Изобретение относится к области измерения приращения (разности) индукции магнитного поля с помощью разнесенных в пространстве трехкомпонентных измерительного и компенсационного датчиков в составе дифференциального магнитометра.
Известен способ измерения с помощью стационарного дифференциального магнитометра [Афанасьев Ю.В. и др., Средства измерений параметров магнитного поля, Л-д, Энергия, 1979, стр.227], [Афанасьев Ю.В., Феррозондовые приборы, Л-д, Энергоатомиздат, 1986, стр.111 и 161], включающего измерительный и компенсационный каналы и датчик. Способ применялся с начала 70-х годов в морской магнитоизмерительной аппаратуре с трехкомпонентными датчиками на кардановых подвесах, например в аппаратуре МО-47/2. Однако не удалось найти ни одной ссылки в открытой печати на эту аппаратуру.
Известен также ряд патентов и заявок на изобретения, имеющих непосредственное отношение к отдельным операциям заявляемого способа:
- Патент RU 2229727. Способ определения корректирующей матрицы трехкомпонентного магнитометра;
- Патент RU 2256188. Способ углового согласования трехкомпонентных магнитометров на кардановых подвесах;
- Решение о выдаче патента RU по заявке 2005109380 (011083) Способ определения постоянных по магнитной индукции обмоток трехкомпонентного магнитометра;
Заявка на изобретение 2005125663 (028833) Способ определения местоположения и ориентации трехкомпонентного датчика магнитометра относительно меры магнитного момента.
По совокупности существенных признаков способ [Афанасьев 1986, стр.161] принят в качестве ближайшего аналога заявляемого способа.
Известный способ измерения приращения индукции магнитного поля дифференциальным трехкомпонентным магнитометром включает постоянную компенсацию магнитного поля в измерительном и компенсационном датчиках, коррекцию нулей измерительного канала при удаленном испытуемом объекте - источнике неоднородного магнитного поля и измерение разностей компонент индукций в точках расположения измерительного и компенсационного датчиков при поступательном движении испытуемого объекта на заданном расстоянии от измерительного датчика.
Причиной, препятствующей достижению указанного ниже технического результата при использовании известного способа, является то, что он не предусматривает коррекцию результатов. Об этом свидетельствует отсутствие измерительного прибора на выходе компенсационного канала в блок-схемах на всех иллюстрациях известного способа [Афанасьев, 1979, стр.227, 1986, стр.111 и 161].
Задача, на решение которой направлено заявляемое изобретение, заключается в значительном (не менее, чем на порядок) повышении точности измерения приращений индукции магнитного поля.
Технический результат, получаемый при осуществлении изобретения, заключается в том, что поставленная задача решается экономными, эффективными и универсальными средствами коррекции результатов измерения. «Универсальными» в том смысле, что способ применим и к новой (проектируемой) аппаратуре, и к модернизации старых модификаций дифференциальных магнитометров (МО-47/1 и МО-47/2).
Указанный технический результат достигается тем, что в заявляемом способе измерения приращений индукции магнитного поля трехкомпонентным дифференциальным магнитометром, включающем постоянную компенсацию магнитного поля в измерительном и компенсационном датчиках, коррекцию нулей измерительного канала, измерение разностей компонент индукций в точках расположения измерительного и компенсационного датчиков, в отличие от известного способа, в собственной ортогональной системе координат (COCK) измерительного датчика определяют его корректирующую матрицу k1 и матрицу его осей обмоток компенсации вариаций с, а в COCK компенсационного датчика находят корректирующую матрицу компенсационного датчика k2, после установки датчиков по месту работы определяют матрицу ортогонального преобразования σ из COCK компенсационного в COCK измерительного датчика и матрицу баланса дифференциального магнитометра β по формуле
β=k1·c-σ·k2,
после чего результат измерения приращений исправляют по формуле
 ,
,
где  - результат измерения, исправленный в COCK измерительного датчика, Тл;
- результат измерения, исправленный в COCK измерительного датчика, Тл;
ΔВИ - (неисправленный) результат измерения, Тл;
Δ0И - остаточный нуль измерительного канала в момент коррекции нулей, Тл;
В'2И - текущие показания на выходе компенсационного канала, Тл;
В'2И(0) - показания компенсационного канала в момент коррекции нулей, Тл,
либо по формуле

