Изобретение относится к транспортным средствам, в частности к системам наблюдения для военных транспортных средств.
Известны военные гусеничные машины ГМ-575 (1) и ГМ-568 (2), содержащие корпус с размещенным впереди отделением управления, у которых система наблюдения водителя включает смотровые перископические приборы, смотровое окно, выполненное на крышке посадочного люка, размещенного на наклонном лобовом листе корпуса машины, и закрытое броневой крышкой. Таким образом водитель имеет возможность наблюдать за местностью впереди машины через посадочный люк при открытой крышке, через смотровое окно при закрытой крышке посадочного люка или через перископические смотровые приборы. Основной недостаток такой конструкции ограниченный сектор наблюдения впереди и отсутствие возможности наблюдения за местностью за кормой машины.
Известны устройства получения изображения заднего вида для транспортного средства (3, 4, 5), содержащие видеокамеру с монитором, расположенным перед водителем. Устройство формирует на дисплее монитора изображение заднего вида и дополнительную информацию о положении транспортного средства на местности.
Наиболее близкой к заявляемой является система наблюдения для военного транспортного средства (6), содержащая корпус транспортного средства с отделением управления впереди и средним отделением с вращающейся частью, на корпусе у переднего края установлена видеокамера с возможностью поворота в двух направлениях пространственных координат и управляемая водителем. Перед водителем установлен монитор, соединенный через блок управления с видеокамерой. На вращающейся части установлены еще две видеокамеры для командира и стрелка.
Недостатком известной системы является отсутствие возможности наблюдения водителем за обстановкой на местности за кормовой частью машины.
Целью настоящего изобретения является создание системы наблюдения для водителя военного транспортного средства, обеспечивающей возможность наблюдения за местностью впереди и сзади машины.
Для достижения указанной цели в военном транспортном средстве, содержащем корпус с отделением управления и посадочным люком с крышкой на лобовом листе, движитель, две видеокамеры, одна из которых установлена в передней части корпуса с возможностью поворота в вертикальной и горизонтальной плоскостях, соединенных через электронный блок управления с монитором, установленным в отделении управления перед водителем, передняя видеокамера установлена снаружи на крышке посадочного люка, а монитор установлен на внутренней поверхности крышки люка с возможностью поворота в вертикальной плоскости и фиксации в любом заданном положении, другая видеокамера ориентирована на обзор заднего вида и установлена в кожухе с автоматически управляемой заслонкой, закрепленном на кормовом части корпуса, при этом электронный блок управления дополнительно соединен с датчиками скорости левого и правого движителей и датчиками положения передней видеокамеры. Блок управления может быть выполнен в виде контроллера и органов управления, при этом, с целью более оперативного управления механизмами поворота передней видеокамеры, органы управления этими механизмами выполнены на пульте управления, закрепленном на штурвале управления движением транспортного средства.
С целью адекватного восприятия водителем окружающей обстановки местности при вождении транспортного средства с открытой крышкой люка и с предлагаемой системой наблюдения, ось передней видеокамеры и дисплей монитора расположены на линии зрения водителя при открытой крышке люка, а видеокамера заднего обзора расположена примерно на одной высоте с передней видеокамерой, и по ширине обе видеокамеры расположены на одном расстоянии от оси транспортного средства - передняя у левого борта, а задняя у правого борта.
Для более полного восприятия водителем положения транспортного средства на местности на видеоизображение на дисплее монитора устройством блока управления может быть наложена маркерная сетка, содержащая линию горизонта, осевую линию размещения видеокамеры на транспортном средстве, сходящиеся вверху линии габаритов транспортного средства по левому и правому бортам, дистанционные линии положения транспортного средства на местности, по боковым краям дисплея монитора нанесены угломерные линии поворота передней видеокамеры по вертикали и по нижнему краю дисплея - по горизонтали.
По сравнению с прототипом предлагаемая система наблюдения, транспортного средства отличается тем, что передняя видеокамера установлена снаружи на крышке люка водителя, расположенного на наклонном лобовом листе корпуса, а монитор установлен на внутренней поверхности крышки люка с возможностью поворота в вертикальной плоскости и фиксации в любом заданном положении, задняя видеокамера установлена в кожухе с автоматически управляемой заслонкой, закрепленном на кормовом части корпуса, и блок управления дополнительно соединен с датчиками скорости левого и правого движителей и датчиками положения передней видеокамеры. Кроме того, блок управления может быть выполнен в виде контроллера и органов управления, часть из которых может быть размещена на пульте управления, закрепленном на штурвале управления движением транспортного средства. Ось передней видеокамеры и монитора расположены на линии зрения водителя при открытом люке, а видеокамеры расположены примерно на одной высоте и ширине от оси машины - передняя у левого борта, а задняя у правого борта. А также наличие на видеоизображении монитора маркерной сетки, включающей линии горизонта, оси видеокамеры, сходящихся линий габаритов машины, дистанционных линий и угломерных линий по бокам и нижнему краю дисплея.
