Изобретение относится к транспортной технике и может быть применено в фермерских хозяйствах для обработки усадеб.
Известно шагающее транспортное средство по патенту Российской федерации №2149118, выданному 20.05.3000 года. Оно содержит раму, руль, переднее и боковое опорные колеса, кривошип и пару шагающих движителей с опорными пятами. Шаговые движения опорных пят у него совершаются всегда по одной траектории, которая задана шагающими движителями, и не зависят от неровностей поверхности земли.
Недостатком известного шагающего транспортного средства является сложность и наличие шаговых вертикальных колебаний, вызываемых неровностью поверхности земли.
Техническая задача устройства состоит в том, чтобы упростить конструкцию шагающих движителей и ликвидировать вызываемые неровностями поверхности земли вертикальные колебания рамы.
Поставленная задача выполняется за счет того, что шагающее транспортное средство, содержащее раму, переднее и боковое опорные колеса, кривошип и пару шагающих движителей с опорными пятами, имеет шагающие движители в виде соосно установленных на раме, направленных вниз и связанных кулисами с кривошипом через расположенные через 180° на кривошипе ползуны коренных рычагов, на свободном конце каждого из которых шарнирно закреплен направленный вниз-назад опорный рычаг с опорной пятой на конце и нижним шарниром в средней части, который соединен через направленный штоком вниз гидроцилиндр с верхним шарниром, расположенным на раме в центре кривизны дугообразной траектории движения нижнего шарнира, полученной при прямолинейной горизонтальной траектории движения опорной пяты, а полости гидроцилиндра, закрепленного на его корпусе гидроконденсатора, соединены между собой через гидрокран с двухплечим рычажком, открытый в переднем в закрытый в заднем положениях нижнего плеча рычажка, при этом передние плечи рычажков связаны между собой через тяги и закрепленное на раме коромысло для получения противоположно направленного хода между ними, а нижние плечи соединены с задней частью рамы через пружины для подпружинивания рычажков в момент нахождения корпусов гидроцилиндров в переднем положении, переднее же положение каждого нижнего плеча задано упором, а заднее - защелкой, закрепленными на корпусе гидроцилиндра, причем свободный конец защелки контактирует с закрепленным на раме упором для выведения из зацепления нижнего плеча в момент поворота кривошипа в направлении вращения опорных колес от положения, когда соответствующий ползун находится на соединяющем центры вращения кривошипа и коренного рычага отрезке, на угол 270°.
Предлагаемое устройство позволит получить эффективный перенос опорных пят благодаря кулисному соединению шаговых движителей с кривошипом, позволит фиксировать положение зацепленных с землей опорных пят согласно уровня земли в месте зацепления благодаря применению гидроцилиндров с автоматически управляемыми гидрокранами, наконец, позволит исключить из шаговых движителей механизмы вертикального перемещения опорных пят.
