Изобретение относится к области измерения приращений (разностей) индукции магнитного поля (МП) с помощью трехкомпонентного дифференциального магнитометра (ТДМ).
ТДМ применяют в морской магнитометрии для измерения индукции МП корабля (МПК) и его магнитного момента (ММ) на фоне МП Земли (МПЗ). Для исключения влияния МПЗ на результаты измерений используют ТДМ со встречно включенными измерительным и компенсационным каналами.
Известен также способ минимизации погрешностей в переносном ТДМ [1. Патент РФ №2256930], где датчики измерительного и компенсационного каналов монтируют на концах жесткой штанги (базы) длиной 0.75 - 2 м. С помощью вспомогательных поворотов штанги в МПЗ контролируют и снижают результирующую погрешность такого ТДМ. Но способ [1] неприменим при измерениях на больших расстояниях между датчиками измерительного и компенсационного каналов ТДМ (десятки и сотни метров).
Для больших расстояний между датчиками ТДМ используют способ измерения приращения индукции МП ТДМ [2. Патент РФ 2313801], который включает определение корректирующей матрицы трехкомпонентного магнитометра (ТМ) [3. Патент РФ 2229727] и угловое согласование ТМ на кардановых подвесах по вертикали [4. Патент РФ 2256188]. Способ [3] позволяет из любого неортогонального ТМ просто и быстро сделать строго ортогональный в собственной ортогональной системе координат (COCK) измерительного или компенсационного канала ТДМ, если известны неортогональности осей датчика соответствующего канала. При этом способ [3] обеспечивает точное определение этих неортогональностей, а способ [4] позволяет определить угол рассогласования между COCK измерительного и COCK компенсационного канала ТДМ с датчиками на кардановых подвесах. Особенностью способа [2] является трудно контролируемая, а потому и плохо снижаемая погрешность результатов измерений из-за нестабильности уходов нулей ферро-зондовых датчиков каналов ТДМ на кардановых подвесах.
Различают магнитоизмерительные стенды (МИС) 1-го поколения (1950-70 гг.) с однокомпонентными датчиками на кардановых подвесах по вертикали; 2-го поколения (после 1970 г.), использующих 12-18 трехкомпонентных измерительных каналов и один общий компенсационный канал с датчиками на кардановых подвесах; 3-го поколения (с конца 1986 г.) с 2-4 ТМ на феррозондовых датчиках без кардановых подвесов [5. Matthews D.C. Contemporary degaussing measuring ranges. Maritime Defence 1979, v. 4, P. 499-503] [6. B.J. Marshall. Operational Aspects of Magnetic Measurement Ranges. Naval Forces 1989, v. 10, #2, Р. 72-78]. Примером стенда 3-го поколения является стенд MS90 [7. More efficient degaussing at less cost. Maritime Defence 1988, v. 13, #7]. Проблема углового согласования ТМ проявилась во всей сложности на стендах 2-го поколения [5-6], и особенно на стендах 3-го поколения [7].
Появилась также публикация о трехкомпонентном магнитометре-вариометре на основе квантового датчика [8. А.К. Вершовский, М.В. Балабас, А.Э. Иванов, В.Н. Кулясов, А.С. Пизгалев, Е.Б. Александров. Быстродействующий трехкомпонентный магнитометр-вариометр на основе цезиевого датчика. Журнал технической физики. 2006. том 76. вып. 1 С. 115-120]. У квантовых магнитометров практически нет уходов нулей, они абсолютно линейны, а их точность отсчета значительно выше, чем у феррозондовых аналогов. Позже был разработан способ углового согласования каналов ТДМ на любых датчиках (с кардановыми подвесами и без них) [9. Патент РФ 2654073].
