Изобретение относится к транспортному машиностроению, в частности к шагающим движителям.
Известны механизмы ног транспортных средств, содержащих бедро с нижним и верхним горизонтальными шарнирами, к нижнему из которых присоединена голень с опорной пятой, а к верхнему- корпус двухстепенного шарнира, вертикальная ось которого жестко закреплена к раме транспортного средства, индивидуальные приводы поворота корпуса двухстепенного Шарнира, бедро и голень.
Недостатками механизма является необходимость использования последовательно работающих приводов, наличие которых усложняет процесс управления и конструкцию моханизмов ног.
Известен механизм ноги шагающей машины, содержащий каретки, смонтированные в горизонтальных направляющих, приводы вертикального и горизонтального перемещений.
о
со
00
Недостатком является использование последовательно работающих двух приводов, усложняющих конструкцию механизма.
Наиболее близким техническим реше- нием, принятым за прототип, является кри- вошипно-ползунный направляющий механизм, содержащий основание с прямолинейной направляющей, установленный на основание V-образный двуплечий криво- шип и установленный в ее направляющей первый ползун, связанный с первым плечом кривошипа кинематической цепью, второй ползун, установленный в прямолинейной направляющей первого ползуна, и связанный с вторым плечом кривошипа с помощью второй кинематической цепи, идентичной первой, кулису, средней частью шарнирно связанную с вторым ползуном, камень которой шарнирно связан с первым ползуном, регулировочный ползун, установленный на свободном конце кулисы с возможностью перемещения и фиксации, исполнительное звено, средней частью шарнирно связанное со свободным концом кулисы и выполненное в виде двуплечего рычага, одно плечо которого шарнирно связана с помощью жесткого соединительного звена с регулировочным ползуном, а конец другого плеча исполни- тельного звена воспроизводит замкнутую траекторию, высота которой регулируется путем ручной перестановки положения регулировочного ползуна на кулисе.
Этот механизм можно использовать как механизм ноги шагающего движителя, но его недостатками являются сложность конструкции и отсутствие автоматического изменения высоты траектории конца исполнительного звена при движении по неровной поверхности
Цель изобретения - упрощение конструкции и обеспечение автоматического изменения высоты траектории конца исполнительного звена при движении по неровной поверхности.
Цель достигается тем, что идентичные кинематические цепи, связывающие ползуны с соответствующими V-образного кривошипа заменены двумя шатунами одинаковой длины, а для обеспечений автоматического изменения высоты траектории исполнительной точки при движении по неровной поверхности регулировочный ползун снабжен электромагнитным охватом, сердечник которого одним концом связан с возвратной пружиной, установленной на корпусе электромагнитного схвата, а другой конец сердечника выполнен в виде зубца, а на свободном конце кулисы, скользящей внутри регулировочного ползуна, выполнены пазы, с возможностью зацепления с зубцом сердечника, причем регулировочный ползун на свободном конце кулисы удерживается в определенном (нейтральном) положении с помощью двух компенсирующих пружин, установленных на том же конце кулисы, а на направляющей основания механизма установлены два концевых переключателя на местах подхода ползунов к правому и левому крайним положениям и связанных с электрической цепью сердечника электромагнитного схвата через источник питания, а ползуны снабжены упорами, переключающими электрическую цепь электромагнитного схвата, а на конце исполнительного звена шарнирно установлена опорная пята.
