Изобретение относится к шагающим транспортным средствам и, в частности, к их опорам, выполненным в виде бедра и сочлененной с ним голени.
Известен шагающий движитель транспортного средства, имитирующий бедро, голень, выполненные в виде четырехзвенных шарнирных многоугольников, состоящих из продольных и поперечных звеньев, и опорную стопу, шарнирно связанные между собой, при этом привод на движитель выполнен в виде кривошипно-шатунного механизма, связанного шатуном с одним из звеньев бедра, закрепленного шарниром на корпусе, а стопа является нижним поперечным звеном голени.
Недостатком этого движителя является невозможность изменения по ходу движения траектории стопы и отсутствие активного грунтозацепа.
Техническим результатом, на достижение которого направлено изобретение, является повышение проходимости и тяги транспортного средства за счет управления по ходу движения положением стопы и грунтозацепа в фазе опоры.
Указанный технический результат достигается тем, что в шагающем движителе транспортного средства, имитирующего бедро, голень, выполненные в виде четырехзвенных шарнирных многоугольников, состоящих из продольных и поперечных звеньев, и опорную стопу, шарнирно связанные между собой, привод на движитель выполнен в виде кривошипно-шатунного механизма, связанного шатуном с одним из звеньев бедра, закрепленного шарнирно на корпусе, а стопа является нижним поперечным звеном голени, кривошипно-шатунный механизм шарнирно через гидроцилиндры связан с корпусом и снабжен вторым коленом кривошипа, шатун которого связан с рычагом, один конец которого шарнирно подвешен к корпусу через гидроцилиндры, а второй конец шарнирно связан с качающимся ползуном, взаимодействующим с шатуном первого колена кривошипа, верхнее продольное звено бедра также связано с корпусом шарнирно через заднее поперечное звено бедра и гидроцилиндры, одно из продольных звеньев голени снабжено встроенным в него амортизатором, а верхнее продолжение является передним поперечным звеном бедра, продолжение не связанного с приводом продольного звена бедра, является верхним поперечным звеном голени, стопа выполнена в виде шарнирного четырехзвенного многоугольника, верхнее звено которого является продолжением нижнего поперечного звена голени, заднее поперечное звено является продолжением нижней части продольного звена голени, снабженного амортизатором, а переднее поперечное звено снабжено механизмом, шатун привода шарнирно соединен со звеном бедра.
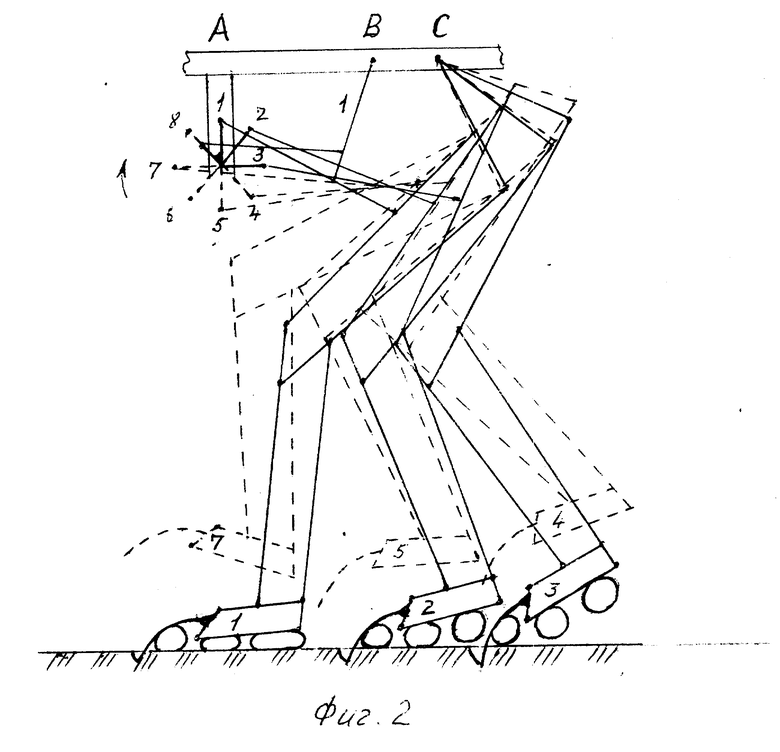
На фиг. 1 изображен движитель; на фиг. 2 некоторые возможные последовательные положения стопы и грунтозацепа в цикле движения, где сплошной линией отмечены положения в опорной фазе цикла, а штрихами в переносной фазе цикла.
