1
(21)46981 (Ш1Ь
(22)30„05089
(46) 30„04.91 о Бюл. К 16
(71)Всесоюзный научно-исследовательский институт комплексных проблем машиностроения для животноводства и кормопроизводства
(72)Е.ЛоСосновский, В,Д„Милев, АоА„Кутлембетов и Л, Г„ Зайцев
(53)636.084(088.8)
(56)Авторское свидетельство СССР № 209910, кл. А 01 К 3/00, 19ЬЬ0
Авторское свидетельство СССР № 464491, кл, А 01 К 5/00, 1973
(54)МЕХАНИЗМ ПРИВОДА ТРАНСПОРТЕРА КОРМОРАЗДАТЧИКА
(57)Изобретение относится к сельскохозяйственному машиностроению и обеспечивает упрощение регулирования скорости транспортера при реверсивном режиме его работы и повышение эксплуатационной надежности. Механизм привода содержит связанное с транспортером ведомое колесо 1, взаимодействующее с толкателем 2, который может быть выполнен в виде двух- плечевой собачки или самотормозящегося ползуна Толкатель совершает возвратно-колебательное движение от тяги 4 и ведущего кривотипа 5„ Для реверсивного переключения толкателя служат связанный с ним и установленный с возможностью поворота вокруг оси ведомого колеса двуплечий элемент 8 и шарнирно присоединенная к нему телескопическая подпружиненная штанга II, управляемая при помощи фиксируемого на пластине 14 в различных положениях двуплечего рычага 13„ Для этого под действием штанги 11 и элемента 8 толкатель 2 переводится в другой сектор ведомого колеса, в котором обеспечивается поворот ведомого колеса в противоположном направлении,, 3 ЗоПо ф-лы, 9 ил,
(Я
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для раздачи концентрированных кормов при привязном содержании животных | 1990 |
|
SU1794422A1 |
