Изобретение относится к механизмам для ограничения хода рабочих органов и предназначено для использования преимущественно в устройствах, имеющих довольно высокие инерционные характеристики рабочих органов, например в грузоподъемных устройствах с приводом от гидромотора.
Известен механизм ограничения хода рабочего органа, содержащий двуплечий рычаг с коротким и длинным плечами и управляющее устройство с входным звеном (см. а.с. СССР № 660931, кл. B 66 F 17/00). В данном механизме двуплечий рычаг подпружинен пружиной и расположен с возможностью взаимодействия длинным плечом с входным звеном управляющего приводом рабочего органа устройства. На коротком плече этого рычага установлен опорный ролик, взаимодействующий с рабочим органом.
Недостатком этого механизма является то, что он не обеспечивает блокировку входного звена управляющего приводом рабочего органа устройства после перемещения рабочего органа в обратном направлении. Объясняется это тем, что при перемещении рабочего органа в обратном направлении пружина поворачивает двуплечий рычаг в исходное положение и его длинное плечо перестает воздействовать на входное звено управляющего приводом рабочего органа устройства.
Известен другой механизм ограничения хода рабочего органа, содержащий толкатель, двуплечий рычаг и управляющее устройство с входным звеном (см. а.с. СССР № 586448, кл. G 05 G 5/08). В данном механизме толкатель установлен с возможностью взаимодействия с входным звеном управляющего приводом рабочего органа устройства, а двуплечий рычаг подпружинен пружиной и расположен с возможностью взаимодействия с проточкой толкателя.
Данный механизм по сравнению с вышеописанным обеспечивает блокировку входного звена управляющего приводом рабочего органа устройства после перемещения рабочего органа в обратном направлении. Эта блокировка обеспечивается поворотом двуплечего рычага пружиной и вхождением одного из его плеч в проточку толкателя, взаимодействующего с входным звеном управляющего приводом рабочего органа устройства.
Недостаток этого механизма заключается в том, что его невозможно использовать для ограничения хода рабочего органа, имеющего высокие инерционные характеристики, например, для ограничения хода грузоподъемной траверсы лебедки, имеющей гидромоторный привод, т.е. привод, имеющий довольно высокие инерционные характеристики.
Объясняется это тем, что перемещение такого рабочего органа какое-то время продолжается по инерции и после того, как толкатель, с которым взаимодействует этот рабочий орган, переключит управляющее устройство. Дальнейшее же перемещение толкателя рабочим органом приводит к повреждению управляющего приводом рабочего органа устройства этим толкателем или выходу из строя самого толкателя.
Задачей настоящего изобретения является разработка конструкции механизма ограничения хода рабочего органа, имеющего высокие инерционные характеристики.
Поставленная задача решается тем, что в механизме ограничения хода рабочего органа, преимущественно имеющего высокие инерционные характеристики, содержащем толкатель, связанный с рабочим органом, двуплечий рычаг и управляющее приводом рабочего органа устройство с входным звеном, толкатель снабжен смонтированным на его конце амортизатором, а двуплечий рычаг выполнен с длинным и коротким плечами и расположен с возможностью взаимодействия длинным плечом через амортизатор с толкателем, а коротким плечом - с входным звеном управляющего приводом рабочего органа устройства для обеспечения временной блокировки входного звена.
Такое выполнение конструкции механизма ограничения хода рабочего органа позволяет рабочему органу воздействовать на входное звено управляющего приводом рабочего органа устройства через амортизатор толкателя и длинное плечо двуплечего рычага, длина хода которого больше длины хода его короткого плеча, воздействующего на входное звено управляющего приводом рабочего органа устройства. Это обеспечивает инерционный ход рабочего органа без повреждения управляющего приводом рабочего органа устройства, а после переключения управляющего приводом рабочего органа устройства обеспечивает временную блокировку его входного звена в указанном положении.
Таким образом, технический результат предлагаемого механизма заключается в обеспечении ограничения хода рабочего органа, имеющего высокие инерционные характеристики.
Предлагаемый механизм ограничения хода рабочего органа иллюстрируется чертежом.
Механизм ограничения хода рабочего органа 1, преимущественно имеющего высокие инерционные характеристики, содержит толкатель 2, связанный с рабочим органом 1, двуплечий рычаг 3 и управляющее приводом рабочего органа 1 устройство 4 с входным звеном 5. Толкатель 2 снабжен смонтированным на его конце амортизатором 6. Двуплечий рычаг 3 выполнен с длинным 7 и коротким 8 плечами и расположен с возможностью взаимодействия длинным плечом 7 с амортизатором 6, а коротким плечом 8 - с входным звеном 5 управляющего приводом рабочего органа 1 устройства 4.
В качестве амортизатора 6 может быть использован пружинный, пневматический или гидравлический амортизатор. В данном примере конкретного исполнения использован пружинный амортизатор, содержащий стакан 9 и пружину 10. Стакан 9 установлен на толкателе 2 с возможностью перемещения вдоль него, а пружина 10 контактирует с кольцевым выступом 11 толкателя 2.