Движитель состоит из корпуса 1, на котором подвижно установлен ведущий двухколенный кривошип 2 привода, соединенный одним коленом с шатуном 3, проходящим через ползун 4, поворотно установленный на рычаге 5, установленном на корпусе 1 и соединенном вторым шатуном 6 со вторым коленом кривошипа 2. Другим концом шатун 3 шарнирно соединен с верхним продольным звеном 7 бедра, соединенным одним концом с задним поперечным звеном 8 бедра, подвижно установленным на корпусе 1, а другим концом соединенным с продолжением заднего продольного звена 9 голени, снабженным встроенным амортизатором 10. Продолжение звена 8 шарнирно соединено с нижним продольным звеном 11 бедра, продолжение которого шарнирно пересекается с передним 12 и задним 9 продольными звеньями голени, образуя верхнее поперечное звено голени. Переднее продольное звено голени 12 шарнирно соединено одним концом с продолжением звена 11 бедра, а другим с верхним продольным звеном 13 стопы, являющимся нижним поперечным звеном голени. Звено 13 одним концом соединено с нижним продолжением звена 9 голени, а другим с передним поперечным звеном 14, снабженным грунтозацепом 15. Нижнее продольное звено 16 стопы шарнирно соединено со звеньями 9 и 14. Для смягчения взаимодействия стопы с грунтом звено 16 и грунтозацеп 15 снабжены упругостями 17, например, пневматиками. Опорные шарниры звеньев 2 и 6 привода и звена 8 направляющего механизма соединены с корпусом 1 через дистанционно управляемые гидроцилиндры 18.
Движитель работает следующим образом.
При вращении ведущего кривошипа 2 соединенный с ним шатун 3, перемещаясь в ползуне 4, передает через звено 7 бедра голени и стопе с грунтозацепом переносное маятниковое движение звеньев относительно корпуса 1. В относительном движении звеньев друг относительно друга изменение углов между ними передается грунтозацепу 15, который поворачивается со звеном стопы 14, занимая в опорной фазе периода оптимальное положение в грунте, чем достигается высокий коэффициент сцепления с грунтом. Увеличение тяги движителя достигается за счет "распрямления" бедра, голени и стопы в конце опорной фазы периода. Изменением на ходу положений опорных шарниров A, B и C звеньев 2, 6 и 8 можно задавать оптимальные траектории стопе в зависимости от условий движения транспортного средства (уклон, подъем ступени, тросы, расщелины и т. п.)
Экологическая чистота движителя заключается в создании им дискретной колеи цепочки отпечатков стопы след в след, минимально уплотняя почву.
Следствием применения предлагаемого движителя будет повышение урожайности полей, снижение эрозии почв, экономия топлива, возможность работы техники круглый год.
Движитель может быть применен при создании высокопроходимых транспортных средств для движения после землетрясений, обвалов, оползней, наводнений и других бедствий, а также может быть применен для средств освоения внеземных территорий.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАШУЩИЙ ДВИЖИТЕЛЬ | 1993 |