| Автоматическая линия для изготовления арматурных каркасов | 1984 |
|
SU1337176A1 |
| Автоматический ключ для свинчивания и развинчивания насосных штанг | 1986 |
|
SU1350325A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
| Кормораздатчик | 1986 |
|
SU1387931A1 |
| Швейный полуавтомат для выполнения коротких строчек | 1976 |
|
SU616351A1 |
| ПРЕДОХРАНИТЕЛЬНАЯ МУФТА СЦЕПЛЕНИЯ | 1991 |
|
RU2018736C1 |
| ШТАНГОВЫЙ СКРЕБКОВЫЙ ТРАНСПОРТЕР | 2006 |
|
RU2310322C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Кормораздатчик | 1983 |
|
SU1138079A1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к механизмам приводов транспортеров кормораздатчиков о
Цель изобретения - упрощение регулирования скорости транспортера при реверсивном режиме его работы- и повышение эксплуатационной надежности,,
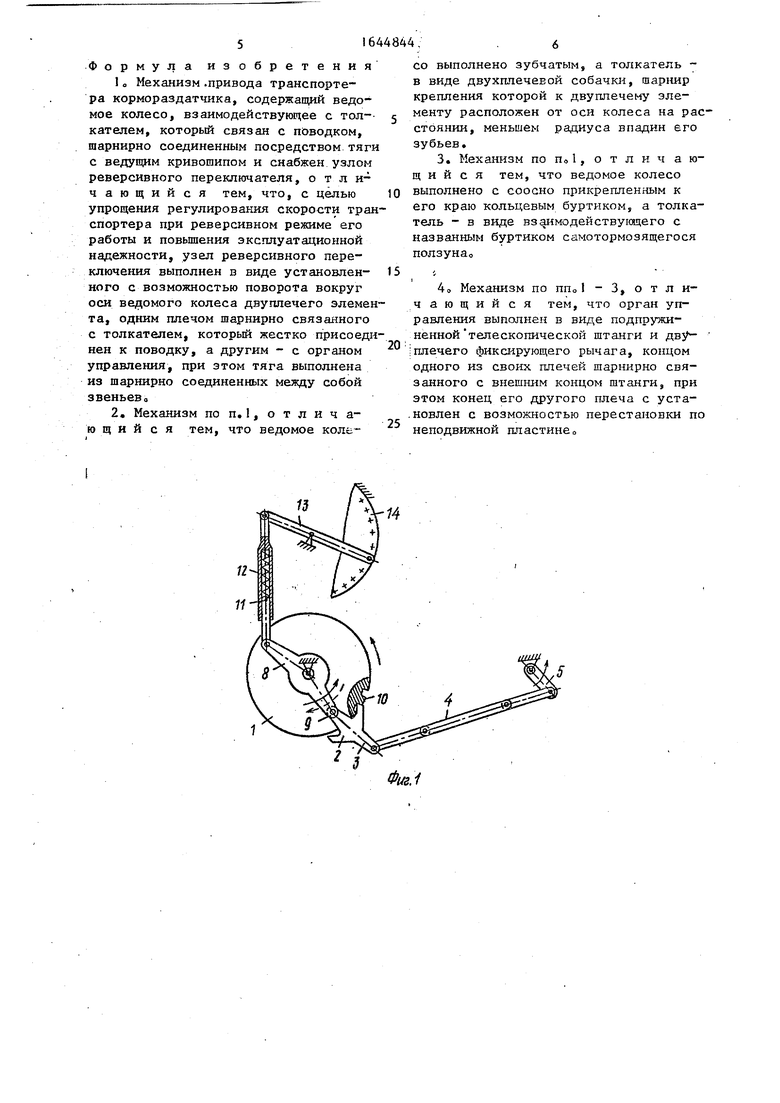
