Изобретение относится к безопасности использования робота-гуманоида.
Робот может считаться гуманоидом, если он обладает определенными признаками внешнего вида и функциональными возможностями человека: голова, тело, две руки, две кисти, две ноги и две ступни. Некоторые роботы, имеющие только верхнюю часть корпуса, тоже могут считаться гуманоидами. Встречаются роботы-гуманоиды, которые могут ходить или перемещаться на платформе, оснащенной колесами, делать жесты своими конечностями или головой. Сложность жестов, которые они могут производить, постоянно повышается.
Эти роботы предназначены для взаимодействия с людьми, поэтому необходимо избегать жестов роботов, которые могут поранить окружающих их людей. В частности, во время движения некоторых шарниров робота он может защемить пальцы находящегося вблизи человека. Например, когда плечо робота приближается к его туловищу, существует риск защемления между плечом и туловищем. В целом существует риск защемления между двумя шарнирно соединенными элементами робота.
Для снижения риска защемления или для ограничения его последствий было предложено несколько решений. Чтобы избежать любого защемления можно ограничить ход шарнира при помощи упора, позволяющего сохранять достаточный промежуток между элементами, соединенными рассматриваемым шарниром. Это решение ограничивает возможности робота, поскольку не позволяет ему совершать некоторые движения. При этом ухудшается антропоморфизм робота.
Для ограничения последствий защемления можно уменьшить усилие, производимое приводом, управляющим рассматриваемым шарниром. Это уменьшение усилия тоже снижает возможности робота, который не сможет, например, поднимать тяжелые грузы. Можно ограничить усилие привода только в конце хода, когда два элемента сближаются друг с другом. Это ограничение требует сложного управления приводом. Это управление является дорогим и может стать причиной снижения надежности робота.
Изобретение призвано повысить безопасность работы робота при помощи полностью пассивного решения, позволяющего ограничить усилие защемления в конце хода отклонения шарнира.
Для этого объектом изобретения является робот-гуманоид, содержащий два элемента и шарнир с по меньшей мере одной степенью свободы, соединяющий оба элемента, при этом оба элемента содержат, каждый, оболочку, ограничивающую их наружную поверхность, при этом шарнир обеспечивает отклонение в заданном диапазоне, при этом первый из двух элементов предназначен для вхождения по существу в контакт с зоной оболочки второго из двух элементов в конце диапазона. Зона является гибкой и может деформироваться на заданном расстоянии с усилием, меньшим заданного усилия, и первый элемент крепится на втором элементе, проходя через гибкую зону.
Гибкая зона может быть выполнена с возможностью сохранения контакта либо с шарниром, либо с первым элементом.
Робот может содержать упор, принадлежащий к одному из двух элементов. В конце диапазона другой из элементов входит в контакт с упором.
Оболочки обоих элементов в основном являются жесткими, и предпочтительно в продолжении жесткой зоны оболочки находится по меньшей мере одна гибкая зона.
Гибкая зона является прерывистой внутри замкнутой линии. Первый элемент проходит через оболочку через разрыв в гибкой зоне, и жесткая зона оболочки окружает гибкую зону вдоль всей замкнутой линии.