изобретение иллюстрируется следующими чертежами и схемами:
на фиг.1 изображен общий вид транспортного средства сбоку;
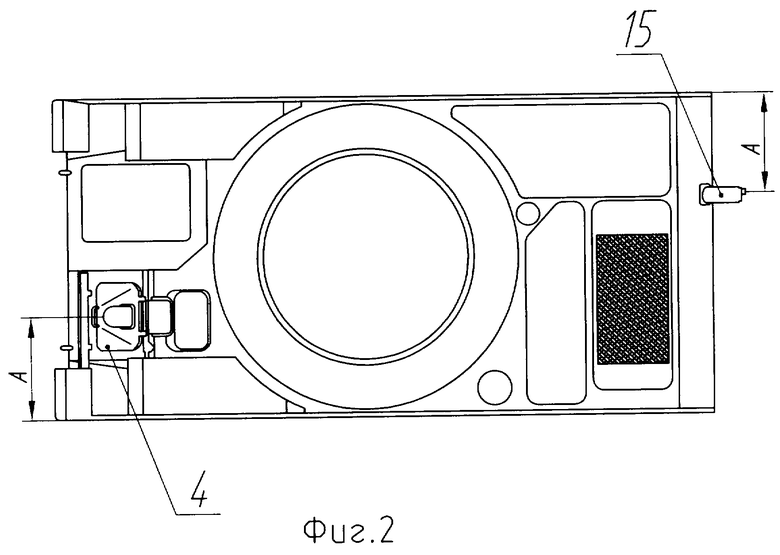
на фиг.2 - вид сверху транспортного средства;
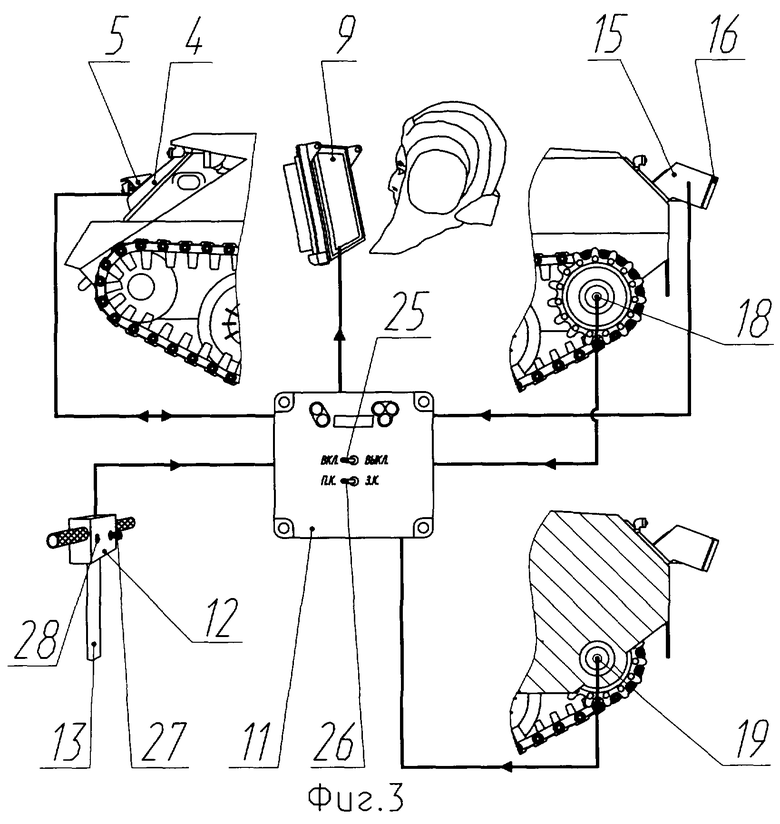
на фиг.3 - структурная схема системы наблюдения транспортного средства;
