Предлагаемое изобретение датчика скорости автомобиля (ДСА) относится к автомобильному электронному приборостроению и может быть непосредственно использовано как для измерения линейной скорости автомобиля, так и для измерения угловой скорости (частоты вращения) большого числа ферромагнитных зубчатых роторов, линейных и угловых перемещений (положений) других зубчатых механизмов и вращающихся валов в автомобильной, легкой и тяжелой промышленности.
Известно устройство для определения частоты вращения ферромагнитного зубчатого ротора, включающее источник магнитного поля, датчик на основе соединенных по мостовой схеме четырех тонкопленочных магниторезисторов, расположенных на диэлектрической подложке, зубчатый ротор из ферромагнитного материала, блок усиления и формирования выходного сигнала, предназначенное для измерения скорости вращения колес в антиблокировочных системах автомобилей и для определения положения коленчатого вала в системах управления двигателем. (Патент РФ №95115995/28, МПК G 01 P 3/488 от 1995.09.13).
Недостатками данного устройства являются отсутствие совместимости выходного сигнала с требованиями большинства современных систем измерения линейной скорости автомобиля (спидометров, контроллеров впрыска, маршрутных компьютеров), усложненная конструкция, малая степень интегральности компонентов магниторезистивного датчика, электронных схем формирования импульсов, питания и защиты, ограниченный диапазон рабочего воздушного зазора.
Известен бесконтактный датчик скорости автомобиля, предназначенный для измерения угловой скорости зубчатого ротора, применяющий магнитопровод в составе магниточувствительного элемента на основе дифференциальной интегральной схемы (ИС) Холла для получения скважности, близкой к двум. (Решение от 14.10.2003 о выдаче патента на полезную модель РФ по заявке №2003127267/20(029190) от 08.09.2003, МПК 7 G 01 Р 3/488).
Недостатками данного устройства являются необходимость компромисса между помехоустойчивостью и точностью выходного сигнала (скважностью) и величиной максимального рабочего воздушного зазора, связанная с использованием эффекта Холла (в частности, с применением магнитопровода и дифференциальной ИС), принципиально ограниченный для эффекта Холла диапазон измеряемых частот.
Задачи изобретения - повышение надежности и точности бесконтактных ДСА, измеряющих угловую скорость вращения ферромагнитного зубчатого ротора, функционирующих в условиях значительных статических и динамических смещений рабочей магнитной области, увеличение диапазона рабочего воздушного зазора, расширение измеряемого частотного диапазона, повышение интегральности и миниатюризация конструкции устройства.
Поставленные задачи решаются тем, что в бесконтактном ДСА, измеряющем угловую скорость ферромагнитного зубчатого ротора, состоящем из зубчатого ротора, совокупности механических и электронных компонентов ДСА, заключенных в пластмассовый корпус ДСА, включающей магниточувствительный элемент в пластмассовом корпусе, оплавленном на расположенной в пазах корпуса ДСА печатной плате с размещенной на ней электронной схемой обработки сигнала, магниточувствительный элемент представляет собой интегральный магниторезистивный модуль, состоящий из интегральной схемы (ИС) магниторезистора, постоянного магнита для обратного смещения и стабилизации магниторезистивного эффекта, ИС обработки магниторезистивного сигнала, конструкция пластмассового корпуса магниторезистивного модуля, пластмассового корпуса ДСА и геометрические размеры ротора обеспечивают симметричный относительно чувствительной области монтаж магниторезистивного модуля коаксиально заданной диаметральной оси ротора, причем относительно центральной оси симметрии корпуса ДСА монтаж магниторезистивного модуля может быть выполнен под любым углом от 0° (аксиальное исполнение ДСА) до 90° (радиальное исполнение ДСА).
В общем случае для совместимости с существующими схемами последующей обработки частотного сигнала fДСА ДСА в автомобильных системах контроля и управления электронная схема обработки сигнала ДСА, размещаемая на плате, реализует схему деления частоты fИС импульсного сигнала с выхода магниторезистивного модуля, кратной заданному целому коэффициенту деления Кд=fИС/fДСА (число Кд≥1), обеспечивает выход ДСА с втекающим через внешнее сопротивление током, и включает, при Кд>1, кроме ИС обработки магниторезистивного сигнала в составе магниторезистивного модуля, ИС делителя частоты (счетчика), резистор, включенный между «плюсом» питания и выходом с открытым коллектором магниторезистивного модуля для прохождения импульсного сигнала на стробирующий вход ИС делителя частоты, транзистор, обеспечивающий выход схемы ДСА с открытым коллектором, схемы защиты от перенапряжений, напряжения обратной полярности, импульсных помех по цепям питания, дополнительный фильтр низких частот, а также стандартные схемы преобразования в выход с открытым коллектором токового интерфейса двухпроводного магниторезистивного модуля, если используется таковой.