Изобретение и его другие преимущества будут более очевидны из нижеследующего подробного описания варианта выполнения, представленного в качестве примера, со ссылками на прилагаемые чертежи, на которых:
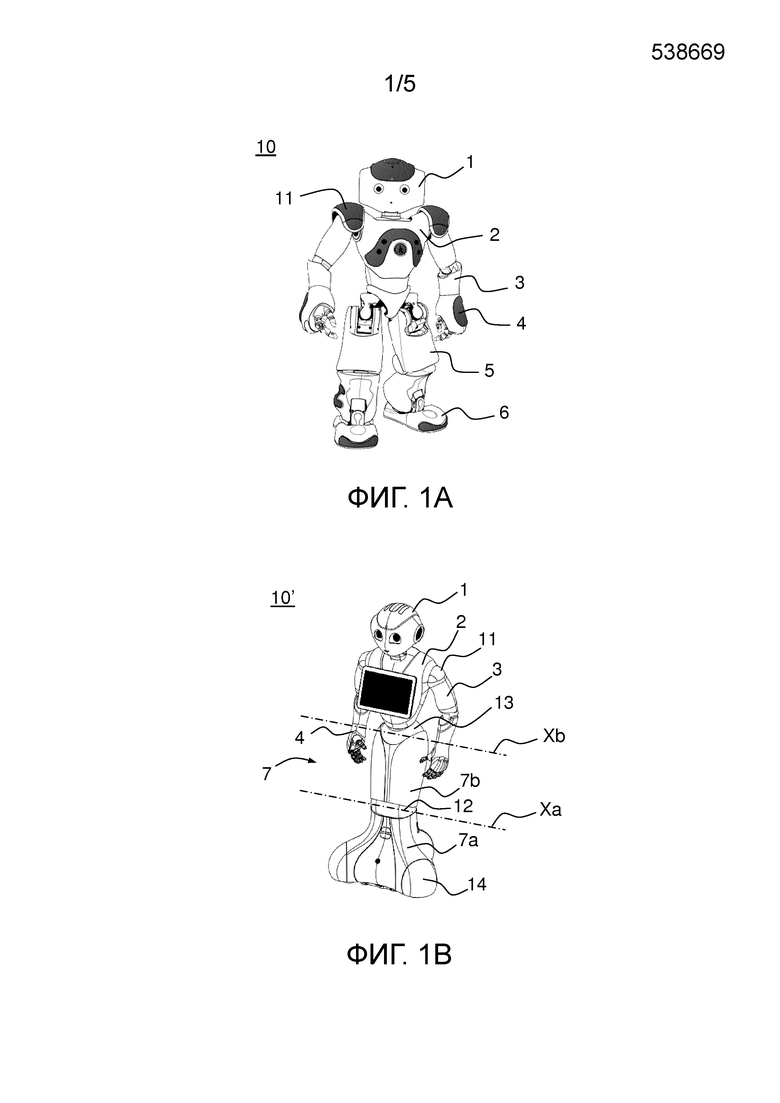
Фиг. 1а и 1b - два примера роботов, для которых можно применять изобретение.
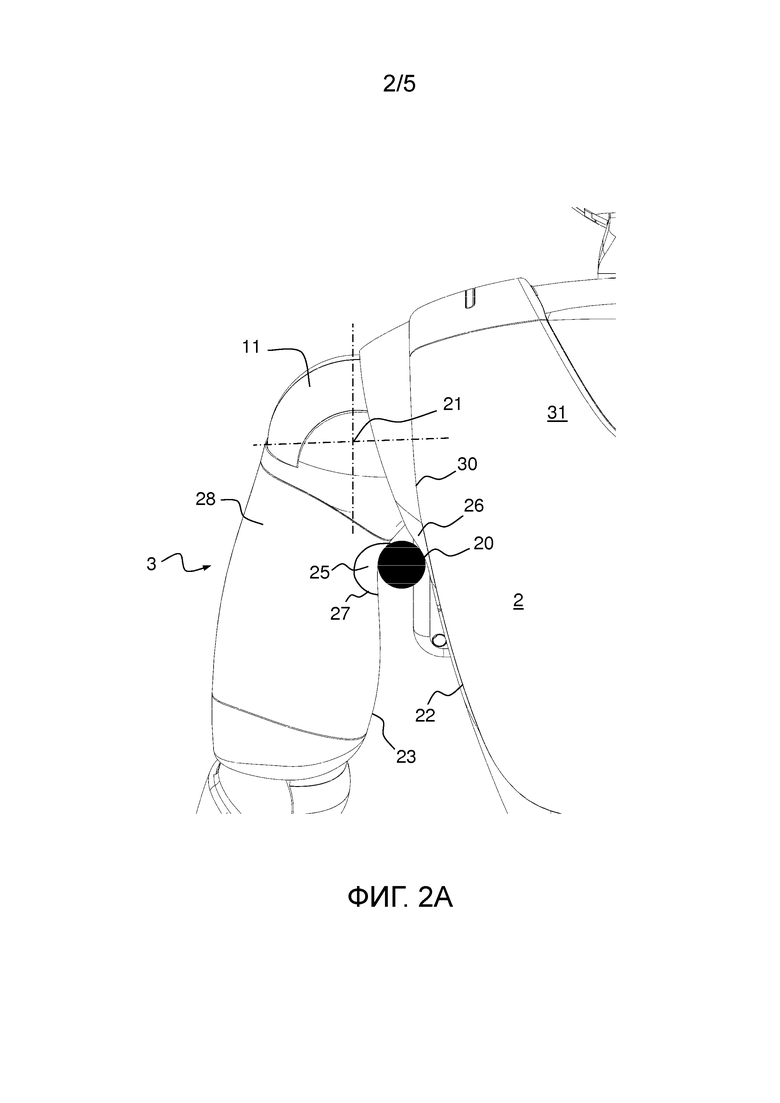
Фиг. 2а и 2b - плечевой сустав робота, показанного на фиг.1b.