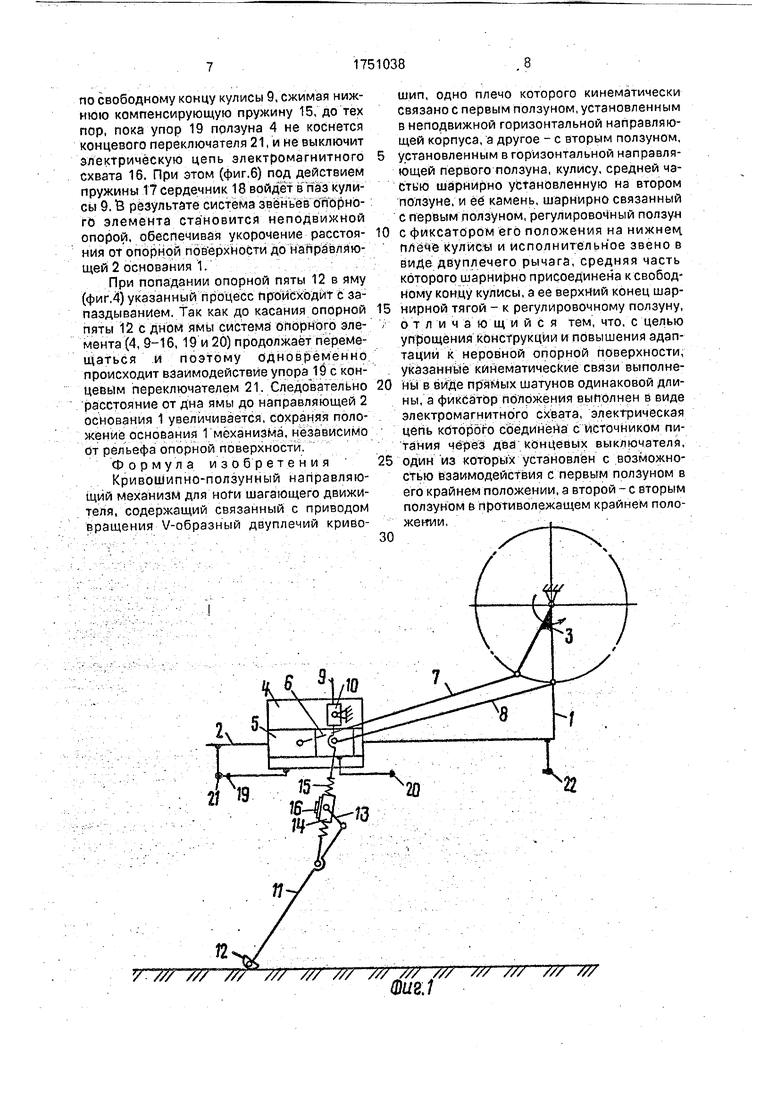
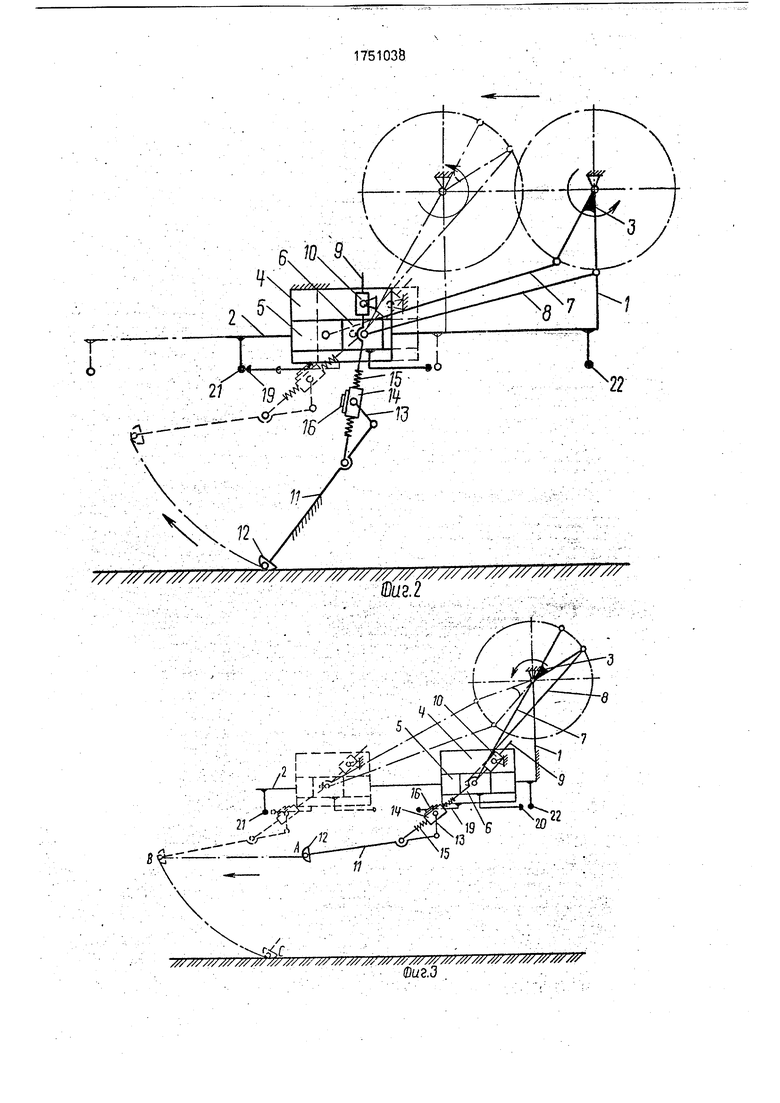
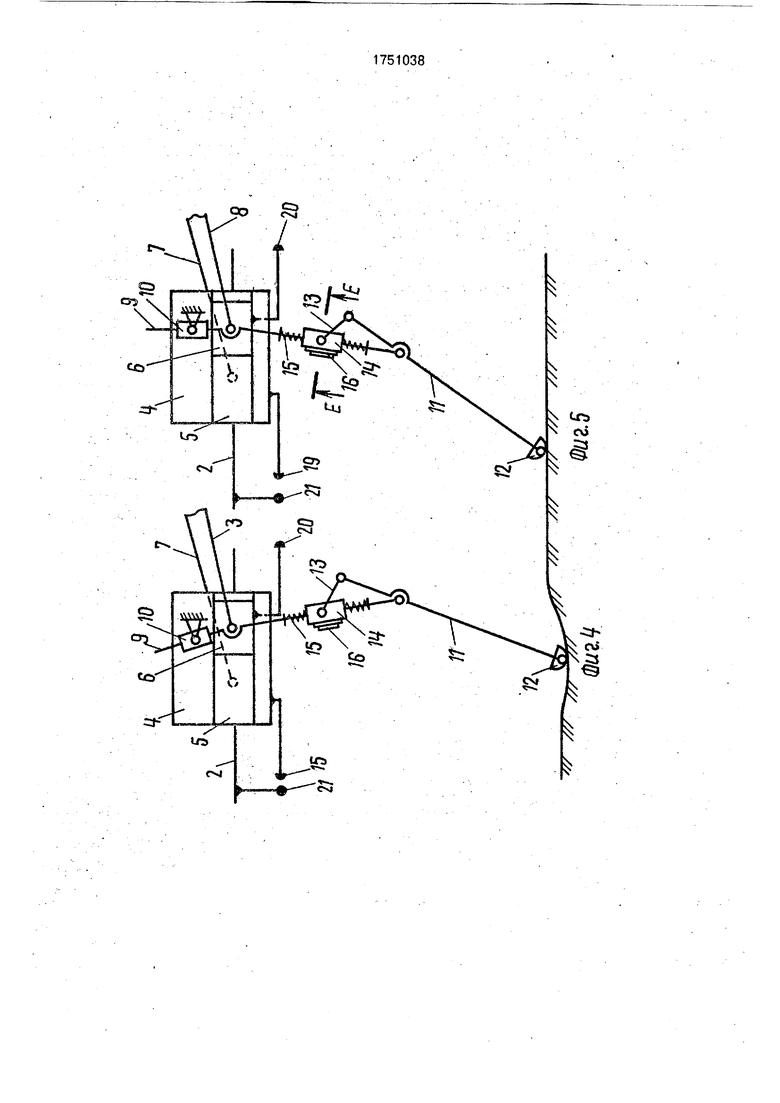
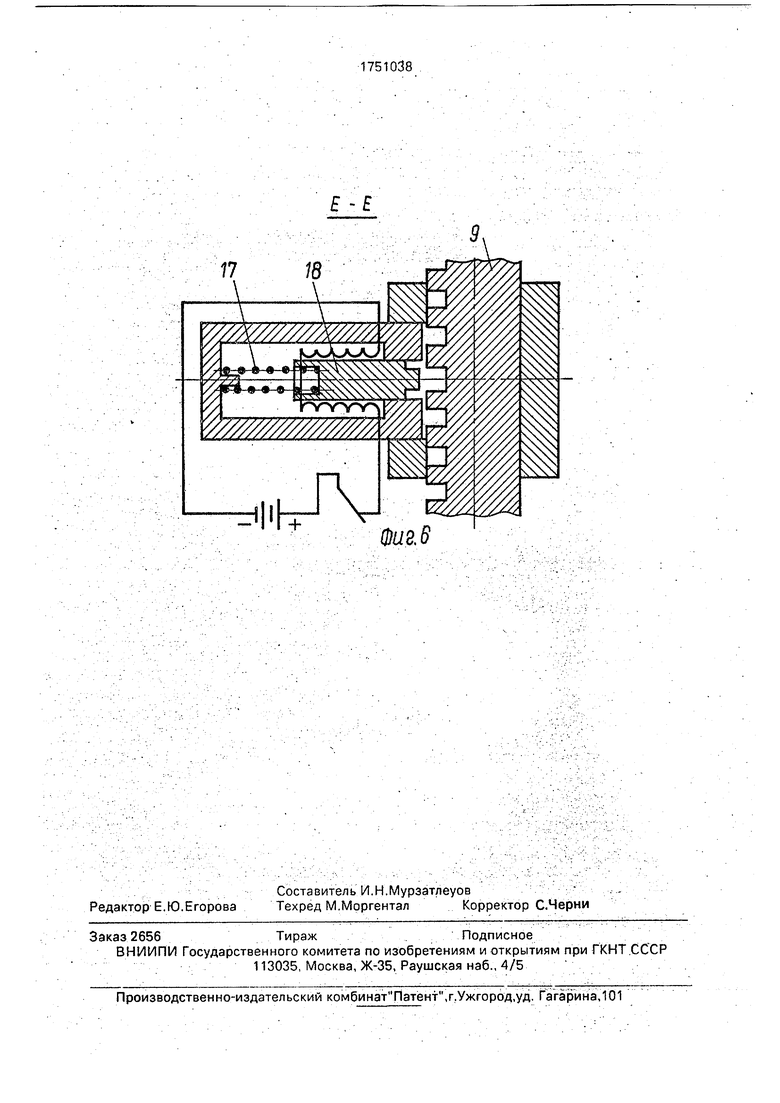
На фиг.1 - кинематическая схема механизма ноги шагающего движителя; на фиг.2 - схема механизма в момент перемещения основания и подьема опорной пяты (линия DA); на фиг 3 - траектория переноса (линия АВ) опускания опорной пяты (линия ВС); на фиг.4 и фиг 5 - процесс адаптации при наезде на почву или попадании ноги в яму; на фиг 6 - сечение Е-Е на фиг.5.
Кривошипно-ползунный механизм ноги шагающего движителя содержит основание 1 (фиг.1) с жестко установленной на нем направляющей 2, V-образный двуплечий кривошип 3 с одинаковыми длинами плеч, ползун 4, установленный в направляющей 2 с выполненной в нем прямолинейной направляющей 5, продольная ось которой совмещена с продольной осью направляющей 2, ползун 6, установленный в направляющей 5 ползуна 4, шатуны 7 и 8, шарнирно связывающие ползуны 4 и 6 с плечами кривошипа 