В частном случае, когда требованиям совместимости соответствует коэффициент деления частоты Кд, равный единице, в схеме обработки сигнала ДСА исключаются ИС делителя частоты, резистор, обеспечивающий прохождение сигнала с выхода ИС магниторезистивного модуля на вход ИС счетчика, выходной транзистор.
Заявляемый ДСА показан на фиг.1, 2, 3, 4, 5, 6, 7.
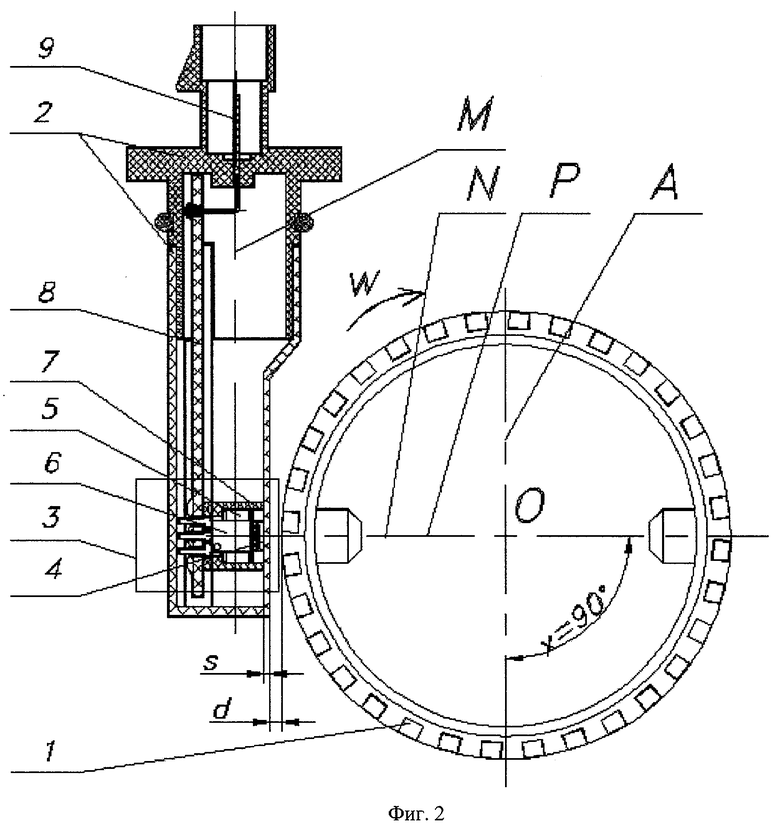
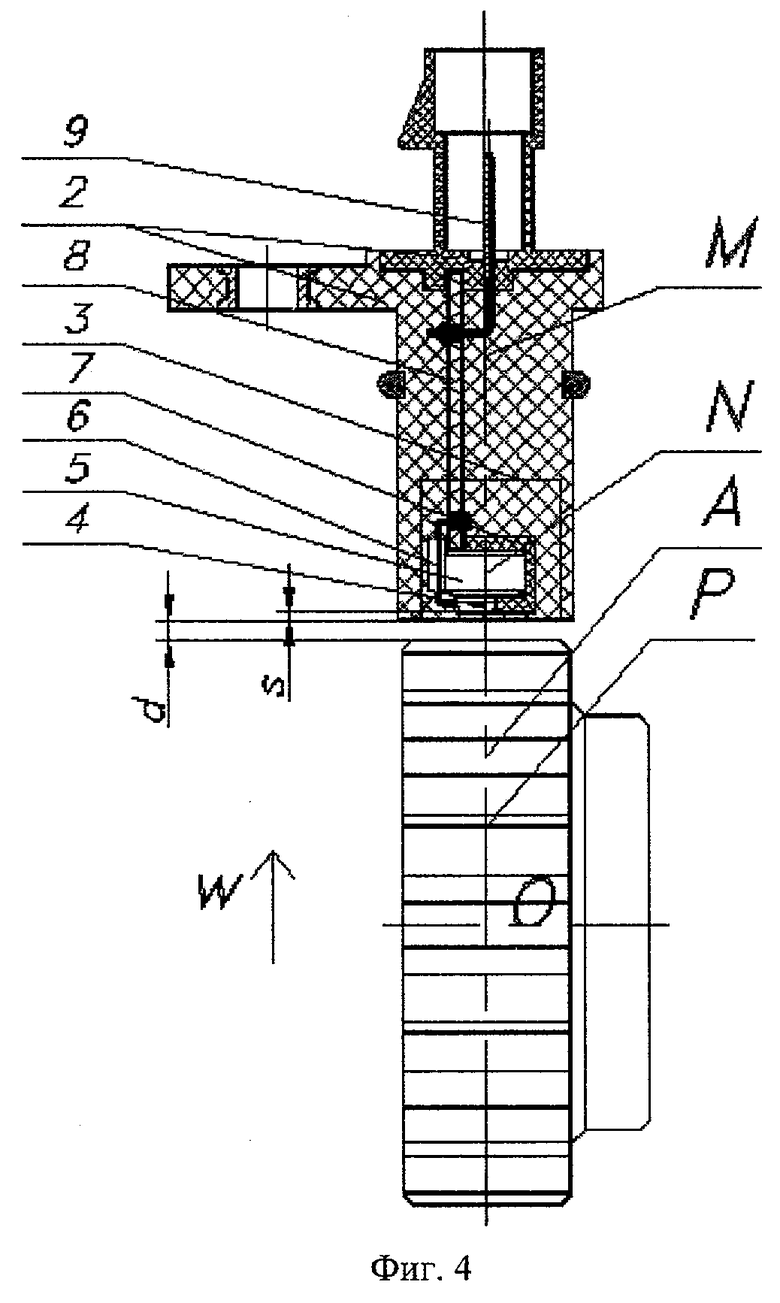
На фиг.1 и 4 показаны варианты аксиального исполнения ДСА, на фиг.2 - пример радиального исполнения ДСА, на фиг.3 - пример оптимального варианта симметричного монтажа магниторезистивного модуля под острым углом х относительно оси симметрии корпуса ДСА радиального исполнения, на фиг.4 - пример ДСА, изготовленного способом обливки пластмассой при изготовлении корпуса, на фиг.5, 6, 7 - варианты реализации схемы обработки сигнала ДСА.
ДСА состоит из ферромагнитного зубчатого ротора 1, корпуса бесконтактного датчика 2, магниточувствительного элемента 3, включающего ИС магниторезистора 4, постоянный магнит 5 для обратного смещения и стабилизации магниторезистивного эффекта, ИС 6 обработки сигнала магниторезистивного элемента, образующих интегральный магниторезистивный модуль, заключенный в пластмассовый корпус 7, печатной платы 8, контактов 9. Выводы ИС 6 запаяны на плате 8, корпус 7 жестко установлен (оплавлен) на плате 8. Контакты 9 запрессованы в корпусе 2 и запаяны на плате 8.
