Изобретение относится к машиностроению и может использоваться в конструкциях горных машин и в других областях машиностроения, где необходима блокировка движущихся частей для обеспечения безопасности персонала, работающего в зоне действия этих частей.
Известно устройство для управления горным комбайнам, включающее гидроблок, гидроцилиндры фрикционов гусеничного хода и опоры с гидрозамком, блокирующее привод гусеничного хода при опущенных опорах, что повышает надежность работы горного комбайна. (Авторское свидетельство СССР 508589, кл. Е 21 С 35/08, 1974 г.). Недостатком данного аналога является невозможность блокировки гидропривода гусеничного хода и лап питателя по предложенному принципу при установке крепи посредством гидроцилиндра крепеподъемника.
Также известна система управления горным комбайном 1ГПКС, снабженная блокировкой, обеспечивающей отключение питания всех электродвигателей, кроме электродвигателя насосной станции (См. Клорикьян С.Х. и др., Машины и оборудование для шахт и рудников. Справочник, Москва, Издательство Московского государственного горного университета, 1994, с. 252-255). Данная система управления является наиболее близким техническим решением, принятым за прототип. Недостатком такого технического решения является невозможность использования такой блокировки в горных комбайнах, оснащенных гидроприводом лап питателя и гусеничного хода.
Задачей настоящего изобретения является блокировка гидропривода лап питателя и гусеничного хода для обеспечения безопасности персонала при установке крепи посредством гидроцилиндра крепеподъемника.
Заявляемая система управления горным комбайном, содержащая электропривод исполнительных органов, гидропривод лап питателя и гусеничного хода, гидроцилиндр крепеподъемника с поршневой полостью, гидроцилиндр блокировки с пружинным возвратом штока, насосы, напор, слив, гидроблок управления гидроцилиндром крепеподъемника, двухкаскадный с входным каналам гидроблок управления гидроприводом лап питателя и гусеничного хода, дополнительно снабжена двухпозиционным с выходным каналом и полостью гидроуправления золотником-пилотом с фиксацией его рабочих положений, причем выходной канал золотника-пилота сообщен с выходным каналам двухкаскадного гидроблока управления гидроприводом лап питателя и гусеничного хода с возможностью поочередного сообщения выходного канала золотника-пилота с напором и сливом, а полость гидроуправления золотником-пилотом сообщена с гидроцилиндром блокировки и поршневой полостью гидроцилиндра крепеподъемника.
Сопоставление заявляемой системы управления горным комбайнам с прототипом позволяет сделать вывод об отсутствии в последнем признака, сходного с существенным отличительным признаком заявляемой системы управления горным комбайном - система управления горным комбайном дополнительно снабжена двухпозиционным с выходным каналом и полостью гидроуправления золотником-пилотом с фиксацией его рабочих положений, причем выходной канал золотника-пилота сообщен с входным каналом двухкаскадного гидроблока управления гидроприводом лап питателя и гусеничного хода, с возможностью поочередного сообщения выходного канала золотника пилота с напором и сливом, а полость гидроуправления золотником пилотом сообщена с гидроцилиндром блокировки и поршневой полостью гидроцилиндра крепеподъемника.
Заявляемое техническое решение имеет отличие от прототипа и не следует явным образом из изученного уровня техники, поэтому авторы считают, что объект является новым и имеет изобретательский уровень.
Изобретение имеет изобретательский уровень в связи с тем, что система управления угольным комбайном дополнительно снабжена двухпозиционным с выходным каналом и полостью гидроуправления золотником-пилотом с фиксацией его рабочих положений, причем выходной канал золотника-пилота сообщен с входным каналом двухкаскадного гидроблока управления гидроприводом лап питателя и гусеничного хода с возможностью поочередного сообщения выходного канала золотника пилота с напором и сливом, а полость гидроуправления золотником-пилотом сообщена с гидроцилиндром блокировки и поршневой полостью гидроцилиндра крепеподъемника.
При устранении этого признака исчезает технический результат. Изобретение представляет собой также определенный шаг в развитии техники и является прогрессивным, так как осуществляется блокировка гидропривода лап питателя и гусеничного хода горного комбайна для обеспечения безопасности персонала при установке крепи посредством гидроцилиндра крепеподъемника. Система управления горным комбайном, в которой заявлено данное изобретение, может найти широкое применение в горнодобывающей отрасли, также в других отраслях народного хозяйства, т.е. является технически применимым техническим решением.
Достижение технического результата системой управления горным комбайном обеспечивается тем, что она дополнительно снабжена двухпозиционным с выходным каналом и полостью гидроуправления золотником-пилотом с фиксацией его рабочих положений, причем выходной канал золотника-пилота сообщен с вводным каналом двухкаскадного гидроблока управления гидроприводом лап питателя и гусеничного хода с возможностью поочередного сообщения выходного канала золотника-пилота с напором и сливом, а полость гидроуправления золотником-пилотом сообщена с гидроцилиндром блокировки и поршневой полостью гидроцилиндра крепеподъемника.
Такая конструкция осуществляет блокировку гидропривода лап питателя и гусеничного хода для обеспечения безопасности персонала при установке крепи посредством гидроцилнндра крепеподъемника. Это достигается тем, что двухпозиционный золотник-пилот перекрывает подачу рабочей жидкости к входному каналу двухкаскадного гидроблока управления и, тем самым, к гидромоторам лап питателя и гусеничного хода при манипуляциях гидроцилиндра крепеподъемника.
Сущность заявляемого изобретения поясняется приложенным чертежом, на котором изображена схема управления горным комбайном.
Система управления горным комбайном состоит из гидропривода лап питателя 1 и гусеничного хода 2, гидроцилиндр крепеподъемника 3 с поршневой полостью 4, гидроцилиндр блокировки 5, насосов 6, 7, 8, напора 9, слива 10, гидроблока управления крепеподъемником 11, двухкаскадного гидроблока управления гидроприводом лап питателя и гусеничного хода 12 с входным каналом 13, и дополнительно снабжена золотником-пилотом 14 с выходным каналом 15 и полостью гидроуправления 16.
Работа системы управления горным комбайном осуществляется следующим образом. При включении насосов 6, 7, 8 рабочая жидкость поступает к гидроблокам 11 и 12. Если золотники распределителей этих гидроблоков находятся в нейтральном положении, жидкость беспрепятственно сливается в гидробак. При переключении одного из золотников распределителей первой ступени гидробака 12 в рабочее положение рабочая жидкость от насоса 7 формирует сигнал гидроуправления, который переключает золотник распределителя второй ступени гидроблока 12 в рабочее положение, тем самым осуществляя доступ рабочей жидкости от насоса 8 к гидроприводу лап питателя 1 или гусеничного хода 2. При включении золотника распределителя гидроблока 11 в рабочее положение жидкость от насоса 6 поступает к гидроцилиндру крепеподъемника 3. Магистраль, соединяющая поршневую полость 4 гидроцилиндра 3 с распределителем гидроблока 11 сообщена с гидроцилиндром блокировки 5 и полостью гидроуправления 16 золотника-пилота 14. При включении золотника распределителя гидроблока 11 в положение, при котором осуществляется подъем элементов крепи посредством гидроцилиндра крепеподъемника в этой магистрали происходит движение рабочей жидкости, что обуславливает подачу сигнала на срабатывание гидроцилиндра блокировки 5, отключающего питание всех электродвигателей, кроме электродвигателя насосной станции, а также подачу рабочей жидкости в полость гидроуправления 16 золотника-пилота 14, переключая его в положение, при котором выходной канал 15 золотника-пилота 14 соединяется со сливом 10, перекрывая поступление рабочей жидкости от насоса 7 к распределителям первой ступени гидроблока 12, то есть блокируется (отключается) привод лап питателя и гусеничного хода, чем достигается решение поставленной задачи по обеспечению безопасности персонала при установке крепи посредством гидроцилиндра крепеподъемника. После прекращения работы с гидроцилиндром крепеподъемника и возвращении золотника распределителя гидроблока 11 в нейтральное положение прекращается подача сигналов к гидроцилиндру блокировки 5 и в полость гидроуправления 16 золотника-пилота 14. Для возобновления работы гидропривода лап питателя 1 и гусеничного хода 2 необходимо вручную перевести золотник-пилот в положение, при котором выходной канал 15 золотника-пилота 14 соединяется с входным каналом 13 гидроблока 12, обеспечивая доступ рабочей жидкости от насоса 7 через напор 9 в систему управления приводам лап питателя и гусеничного хода.
Система управления горным комбайном за счет того, что дополнительно снабжена двухпозиционным с выходным каналом и полостью гидроуправления золотником-пилотом с фиксацией его рабочих положений и возможностью поочередного сообщения его выходного канала с напором и сливом, а полость гидроуправления золотником-пилотом сообщена с гидроцилиндром блокировки и поршневой полостью гидроцилиндра крепеподъемника, что позволяет обеспечить безопасность персонала при установке крепи посредством гидроцилиндра крепеподъемника блокировки гидропривода лап питателя и гусеничного хода, а также отключение питания всех электродвигателей, кроме электродвигателя насосной станции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ГОРНЫМ КОМБАЙНОМ | 2010 |
|
RU2445458C1 |
| Гидросистема горного комбайна | 1981 |
|
SU976097A1 |
| Устройство для управления бурильной установкой горной машины | 1980 |
|
SU939760A1 |
| УСТРОЙСТВО ДЛЯ ПРОХОДКИ ГОРНОЙ ВЫРАБОТКИ | 2001 |
|
RU2209980C1 |
| Гидропривод горной машины | 1978 |
|
SU672341A1 |
| Гидропривод ходового гусеничного устройства горной машины | 1984 |
|
SU1229335A1 |
| Закладочная машина | 1978 |
|
SU714023A1 |
| Устройство для управления горнымкомбайном | 1974 |
|
SU508589A1 |
| Двухпоточный гидропривод экскаватора | 1979 |
|
SU891869A1 |
| Навесная виброударная установка | 1980 |
|
SU926183A1 |
Изобретение относится к горному машиностроению и может быть использовано для управления горным комбайном. Система содержит электропривод исполнительных органов, гидропривод лап питателя и гусеничного хода, двухкаскадный с входным каналом гидроблок управления гидроприводом лап питателя и гусеничного хода, гидроцилиндр крепеподъемника с поршневой полостью, гидроблок управления гидроцилиндром крепеподъемника, гидроцилиндр блокировки с пружинным возвратом штока, золотник-пилот, насосы, напор, слив. Золотник-пилот выполнен двухпозиционным с выходным каналом и полостью гидроуправления с фиксацией его рабочих положений. Выходной канал золотника-пилота сообщен с входным каналом двухкаскадного гидроблока управления гидроприводом лап питателя и гусеничного хода с возможностью поочередного сообщения выходного канала золотника-пилота с напором и сливом. Полость гидроуправления золотником-пилотом сообщена с гидроцилиндром блокировки и поршневой полостью гидроцилиндра крепеподъемника. Изобретение направлено на обеспечение безопасности персонала, находящегося в зоне действия движущихся частей комбайна. 1 ил.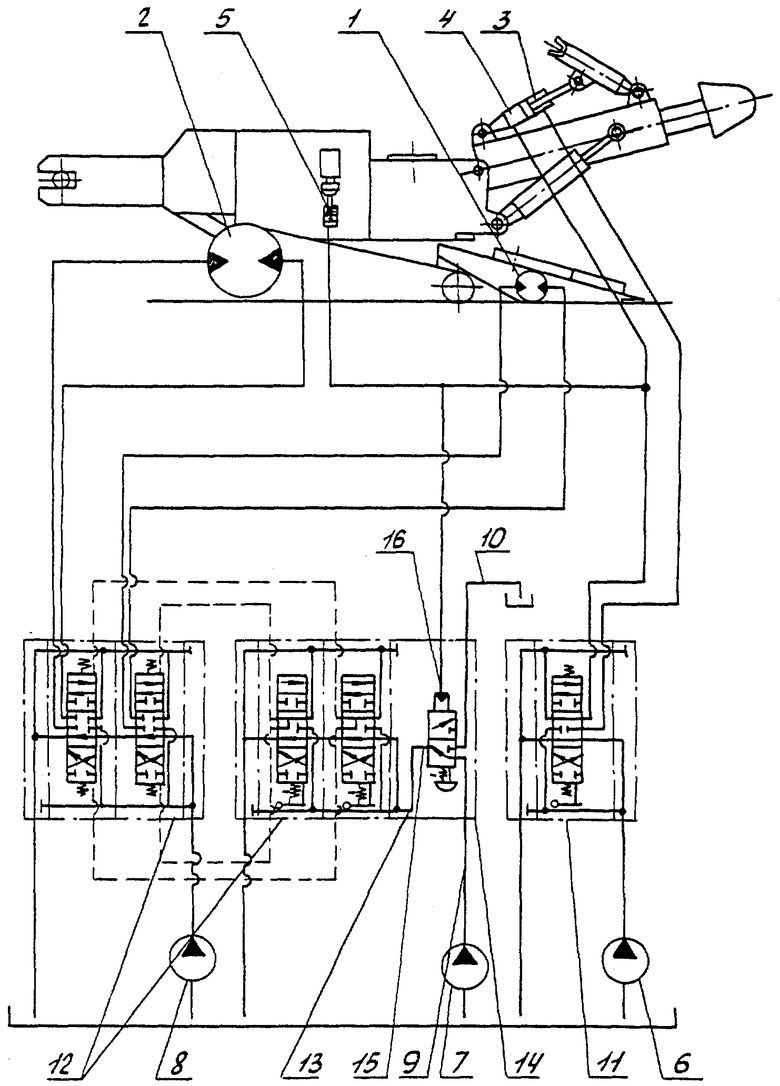
Система управления горным комбайнам, содержащая электропривод исполнительных органов, гидропривод лап питателя и гусеничного хода, гидроцилиндр крепеподъемника с поршневой полостью, гидроцилиндр блокировки с пружинным возвратом штока, насосы, напор, слив, гидроблок управления гидроцилиндром крепеподъемника, двухкаскадный с входным каналом гидроблок управления гидроприводом лап питателя и гусеничного хода, отличающаяся тем, что система управления горным комбайном дополнительно снабжена двухпозиционным с выходным каналом и полостью гидроуправления золотником-пилотом с фиксацией его рабочих положений, причем выходной канал золотника-пилота сообщен с входным каналом двухкаскадного гидроблока управления гидроприводом лап питателя и гусеничного хода с возможностью поочередного сообщения выходного канала золотника-пилота с напором и сливом, а полость гидроуправления золотником-пилотом сообщена с гидроцилиндром блокировки и поршневой полостью гидроцилиндра крепеподъемника.
| КЛОРИКЬЯН С.Х | |||
| И ДР | |||
| Машины и оборудование для шахт и рудников | |||
| Справочник | |||
| М.: Издательство Московского государственного горного университета, 1994, с | |||
| Телефонно-трансляционное устройство | 1921 |
|
SU252A1 |

