ел
с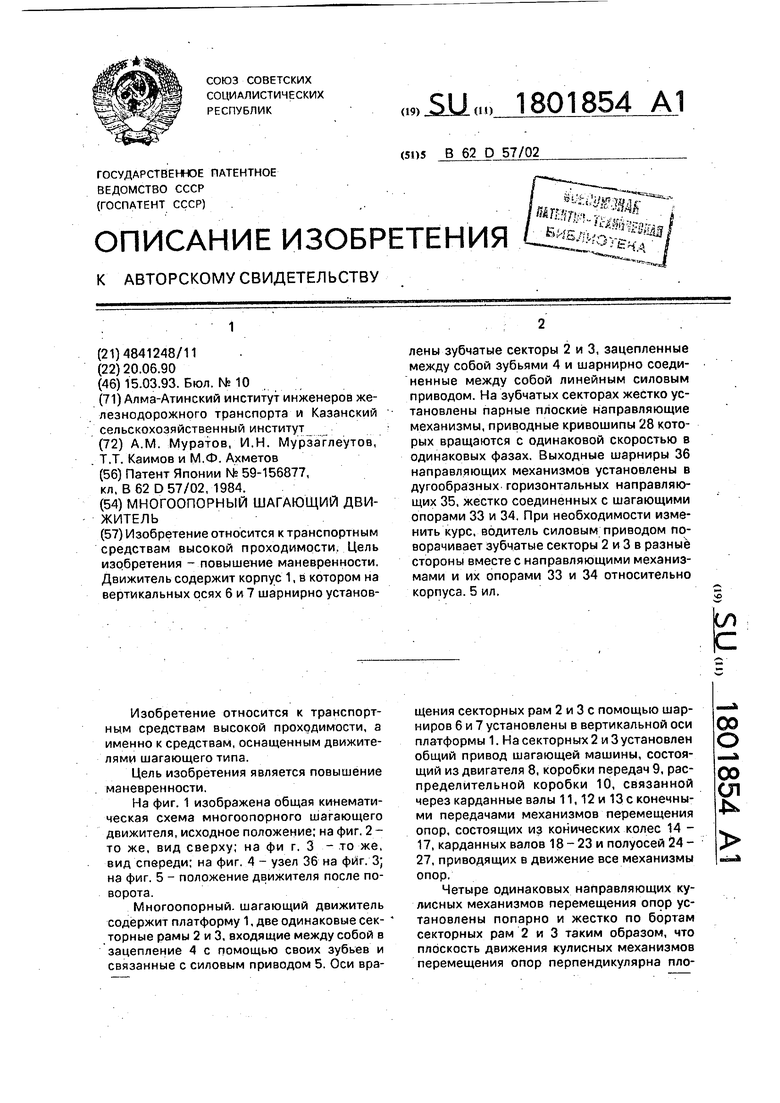
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГООПОРНАЯ ШАГАЮЩАЯ МАШИНА | 2003 |
|
RU2258624C2 |
| ШАГАЮЩАЯ ОПОРА | 1992 |
|
RU2067941C1 |
| ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2003 |
|
RU2255875C1 |
| Колесно-шагающий движитель транспортного средства | 2024 |
|
RU2824228C1 |
| Кривошипно-ползунный направляющий механизм для ноги шагающего движителя | 1990 |
|
SU1751038A1 |
| МОСТОВОЙ ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 2011 |
|
RU2501703C2 |
| МУСКУЛОЛЕТ (ВАРИАНТЫ) | 2022 |
|
RU2786028C1 |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 1993 |
|
RU2101069C1 |
| ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2010 |
|
RU2452646C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2422317C1 |
Изобретение относится к транспортным средствам высокой проходимости, Цель изобретения - повышение маневренности. Движитель содержит корпус 1, в котором на вертикальных осях 6 и 7 шарнирно установлены зубчатые секторы 2 и 3, зацепленные между собой зубьями 4 и шарнирно соединенные между собой линейным силовым приводом. На зубчатых секторах жестко установлены парные плоские направляющие механизмы, приводные кривошипы 28 которых вращаются с одинаковой скоростью в одинаковых фазах. Выходные шарниры 36 направляющих механизмов установлены в дугообразных горизонтальных направляющих 35, жестко соединенных с шагающими опорами 33 и 34, При необходимости изменить курс, водитель силовым приводом поворачивает зубчатые секторы 2 и 3 в разные стороны вместе с направляющими механизмами и их опорами 33 и 34 относительно корпуса. 5 ил.