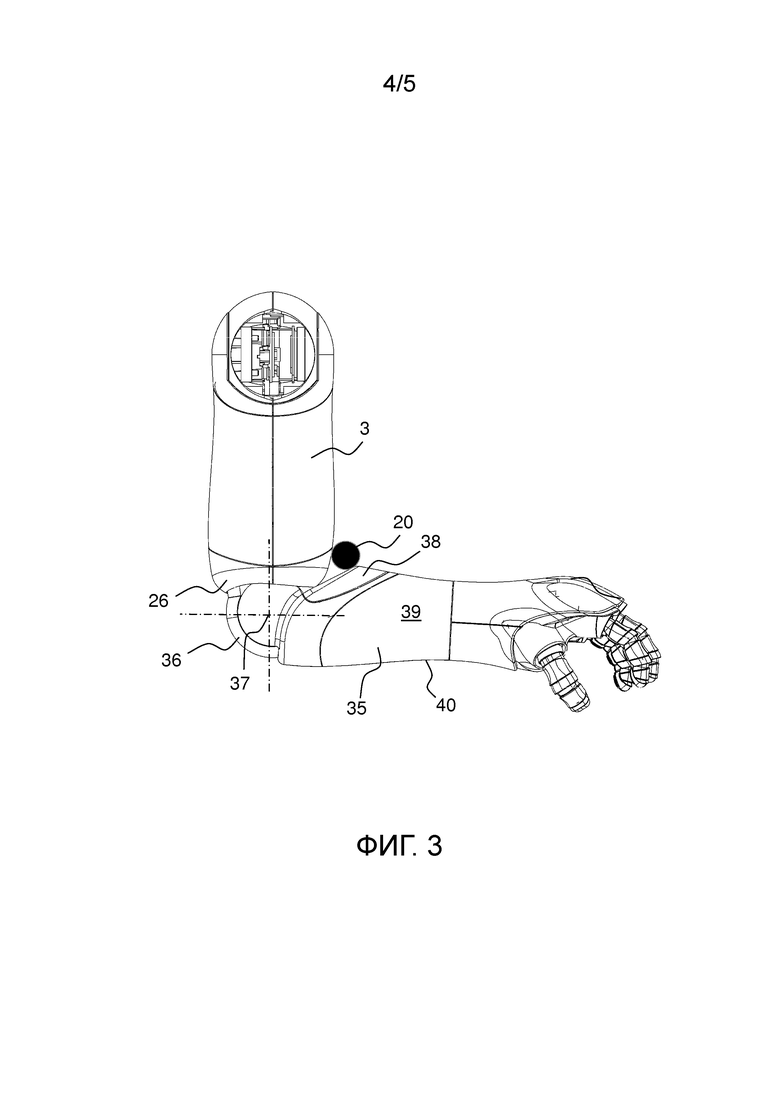
Фиг. 3 - плечо робота, показанного на фиг. 1b.