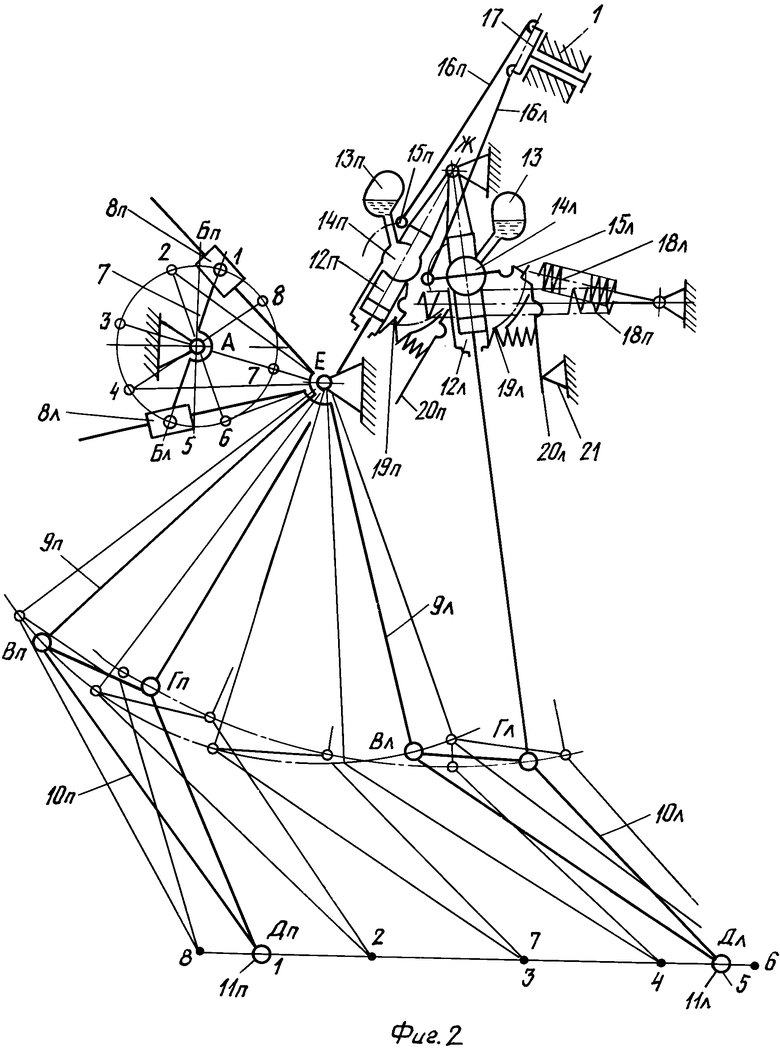
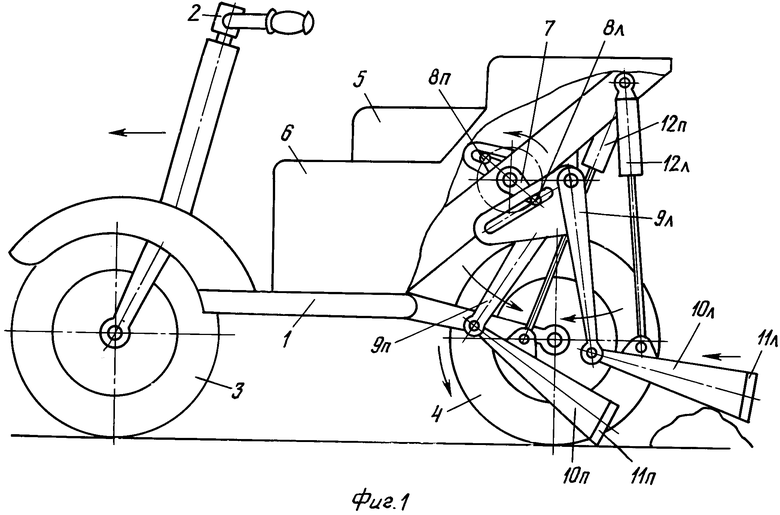
Сущность изобретения поясняется чертежами, где на фиг.1 изображен общий вид шагающего транспортного средства, на фиг.2 изображена кинематическая схема шагающих движителей.