где  - результат измерения, исправленный в COCK компенсационного датчика, Тл;
- результат измерения, исправленный в COCK компенсационного датчика, Тл;
σТ - транспонированная матрица σ.
На чертеже изображена блок-схема одной компоненты дифференциального магнитометра, реализующего известный и предлагаемый способы.
Схема включает компоненту измерительного датчика 1 на входе измерительного канала 2, к выходу которого подключен регистрирующий (измерительный) прибор 3. Соответственно компонента компенсационного датчика 4 подключена на входе компенсационного канала 5, к выходу которого подключен регистрирующий прибор компенсационного канала 6. На компоненты 1 и 4 датчиков действует одинаковая регулируемая постоянная компенсация магнитного поля по цепи 7. С выхода канала 5 по цепи 8 заведена обратная связь, осуществляющая компенсацию вариаций магнитного поля в области компонент 1 и 4 датчиков. На один из входов компоненты 1 подана цепь 9 коррекции нуля измерительного канала. Пунктирная связь 11 условно означает, что в известном способе прибор 6 отсутствует, а в заявляемом способе он есть. Позиции 12 и 13 обозначают сопротивления в цепях обратной связи соответственно измерительного и компенсационного канала. Дифференциальный магнитометр состоит из измерительного (поз.1, 2, 3, 7, 8, 9, 12) и компенсационного (поз.4, 5, 6, 7, 8, 11, 13) магнитометров.
Заявляемый способ осуществляют следующим образом. Предварительно каждый из (трехкомпонентных) датчиков 1 или 4 измерительного или компенсационного магнитометра помещают в трехкомпонентную меру магнитной индукции с известными значениями остаточных неортогональностей между осями меры и достаточно точно определяют остаточные неортогональности между магниточувствительными осями магнитометра по известной методике [Патент RU 2229727]. Затем с помощью определенных неортогональностей строят собственную ортогональную систему координат (COCK) измерительного магнитометра и COCK компенсационного магнитометра и находят корректирующую матрицу (5×5) измерительного магнитометра в его COCK k1 и компенсационного магнитометра в его COCK k2 [Патент RU 2229727]. Кроме того, в COCK измерительного магнитометра определяют (также в мере магнитной индукции) искажающую матрицу (3×3) осей обмоток компенсации вариаций с измерительного датчика 1 [Решение от 23 марта 2006 г. о выдаче патента RU по заявке 2005109380 (011083)]. На чертеже вход обмотки KB обозначен позицией 8. Значения элементов матриц k1, k2 и с заносят в паспорт дифференциального магнитометра, где они хранятся до следующего этапа поверки.
После установки измерительного и компенсационного датчиков по месту работы определяют σ - матрицу ортогонального преобразования координат из компенсационной COCK в измерительную COCK. Если датчики оснащены кардановыми подвесами, обеспечивающими ориентацию одной из осей датчика вдоль вертикали, то матрицу σ определяют из результатов наблюдения поперечных (по отношению к вертикали) компонент магнитного поля Земли в COCK обоих магнитометров при отсутствии неоднородных помех [Патент RU 2256188]. Если датчики не оснащены карданами, то для определения σ используют вспомогательную трехкомпонентную меру магнитного момента (ММ), воспроизводящую известные значения магнитного момента вдоль каждой оси меры [Заявка на изобретение 2005125663 (028833) с приоритетом от 09.08.05]. Значения MM, воспроизводимые мерой, измеряют в COCK того и другого магнитометра, из сравнения результатов определения осей меры ММ тем и другим магнитометром определяют матрицу σ.
Рассмотрим исходное уравнение, составленное по блок-схеме на чертеже.
 ,
,
где ΔВИ - фактический результат измерения приборами 3, Тл;
В1 - условный результат измерения в измерительном канале, если бы не было компенсации и коррекции нуля, Тл;
ВПК1 - постоянная компенсация в измерительном датчике, Тл;
с·(В2-ВПК2) - компенсация вариаций в измерительном датчике, Тл;
с - искажающая матрица обмоток KB на измерительном датчике;
ВПК2 - постоянная компенсация в компенсационном датчике, Тл;
В2 - условный результат измерения в компенсационном канале, если бы не было компенсации, Тл.
В0 - коррекция нуля в измерительном датчике, Тл;
В'2И=В2-Bпк2 - фактический результат измерения приборами 6, Тл.
Для измерительного датчика имеем
 ,
,
где u1 - искажающая матрица измерительного датчика в его COCK;
 - действительное значение индукции в точке измерительного датчика в его COCK, Тл;
- действительное значение индукции в точке измерительного датчика в его COCK, Тл;
 - действительное значение разности индукций в точках измерительного и компенсационного датчиков в COCK измерительного датчика, Тл;
- действительное значение разности индукций в точках измерительного и компенсационного датчиков в COCK измерительного датчика, Тл;
 - действительное значение индукции в точке компенсационного датчика в COCK измерительного датчика, Тл;
- действительное значение индукции в точке компенсационного датчика в COCK измерительного датчика, Тл;
σ - матрица ортогонального преобразования координат из COCK компенсационного датчика в COCK измерительного;
 - действительное значение индукции в точке компенсационного датчика в COCK компенсационного датчика, Тл;
- действительное значение индукции в точке компенсационного датчика в COCK компенсационного датчика, Тл;
k2 - корректирующая матрица компенсационного датчика в его COCK.
Перепишем (1) с учетом (2)