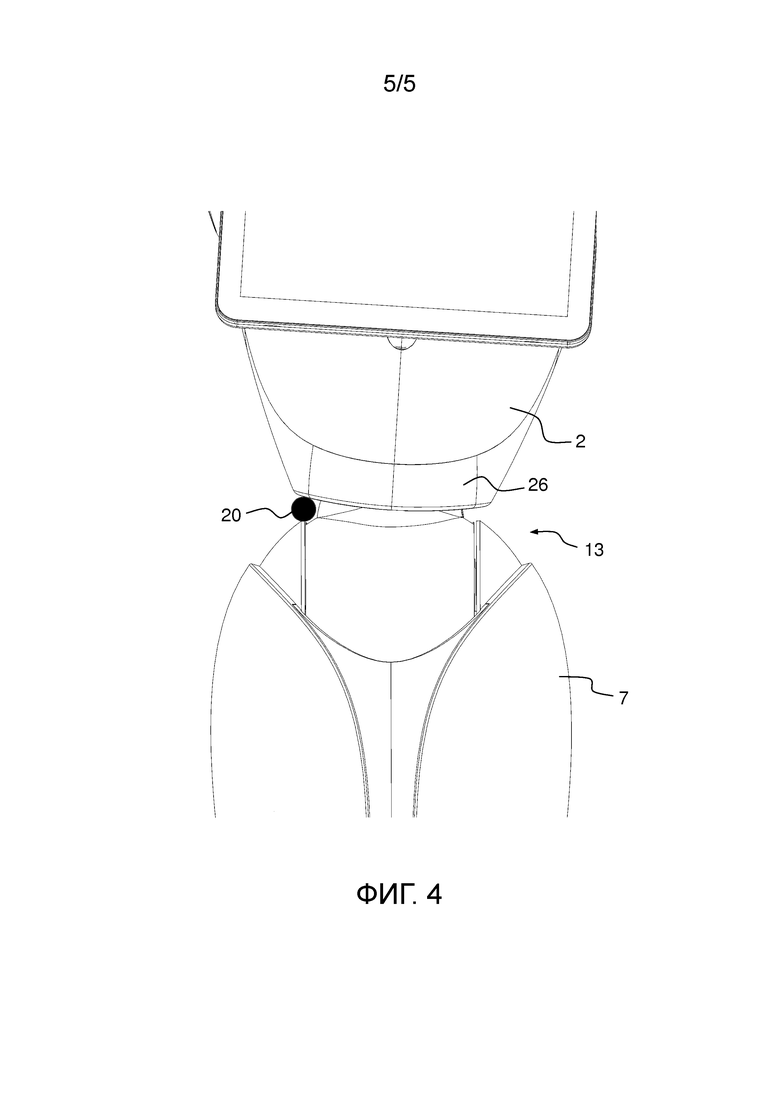
Фиг. 4 - тазобедренный сустав робота, показанного на фиг.1b.
Для большей ясности на различных фигурах одни и те же элементы имеют одинаковые обозначения.
На фиг. 1а и 1b показаны два примера роботов-гуманоидов, разработанных компанией ALDEBARAN ROBOTICSTM. Робот-гуманоид 10, показанный на фиг. 1а, содержит голову 1, туловище 2, два плеча 3, две кисти 4, две ноги 5 и две ступни 6. Робот-гуманоид 10ʹ, показанный на фиг. 1b, содержит голову 1, туловище 2, два плеча 3, две кисти 4 и юбку 7. Эти два робота содержат несколько шарниров, обеспечивающих относительное движение различных конечностей робота с целью воспроизведения морфологии человека и его движений. Роботы 10 и 10ʹ содержат, например, шарнир 11 между туловищем 2 и каждым из плеч 3. Шарнир 11, образующий плечевой сустав робота, механизирован вокруг двух осей вращения для обеспечения перемещения плеча 3 относительно туловища 2 наподобие возможных перемещений, обеспечиваемых плечевым суставом человека.
Робот-гуманоид 10 содержит также несколько шарниров для приведения в движение ног робота и воспроизведения движения ходьбы, в частности, шарниры, подобные тазобедренному суставу между туловищем и каждым из бедер, коленному суставу между бедром и ногой, и лодыжке между ногой и ступней. Можно применять различные формы механизированных шарниров, приводящих в движение одну из конечностей с одной или несколькими степенями свободы вращения.