|
RU2089461C1 |
| ПРОТЕЗ НИЖНЕЙ КОНЕЧНОСТИ | 1990 |
|
RU2008853C1 |
| Кривошипно-ползунный направляющий механизм для ноги шагающего движителя | 1990 |
|
SU1751038A1 |
| Транспортное средство, в котором допускается возможность перевода движителя из дорожной конфигурации во внедорожную и наоборот | 2018 |
|
RU2734175C2 |
| Колесно-шагающий движитель транспортного средства | 2024 |
|
RU2824228C1 |
| ШАГАЮЩИЙ АППАРАТ НА ОСНОВЕ ПРЕОБРАЗОВАНИЯ ВОЗОБНОВЛЯЕМОЙ ЭНЕРГИИ В ЭНЕРГИЮ ДВИЖЕНИЯ | 2022 |
|
RU2800033C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2422317C1 |
| НОГА ШАГАЮЩЕГО АППАРАТА | 2014 |
|
RU2594316C2 |
| САМОХОДНАЯ ШАГАЮЩАЯ ТЕЛЕЖКА МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ | 2012 |
|
RU2496304C1 |
| ПРОТЕЗ БЕДРА | 1992 |
|
RU2043091C1 |
Использование: изобретение относится к шагающим транспортным средствам и, в частности, к их опорам, выполненным в виде бедра и сочлененной с ним голени. Сущность: заключается в том, что бедро, глень и стопа шагающей опоры выполнены в виде шарнирных четырехзвенников, связанных между собой через общие звенья, а опора снабжена механизмом регулирования положения стопы в процессе движения. 2 ил.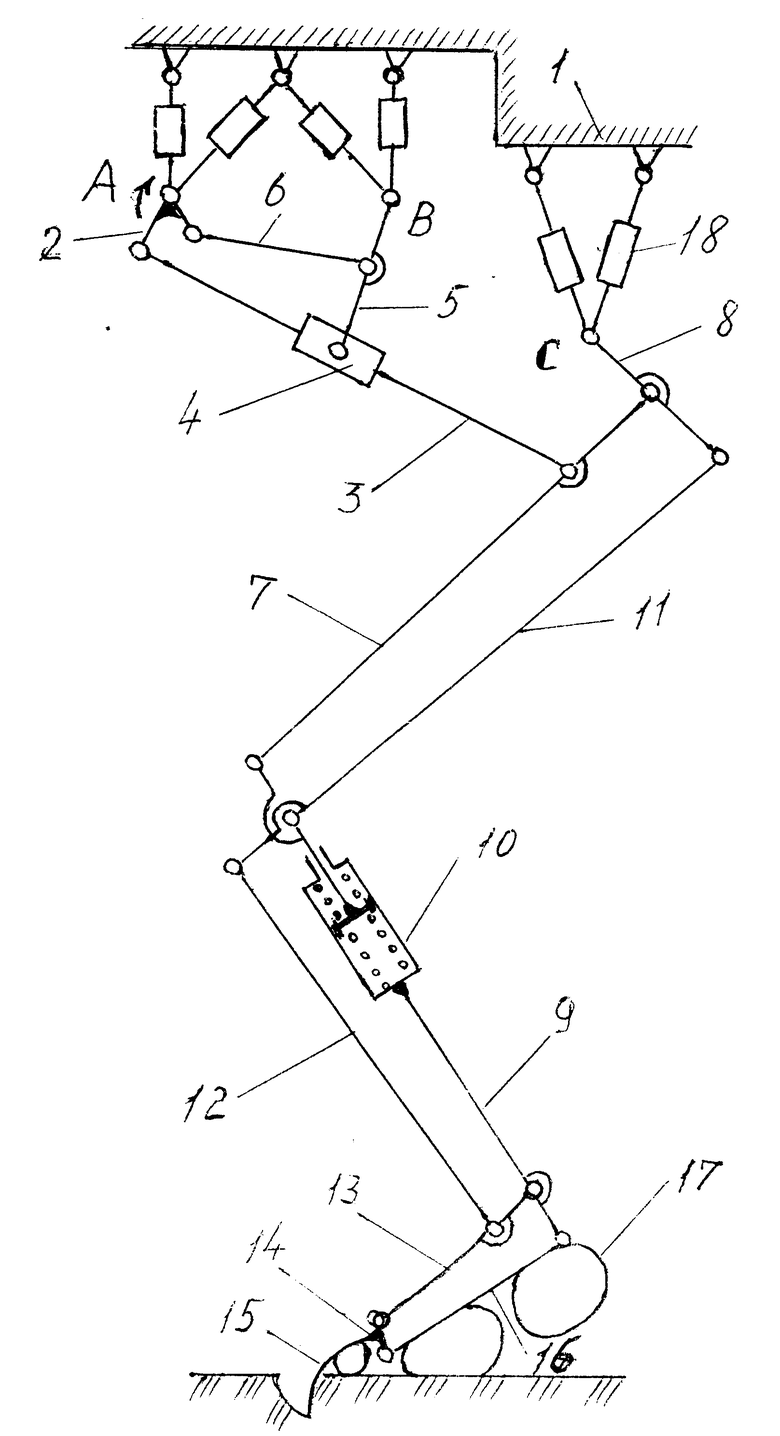
Шагающий движитель транспортного средства, имитирующий бедро, голень, выполненный в виде четырехзвенных шарнирных многоугольников, состоящих из продольных и поперечных звеньев, и опорную стопу, шарнирно связанные между собой, при этом привод на движитель выполнен в виде кривошипно-шатунного механизма, связанного шатуном с одним из звеньев бедра, закрепленного шарнирно на корпусе, а стопа является нижним поперечным звеном голени, отличающийся тем, что кривошипно-шатунный механизм шарнирно через гидроцилиндры связан с корпусом и снабжен вторым коленом кривошипа, шатун которого связан с рычагом, один конец которого шарнирно подвешен к корпусу через гидроцилиндры, а второй конец шарнирно связан с качающимся ползуном, взаимодействующим с шатуном первого колена кривошипа, верхнее продольное звено бедра также связано с корпусом шарнирно через заднее поперечное звено бедра и гидроцилиндры, одно из продольных звеньев голени снабжено встроенным в него амортизатором, а верхнее продолжение является передним поперечным звеном бедра, продолжение не связанного с приводом продольного звена бедра является верхним поперечным звеном голени, стопа выполнена в виде шарнирного четырехзвенного многоугольника, верхнее звено которого является продолжением нижнего поперечного звена голени, заднее поперечное звено является продолжением нижней части продольного звена голени, снабженного амортизатором, а переднее поперечное звено снабжено грунтозацепом.
| Устройство для перемещения и сборки цилиндрических изделий | 1989 |
|
SU1691239A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