3, кулису 9 средней частью связанную с шарниром ползуна 6, камень 10 которой шарнирно связан с ползуном 4, исполнительное звено 11, средней частью шарнирно связанное со свободным концом кулисы 9, опорную пяту 12, шарнирно связанную с нижним концом исполнительного звена 11, жесткое соединительное звено 13, соединяющее шарнир регулировочного ползуна 14 с верхним концом исполнительного звена 11, компенсирующие пружины 15, установленные на свободном конце кулисы 9 и удерживающие в определенном (нейтральном) положении регулировочный ползун 14, электромагнитный схват 16, установленный на регулировочном ползуне 14 и содержащий возвратную пружину 17 и сердечник 18 (фиг.6), упор 19 (фиг.1), установленный на ползуне 4, упор 20, установленный на ползуне 6, концевой переключатель 21 установленный на направ- ляющей 2 на месте подхода ползуна 4 к
левому крайнему положению, концевой переключатель 22,аналогично установленный на направляющей 2 на месте подхода ползуна 6 к правому крайнему положению,
Механизм ноги работает следующим образом (фиг. 1).
Вращательное движение V-образного равноплечего кривошипа 3 (плечи которого образуют между собой жесткий угол), установленного на основание 1 с направляющей 2, передается к шатунам 7 и 8 одинаковой длины и от них к системе опорного элемента, а именно к ползунам А и 6, кулисе 9 с камнем 10, исполнительному звену 11, опорной пяте 12, жесткому соединительному звену 13, регулировочному ползуну 14, пружинам 15, электромагнитному схвату 16, упорам 19 и 20,
В силу того, что ползуны 4 и б при непрерывном вращении кривошипа 3 в разные моменты времени подходят к местам своих крайних положений на направляющей 2, и поэтому в правом и левом крайних положениях ползунов 4 и б происходит их относительное перемещение, которое сопровождается относительным перемещением всех звеньев системы опорного элемента (4, б, 9-16, 19 и 20). Тем самым происходит подъем или опускание опорной пяты 12 относительно опорной поверхности.