По совокупности существенных признаков способ [2] принят в качестве ближайшего аналога предлагаемого способа.
Известный способ измерения приращения индукции МП ТДМ [2] включает определение корректирующих матриц измерительного и компенсационного каналов ТДМ в соответствующей COCK канала до установки датчиков на штатных местах, определение угла рассогласования по вертикали между COCK датчиков каналов после их установки на штатных местах и коррекцию этими определениями каждого из результатов измерений приращения индукции.
Причиной, препятствующей достижению указанного ниже технического результата при использовании известного способа является то, что он предназначен только для ТДМ с датчиками на кардановых подвесах.
Задача предлагаемого технического решения заключается в повышении точности измерения индукции МП ТДМ.
Технический результат, получаемый при осуществлении предлагаемого способа, заключается в возможности бездемонтажной поверки ТДМ с датчиками как на кардановых подвесах, так и без подвесов, то есть в расширении функциональных возможностей калибровки МИС, включая стенды 3-го поколения.
Указанный технический результат достигается тем, что заявляемый способ измерения приращения индукции магнитного поля ТДМ, включающий определение корректирующих матриц измерительного и компенсационного каналов дифференциального магнитометра в соответствующей COCK канала до установки датчиков каналов на штатных местах, определение угла рассогласования по вертикали между COCK каналов после их установки на штатных местах и коррекцию этими определениями каждого результата измерения приращения индукции, отличается тем, что определяют еще два угла рассогласования по взаимно ортогональным направлениям с вертикалью, а приращение индукции измеряют квантовыми трехкомпонентными магнитометрами.
На Фиг. 1 изображена традиционная схема измерения МПК с помощью ТДМ, где магнитный момент М - условный (упрощенный) источник МПК, МПЗ - индукция МП Земли, 1,2 - измерительный и компенсационный феррозондовые датчики ТДМ на кардановых подвесах.
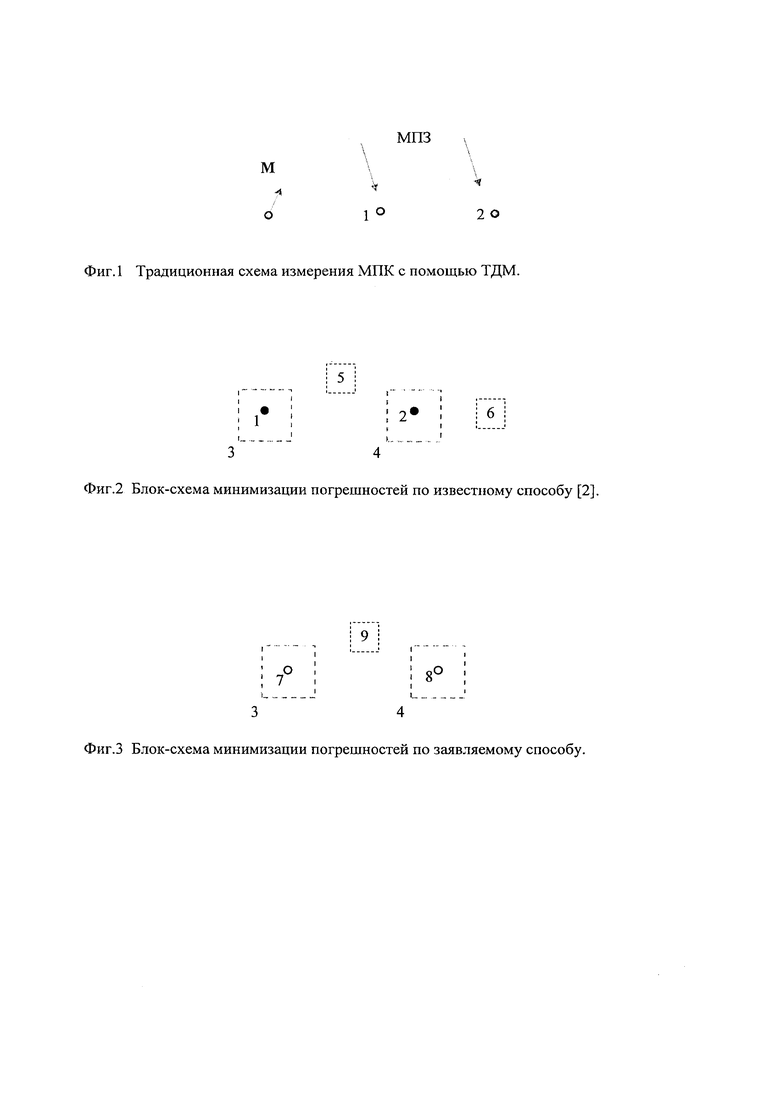
На Фиг. 2 изображена блок-схема измерения приращений индукции магнитного поля по известному способу [2], где 3 - корректирующая матрица 3×3 в COCK измерительного канала; 4 - корректирующая матрица 3×3 в COCK компенсационного канала; 5 - угол рассогласования по вертикали корректирующих матриц измерительного и компенсационного каналов ТДМ с датчиками 1 и 2; 6 - матрица 3×1 остаточной (нескорректированной) разности уходов нулей каналов ТДМ.
На Фиг. 3 изображена блок-схема заявляемого способа, где 7, 8 - квантовые измерительный и компенсационный датчики (без кардановых подвесов); 9 - матрица 3×3 углового рассогласования корректирующих матриц измерительного и компенсационного каналов с датчиками 7 и 8.
Известный способ [2] основан, прежде всего, на способе [3], с помощью которого результат измерения i-тым (i=1,2) трехкомпонентным магнитометром (Фиг. 1), исправленный на его уходы нулей, представляют как искажение действительного значения вектора индукции МП в точке i некоторой 3×3 матрицей, называемой искажающей