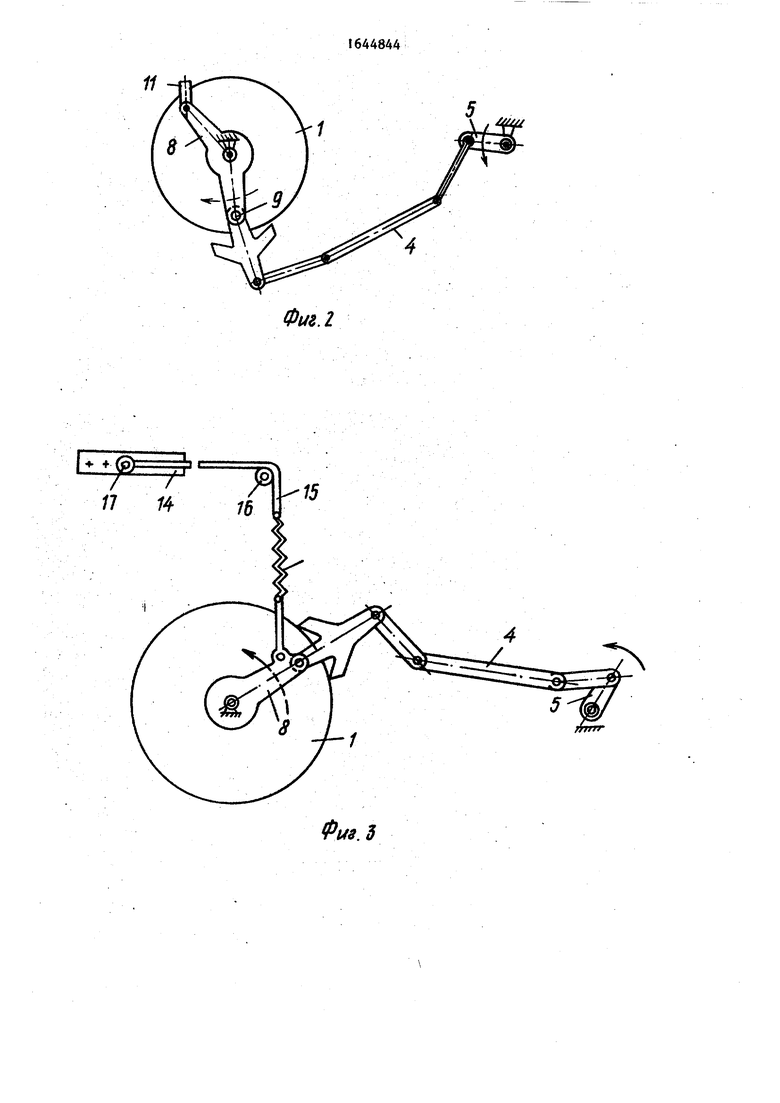
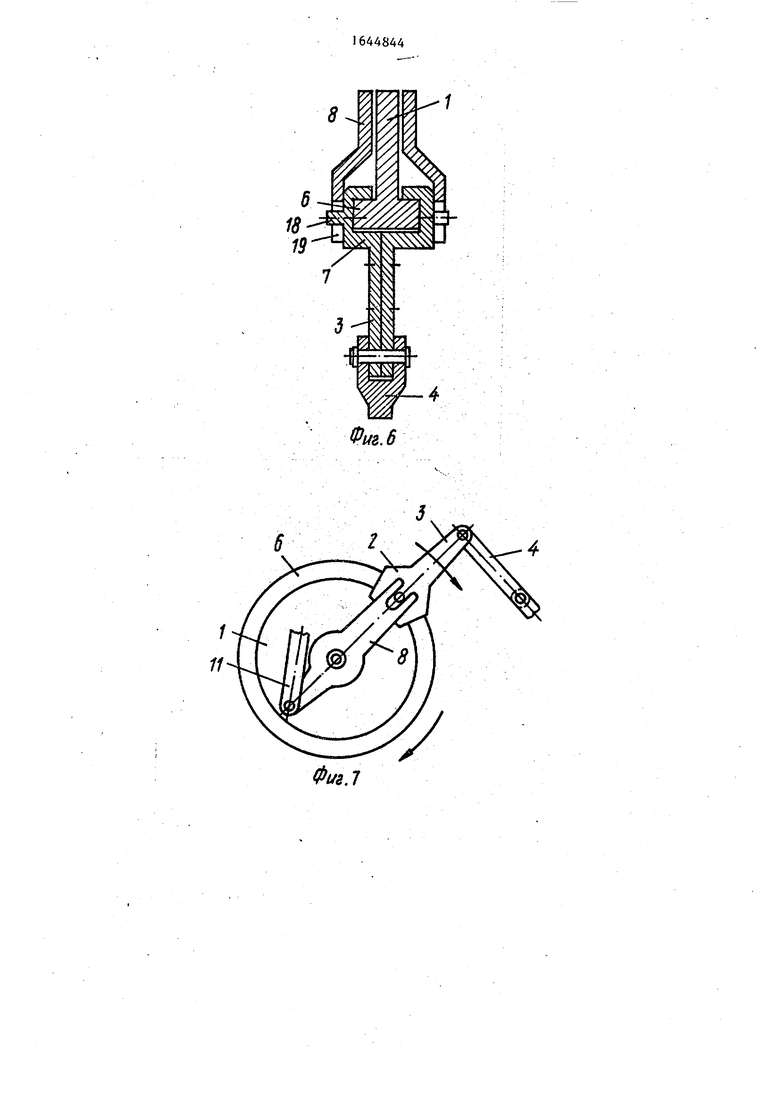
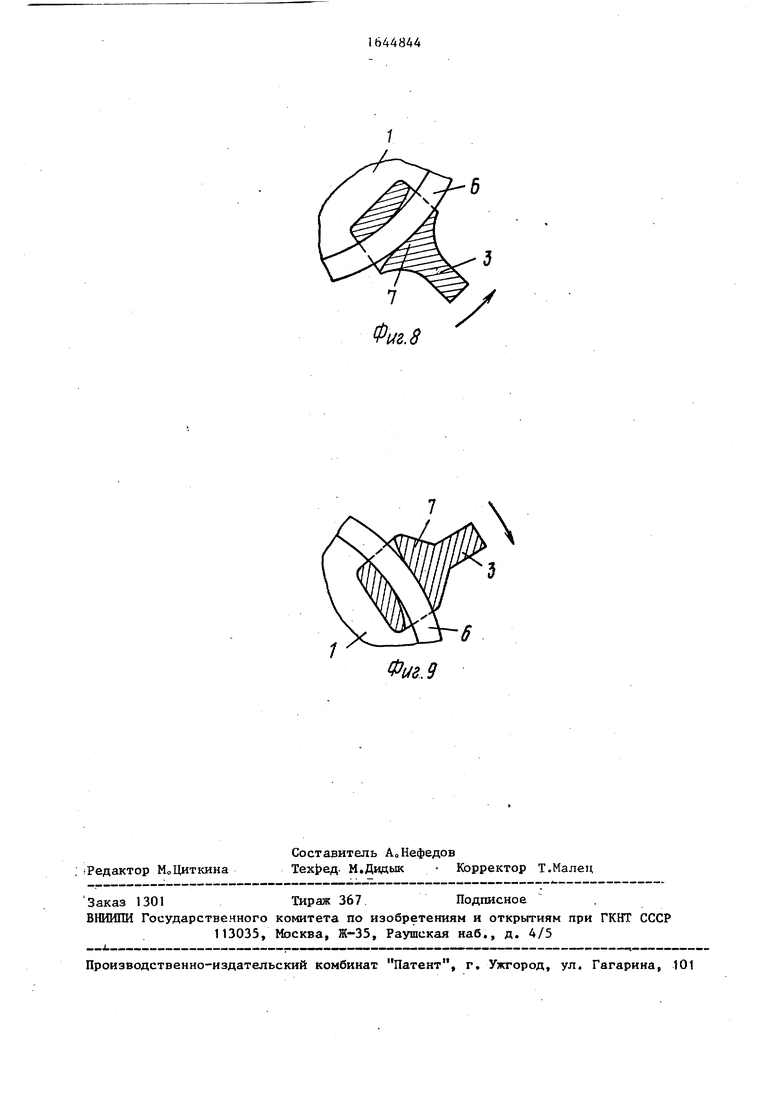
На схематично изображен вариант механизма привода транспортера с ведомым зубчатым колесом, рабочий ход, общий вид; на - то же, холостой ход; на - то же, при выполнении органа управления с гибкой пружинной тягой; на фиг.4 - то же, при реверсе транспортера, рабочий ход; на фиг 5 - вариант механизма привода с ведомым колесом, имеющим кольцевой буртик, рабочий ход; на фигоб - то же$ поперечный разрезj на фиг,7 - то же, холостой ход; на фигоВ - схема взаимодействия самотормозящегося ползуна с кольцевым буртиком, рабочий ход| ча фиг„У - то же, холостой ход
Механизм привода содержит ведомое колесо It связанное с транспортером кормораздатчика и взанмодейстоэ
4 4.