В данном примере конкретного исполнения управляющее приводом рабочего органа устройство 4 выполнено в виде гидрораспределителя, оно может быть выполнено также в виде электрического переключателя.
Позицией 12 обозначена опора предлагаемого механизма. Толкатель 2 установлен в направляющей 13 и подпружинен пружиной 14 для возврата его в исходное положение. Позицией 15 обозначена ось поворота двуплечего рычага 2. Двуплечий рычаг 2 подпружинен пружиной 16, которая поджимает его к амортизатору 6.
Механизм ограничения хода рабочего органа работает следующим образом.
При подходе рабочего органа 1, например грузоподъемной траверсы лебедки с гидромоторным приводом (не показаны), к верхнему предельному положению рабочий орган 1 воздействует на толкатель 2, перемещая его вверх (по чертежу), сжимая его пружину 14. Толкатель 2 через амортизатор 6, воздействующий на длинное плечо 7 двуплечего рычага 3, поворачивает последний по часовой стрелке (по чертежу). Поворачиваясь, двуплечий рычаг 3 своим коротким плечом 8 нажимает на входное звено 5 управляющего приводом рабочего органа 1 устройства 4 и переключает его на перемещение рабочего органа 1 вниз (по чертежу). После переключения управляющего приводом рабочего органа 1 устройства 4 рабочий орган 1 продолжает какое-то время по инерции двигаться вверх (по чертежу). Такое движение рабочего органа 1 происходит беспрепятственно за счет того, что длина хода длинного плеча 7 двуплечего рычага 3 больше длины хода короткого плеча 8 рычага 3. После стопорения входного звена 5 в управляющем устройстве 4, а следовательно, и стопорения двуплечего рычага 3, инерционное движение рабочего органа 1 происходит за счет сжатия пружины 10 амортизатора 6 толкателем 2, перемещающимся в стакане 9 амортизатора 6. Стакан 9 в это время упирается в длинное плечо 7 неподвижного двуплечего рычага 3.
Затем рабочий орган 1 начинает перемещаться вниз (по чертежу). Толкатель 2 под действием пружин 14 и 10 также перемещается вниз и постепенно разжимает пружину 10 амортизатора 6. После полного разжатия пружины 10 амортизатора 6 последний вместе с толкателем 2 под действием пружины 14 перемещается вниз (по чертежу). Двуплечий рычаг 3 под действием пружины 16 поворачивается против часовой стрелки (по чертежу), освобождая входное звено 5 управляющего устройства 4, которое перемещается вверх (по чертежу) в свое исходное положение и переключает управляющее устройство 4 на перемещение рабочего органа 1 вверх (по чертежу). Таким образом, время, необходимое для полного разжатия пружины 10 амортизатора 6, и разность длины хода длинного плеча 7 и длины хода короткого плеча 8 двуплечего рычага 3 обеспечивают временную блокировку входного звена 5 управляющего устройства 4 в переключенном положении, во время которого рабочий орган 1 перемещается вниз.
В дальнейшем цикл работы предлагаемого механизма может повториться в вышеописанной последовательности, пока оператор не заметит это и с пульта управления в зависимости от производственной необходимости не даст команду на отключение перемещения рабочего органа 1 или на перемещение его вниз.