Изобретение относится к транспорт- ны.м средствам высокой проходимости, а именно к средствам, оснащенным движителями шагающего типа.
Цель изобретения является повышение маневренности.
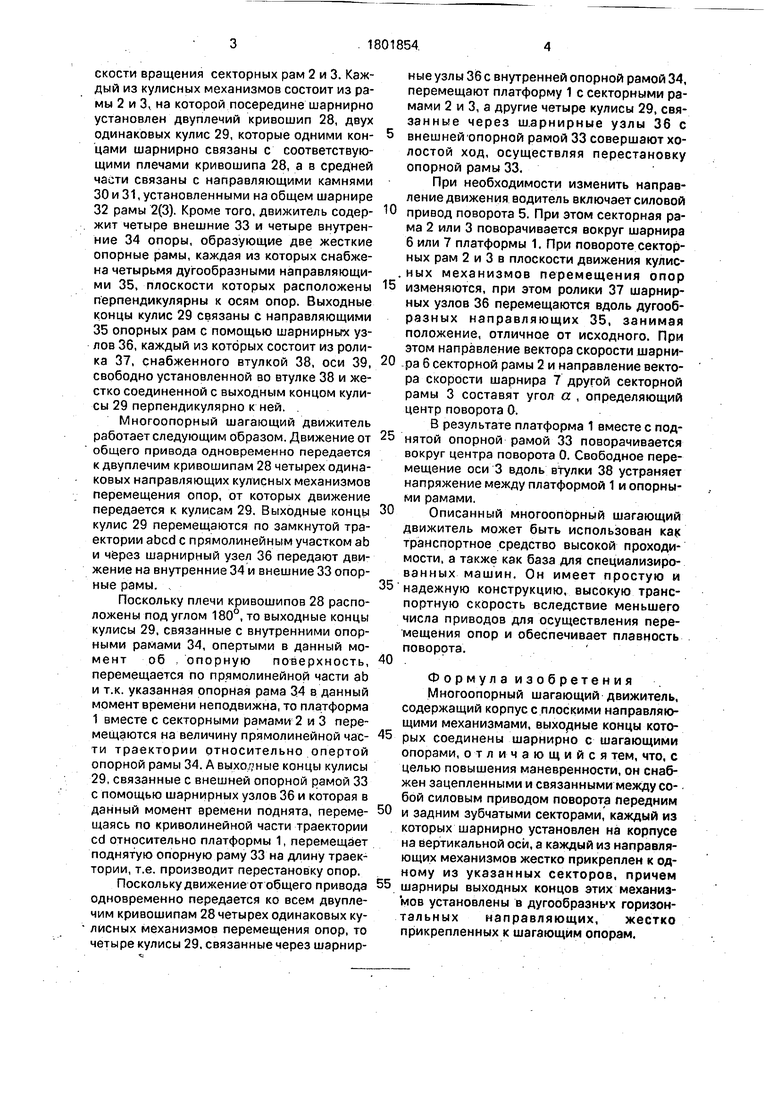
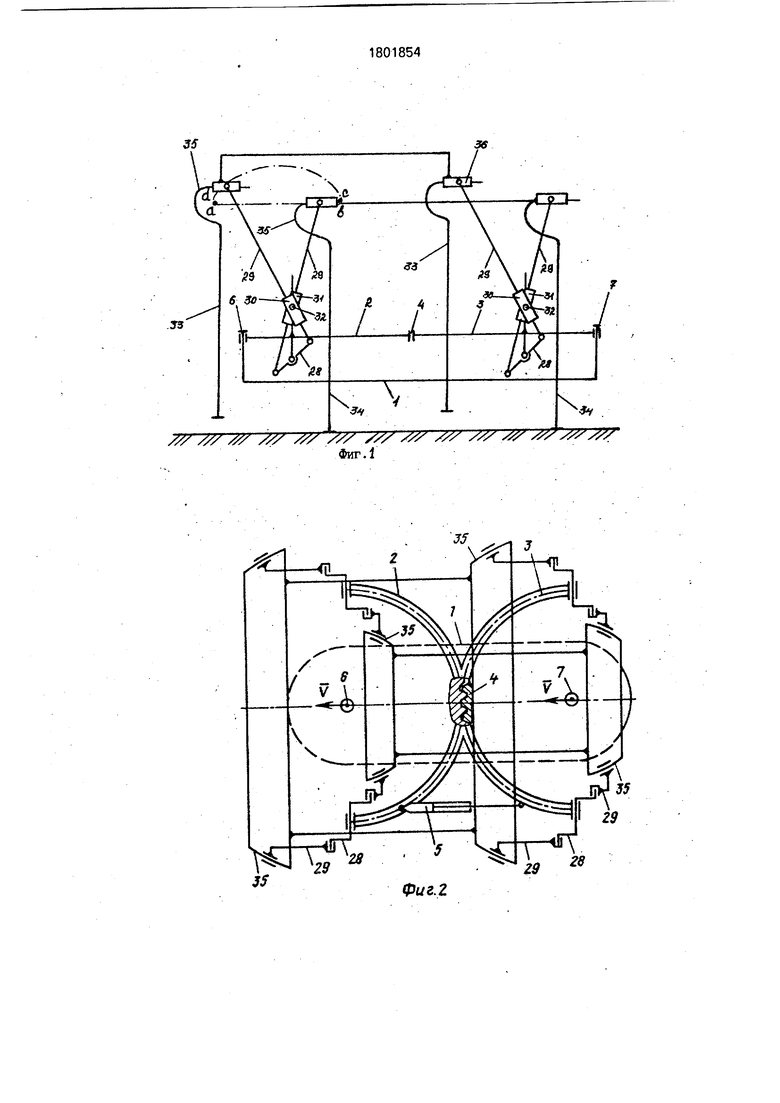
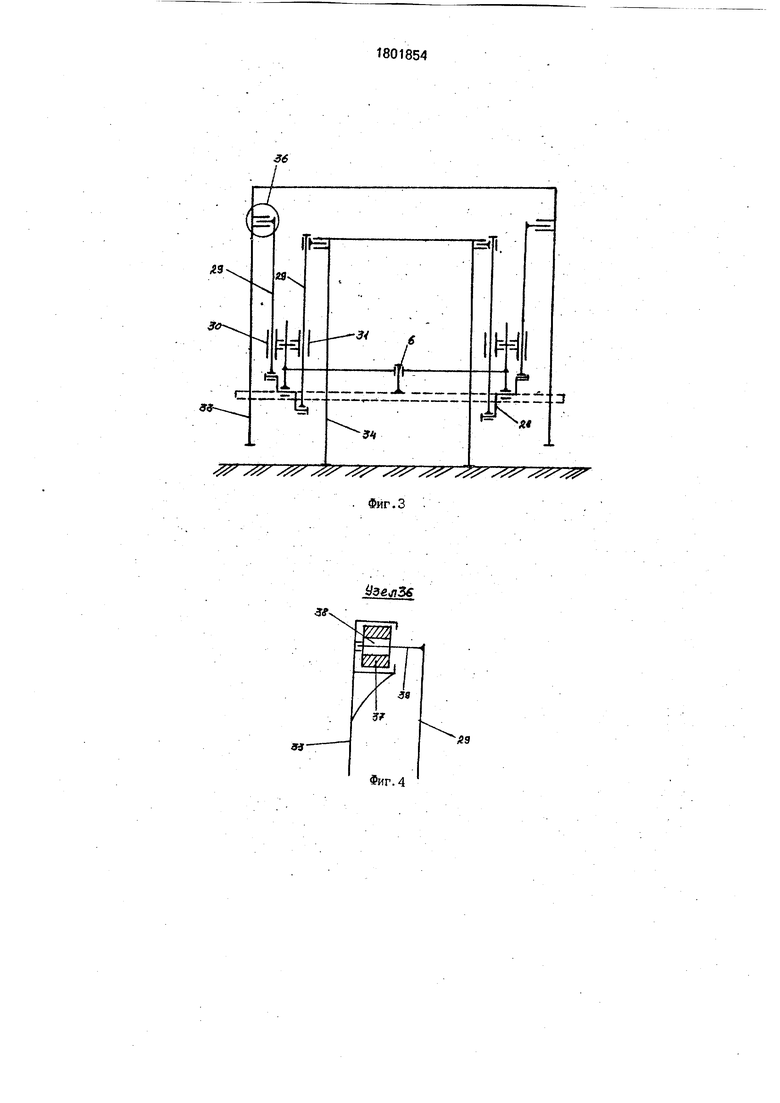
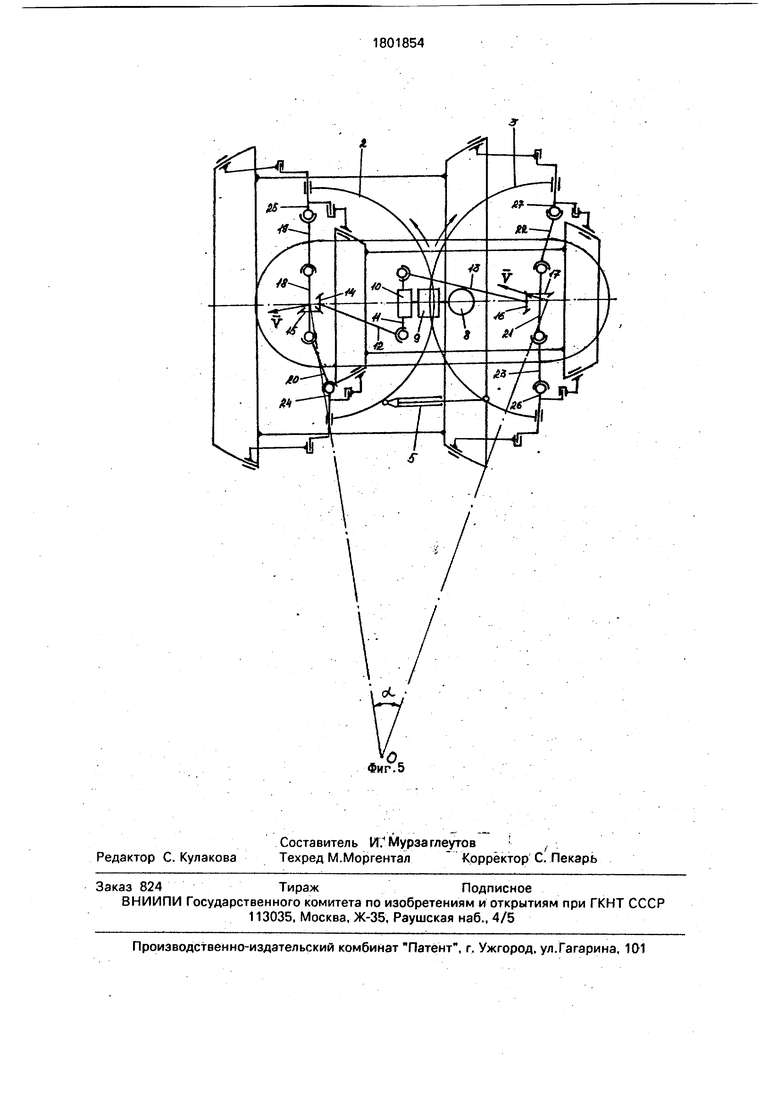
На фиг. 1 изображена общая кинематическая схема многоопорного шагающего движителя, исходное положение; на фиг. 2 - то же, вид сверху; на фи г. 3 - то же, вид спереди; на фиг. 4 - узел 36 на фиг. 3; на фиг. 5 - положение движителя после поворота.
Многоопорный, шагающий движитель содержит платформу 1, две одинаковые секторные рамы 2 и 3, входящие между собой в зацепление 4 с помощью своих зубьев и связанные с силовым приводом 5. Оси вращения секторных рам 2 и 3 с помощью шарниров 6 и 7 установлены в вертикальной оси платформы 1. На секторных 2 и 3 установлен общий привод шагающей машины, состоящий из двигателя 8, коробки передач 9, распределительной коробки 10, связанной через карданные валы 11,12 и 13 с конечными передачами механизмов перемещения опор, состоящих из конических колес 14 - 17, карданных валов 18-23 и полуосей 24- 27, приводящих в движение все механизмы опор.