00
Јь
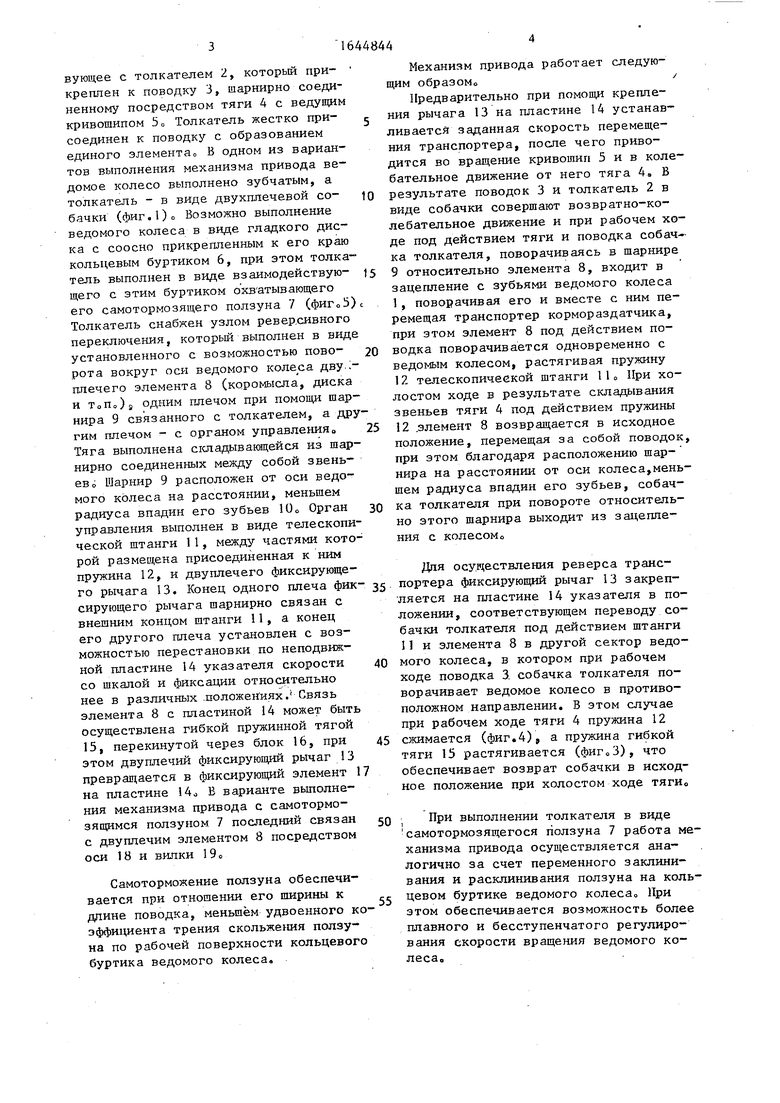
вующее с толкателем 2, который при- креплен к поводку 3, шарнирно соединенному посредством тяги 4 с ведущим кривошипом 5 о Толкатель жестко при- соединен к поводку с образованием единого элементао В одном из вариантов выполнения механизма привода ведомое колесо выполнено зубчатым, а толкатель - в виде двухплечевой со- бачки (фиг.1)о Возможно выполнение ведомого колеса в виде гладкого диска с соосно прикрепленным к его краю кольцевым буртиком 6, при этом толкатель выполнен в виде взаимодействую- щего с этим буртиком охв атывающего его самотормозящего ползуна 7 (фиг05) Толкатель снабжен узлом реверсивного переключения, который выполнен в виде установленного с возможностью ново- рота вокруг оси ведомого дву .- плечего элемента 8 (коромысла, диска и т0п„)3 одним плечом при помощи шарнира 9 связанного с толкателем, а другим плечом - с органом управления,, Тяга выполнена складывающейся из шарнирно соединенных между собой звень- ев0 Шарнир 9 расположен от оси ведомого колеса на расстоянии, меньшем радиуса впадин его зубьев 100 Орган управления выполнен в виде телескопической штанги 11, между частями которой размещена присоединенная к ним пружина 12, и двуплечего фиксирующего рычага 13. Конец одного плеча фик- сирующего рычага шарнирно связан с внешним концом штанги 11, а конец его другого плеча установлен с возможностью перестановки по неподвижной пластине 14 указателя скорости со шкалой и фиксации относительно нее в различных положениях.1 Связь элемента 8 с пластиной 14 может быть осуществлена гибкой пружинной тягой 15, перекинутой через блок 16, при этом двуплечий фиксирующий рычаг 13 превращается в фиксирующий элемент 17 на пластине 140 В варианте выполнения механизма привода с самотормозящимся ползуном 7 последний связан с двуплечим элементом 8 посредством оси 18 и вилки 19
Самоторможение ползуна обеспечивается при отношении его ширины к длине поводка, меньшем удвоенного коэффициента трения скольжения ползуна по рабочей поверхности кольцевого буртика ведомого колеса.
