Изобретение относится к автоматическому управлению, в частности к устройствам идентификации параметров нелинейных инерционных объектов, и может быть применено в системах контроля, идентификации в реальном масштабе времени, в том числе и для адаптации к внешним условиям в процессе зарядки аккумуляторов.
В реальных условиях безопасная быстрая зарядка никель-кадмиевых и никель-металлгидридных аккумуляторов имеет широкий диапазон параметров, которые зависят от многих факторов (температура, флуктуации напряжения питающей электрической сети, индустриальные помехи в измерительных цепях и т.д.). (Статья "Интеллектуальное" зарядное устройство для Ni-Cd аккумуляторов. "Радио", №1, 2001 г., с.72). Идентификация параметров (ток зарядки и напряжение на аккумуляторе) с помощью специализированного процессора, включающего в себя аналого-цифровой преобразователь (АЦП), позволяет адекватно определить момент окончания оптимальной зарядки. К недостаткам этого устройства можно отнести необходимость перепрограммирования оптимального периода контроля, отключение аккумулятора от схемы зарядки в момент измерения второго параметра. Это существенно снижает быстродействие процесса адаптации. Процесс зарядки аккумуляторов в промышленных условиях подвергается различным индустриальным помехам. Постоянное воздействие на схему зарядного устройства разнообразных случайных помех, в том числе импульсного типа, снижает точность схемы контроля момента прекращения зарядки аккумулятора.
Известно устройство идентификации параметров нелинейного объекта в режиме, близком к оптимальному, в котором отсутствует необходимость использования специализированного вычислительного устройства и перепрограммирования его в ручном режиме (а.с. СССР №930266, G 05 B 23/02, 23.05.82). Оно позволяет в реальном масштабе времени идентифицировать комплексные параметры исследуемого объекта, например постоянную времени Тi=Ri*Сi с учетом нелинейности характеристик контролируемого объекта, и повышает точность определения в общем случае нестационарного параметра Ti(t). Недостатками этого устройства являются необходимость возбуждения исследуемого объекта специально сформированным симметричным пробным сигналом и низкая помехоустойчивость аналогового апериодического фильтра, используемого для непрерывного формирования коэффициентов алгебраического уравнения.
Наиболее близко к предлагаемому устройство идентификации постоянной времени нелинейного объекта (а.с. СССР №991377, G 05 B 23/02, 23.01.83), которое обеспечивает возможность непрерывного контроля и измерения комплексного параметра Ti(t) в режиме нормальной эксплуатации при случайном входном сигнале. Оно содержит первый и второй блоки формирования коэффициентов, первый и второй блоки умножения, счетчик, первый и второй интеграторы, формирователь управляющего воздействия, блок деления и блок регистрации, причем выходы первого блока формирования коэффициентов подключены соответственно к первым входам первого и второго блоков умножения, выходы которых соединены с входами соответствующих интеграторов, а выходы интеграторов - с входами блока деления, выход которого подключен к входу блока регистрации, первый выход второго блока формирования коэффициентов подключен к входу формирователя управляющего воздействия, выход которого соединен с входом счетчика.
Недостатком этого устройства остается низкая помехоустойчивость, особенно к помехам импульсного типа, что снижает точность оценки момента окончания зарядки аккумуляторов, а также необходимость периодической коррекции параметров аналоговых апериодических фильтров, используемых в качестве блоков непрерывного формирования коэффициентов алгебраических уравнений относительно неизвестных комплексных параметров технологии заряда аккумуляторов.
Настоящее изобретение предусматривает получение технического результата, состоящего в повышении точности и помехоустойчивости идентификатора.
Сущность изобретения заключается в том, что в устройство идентификации, содержащее первый и второй блоки формирования коэффициентов, первый и второй блоки умножения, счетчик, первый и второй интеграторы, формирователь управляющего воздействия, блок деления и блок регистрации, причем выходы первого блока формирования коэффициентов подключены соответственно к первым входам первого и второго блоков умножения, выходы которых соединены с входами соответствующих интеграторов, а выходы интеграторов - с входами блока деления, выход которого подключен к входу блока регистрации, первый выход второго блока формирования коэффициентов подключен к входу формирователя управляющего воздействия, выход которого соединен с входом счетчика, введены первый и второй аналого-цифровой преобразователь и буфер, причем входы первого и второго аналого-цифрового преобразователя служат входами устройства, а выходы соединены с соответствующими блоками формирования коэффициентов, выполненными в форме цифровых БИХ-фильтров, второй выход второго блока формирования коэффициентов подключен к первому входу буфера, второй вход которого соединен с выходом счетчика, а выход буфера - со вторыми входами первого и второго блоков умножения, и все остальные блоки устройства выполнены цифровыми.
На чертеже представлена схема устройства. Оно содержит аналого-цифровые преобразователи 1 и 2, входы которых служат соответствующими входами Y(t) и X(t) устройства, блоки 3 и 4 формирования коэффициентов алгебраических уравнений относительно неизвестных нестационарных комплексов параметров аккумулятора в технологическом процессе ускоренной зарядки, выполненные в форме цифровых БИХ-фильтров по схеме конвейерного типа, первый и второй блоки умножения 5 и 6, первый и второй интегратор 7 и 8, блок деления 9, блок регистрации 10, формирователь управляющего воздействия 11, счетчик 12 и буфер 13.
При этом входной сигнал X(t) контролируемого объекта (схемы заряда аккумулятора) пропорционален напряжению [U3(t)+Un(t)], где Un(t) - помехи сети переменного тока, Y(t) - выходной контролируемый сигнал объекта, пропорциональный току в зарядной цепи. Величина Lэ(t) - двоичный код числа, пропорционального эталонному напряжению. Устройство работает следующим образом.
Контролируемые входной X(t) и выходной Y(t) аналоговые случайные сигналы в режиме нормальной эксплуатации (зарядка аккумулятора) объекта без возбуждения специальным пробным сигналом подаются на входы АЦП 1 и 2, выходы которых соединены в параллельном коде с соответствующими первым и вторым входами цифровых БИХ-фильтров 3 и 4, которые используются для дискретного формирования коэффициентов.
Второй блок 4 формирования коэффициентов вырабатывает сигнал U0(ti) и C0(ti)=dU0(ti)/dti, а первый блок 3 формирования коэффициентов вырабатывает сигналы C0(ti) и C1(ti)=dCo(ti)/d ti.
При определенных параметрах блоков 3 и 4 формирования коэффициентов сигналы U0(ti) и U1(ti) практически совпадают с контролируемыми сигналами объекта X(ti) и Y(ti) соответственно.
Полученные сигналы позволяют преобразовать нелинейное дифференциальное уравнение, описывающее объект
Tj*dy/dt+y(t)=Fj[x(t)], (1)
где х (t) - входной случайный сигнал;
у(t) - выходной сигнал;
Тj=Rj*Сj - постоянная времени, [с];
Rj и Cj - сопротивление и емкость в цепи заряда аккумулятора;
Fj - однозначная непрерывная нелинейная функция, к следующему виду:
Tj*C1(t1)+C0(ti)=Fj[U0(ti)]. (2)
Сигналы Ci(ti) и U0(ti) дополнительно модулируются путем умножения на сигнал U1(ti), пропорциональный первой производной входного случайного сигнала X(ti), и интегрируется на интервале времени от ti до ti+1, причем в эти моменты времени сигнал U0(ti) проходит через эталонный уровень Uэ(ti), что фиксируется формирователем 11 управляющего воздействия, на раздельные входы которого подаются сигналы U0(ti) и -Uэ(ti), а выход соединен с входом счетчика, регистрирующего N таких переходов, изменения знака функции Sign [U0(ti)-Uэ(ti)].
Буфер 13 открывается и закрывается сигналом с выхода счетчика 12. Правая часть уравнения (2) в этом случае обращается в ноль, поэтому можно сразу определить комплексный параметр зарядки аккумулятора, постоянную времени Tj(ti), которая характеризует инерционность объекта.
Сигналы с выходов цифровых интеграторов 7, 8 подаются на блок деления 9 и в момент ti+1, когда [U0(ti)-Uэ(ti)]=0 или проходит через ноль, либо N раз подобным моментам на выходе блока деления регистрируется значение постоянной времени Tj(ti) с учетом нелинейных характеристик объекта.
Предложенный цифровой идентификатор позволяет без дополнительной перенастройки блоков формирования коэффициентов, блоков умножения, интеграторов и блока деления в процессе нормальной эксплуатации при случайном входном сигнале с высокой точностью определять параметры зарядки аккумулятора в присутствии индустриальных помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ АДАПТИВНОЙ КОРРЕКЦИИ КВАДРАТУРНЫХ ДЕМОДУЛЯТОРОВ | 2000 |
|
RU2187140C2 |
| ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТРАНСПОРТНОГО ЗАПАЗДЫВАНИЯ СИГНАЛА В ТЕХНОЛОГИИ И ТЕХНИКЕ СВЯЗИ | 2003 |
|
RU2258938C2 |
| Способ аналого-цифрового преобразования и устройство для его осуществления | 1986 |
|
SU1473083A1 |
| Устройство идентификации постоянной времени нелинейного объекта | 1981 |
|
SU991377A1 |
| Корреляционное устройство для определения импульсной переходной функции объекта | 1982 |
|
SU1096665A1 |
| Устройство для контроля аналоговых объектов | 1989 |
|
SU1718189A1 |
| СПОСОБ ИНДЕНТИФИКАЦИИ ТОНАЛЬНЫХ СИГНАЛОВ В СЕТЯХ СВЯЗИ И ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2291405C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ АНАЛОГОВЫХ ОБЪЕКТОВ | 2004 |
|
RU2262128C1 |
| Адаптивная система автоматического управления для нестационарных объектов с запаздыванием | 1986 |
|
SU1451644A1 |
| Аналого-цифровой преобразователь совмещенного интегрирования | 1989 |
|
SU1695503A1 |
Изобретение относится к автоматическому управлению, в частности к устройствам идентификации параметров нелинейных инерционных объектов. Технический результат заключается в повышении точности и помехоустойчивости идентификатора. Идентификатор содержит первый и второй аналого-цифровые преобразователи, первый и второй блоки формирования коэффициентов, первый и второй блоки умножения, счетчик, первый и второй интеграторы, формирователь управляющего воздействия, блок деления, буфер и блок регистрации, причем блоки формирования коэффициентов выполнены в форме цифровых БИХ-фильтров, и все остальные блоки устройства выполнены цифровыми. 1 ил.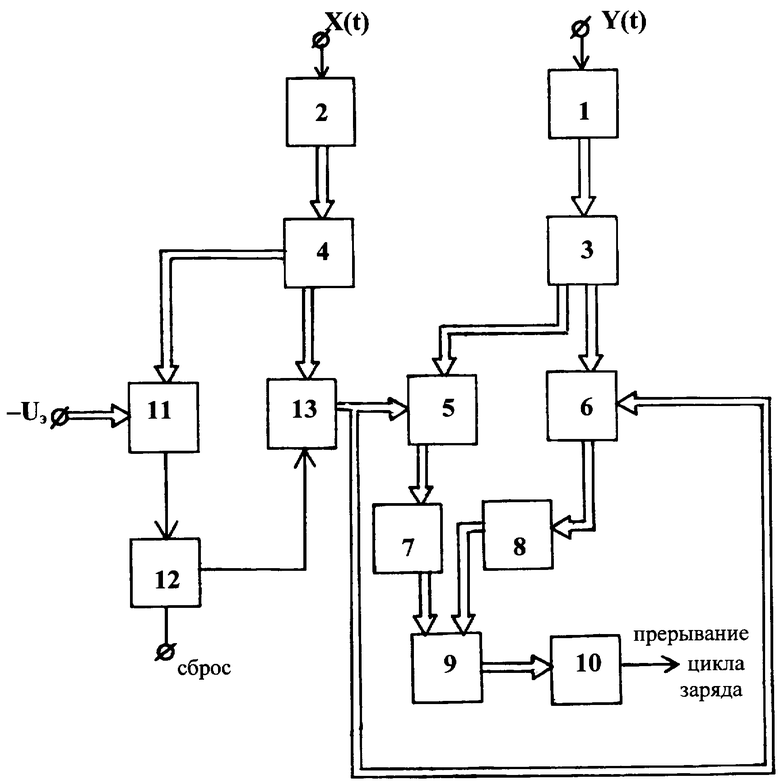
Цифровой идентификатор параметров зарядки аккумуляторов, содержащий первый и второй блоки формирования коэффициентов, первый и второй блоки умножения, счетчик, первый и второй интеграторы, формирователь управляющего воздействия, блок деления и блок регистрации, причем выходы первого блока формирования коэффициентов подключены соответственно к первым входам первого и второго блоков умножения, выходы которых соединены с входами соответствующих интеграторов, а выходы интеграторов - с входами блока деления, выход которого подключен к входу блока регистрации, первый выход второго блока формирования коэффициентов подключен к входу формирователя управляющего воздействия, выход которого соединен с входом счетчика, отличающееся тем, что оно содержит первый и второй аналого-цифровые преобразователи и буфер, причем входы первого и второго аналого-цифровых преобразователей служат входами устройства, а выходы соединены с соответствующими блоками формирования коэффициентов, выполненными в форме цифровых БИХ-фильтров, второй выход второго блока формирования коэффициентов подключен к первому входу буфера, второй вход которого соединен с выходом счетчика, а выход буфера - со вторыми входами первого и второго блоков умножения и все остальные блоки устройства выполнены цифровыми.
| Устройство идентификации постоянной времени нелинейного объекта | 1981 |
|
SU991377A1 |
| Устройство для определения постоянной времени нелинейных инерционных объектов | 1978 |
|
SU930266A1 |
| RU 94040714 А, 27.05.1996 | |||
| US 6426571 B1, 30.07.2002 | |||
| US 6433511 B1, 13.08.2002. | |||