Робот-гуманоид 10ʹ имеет другую конструкцию. Чтобы улучшить устойчивость и опустить центр тяжести робота, робот имеет не ногу, а юбку 7, содержащую в своем основании треногу 14, выполненную с возможностью перемещения робота. Юбка 7 содержит также первый шарнир 12, подобный коленному суставу, между ногой 7а и бедром 7b. Второй шарнир 13, подобный тазобедренному суставу, соединяет туловище 2 и бедро 7b. Эти два шарнира представляют собой поворотные связи, механизированные вокруг оси вращения. Ось вращения Ха шарнира 12 и ось вращения Хb шарнира 13 по существу параллельны оси, соединяющей два плечевых сустава робота, что позволяет наклонять робот вперед или назад.
На фиг. 2а и 2b более детально показан плечевой сустав 11 робота 10ʹ. На этих двух фигурах показан предмет 20 круглого сечения, отображающий человеческий палец, который может быть защемлен между туловищем 2 и плечом 3. На обеих фигурах предмет показан в разрезе. На практике предмет 20 может быть стандартным шаблоном, имитирующим человеческий палец. Этот шаблон не должен слишком сильно защемляться между двумя элементами робота. В частности, робот не должен действовать на шаблон усилием, превышающим заданное усилие.
На фиг. 2а предмет 20 расположен под плечом 3 на уровне подмышки робота 10ʹ. Плечо 3 стремится опуститься вдоль туловища 2, зажимая предмет подмышкой между плечом 3 и туловищем 2. В примере, представленном на фиг. 2а, нас интересует вращение шарнира 11 вокруг горизонтальной оси 21, перпендикулярной к фронтальной плоскости робота 10ʹ. Фронтальная плоскость расположена параллельно плоскости фиг. 2, и горизонтальная ось 21 перпендикулярна к плоскости фигуры. Шарнир 11 обеспечивает угловое отклонение в заданном диапазоне вокруг оси 21. Плечо 3 может иметь отклонение порядка 180°. Изобретение позволяет ограничить эффект защемления предмета 20, когда плечо 3 приходит к концу хода в конце диапазона, то есть когда плечо 3 расположено вдоль туловища 2. Разумеется, изобретение можно также применять для другого конца диапазона вращения вокруг оси 21, что будет описано ниже со ссылками на фиг. 2b для вращения вокруг другой оси вращения шарнира 11 вокруг вертикальной оси и, в целом, для любого комбинированного движения двух вращений шарнира 11.
Наружная поверхность туловища 2 и плеча 3 образует оболочку, соответственно 22 и 23. В конце хода, когда плечо 3 расположено вдоль туловища 2, оболочка 23 плеча 3 и оболочка 22 туловища 2 по существу входят друг с другом в контакт. В частности, для каждой оболочки существует зона, в которой промежуток между двумя оболочками меньше сечения предмета 20. Эта зона имеет обозначение 25 для оболочки 23 плеча 3 и обозначение 26 для оболочки 22 туловища 2. Согласно изобретению, одна из зон 25,26 или обе зоны 25,26, предназначенные для вхождения друг с другом в контакт, являются гибкими, что обеспечивает их деформацию на заданном расстоянии с усилием, меньшим заданного усилия. Заданным расстоянием является сечение предмета 20. Например, заданное расстояние равно примерно 5 мм, что соответствует диаметру пальца ребенка. Заданное усилие представляет собой максимальное усилие, допустимое во время защемления предмета 20.
Деформация зоны или зон 25,26 рассматриваемой оболочки происходит в их соответствующей области упругости, чтобы они могли восстанавливать свою первоначальную форму, когда плечо 3 покидает свое положение конца хода относительно туловища 2. В отсутствие предмета 20 между зонами 25 и 26 оболочек 22 и 23 может оставаться небольшой зазор, и может происходить контакт без усилия или даже легкое давление между зонами 25 и 26.
Наличие этих гибких зон 25 и 26 позволяет роботу больше приблизиться к человеческой морфологии. Гибкие зоны 25 и 26 могут быть выполнены в виде мембран из эластомерного материала, например, на основе силикона или резины.
Конец хода шарнира 11 можно зафиксировать путем управления приводом, обеспечивающим движение шарнира 11, или при помощи механического упора, расположенного внутри шарнира 11.