На большей части угла поворота кривошипа 3 ползуны 4 и 6, а также звенья систе- мы опорного элемента двигаются совместно, сохраняя относительную неподвижность.
Этапы движения механизма происходят в следующей последовательности.
В момент, когда опорная пята 12 касается поверхности земли (фиг.2), упор 19 пол- зуна 4 взаимодействует с концевым переключателем 21 и выключает электрическую цепь электромагнитного схвата 16, в результате зуб сердечника 18 под действием пружины 17 (фиг.6) входит в паз свободного конца кулисы 9 При этом система опорного элемента, состоящая из звеньев 4.6,9-16,19 и 20, образует неподвижную опору.
Далее вращательное движение от кривошипа 3 передается к основанию с направляющей 2 (фиг.2), которые перемещаются справа налево относительно ползуна 4, который в данный момент вместе со звеньями системы опорного элемента неподвижен, до тех пор пока место правого крайнего положения ползуна 6 на направляющей 2 не совпадает с неподвижным в данный момент ползуном 6. Дальнейшее вращение кривошипа 3 (фиг.2) приводит к остановке основания 1 с направляющей 2 и ползун 4 начнет
перемещаться относительно ползунз 6, который пока еще неподвижен (положение которого на фиг,2 показано осевой линией). При этом камень 10 перемещаясь вместе с ползуном 4 поворачивает по ходу часовой стрелки верхний конец кулисы 9 вокруг шарнира ползуна 6, а свободный конец которого поднимает вверх исполнительное звено 11, опорную пяту 12,
соединительное звено 13, пружину 15 и электромагнитный схват 16. При этом опорная пята 12 отрывается от опорной поверхности и поднимается по траектории DA (на фиг,2 показано осевой линией). Одновременно концевой переключатель 22 взаимодействует с упором 20 и включает электрическую цепь электромагнитного схвата 16 в результате зуб сердечника 18 выходит из паза кулисы 9 и регулировочный
ползун 14 под действием компенсирующих пружин 15 на свободном конце кулисы 9 займет нейтральное положение.
Кривошипно-ползунный направляющий механизм ноги будучи опорно-двигательным аппаратом движителя будет связан с общей рамой движителя, поэтому он удерживается на весу относительно рамы движителя за счет других опорных ног
Дальнейшее вращение кривэшипэ 3
(фиг.З) передается через шатуны 7 и 8 к ползунам 4 и 6, входящих в систему опорного элемента, и они совместно перемещзются- справа налево относительно неподвижной направляющей 2 основания 1 (на фиг 3 правое крайнее положение показано сплошной линией, а левое - осевой линией) При этом опорная пята 12 в поднятом положении перемещается по верхнему участку траектории АВ (перенос ноги), до тех пор, пока ползун 6 не дойдет до левого крайнего положения и не
остановится, в этот момент ползун 4 еще продолжает перемещаться справа налево, следо- вательно, происходит относительное перемещение их, а также звеньев системы опорного элемента обратно предыдущему. В
результате опорная пята 12 опускается на опорную поверхность по траектории ВС Дальнейший цикл повторяется.
Адаптация к неровностям опорной по- верхности происходит следующим образом. Когда опорная пята 12 (фиг.5) опускается на опорную поверхность и кулиса 9 продолжает вращаться против хода часовой стрелки вокруг шарнира ползуна 6 за счет относи- тельного перемещении ползунов 4 и б, происходит поворот исполнительного звена 11 вокруг опорной пяты 12, который через жесткое соединительное звено 13 перемещает регулировочный ползун 14 вниз
по свободному концу кулисы 9, сжимая нижнюю компенсирующую пружину 15, до тех пор, пока упор 19 ползуна 4 не коснется концевого переключателя 21, и не выключит электрическую цепь электромагнитного схвата 16. При отом (фиг.6) под действием пружины 17 сердечник 18 войдет в паз кулисы 9. В результате система звеньев опорного элемента становится неподвижной опорой, обеспечивая укорочение расстояния от опорной поверхности до направляющей 2 основания 1.