5 0 5 0 5 0 5 0
5
Механизм привода работает следующим образом /
Предварительно при помощи крепления рычага 13 на пластине 14 устанавливается заданная скорость перемещения транспортера, после чего приводится во вращение кривошип 5 и в колебательное движение от него тяга 4в В результате поводок 3 и толкатель 2 в виде собачки совершают возвратно-колебательное движение и при рабочем ходе под действием тяги и поводка собачка толкателя, поворачиваясь в шарнире 9 относительно элемента 8, входит в зацепление с зубьями ведомого колеса 1, поворачивая его и вместе с ним перемещая транспортер кормораздатчика, при этом элемент 8 под действием поводка поворачивается одновременно с ведомым колесом, растягивая пружину 12 телескопической штанги 110 При холостом ходе в результате складывания звеньев тяги 4 под действием пружины 12 .элемент 8 возвращается в исходное положение, перемещая за собой поводок, при этом благодаря расположению шар- нира на расстоянии от оси колеса,меньшем радиуса впадин его зубьев, собачка толкателя при повороте относительно этого шарнира выходит из зацепления с колесом0
Для осуществления реверса транспортера фиксирующий рычаг 13 закрепляется на пластине 14 указателя в положении, соответствующем переводу собачки толкателя под действием штанги I1 и элемента 8 в другой сектор ведомого колеса, в котором при рабочем ходе поводка 3 собачка толкателя поворачивает ведомое колесо в противоположном направлении. В этом случае при рабочем ходе тяги 4 пружина 12 сжимается (фиг.4), а пружина гибкой тяги 15 растягивается (фигоЗ), что обеспечивает возврат собачки в исходное положение при холостом ходе тяги„
i При выполнении толкателя в виде самотормозящегося ползуна 7 работа механизма привода осуществляется аналогично за счет переменного заклинивания и расклинивания ползуна на кольцевом буртике ведомого колеса При этом обеспечивается возможность более плавного и бесступенчатого регулирования скорости вращения ведомого колеса.
Формула изобретения
1 о Механизм .привода транспортера кормораздатчика, содержащий ведомое колесо, взаимодействующее с толкателем, который связан с поводком, шарнирно соединенным посредством тяг с ведущим кривошипом и снабжен узлом реверсивного переключателя, отличающийся тем, что, с целью упрощения регулирования скорости транспортера при реверсивном режиме его работы и повышения эксплуатационной надежности, узел реверсивного переключения выполнен в виде установлен- ного с возможностью поворота вокруг оси ведомого колеса двуплечего элемента, одним плечом шарнирно связанного с толкателем, который жестко присоединен к поводку, а другим - с органом управления, при этом тяга выполнена из шарнирно соединенных между собой звеньев
5
0
5
со выполнено зубчатым, а толкатель - в виде двухплечевой собачки, шарнир крепления которой к двуплечему элементу расположен от оси колеса на рас стоянии, меньшем радиуса впадин его зубьев.
4 о Механизм по пп01 - 3, о т л и- ч ающий ся тем, что орган управления выполнен в виде подпружиненной телескопической штанги и двуплечего фиксирующего рычага, концом одного из своих плечей шарнирно связанного с внешним концом штанги, при этом конец его другого плеча с установлен с возможностью перестановки по неподвижной пластине„
Фиг-i
91
x-LJ1 1и(3) +
1 V8ft79I
CJM
Or
8
Фиг. 6
Фиг.7
4
Фиг.9