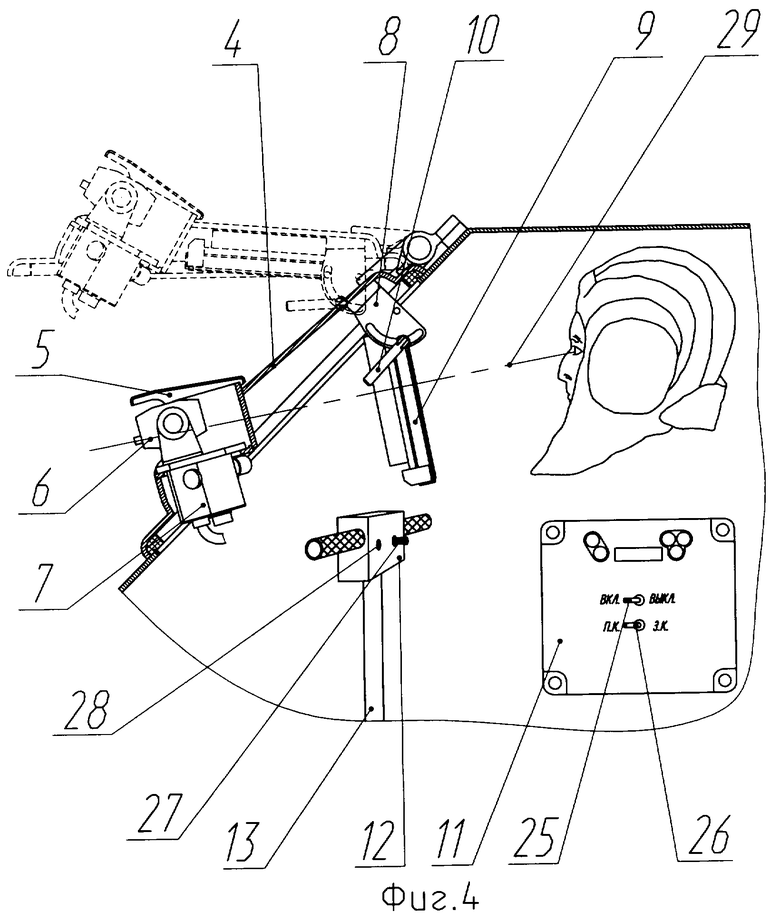
на фиг.4 - установка передней видеокамеры и монитора;
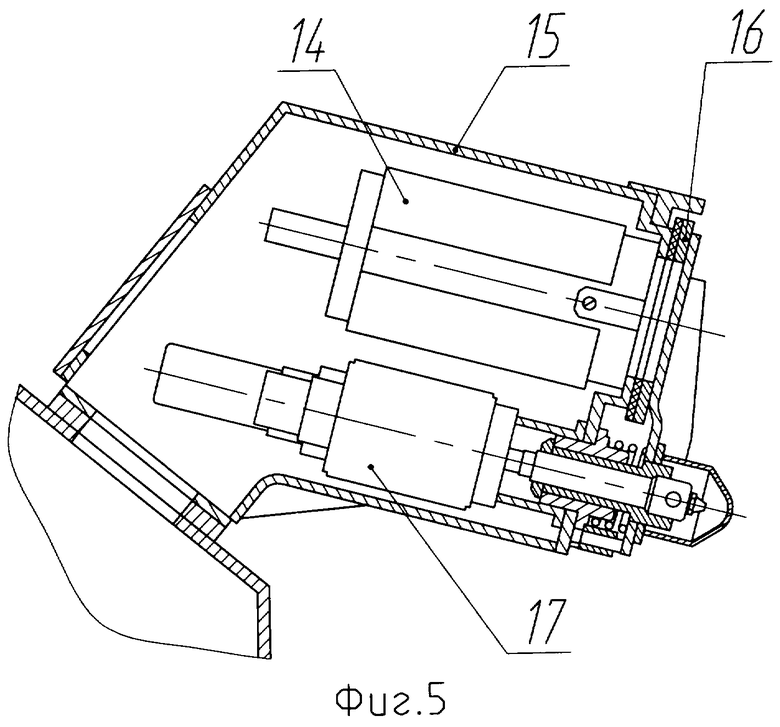
на фиг.5 - установка задней видеокамеры;
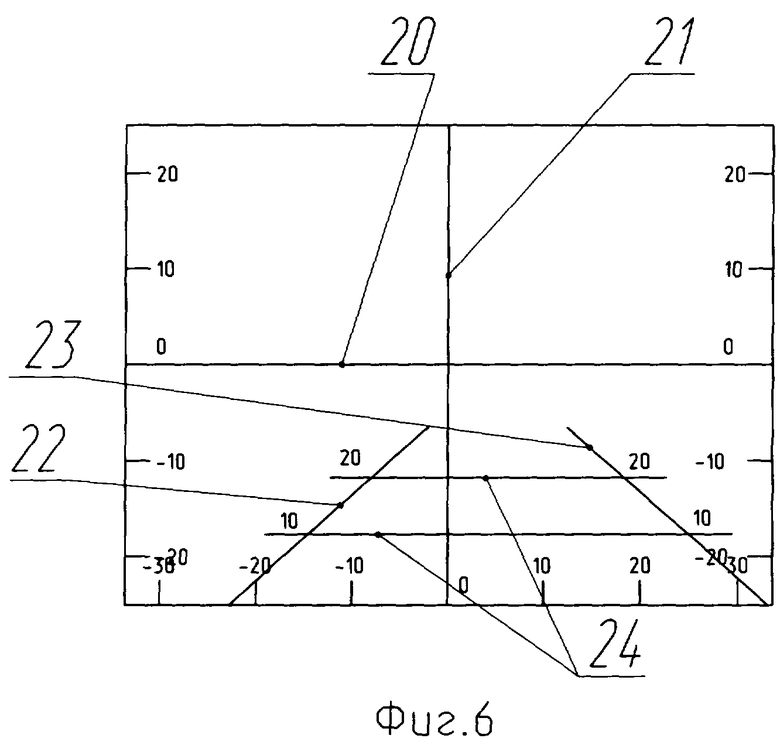
на фиг.6 - маркерная сетка на мониторе для передней видеокамеры при движении машины прямо и положении видеокамеры в исходном положении;
