИГНАЛА | 2012 |
|
RU2533202C2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |

