(5А) МЕХАНИЗМ ПЕРЕКЛЮЧЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочно-разгрузочное устройство к горизонтальному поворотному столу | 1984 |
|
SU1180226A1 |
| Устройство для укладки ампул в кассету | 1988 |
|
SU1622224A1 |
| Пневмокоммутатор | 1987 |
|
SU1439419A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| Автоматическое загрузочно-разгрузочное устройство к горизонтальному поворотному столу | 1981 |
|
SU963802A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| СПОСОБ КОПИРОВАЛЬНОЙ ОБРАБОТКИ, КОПИРОВАЛЬНЫЙ ТОКАРНО-ФРЕЗЕРНЫЙ СТАНОК "КТФ-1 МЕК" | 2007 |
|
RU2368484C2 |
| Автомат для сборки | 1987 |
|
SU1428561A2 |
| НИТКОШВЕЙНАЯ МАШИНА И ЕЕ ШВЕЙНЫЙ МЕХАНИЗМ, МЕХАНИЗМ ПЕРЕНОСА НИТИ, МЕХАНИЗМ ПРОКОЛА И НИТЕПРОВОДЯЩИЙ МЕХАНИЗМ | 2004 |
|
RU2283774C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ ДЛЯ НАЛОЖЕНИЯ ЛИНЕЙНЫХ ШВОВ НА ПОЛЫЕ ОРГАНЫ | 1993 |
|
RU2088159C1 |

I
Изобретение относится к устройствам автоматики и может быть использовано, например, для управления возвратно-поступательным перемещением рабочего органа машины.
Известен механизм переключения, содержащий корпус, концевые упоры, полый стакан, установленный с возможностью качания в корпусе на оси, перпендикулярной оси стакана, в котором размещен подпружиненный тол| атель с возможностью взаимодействия с крнцевы ми упорами ll.Однако известное устройство обладает недостаточным быстродействием, так как не обеспечивает мгновенного воздействия на концевые упоры переключателя управляемого механизма.
Цель изобретения - увеличение быстродействия механизма переключения.
Поставленная цель достигается тем, что .корпус дополнительно снабжен двумя наклонными направляющими и опорной планкой для ограничения перемещения толкателя, стакан снабжен установленным в нем с возможностью взаи- , модействия с наклонными направляющими дополнительным подпружиненным штоком, который связан с возможностью ограниченного осевого перемещения с толкателем, и приводом для.перемещения стакана вдоль оси качания, а концевые упоры выполнены в виде двуплечего поворотного рычага.
to
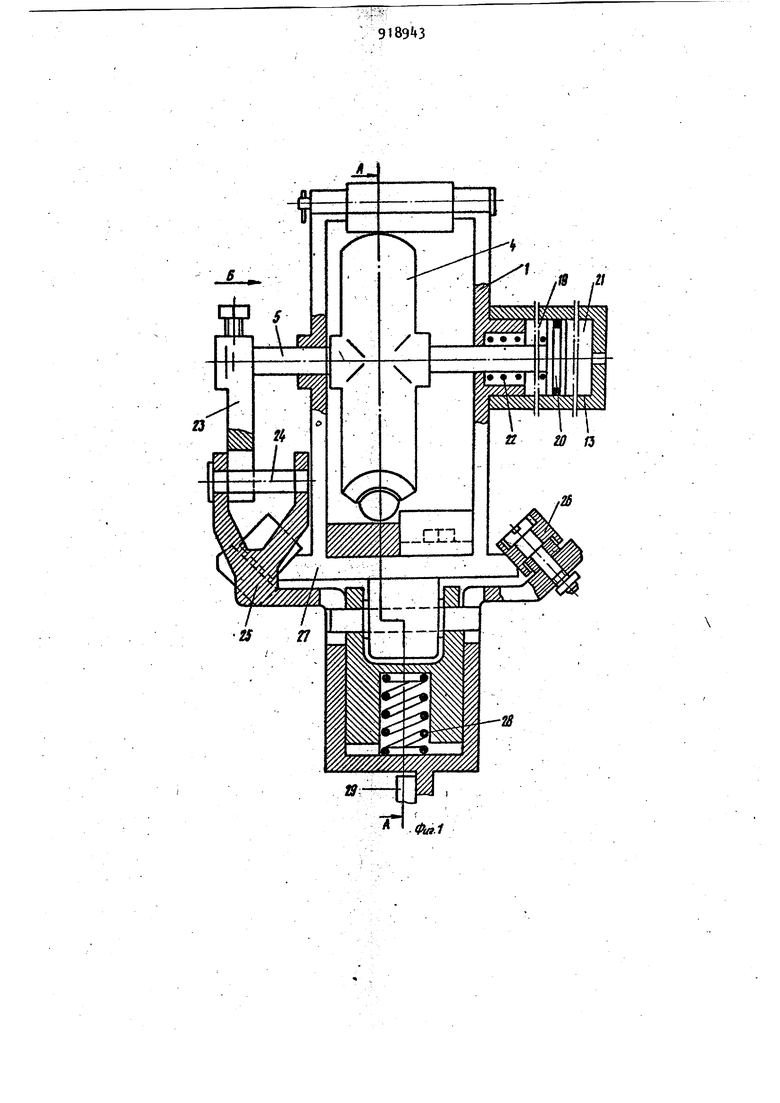
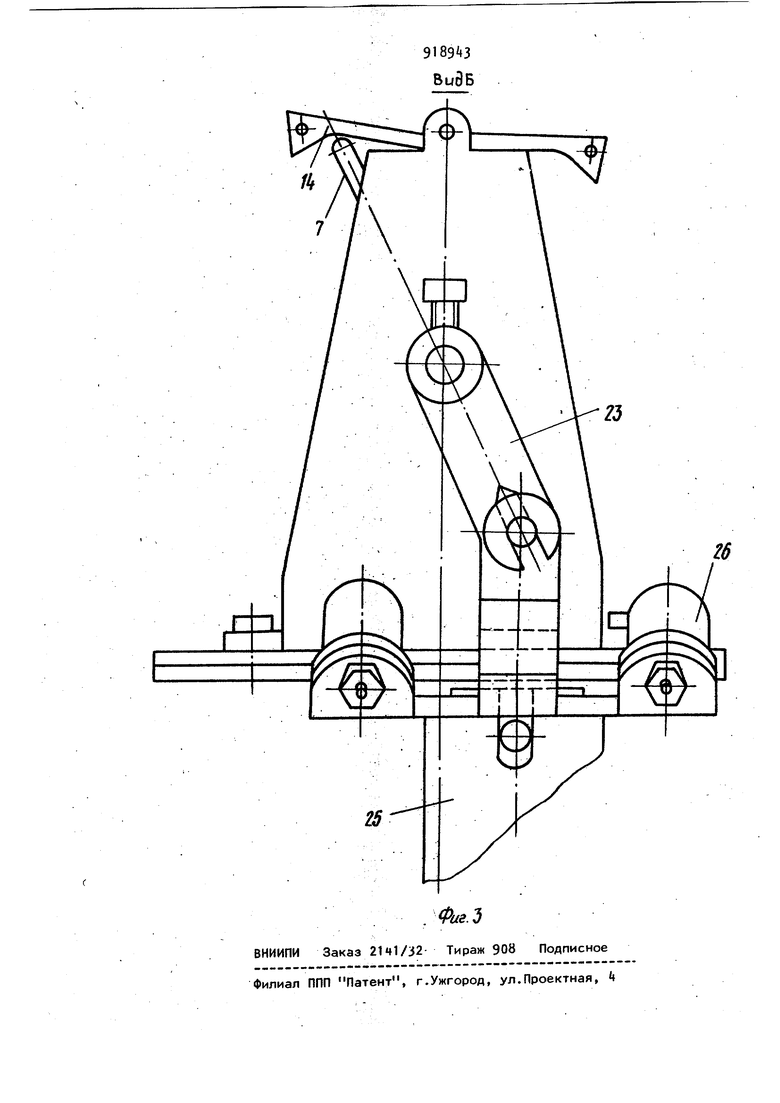
На фиг.1 изображено предлагаемое устройство, разрез по оси привода поступательного перемещения стакана; на фиг.2 -.разрез А-А на фиг,1; на фиг.З - вид -Б на фиг. 1.
IS
Механизм переключения содержит корпус 1, концевые упоры 2 и 3i полый стакан k, установленный с возможностью качания в корпусе 1 на оси 5, перпендикулярной оси стакана Ц, в котором размещен поджатый пружиной 6 толкатель 7 с возможностью взаимодействия с концевыми упорами 2 и 3. Корпус 1 дополнительно снабжен двумя на3Э
клонными направляющими 8 и 9 и опорной планкой 10 для ограничения перемещения толкателя 7, стакан k снабжен установленным в нем с возможностью взаимодействия с наклонными направляющими 8 и 9 дополнительным штоком 11 поджатым пружиной 12, который связан с возможностью ограниченного осевого перемещения с толкателем 7, и приводом 13 для перемещения стакана-f вдоль оси 5 качания, а концевые упоры 2 и 3 выполнены в виде двуплечего рычага I. Толкатель 7 выполнен в виде двух втулок 15 и 16, запрессованных одна в другую с образованием цилиндрической полости 17, в которой размещен бурт 18 штока 11. Привод 13 выполнен в виде гидроцилиндра 19,поршень 20 которого жестко установлен на оси 5, имеет командную полость 21 и поджат пружиной 22, Ось 5 рычагом 23 связана с пальцем 2А, установленным в каретке 25, снабженной роликами 2б. Ролики 26 установлены с возможностью качения по направляющей 27, являющейся частью корпуса 1, и прижаты к ней пружиной 28, отжимающей каретку 25 от корпуса 1. Каретка 25 жестко связана с рабочим органом машины 29.
Механизм переключения работает следующим образом.
По сигналу, образованному предшествующим переключением р1,гчага I, происходит отделение командной полости 21 гидроцилиндра 19 от гидролинии нагнетания и сообщение с сливом.
Пружина 22, воздействуя на пор- шень 20 , перемещает стакан k вправо (фиг.1). Шток 11 сходит с направляющей 9, вовлекая за собой буртом 18 толкатель 7. Одновременно рабочий орган 29, также переключенный предыдущим срабатыванием рычага I, и связанная с ним каретка 25 начинают перемещение влево (фиг.2), поворачивая через палец и рычаг 23 стакан , В процессе перемещения стакана k шток 11 входит в взаимодействие с
наклонной направляющей 8 и освобождает толкатель 7, который на последнем участке перемещения пружиной 6 прижат к опорной планке 10. Когда
5 толкатель 7 сходит с планки 10 он под действием пружины 6 мгновенно переключает двуплечий рычаг 1А,осуществляя тем самым реверс рабочего органа 29 и сообщая командную пот10 лость 21 гидроцилиндра 19 с гидролинией нагнетания. Механизм переключения совершает обратный ход.
Таким образом происходит автоматическое возвратно-поступательное
15 перемещение рабочегооргана, обеспечение мгновенным срабатыванием механиз1ма переключения в конце каждого хода.
Формула изобретения
Механизм переключения, содержащий корпус, концевые упоры , полый стакан,
25 установленный с возможностью качания в корпусе на оси, перпендикулярной оси стаканй, в котором размещен подпружиненный толкатель с возможностью взаимодействия с концевыми упорами,
30 отличающийся тем, что, с целью увеличения быстродействия, корпус дополнительно снабжен двумя наклонными направляющими и опорной : планкой для ограничения перемещения толкателя,- стакан снабжен установлен 5 ным в нем с возможностью взаимодействия с наклонными направляющими дополнительным подпружиненным штоком, который связан с возможностью ограниченного осевого перемещения с толкателем, и приводом для перемещения стакана вдоль оси качания, а концевые упоры выполнены в виде двуплечего поворотного рычага.
Источники информации, принять1е во внимание при экспертизе
H
.1