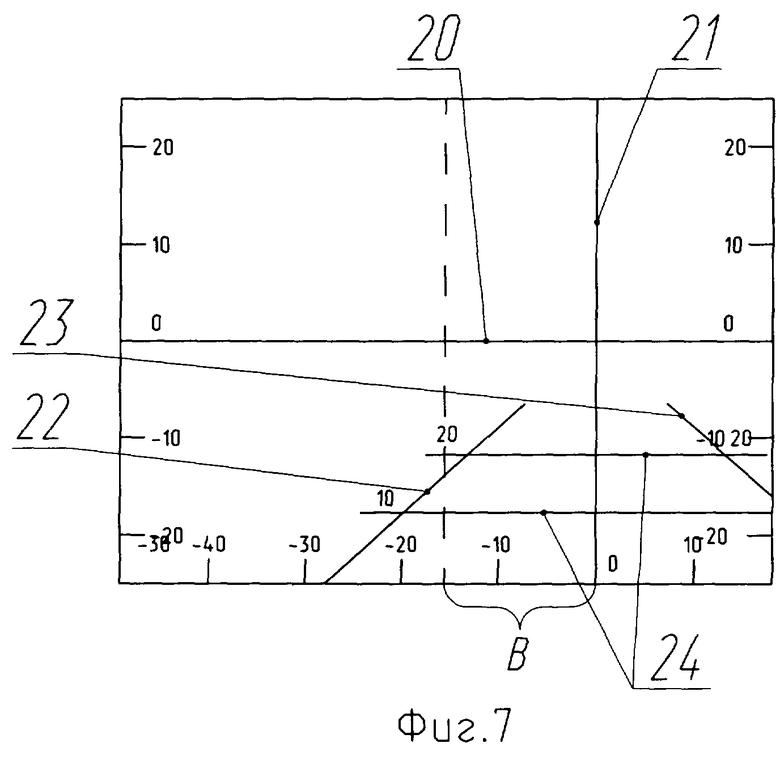
на фиг.7 - маркерная сетка на мониторе для передней видеокамеры при движении машины прямо и повернутой влево видеокамере;
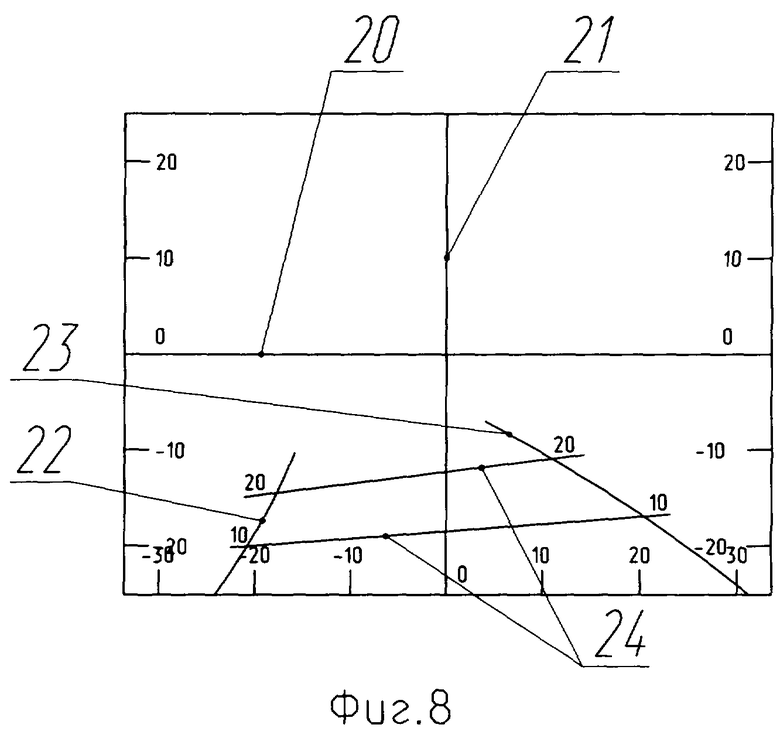
на фиг.8 - маркерная сетка на мониторе для передней видеокамеры при повороте машины влево и положении видеокамеры в исходном положении;