В представленном примере гибкая зона 25 является сплошной внутри ограничивающей ее замкнутой линии 27. Жесткая зона 28 оболочки 23 окружает гибкую зону 25 вдоль всей замкнутой линии 27. Для плеча 3 оболочка в основном является жесткой. На оболочке 23 расположена одна или несколько гибких зон 25. Эти зоны 23 находятся в местах, где плечо 3 может по существу входить в контакт с другим элементом робота 10ʹ, в данном случае с туловищем 2.
Гибкая зона 26 туловища 2 является прерывистой внутри ограничивающей ее замкнутой линии 30. Плечо 3 проходит через оболочку 22 туловища через разрыв гибкой зоны 26. Жесткая зона 31 оболочки 22 окружает гибкую зону 26 вдоль всей замкнутой линии 30. Иначе говоря, как и в случае плеча 3, оболочка 22 туловища 2 в основной является жесткой. Гибкая зона 26 закреплена на жесткой зоне 31 вдоль замкнутой линии 30. Гибкая зона 26 образует юбку, закрепленную на жесткой зоне 22 и окружающей крепление плеча 3 на туловище 2. Полностью окружая плечо 3, гибкая зона 26 позволяет плечу 3 приближаться к туловищу 2 во всех комбинациях вращения шарнира 11. Кроме того, благодаря своей форме в виде юбки, гибкая зона 26 позволяет ограничить проникновение нежелательных предметов внутрь шарнира 11. Для этого гибкая зона 26 выполнена с возможностью оставаться в контакте с креплением плеча 2 на туловище 2. Гибкая зона 26 может оставаться в контакте либо с шарниром 11, либо с плечом 2. В частности, гибкая зона 26 позволяет предохранить шарнир 11 от окружающей пыли. Гибкая зона 26 позволяет также изолировать возможные дефекты, которые могут возникнуть внутри робота. Например, речь может идти о возгорании, связанном с электрическим дефектом, или о задержании возможных сломанных механических деталей внутри робота.
На фиг. 2b показано плечо 3, проходящее по существу вертикально вверх. Плечо 3 находится в конце хода своего вращения вокруг оси 21 в конце своего диапазона вращения, противоположному концу, показанному на фиг. 2а. Жесткая зона 28 оболочки 23 плеча 3 слегка вдавливается в гибкую зону 26 оболочки 22 туловища 2. Это вдавливание видно на уровне стрелки 32. На этой фигуре показан предмет 20, защемленный между плечевым суставом и плечом 3. Для ограничения последствий защемления предмета 20 плечо 3 может содержать вторую гибкую зону 25. На уровне туловища 2 предмет 20 вдавливается в гибкую зону 26 туловища 2.
В целом, туловище 2 и/или плечо 3 имеют необходимое количество гибких зон, находящихся в соответствующих местах, где оболочки этих двух элементов (туловища 2 и плеча 3) могут сближаться или даже соприкасаться во время различных движений плеча 3 относительно туловища 2. Оболочка плеча 3 и туловища 2 на большей части является жесткой. Выполненные в них гибкие зоны 25,26 расположены в продолжении жестких зон, соответственно 28 и 31.
На фиг. 3 показано плечо 3, соединенное с предплечьем 35 робота 10ʹ. Локтевой сустав 36, обеспечивающий подвижность во вращении вокруг оси 37, перпендикулярной к плоскости фиг. 3, соединяет плечо 3 и предплечье 35. На плече 3 находится гибкая зона 26 в виде юбки, через которую проходит локтевой сустав 36. На предплечье 35 гибкая зона 38 продолжает жесткую зону 39 оболочки 40 предплечья 35. Гибкая зона 38 может полностью окружать предплечье 35 и следовать его замкнутой линии. В альтернативном варианте гибкая зона 38 может только частично следовать замкнутой линии, ограничивающей жесткую зону 39. При этом гибкая зона 38 имеет форму кромки, расположенной на уровне, где предплечье 35 ближе всего приближается к плечу 3 во время вращения локтевого сустава 36 в первом направлении вращения. При вращении в направлении, противоположном первому направлению, предплечье 35 располагается по существу на одной линии с плечом 3. Сзади локтевого сустава 36 можно обойтись без гибкой зоны на предплечье 35. Гибкой зоны 26 плеча 3 может быть достаточно, чтобы избегать любого повреждения по причине защемления. Предпочтительно можно предусмотреть, чтобы гибкая зона полностью окружала локтевой сустав 36, даже если локтевой сустав 36 имеет только одну степень свободы во вращении. Часть гибкой зоны 26 не имеет функции защиты от защемления, но сохраняет свои функции защиты от посторонних предметов и изоляции дефектов внутри робота.