Четыре одинаковых направляющих кулисных механизмов перемещения опор установлены попарно и жестко по бортам секторных рам 2 и 3 таким образом, что плоскость движения кулисных механизмов перемещения опор перпендикулярна плооо
О
00
ел Јь
скости вращения секторных рам 2 и 3. Каждый из кулисных механизмов состоит из рамы 2 и 3, на которой посередине шарнирно установлен двуплечий кривошип 28, двух одинаковых кулис 29, которые одними концами шарнирно связаны с соответствующими плечами кривошипа 28, а в средней части связаны с направляющими камнями 30 и 31, установленными на общем шарнире 32 рамы 2(3). Кроме того, движитель содержит четыре внешние 33 и четыре внутренние 34 опоры, образующие две жесткие опорные рамы, каждая из которых снабжена четырьмя дугообразными направляющими 35, плоскости которых расположены перпендикулярны к осям опор. Выходные концы кулис 29 связаны с направляющими 35 опорных рам с помощью шарнирных узлов 36, каждый из которых состоит из ролика 37, снабженного втулкой 38, оси 39, свободно установленной во втулке 38 и жестко соединенной с выходным концом кулисы 29 перпендикулярно к ней. .
Многоопорный шагающий движитель работает следующим образом. Движение от общего привода одновременно передается к двуплечим кривошипам 28 четырех одинаковых направляющих кулисных механизмов перемещения опор, от которых движение передается к кулисам 29. Выходные концы кулис 29 перемещаются по замкнутой траектории abed с прямолинейным участком ab и через шарнирный узел 36 передают движение на внутренние 34 и внешние 33 опорные рамы.
Поскольку плечи кривошипов 28 расположены под углом 180°, то выходные концы кулисы 29, связанные с внутренними опорными рамами 34, опертыми в данный момент об , опорную поверхность, перемещается по прямолинейной части ab и т.к. указанная опорная рама 34 в данный момент времени неподвижна, то платформа 1 вместе с секторными рамами 2 и 3 перемещаются на величину прямолинейной части траектории относительно опертой опорной рамы 34. А выходные концы кулисы 29, связанные с внешней опорной рамой 33 с помощью шарнирных узлов 36 и которая в данный момент времени поднята, перемещаясь по криволинейной части траектории cd относительно платформы 1, перемещает поднятую опорную раму 33 на длину траектории, т.е. производит перестановку опор.
Поскольку движение от общего привода одновременно передается ко всем двуплечим кривошипам 28 четырех одинаковых ку- лисных механизмов перемещения опор, то четыре кулисы 29, связанные через шарнирные узлы 36 с внутренней опорной рамой 34, перемещают платформу 1 с секторными рамами 2 и 3, а другие четыре кулисы 29, свя- занные через шарнирные узлы 36 с
внешней опорной рамой 33 совершают холостой ход, осуществляя перестановку опорной рамы 33.
При необходимости изменить направление движения водитель включает силовой
привод поворота 5. При этом секторная рама 2 или 3 поворачивается вокруг шарнира 6 или 7 платформы 1. При повороте секторных рам 2 и 3 в плоскости движения кулис- .ных механизмов перемещения опор
изменяются, при этом ролики 37 шарнирных узлов 36 перемещаются вдоль дугообразных направляющих 35, занимая положение, отличное от исходного. При этом направление вектора скорости шарни ра 6 секторной рамы 2 и направление вектора скорости шарнира 7 другой секторной рамы 3 составят угол а , определяющий центр поворота 0.
В результате платформа 1 вместе с поднятой опорной рамой 33 поворачивается вокруг центра поворота 0. Свободное перемещение оси 3 вдоль втулки 38 устраняет напряжение между платформой 1 и опорными рамами.
Описанный многоопорный шагающий движитель может быть использован как транспортное средство высокой проходимости, а также как база для специализиро- ванных машин. Он имеет простую и
надежную конструкцию, высокую транспортную скорость вследствие меньшего числа приводов для осуществления перемещения опор и обеспечивает плавность поворота.
.
Формулаизобретения Многоопорный шагающий движитель, содержащий корпус с плоскими направляющими механизмами, выходные концы которых соединены шарнирно с шагающими опорами, отличающийся тем, что, с целью повышения маневренности, он снабжен зацепленными и связанными между со- бой силовым приводом поворота передним
и задним зубчатыми секторами, каждый из которых шарнирно установлен на корпусе на вертикальной оси, а каждый из направляющих механизмов жестко прикреплен к одному из указанных секторов, причем
шарниры выходных концов этих механизмов установлены в дугообразных горизонтальных направляющих, жестко прикрепленных к шагающим опорам.
; ЈМНф
s&s s&Z sZZ Л& stf stf x
Ј
8f
I/
W81081
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