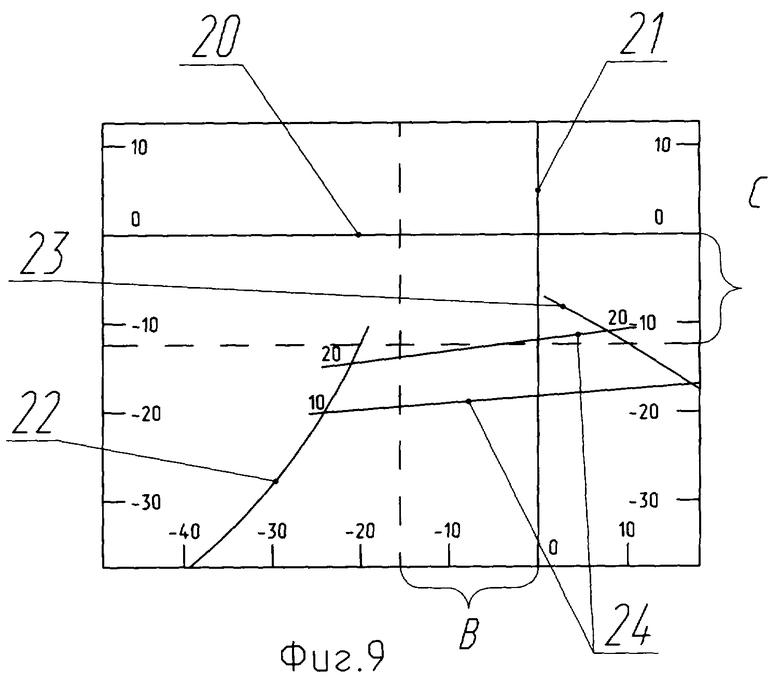
на фиг.9 - маркерная сетка на мониторе для передней видеокамеры при повороте машины влево и повернутой влево и вниз передней видеокамере;
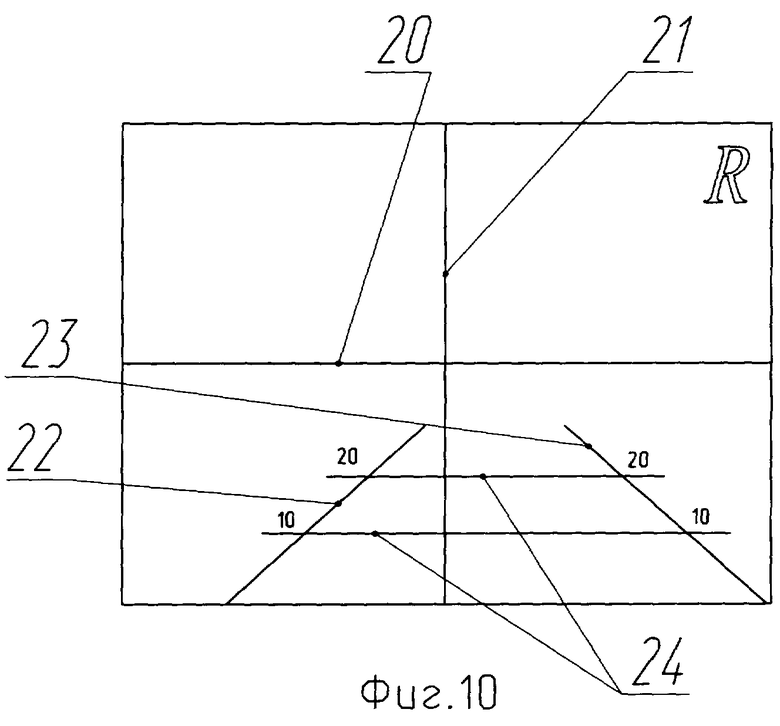
на фиг.10 - маркерная сетка на мониторе для задней видеокамеры при движении машина прямо.