Таким образом, использование предлагаемого механизма обеспечивает ограничение хода рабочего органа, имеющего высокие инерционные характеристики.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения вагонов | 1989 |
|
SU1703524A1 |
| СТРЕЛКОВОЕ ОРУЖИЕ С НЕПРЕРЫВНЫМ РЕЖИМОМ СТРЕЛЬБЫ (ВАРИАНТЫ), ФУНКЦИОНАЛЬНЫЕ УЗЛЫ СТРЕЛКОВОГО ОРУЖИЯ И СПОСОБ ОДНОВРЕМЕННОГО СНИЖЕНИЯ ОТДАЧИ И УРОВНЯ ЗВУКА СТРЕЛКОВОГО ОРУЖИЯ | 2003 |
|
RU2254539C1 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПРИСТВОЛЬНЫХ ПОЛОС В САДУ | 2006 |
|
RU2326516C2 |
| Механизм привода транспортера кормораздатчика | 1989 |
|
SU1644844A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| РЫЧАЖНО-КУЛАЧКОВЫЙ МЕХАНИЗМ | 1991 |
|
RU2011071C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ НОЖА РЫБОРАЗДЕЛОЧНОЙ МАШИНЫ | 2010 |
|
RU2447666C1 |
| Устройство для выгрузки слеживающихся и сыпучих материалов | 1989 |
|
SU1729959A1 |
| ВЫСОКОСКОРОСТНАЯ ПОВОРОТНАЯ КАРЕТКА | 1992 |
|
RU2091640C1 |
| ПРОХОДНОЙ ЗАПОРНЫЙ КЛАПАН, САМОЗАКРЫВАЮЩИЙСЯ ПРИ ОТСУТСТВИИ ДАВЛЕНИЯ НА ЕГО ВХОДЕ | 2003 |
|
RU2258167C1 |
Изобретение относится к механизмам для ограничения хода рабочих органов и предназначено для использования преимущественно в устройствах, имеющих довольно высокие инерционные характеристики рабочих органов, например в грузоподъемных устройствах с приводом от гидромотора. Механизм ограничения хода рабочего органа содержит толкатель, связанный с рабочим органом, двуплечий рычаг и управляющее приводом рабочего органа устройство с входным звеном. Толкатель снабжен смонтированным на его конце амортизатором, а двуплечий рычаг выполнен с длинным и коротким плечами и расположен с возможностью взаимодействия длинным плечом через амортизатор с толкателем, а коротким плечом - с входным звеном управляющего приводом рабочего органа устройства для обеспечения временной блокировки входного звена. Технический результат заключается в обеспечении ограничения хода рабочего органа, имеющего высокие инерционные характеристики. 1 ил.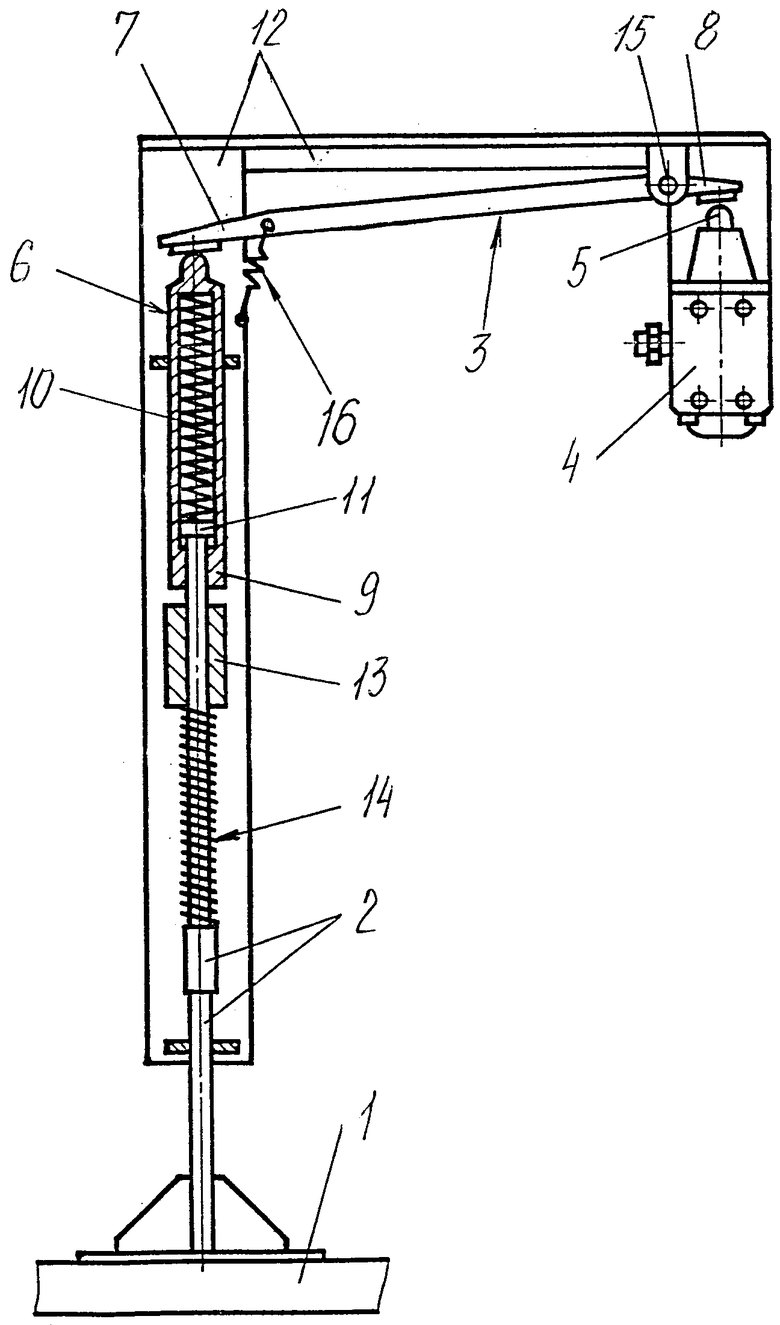
Механизм ограничения хода рабочего органа, преимущественно имеющего высокие инерционные характеристики, содержащий толкатель, связанный с рабочим органом, двуплечий рычаг и управляющее приводом рабочего органа устройство с входным звеном, отличающееся тем, что толкатель снабжен смонтированным на его конце амортизатором, а двуплечий рычаг выполнен с длинным и коротким плечами и расположен с возможностью взаимодействия длинным плечом через амортизатор с толкателем, а коротким плечом - с входным звеном управляющего приводом рабочего органа устройства для обеспечения временной блокировки входного звена.
| Ограничительное устройство | 1977 |
|
SU660931A1 |
| Механизм переключения | 1975 |
|
SU918943A1 |
| Автоматическое блокирующее устройство | 1975 |
|
SU586448A1 |
| US 3534637, 20.10.1970. | |||