где (В-O)иi - вектор-столбец (3×1) результата измерения каналом i=1 или i=2, исправленный на его уходы нулей Oиi;
ui - искажающая 3×3 матрица i-го канала в его COCKi;
Bi - вектор-столбец (3×1) действительного значения МИ в точке i.
Любую искажающую матрицу выражают произведением диагональной матрицы L на матрицу единичных осей 
где Ii - единичные вектор-строки (1×3) магниточувствительных осей магнитометра.
В выражении (2) матрица L инвариантна к выбору СК, а матрица  зависит от него. Если трехкомпонентный магнитометр поместить в образцовую трехкомпонентную меру магнитной индукции, то соотношения (1) и (2) определяют все компоненты матриц L и
зависит от него. Если трехкомпонентный магнитометр поместить в образцовую трехкомпонентную меру магнитной индукции, то соотношения (1) и (2) определяют все компоненты матриц L и  . которые, в свою очередь, определяют а также неортогональности осей магнитометра
. которые, в свою очередь, определяют а также неортогональности осей магнитометра

Выберем ортогональную СК с ортами i, j, k, например, так, чтобы ось I1=i, а ось I2 легла в плоскость ортов i, j, тогда матрицу  выражают через неортогональности (3) в COCK контролируемого магнитометра следующим образом
выражают через неортогональности (3) в COCK контролируемого магнитометра следующим образом

где 
Итак, по способу [3] сначала определяют неортогональности магнитометра (3), с помощью которых ортогонализируют неортогональный магнитометр по соотношению (4), а затем корректируют его результаты измерений (1) к действительному значению

где  - обратная искажающей или корректирующая матрица i-го магнитометра в его COCK.
- обратная искажающей или корректирующая матрица i-го магнитометра в его COCK.
Также в известном способе [2] используют способ [4] для определения угла рассогласования COCK измерительного и компенсационного каналов ТДМ с датчиками 1 и 2 на кардановых подвесах по вертикали, по которому строят ортогональную матрицу

где с=cos х, s=sin x.
Здесь матрицу σ12 характеризует только один неизвестный угол х, определяемый достаточно просто по способу [4].
Погрешность измерения ТДМ при удаленном ММ источнике МПК по известному способу [2] выражается следующим соотношением

где σ21 обратная матрице σ12;
Ви1, Ви2 - матрицы 3×1 результатов синхронных измерений одного и того же МПЗ измерительным и компенсационным каналами ТДМ;
Δ012=σ21k0101 - k0202 - матрица 3×1 остаточной (нескорректированной) разности уходов нулей (поз. 6 на Фиг. 2).
Следует также отметить, что вывод (7) основан на предположении о линейности феррозондовых магнитометров. В действительности это предположение до сих пор остается непроверенным и ненадежным.
В заявляемом способе используют способ углового согласования, который пригоден и для датчиков без подвесов [9], где матрицу углового согласования σ87 определяют произведением трех матриц поворота. Например, поворотом на угол x1 вокруг орта 1, затем на угол x2 вокруг орта 2 и на угол х3 вокруг орта 3 [10. Анго. Математика для электро- и радиоинженеров. М. Наука. 1965 г. С. 187]
Итак, (8) представляет собой систему трех нелинейных уравнений относительно трех искомых углов согласования х1, х2, x3. Для решения нелинейных систем в пакете МатЛаб разработана программа "fsolve". Однако, эта программа неизменно выдавала физически неприемлемые значения углов. В этой связи был опробован упрощенный аналог (8), учитывающий близость с1, c2, с3 к единице, a s1, s2, s3 к нулю

Заменяя (8) на (9), в способе [9] и в заявляемом способе получают искомые решения по всем трем углам согласования, близким к точным значениям. По аналогии с (7) для известного способа [2], погрешность заявляемого способа можно записать в виде