Система наблюдения для военного транспортного средства, включающего корпус 1 с отделением управления 2 для размещения экипажа и гусеничную ходовую часть 3, содержит расположенную на лобовом листе корпуса крышку 4 посадочного и смотрового люка, на которой снаружи закреплен кожух 5, в котором установлена передняя видеокамера 6 с приводом 7, обеспечивающим ее поворот в двух плоскостях - горизонтальной и вертикальной. Передняя видеокамера выполнена для передачи цветного изображения. На внутренней поверхности крышки 4 закреплен кронштейн 8, в котором установлен с возможностью поворота в вертикальной плоскости монитор 9. На кронштейне 8 выполнено устройство 10 для фиксации монитора 9 в любом удобном для водителя положении.
В отделении управления размещены также электронный блок 11 управления системой наблюдения, выполненной в виде контроллера, совмещенного с органами управления. Часть органов управления для более оперативного влияния размещены на пульте 12, закрепленном на штурвале 13 управления транспортным средством.
Другая видеокамера 14, ориентированная на обзор заднего вида, установлена в корпусе 15, закрепленном в кормовой части на верхнем кормовом листе корпуса 1 транспортного средства. Корпус 15 снабжен автоматически управляемой заслонкой 16 с приводом от электромеханизма 17.
Контроллер электронного блока 11 управления соединен электрически с видеокамерами 6 и 14, пультом 12 датчиками 18 и 19 скорости левого и правого движителей и формирует на дисплее монитора 9 видеоизображение местности, передаваемого видеокамерами 6 и 14, а также наложенную на это изображение другую служебную информацию, например маркерную сетку, включающую линию 20 горизонта, продольную осевую линию 21 размещения видеокамеры, сходящиеся вверху линии 22 и 23 габаритов машины, соответственно по левому и правому бортам, дистанционные линии 24 расположения машины на местности, кроме того, по боковым и нижнему краям монитора нанесена угломерная сетка поворота передней видеокамеры: по бокам - по вертикали, а по нижнему краю - по горизонтали. На блоке управления 11 расположены следующие органы управления: тумблер 25 предназначен для включения и выключения системы наблюдения и тумблер 26 для переключения передней 6 и задней 14 видеокамер. На пульте 12 находятся тумблер 27 управления поворотом передней видеокамеры и кнопка 28 для возврата передней видеокамеры в исходное положение. Тумблер 27 имеет пять фиксированных положений: исходное вертикальное - нейтральное, левое - поворот видеокамеры влево, правое - поворот видеокамеры вправо, вверх - поворот видеокамеры вверх и вниз - поворот видеокамеры вниз.
При вождении транспортного средства с открытой крышкой люка линия зрения 29 водителя расположена под определенным углом к поверхности. Для адекватного восприятия окружающей местности при вождении с использованием предлагаемой системы наблюдения ось передней видеокамеры и дисплей монитора расположены примерно на этой линии зрения 29. С этой же целью задняя видеокамера размещена на высоте, равной или близкой к высоте размещения передней видеокамеры, и смещена от продольной оси к правому борту на расстояние А, равное или близкое размеру установки передней видеокамеры. Угол наклона оси задней видеокамеры также примерно равен углу наклона линии зрения 29 водителя при вождении с открытым люком.
Система наблюдения работает следующим образом. Включением тумблера 25 на блок управления 11 подается питание, система наблюдения включается в работу. Монитор 9 устанавливается в удобное для водителя положение и фиксируется устройством 10. При движении транспортного средства вперед переводом тумблера 26 в положение "П.К." на блоке 11 включается передняя видеокамера 6, которая находится в исходном положении. Оптическое изображение местности, сформированное объективом передней видеокамеры 6, преобразуется в электронное, затем из него формируется телевизионный сигнал, который передается на вход монитора 9. Монитор преобразует телевизионный сигнал в цветное изображение местности перед транспортным средством. На это изображение накладывается маркерная сетка, включающая перекрестие линии 20 горизонта и продольной осевой линии 21 видеокамеры, линии 22 и 23 габаритов по бортам машины, а также дистанционные линии 24. Линии 20 и 21 находятся на нулевой отметке угломерной сетки определения угла поворота передней видеокамеры. Линии 22 и 23 смещены вправо на величину смещения видеокамеры 6 от оси машины (фиг.6).