Шагающее транспортное средство содержит раму 1, соединенное с рулем 2 переднее опорное колесо 3, боковое опорное колесо 4, сиденье 5, кожух двигателя внутреннего сгорания 6, кривошип 7 с расположенными на нем через 180° правым и левым ползунами 8 и пару шагающих движителей в виде правого и левого плоских четырехзвенных шарнирных механизмов. Каждый из шагающих движителей имеет шарнирно закрепленный на раме направленный вниз и связанный через его кулису и соответствующий ползун с кривошипом коренной рычаг 9. На свободном конце коренного рычага шарнирно закреплен направленный вниз-назад опорный рычаг 10 с опорной пятой 11 на конце и нижним шарниром "Г" в средней части, который соединен через направленный штоком вниз гидроцилиндр 12 с верхним шарниром "Ж", расположенным на раме в центре кривизны дугообразной траектории движения нижнего шарнира "Г1Г5", полученной при прямолинейной горизонтальной траектории движения опорной пяты "Д1Д5". Полости гидроцилиндра и закрепленного на его корпусе гидроконденсатора 13 соединены между собой через гидрокран 14 с двухплечим рычажком 15. Передние плечи рычажков левого и правого движителей связаны между собой через тяги 16 в закрепленное на раме коромысло 17 для получения противоположно направленного хода рычажков. Нижние плечи рычажков соединены с задней частью рамы через пружины 18, расположенные с таким расчетом, чтобы во всех положениях рычажков при переднем наклоне оси корпуса гидроцилиндра в направлении по "ЖГ1" они были натянутыми, в направлении по "ЖГ5" - ненатянутыми. Переднее положение нижнего плеча рычажка задано упором 19, а заднее - защелкой 20, закрепленными на корпусе гидроцилиндра. Свободный конец защелки контактирует с закрепленным на раме упором 21 для выведения из зацепления нижнего плеча в момент поворота кривошипа в направлении вращения опорных колес от положения, когда соответствующий ползун находится на соединяющем центры вращения кривошипа и коренного рычага отрезке "АЕ", на угол 270°.
Работа устройства. При вращении кривошипа 7 в направлении вращения опорных колес 3 и 4 ползуны 8 будут совершать движение по окружности с центром "А", а связанные с ними через кулисы коренные рычаги 9 будут совершать возвратно-поступательное движение и перемещать шарнирные соединения "В" с опорными рычагами 10 по окружности с центром "Е". Расположенные на опорных рычагах нижние шарниры "Г" будут совершать движение по окружности с центром "Ж", а опорные пяты 11 - по горизонтальной линии.
При движении ползуна по дальней от центра вращения "Е" коренного рычага полуокружности Б1-Б2-Б3-Б4-Б5 опорная пята перемещается назад относительно рамы 1 по прямому горизонтальному отрезку Д1-Д2-Д3-Д4-Д5, и т.к. при этом кран 14 находится в закрытом положении, а гидроцилиндр 12 соответственно в жестком и опорная пята в зацепленном с землей положениях, то рама перемещается вперед относительно земли. При движении ползуна по ближней от центра вращения коренного рычага полуокружности Б5-Б6-Б7-Б8-Б1 опорная пята в интервале Б5-Б6 продолжает перемещаться назад, замедляя скорость до нуля, в интервале Б6-Б7-Б8 перемещается вперед, увеличивая скорость в первой половине интервала и замедляй ее до нуля во второй половине интервала, и в интервале Б8-Б1 перемещается назад, увеличивая скорость до первоначальной, и т.к. при этом гидрокран находится в открытом положении, а гидроцилиндр соответственно в плавающем и опорная пята в скользящем по земле положениях, то шагающий движитель свободно совершает перенос опорной пяты.
Переключения гидрокранов происходят следующим образом.
Пусть началом отсчета будет положение кривошипа, когда ползун находится на соединяющем центры вращения кривошипа и коренного рычага отрезке АЕ в положении Б7. Когда угол поворота кривошипа будет приближаться к 270°, первый шагающий движитель будет приближаться с закрытым гидрокраном к положению 5, а второй - с открытым гидрокраном соответственно к положению 1. (На фиг.2 первым шагающим движителем показан левый, а вторым - правый). Пружина 18 нижнего плеча рычажка 15 гидрокрана второго шагающего движителя, закрепленного на корпусе гидроцилиндра, будет натянутой за счет удаления корпуса гидроцилиндра от закрепленного на раме ее конца, а свободный конец защелки 20 первого шагающего движителя, закрепленной на корпусе гидроцилиндра, дойдет до закрепленного на раме упора 21. Под действием упора защелка повернется и освободит из зацепления нижнее плечо рычажка гидрокрана первого шагающего движителя. Под действием натянутой пружины связанные между собой через тяги 16 и коромысло 17 рычажки гидрокранов первого и второго шагающих движителей повернутся, причем рычажок гидрокрана первого шагающего движителя повернется в переднее положение до упора 19 и откроет гидрокран, а рычажок гидрокрана второго шагающего движителя - в заднее положение для зацепления с защелкой и закроет гидрокран.