На фиг. 4 более детально показан тазобедренный сустав 13 робота 10ʹ. Тазобедренный сустав 13 может иметь одну или две степени свободы между туловищем 2 и юбкой 7. Можно предусмотреть конфигурацию, сходную с тазобедренным суставом в роботе 10, имеющем две ноги. Например, диапазон углового отклонения тазобедренного сустава 13 меньше 90°. При таком угловом отклонении может быть достаточно гибкой зоны на оболочке одного из элементов робота, соединенного тазобедренным суставом. В представленном примере зона 26 образует нижнюю часть туловища 2. Как и в случае плечевого сустава 11 или локтевого сустава 36 зона 26 в данном случае охватывает туловище 2, делая оборот вокруг его вертикальной оси.

Изобретение относится роботу-гуманоиду, который содержит два элемента (2,3,7,35) и шарнир (11,13,36) с по меньшей мере одной степенью свободы, соединяющий оба элемента. При этом оба элемента содержат, каждый, оболочку (22,23,40), ограничивающую их наружную поверхность. Шарнир (11,13,36) обеспечивает отклонение в заданном диапазоне. Первый из двух элементов (2,3,7,35) предназначен для вхождения по существу в контакт с зоной (25,26,38) оболочки (22,23,40) второго из двух элементов в конце диапазона. Причем первый элемент (3,7,35) соединен со вторым элементом (2,3) с возможностью деформации упомянутой зоны (25,26,38), выполненной гибкой, на заданное расстояние с усилием, меньшим максимально допустимого усилия во время защемления постороннего предмета упомянутыми элементами. Изобретение направлено на повышение безопасности использования робота-гуманоида. 3 з.п. ф-лы, 5 ил.

1. Робот-гуманоид, содержащий два элемента (2,3,7,35) и шарнир (11,13,36) с по меньшей мере одной степенью свободы, соединяющий оба элемента, при этом оба элемента содержат, каждый, оболочку (22,23,40), ограничивающую их наружную поверхность, при этом шарнир (11,13,36) обеспечивает отклонение в заданном диапазоне, при этом первый из двух элементов (2,3,7,35) предназначен для вхождения по существу в контакт с зоной (25,26,38) оболочки (22,23,40) второго из двух элементов в конце диапазона, отличающийся тем, что первый элемент (3,7,35) соединен со вторым элементом (2,3) с возможностью деформации упомянутой зоны (25,26,38), выполненной гибкой, на заданное расстояние с усилием, меньшим максимально допустимого усилия во время защемления постороннего предмета упомянутыми элементами.
2. Робот по п. 1, отличающийся тем, что гибкая зона (26) выполнена с возможностью сохранения контакта либо с шарниром (11,13,36), либо с первым элементом (3,7,35).
3. Робот по п. 1 или 2, отличающийся тем, что содержит упор, принадлежащий к одному из двух элементов (2,3,7,35), при этом в конце диапазона другой из элементов (2,3,7,35) входит в контакт с упором.
4. Робот по любому из пп. 1-3, отличающийся тем, что оболочки (22,23,40) обоих элементов (2,3,7,35) в основном являются жесткими, и в продолжении жесткой зоны (28,31,39) оболочки (22,23,40) находится по меньшей мере одна гибкая зона (25,26,38).
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| US 2011067521 A1, 24.03.2011 | |||
| US 2004236469 A1, 25.11.2004 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| ШАГАЮЩИЙ РОБОТ | 2001 |
|
RU2251480C2 |