При прямолинейном движении сигналы, поступающие в контроллер блока 11 управления от датчиков 18 и 19 скорости правого и левого движителей, одинаковы и контроллер выдает сигналы на формирование прямолинейных линий 22 и 23 габаритов машины.
Для поворота передней видеокамеры, например, влево, тумблер 27 на пульте 12 нажимается влево, на дисплее монитора 9 появится новое изображение и одновременно сместиться вправо линия 21 продольной оси на величину "В" угла поворота видеокамеры, также смещаются вправо линии 22, 23 габаритов транспортного средства и дистанционные линии 24. Для поворота передней видеокамеры вправо нажимают тумблер 27 вправо и на дисплее произойдет изменение картинки и аналогичное смещение линий 21, 22, 23 и 24 в противоположную сторону - влево. Для возврата передней видеокамеры в исходное положение нажимается кнопка 28 на пульте 12, при этом на дисплее монитора восстанавливается первоначальное положение всех линий маркерной сетки.
Для поворота передней видеокамеры 6 по вертикали вверх тумблер 27 на пульте 12 нажимают вверх. При этом на мониторе изменится изображение и линии 20, 22, 23 и 24 переместятся вниз на величину С (фиг.9).
При нажатии тумблера 27 вниз на дисплее произойдет изменение картинки и аналогичное смещение линий 20, 22, 23 и 24, но только в противоположную сторону - вверх.
При повороте транспортного средства, например, влево картинка на дисплее монитора будет меняться с поворотом машины. Сигналы, поступающие в контроллер блока 11 управления от датчиков 18 и 19 скорости левого и правого движителей, будут разными и контроллер выдаст команду на изменение положений линий 22 и 23 габаритов машины и дистанционных линий 24. При этом линии 22 и 23 габаритов машины будут искривляться, показывая траекторию поворота транспортного средства (фиг.8). При повороте вправо на дисплее монитора будут аналогичные изменения, только смещения будут происходить вправо.
На фиг.9 показано положение линий маркерной сетки на дисплее монитора при повороте транспортного средства влево, видеокамера 6 повернута влево и вниз. Поскольку видеокамера повернута вниз на некоторый угол, линия 20 горизонта смещена вверх на величину С угла поворота видеокамеры по вертикали, а линия 21 продольной оси смещается вправо на величину В угла поворота видеокамеры по горизонтали, линии 22 и 23 габаритов и дистанционные линии 24 смещаются вправо и меняют свою форму. При возврате к прямолинейному движению и нажатии кнопки 28 передняя видеокамера возвращается в исходное положение и на дисплее монитора восстанавливается первоначальное положение всех линий маркерной сетки.
Для получения изображения заднего вида за кормой транспортного средства тумблер 26 переводится в положение "З.К.", при этом автоматически электропривод 17 открывает заслонку 16, передняя видеокамера отключается и включается видеокамера 14 заднего вида. На дисплее монитора появляется черно-белое изображения заднего вида, а также маркерная сетка линий 20, 21, 22, 23 и 24 (фиг.10), а в правом верхнем углу дисплея монитора - буква "R".
При этом линии 22, 23 и 24, как и при движении вперед, будут прямолинейными при движении по прямой и криволинейными при повороте транспортного средства.
Для выключения системы наблюдения тумблер 25 на блоке 11 переводится в положение "ВЫКЛ.", при этом, если работала задняя видеокамера 14, закрывается заслонка 16 и затем отключается энергопитание, система выключена.
При движении транспортного средства с выключенной системой наблюдения и с открытым смотровым люком монитор 9 устанавливается в крайнее прижатое к крышке люка 4 положение и фиксируется механизмом 10, при этом элементы системы наблюдения не перекрывают поле зрения для водителя. Для просмотра изображения заднего вида с открытой крышкой люка, например при парковке, монитор устанавливается в удобное для водителя положение, тумблером 25 включается питание блока 11 управления, тумблером 26 включается задняя видеокамера 14 и открывается заслонка 16. Система наблюдения при этом используется в качестве зеркала заднего вида.
Предложенное техническое решение реализовано на опытном образце военного транспортного средства. Испытания опытного образца с предложенным техническим решением подтвердило его высокую эффективность и рекомендовано к использованию при изготовлении и модернизации транспортных средств.
Библиографические данные источников информации
1. ЗСУ - 23 - 4М. Гусеничная машина ГМ-575. Техническое описание и инструкция по эксплуатации. Альбом рисунков. ОИ-575-3, рис.5-1, 5-3.