Технико-экономическая эффективность данного предложения заключается в том, что у предлагаемого транспортного средства эффективные шагающие движители позволят повысить скорость и обеспечить плавность движения, а так же упростить конструкцию.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2010 |
|
RU2452646C2 |
| ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2516958C1 |
| ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2011 |
|
RU2489296C2 |
| ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1998 |
|
RU2149118C1 |
| Модуль колёсно-гусеничного движителя и шасси с двумя модулями | 2022 |
|
RU2784225C1 |
| Кривошипно-ползунный направляющий механизм для ноги шагающего движителя | 1990 |
|
SU1751038A1 |
| Колесно-шагающий движитель транспортного средства | 2024 |
|
RU2824228C1 |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 1993 |
|
RU2095269C1 |
| СНЕГОХОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2559395C2 |
| Многоопорный шагающий движитель | 1990 |
|
SU1801854A1 |
Изобретение относится к транспортной технике и может быть применено в фермерских хозяйствах для обработки усадеб. Шагающее транспортное средство содержит раму, переднее и боковое опорные колеса и шарнирный механизм. Шарнирный механизм с кулисой и гидроцилиндр с автоматическим краном обеспечивают плавное выравнивание скорости при переносе опорной пяты и рельефное фиксирование ее положения при зацеплении с землей. Технический результат - повышение эффективности переноса опорной пяты и исключение вертикальных колебаний рамы. 2 ил.
Шагающее транспортное средство, содержащее раму, переднее и боковое опорные колеса, кривошип и пару шагающих движителей с опорными пятами, отличающееся тем, что шагающие движители выполнены в виде соосно установленных на раме, направленных вниз и связанных кулисами с кривошипом через расположенные через 180° на кривошипе ползуны коренных рычагов, на свободном конце каждого из которых шарнирно закреплен направленный вниз-взад опорный рычаг с опорной пятой на конце и нижним шарниром в средней части, который соединен через направленный штоком вниз гидроцилиндр с верхним шарниром, расположенным на раме в центре кривизны дугообразной траектории движения нижнего шарнира, полученной при прямолинейной горизонтальной траектории движения опорной пяты, а полости гидроцилиндра и закрепленного на его корпусе гидроконденсатора соединены между собой через гидрокран с двухплечим рычажком, открытый в переднем и закрытый в заднем положениях нижнего плеча рычажка, при этом передние плечи рычажков связаны между собой через тяги и закрепленное на раме коромысло для получения противоположно направленного хода между ними, а нижние плечи соединены с задней частью рамы через пружины для подпружинивания рычажков в момент нахождения корпусов гидроцилиндров в переднем положении, переднее же положение каждого нижнего плеча задано упором, а заднее - защелкой, закрепленными на корпусе гидроцилиндра, причем свободный конец защелки контактирует с закрепленным на раме упором для выведения из зацепления нижнего плеча в момент поворота кривошипа в направлении вращения опорных колес от положения, когда соответствующий ползун находится на соединяющем центры вращения кривошипа и коренного рычага отрезке, на угол 270°.
| ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1998 |
|
RU2149118C1 |
| Кривошипно-ползунный направляющий механизм для ноги шагающего движителя | 1990 |
|
SU1751038A1 |
| Устройство для перемещения и сборки цилиндрических изделий | 1989 |
|
SU1691239A1 |
| DE 4028773 А1, 18.04.1991. | |||