Дифференциальные магнитометры используют в условиях пренебрежимо малых неоднородных переменных помех (на расстояниях 8 км и более до ближайшей линии электротяги на постоянном токе). Перед началом измерения в дифференциальном магнитометре осуществляют коррекцию нулей измерительного канала при испытуемом объекте, удаленном от измерительного датчика на достаточное расстояние. Тогда можно принять, что  Для момента коррекции нулей имеем из (3)
Для момента коррекции нулей имеем из (3)

где Δ0И - показания приборов измерительного канала в момент коррекции нулей, Тл;
В2(0), ВПК1(0), В'2И(0), В0(0) - соответствующие значения в момент коррекции нулей.
Регулируя токи цепей постоянной компенсации 7 (см. чертеж), снижают до некоторого приемлемого остаточного уровня показания приборов компенсационного канала В'2И(0). Регулируя токи цепей коррекции нулей 9 (см. чертеж) снижают до некоторого приемлемого остаточного уровня показания Δ0И. Значения остатков тщательно регистрируют. Вычитаем (4) из (3)

Измерение приращения магнитного поля объекта выполняют в течение нескольких минут. В течение малого отрезка времени можно пренебречь нестабильностью цепей постоянной компенсации 7 и коррекции нулей 9 (см. чертеж), то есть

Перепишем (5), учитывая (6),

Умножим (7) слева на корректирующую матрицу измерительного канала в его COCK  и решим относительно действительного значения измеряемого приращения
и решим относительно действительного значения измеряемого приращения

где β=(k1·с-σ·k2).
Правая часть (8) содержит результаты измерения приборами измерительного 3 и компенсационного 6 каналов, исправленные соответствующими заранее определенными матрицами. Уравнение (8) представляет собой уравнение измерения, исправленное относительно действительного значения измеряемого приращения в COCK измерительного канала. Из (8) получим аналогичное уравнение, исправленное в COCK компенсационного канала,
 ,
,
где  - действительное значение в COCK компенсационного канала;
- действительное значение в COCK компенсационного канала;
σT - транспонированная матрица σ;
σT·σ=I - единичная матрица;
σT·β=σT·k1·с-k2.
Вычитая из обеих частей (7) и (8) действительное значение  , получим выражения для статической погрешности измерения известным способом
, получим выражения для статической погрешности измерения известным способом

и заявляемым способом
 ,
,
где k'1 - неточно определенная матрица k1, как источник погрешности в заявляемом способе.
Очевидно, что для точной матрицы k1·u1=I и погрешность (11) обращается в нуль.
Соотношения (7)-(11) проверены с помощью вычислительной системы МатЛаб. В качестве иллюстрации рассчитаем погрешности (10) и (11) при следующих условиях:

Если задать магнитный момент испытуемого объекта матрицей [711188 43283 475708]Ам2, а в момент измерения радиус-вектор между центром объекта и измерительным датчиком [64 0 0]м, между центром объекта и компенсационным датчиком [64+L 0 0]м, то по заданным моменту и радиус-векторам рассчитывают величины и приращения индукций магнитного поля объекта точечной дипольной модели в точках измерительного и компенсационного датчиков. Результаты расчета модулей измеряемых величин и модулей оценок статических инструментальных погрешностей известного (10) и заявляемого способов (11) измерения приращения индукции магнитного поля в функции расстояния между измерительным и компенсационным датчиками сведены в таблицу.
Оценка погрешности известного способа |Δизв.сп.| растет во втором члене (10) от увеличения |В2| при плохом балансе дифференциального магнитометра, или при высоких значениях элементов матрицы β. Заявляемый способ исправляет плохой баланс, поэтому оценка |Δзаяв.сп.| не увеличивается с изменением L.
Приведенные в таблице точностные показатели заявляемого способа оказались в 160-2000 раз лучше показателей известного способа. Эти соотношения могли быть еще лучше или несколько хуже, в зависимости от точности определения корректирующих матриц k и матриц β. В таблице мы ограничились одним конкретным примером для иллюстрации точностных процессов.
Особо подчеркнем, что заявляемый способ, будучи применим как к точным и хорошо сбалансированным, так и к неточным и плохо сбалансированным магнитометрам, требует достаточно надежного определения искажающих матриц и матриц баланса магнитометров. В связи с ответственностью определения этих матриц, их определением должна заниматься государственная метрологическая служба, отвечающая за обеспечение единства измерений и определение метрологических (точностных) характеристик в стране.
Таким образом, заявляемый способ является простым, экономичным и универсальным, но требует централизации и привлечения метрологической службы.
Изобретение относится к области измерения разности индукции магнитного поля между измерительным и компенсационным датчиками. Способ измерения приращения индукции магнитного поля трехкомпонентным дифференциальным магнитометром заключается в том, что в собственной ортогональной системе координат (COCK) измерительного датчика определяют его корректирующую матрицу и матрицу его осей обмоток компенсации вариаций, также определяют в COCK компенсационного датчика его корректирующую матрицу, после установки датчиков по месту находят матрицу ортогонального преобразования координат из одной COCK в другую. Показания измерительного и компенсационного каналов корректируют с помощью вышеупомянутых заранее определенных матриц. Технический результат: повышение точности измерения приращений индукции магнитного поля. 1 табл., 1 ил.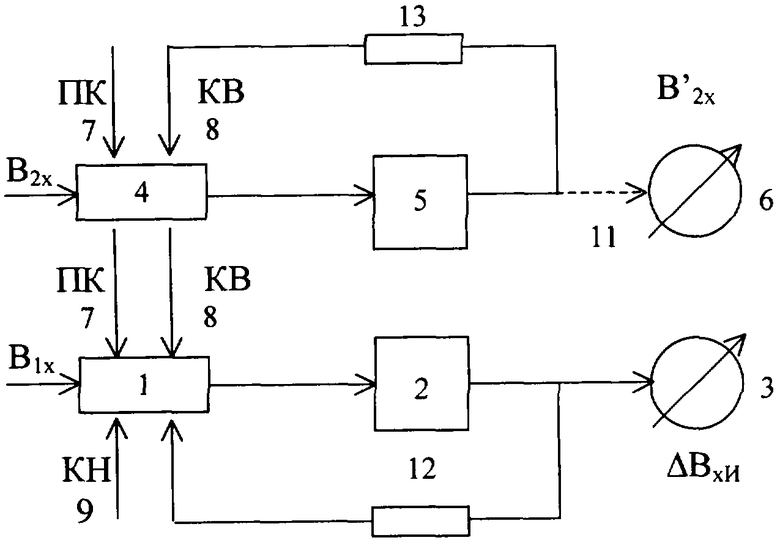
Способ измерения приращений индукции магнитного поля трехкомпонентным дифференциальным магнитометром, включающий постоянную компенсацию магнитного поля в измерительном и компенсационном датчиках, коррекцию нулей измерительного канала, измерение разностей компонент индукций в точках расположения измерительного и компенсационного датчиков, отличающийся тем, что в собственной ортогональной системе координат (COCK) измерительного датчика определяют его корректирующую матрицу k1 и матрицу его осей обмоток компенсации вариаций с, а в COCK компенсационного датчика находят корректирующую матрицу компенсационного датчика k2, после установки датчиков по месту работы определяют матрицу ортогонального преобразования σ из COCK компенсационного в COCK измерительного датчика и матрицу баланса дифференциального магнитометра β по формуле
β=k1·c-σ·k2,
после чего результат измерения приращений исправляют по формуле

где  - результат измерения, исправленный в COCK измерительного датчика, Тл;
- результат измерения, исправленный в COCK измерительного датчика, Тл;
ΔВИ - (неисправленный) результат измерения, Тл;
Δ0И - остаточный нуль измерительного канала в момент коррекции нулей, Тл;
В'2И - текущие показания на выходе компенсационного канала, Тл;
В'2И(0) - показания компенсационного канала в момент коррекции нулей, Тл,
либо по формуле

где  - результат измерения, исправленный в COCK компенсационного датчика, Тл;
- результат измерения, исправленный в COCK компенсационного датчика, Тл;
σT - транспонированная матрица σ.
| Афанасьев Ю.В | |||
| Феррозондовые приборы, Л.: Энергоатомиздат, 1986, с.161 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КОРРЕКТИРУЮЩЕЙ МАТРИЦЫ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2002 |
|
RU2229727C1 |
| СПОСОБ УГЛОВОГО СОГЛАСОВАНИЯ ТРЕХКОМПОНЕНТНЫХ МАГНИТОМЕТРОВ НА КАРДАНОВЫХ ПОДВЕСАХ | 2003 |
|
RU2256188C2 |
| US 6130534 A, 10.10.2000 | |||
| US 4109199 A, 22.08.1978. | |||