2. Гусеничная машина 568М2. Техническое описание. Часть 2. Альбом рисунков. 568М2 ТОА 2, изд. №3 / 66414 р-П7, 1977 г. рис. 1, 4.
3. Видеосистема для транспортного средства. А.С. СССР №1758922, Н 05 К 11/02, 1989 г.
4. Смотровое средство для транспортного средства без стекол. Патент ФРГ №2713490 A1, B 60 R 1/10, 1978 г.
5. Устройство для отображения заднего обзора автомобиля. Заявка Японии №4-25172, B 60 R 1/00, 1985 г.
6. Система наблюдения для военного транспортного средства. Патент США №4518990, H 04 N 7/18, 1985 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2012 |
|
RU2501700C1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2007 |
|
RU2404400C2 |
| Способ определения оси канала ствола для выверки прицелов и устройство для его осуществления | 2024 |
|
RU2836658C1 |
| Боевой ударный радиоуправляемый комплекс | 2021 |
|
RU2757095C1 |
| Боевой ударный радиоуправляемый комплекс | 2021 |
|
RU2767103C1 |
| ПОДВИЖНОЙ ПОСТ ТЕХНИЧЕСКОГО НАБЛЮДЕНИЯ "ЗВЕРОБОЙ-М" | 2014 |
|
RU2563699C1 |
| Гусеничный лежачий электроскутер | 2022 |
|
RU2793388C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ АВТОМОБИЛЬНАЯ СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ | 2011 |
|
RU2480356C2 |
| БРОНЕТРАНСПОРТЕР | 2007 |
|
RU2369825C2 |
Изобретение относится к транспортным средствам, преимущественно военного назначения, содержащим корпус с отделением управления и посадочным люком водителя с крышкой на лобовом листе. Система наблюдения включает в себя две видеокамеры, соединенные через электронный блок управления с монитором установленным перед водителем. Передняя видеокамера установлена в передней части корпуса, снаружи на крышке люка водителя, с возможностью поворота в вертикальной и горизонтальной плоскостях. Видеокамера заднего обзора установлена в задней части корпуса в жестко закрепленном кожухе с автоматически открываемой заслонкой. Монитор установлен на внутренней поверхности крышки люка водителя с возможностью поворота в продольной вертикальной плоскости и фиксации в удобном для водителя положении, а блок управления дополнительно соединен с датчиками скорости левого и правого движителей и датчиками положения передней видеокамеры. Электронный блок управления содержит контроллер и органы управления, часть которых размещена на штурвале управления транспортным средством. На дисплее монитора блоком управления сформирована маркерная сетка, содержащая линию горизонта, осевую линию размещения видеокамеры, сходящиеся габаритные линии транспортного средства, дистанционные линии и угломерную сетку угла поворота передней видеокамеры. Технический результат заключается в обеспечении возможности наблюдения за местностью спереди и сзади машины. 3 з.п. ф-лы, 10 ил.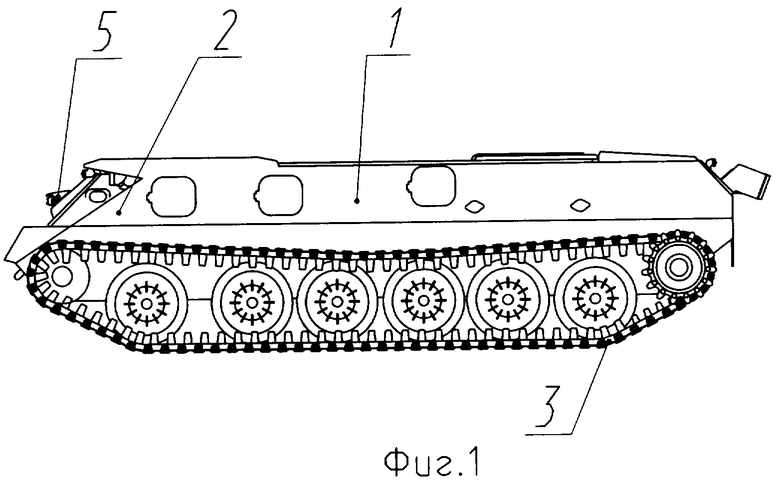
| Независимое военное обозрение | |||
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| US 6498620 В2, 24.12.2002 | |||
| Массообменная контактная тарелка | 1985 |
|
SU1308346A1 |
| Прибор для измерения длин | 1930 |
|
SU19796A1 |