При попадании опорной пяты 12 в яму (фиг.4) указанный процесс происходит с запаздыванием. Так как до касания опорной пяты 12с дном ямы система опорного элемента (4, 9-16,19 и 20) продолжает перемещаться и поэтому одновременно происходит взаимодействие упора 19 с концевым переключателем 21. Следовательно расстояние от дна ямы до направляющей 2 основания 1 увеличивается, сохраняя положение основания 1 механизма, независимо от рельефа опорной поверхности Формула изобретения Кривошипно-ползунный направляющий механизм для ноги шагающего движителя, содержащий связанный с приводом вращения V-образный двуплечий кривои
г,
5,
lAffi
п
10
15
20
25
шип, одно плечо которого кинематически связано с первым ползуном, установленным в неподвижной горизонтальной направляющей корпуса, а другое - с вторым ползуном, установленным в горизонтальной направляющей первого ползуна, кулису, средней частью шарнирно установленную на втором ползуне, и её камень, шарнирно связанный с первым ползуном, регулировочный ползун с фиксатором его положения на нижней плече кулис« и исполнительное звено в виде двуплечего рычага, средняя часть которого шарнирно присоединена к свободному концу кулисы, а ее верхний конец шарнирной тягой - к регулировочному ползуну, отличающийся тем, что, с целью упрощения конструкции и повышения адаптации к неровной опорной поверхности, указанные кинематические связи выполнены в виде прямых шатунов одинаковой длины, а фиксатор положения выполнен в виде электромагнитного схвата, электрическая цепь которого соединена с источником питания через два концевых выключателя, один из которых установлен с возможностью взаимодействия с первым ползуном в его крайнем положении, а второй - с вторым ползуном в противолежащем крайнем положении

| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2003 |
|
RU2255875C1 |
| Шагающий движитель транспортного средства | 1990 |
|
SU1776602A1 |
| ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2516958C1 |
| ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2010 |
|
RU2452646C2 |
| ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2011 |
|
RU2489296C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438858C2 |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2009938C1 |
| МНОГООПОРНАЯ ШАГАЮЩАЯ МАШИНА | 2003 |
|
RU2258624C2 |
| Многоопорный шагающий движитель | 1990 |
|
SU1801854A1 |
| Манипулятор | 1984 |
|
SU1227459A1 |
Использование: относится к конструкции шагающих движителей. Сущность изобретения: механизм содержит V-образный двуплечий кривошип 3, соединенный шатунами 7 и 8 с двумя ползунами, первый 4 из которых установлен в горизонтальной направляющей 2 корпуса 1, а второй 6 - в направляющей 5 ползуна 4. На ползуне 6 шарнирно смонтирована кулиса 9, камень 10 которой шарнирно прикреплен к ползуну 4. На кулисе 9 установлен регулирующий ползун 14, который имеет электромагнитный схват 16, электрическая часть которого соединена с источником питания через концевые выключатели 21 и 22, взаимодействующие соответственно с упорами 19 и 20 Опорная плита 12 установлена на конце ис- полТштельного звена 11, которое тягой 13 присоединено к ползуну 14. При вращении кривошипа 3 опорная пята 12 совершает замкнутую траекторию с прямым участком снизу, при этом она опускается на грунт в разблокированном схвате 16. В крайнем положении ползуна 4 концевой выключатель выключает цепь схвата, который возвратной пружиной блокирует ползун 14 и опорную пяту 12. В крайнем положении ползуна 6 концевой выключатель замыкает цепь и схват 16 отпускает кулису с опорной пятой 12. бил. (Л С xj ел
/////// /// 77/ ////// ///////// ////// //////
Фиг.1
С гпф / / / ////////////////////////////////// ////////////////,////////////////
.jy;r
гг
ог
-4Z SHfl/
////////////////////////////////////////////////////////////////// ///
И
ч--4.
Z SHfl/
//////
-4
у r ot и Ufiir
I
qcoisii
05
Ј -f
17
Фи2.8
| Опора шагающего транспортного средства | 1976 |
|
SU716898A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Шагающая машина | 1978 |
|
SU713752A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Авторское свидетельство СССР № 1486680, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