Из качественного сравнения (7) и (10) видно, что погрешность (10) меньше, так как общеизвестно, что квантовые магнитометры не имеют уходов нулей, абсолютно линейны и основаны на частотной (многоразрядной) регистрации выходных значений.
Для количественного сравнения погрешностей измерений известным [2] и заявляемым способами воспользуемся результатами компьютерного моделирования (КМ) погрешностей из статьи [11. Ю.М. Иванов, А.А. Затеев и В.Г. Семенов. Повышение точности измерения магнитного момента корабля в дальнем поле. Измерительная техника (в печати 2021 г.)] в условиях схемы на Фиг. 1. При этом, учитывая, что приращение индукции МПК выполняется в целях получения информации о значении ММ (источника МПК), сравнение выполнено с оценкой относительных инструментальных погрешностей измерений ММ. Данные полученных КМ-оценок для сравниваемых методов представлены в следующей таблице.
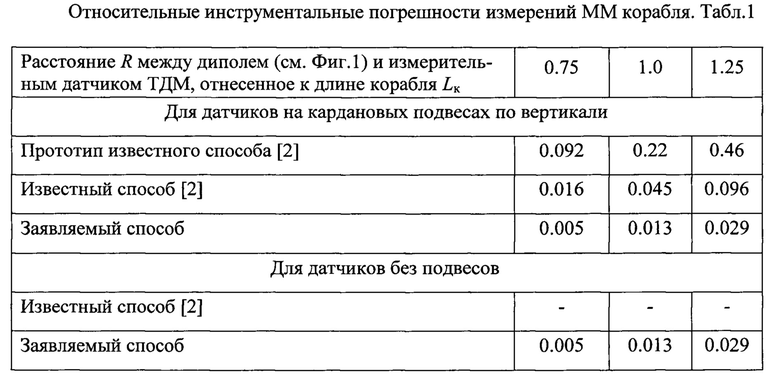
Как видно из Табл. 1, заявляемый способ пригоден для датчиков на подвесах и без них, а его инструментальные погрешности в три раза меньше, чем у известного способа [2].
Изобретение относится к области измерения магнитной индукции трехкомпонентным дифференциальным магнитометром, включающим измерительный и компенсационный каналы. Сущность изобретения заключается в том, что для каждого канала определяют корректирующую матрицу с помощью трехкомпонентной меры магнитной индукции в собственной ортогональной системе координат канала, а после установки каналов на их штатных местах определяют ортогональную матрицу углового согласования между собственными системами координат, а индукцию измеряют трехкомпонентными квантовыми измерительным и компенсационным магнитометрами, при этом результат каждого измерения исправляют упомянутыми корректирующими и ортогональной матрицей. Технический результат - возможность бездемонтажной поверки магнитоизмерительных стендов. 3 ил., 1 табл.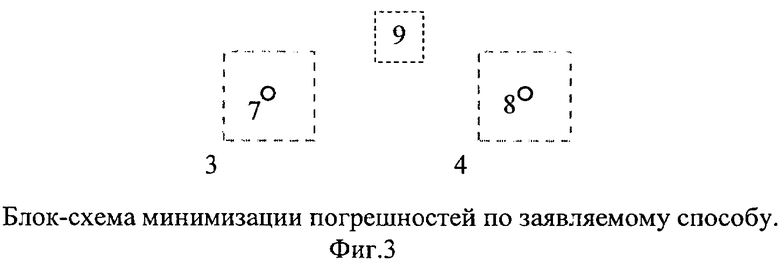
Способ измерения приращения индукции магнитного поля трехкомпонентным дифференциальным магнитометром, включающий определение корректирующих матриц измерительного и компенсационного каналов дифференциального магнитометра в соответствующей собственной ортогональной системе координат канала до установки датчиков каналов на штатных местах, определение угла рассогласования по вертикали между собственными системами координат каналов после их установки на штатных местах и коррекцию этими определениями каждого результата измерения приращения индукции, отличающийся тем, что определяют еще два угла рассогласования по взаимно ортогональным направлениям с вертикалью, а приращение индукции измеряют квантовыми трехкомпонентными магнитометрами.
| СПОСОБ ИЗМЕРЕНИЯ ПРИРАЩЕНИЯ ИНДУКЦИИ МАГНИТНОГО ПОЛЯ ТРЕХКОМПОНЕНТНЫМ ДИФФЕРЕНЦИАЛЬНЫМ МАГНИТОМЕТРОМ | 2006 |
|
RU2313801C1 |
| СПОСОБ ЛОКАЛИЗАЦИИ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ ДИПОЛЬНОЙ МОДЕЛИ | 2010 |
|
RU2433420C1 |
| Способ магнитных измерений и устройство для его осуществления | 1991 |
|
SU1824612A1 |
| WO 9311426 A1, 10.06.1993. | |||