Интегральный магниторезистивный модуль 3 жестко установлен в пластмассовом корпусе 7 (запрессован и вклеен) симметрично его оси симметрии ON, перпендикулярной плоскости чувствительного элемента ИС 4 магниторезистора, коаксиально диаметральной оси ОР ротора 1, соответствующей на фиг.1, 2, 3, 4 разделению между зубом и слотом ротора 1, с оптимальным углом х симметричной вдоль оси ON установки магниторезистивного модуля 3 относительно оси М симметрии корпуса 2 ДСА от х=0° (соответствует аксиальному исполнению ДСА, когда ось М коаксиальна оси ОА) до х=90° (радиальное исполнение ДСА, когда ось М не коаксиальна ни одной оси ОА), который обеспечивается конструктивно геометрией корпуса 7, корпуса 2, ротора 1.
Расположение платы 8 относительно оси симметрии М ДСА определяется геометрией корпуса 2, требованиями к механическим размерам контактов 9, существующими технологическими решениями для размещения элементов электронной схемы обработки сигнала ДСА. (На фиг.1 показаны два возможных варианта размещения платы 8 для аксиального исполнения корпуса 2 ДСА).
Технология изготовления ДСА допускает как поэтапную сборку механических компонентов в одну или несколько механических частей корпуса 2 ДСА, как в ДСА, показанных на фиг.1, 2, 3, так и применение технологии обливки пластмассой электронного блока с полностью выполненными электрическими соединениями (фиг.4).
ДСА функционирует следующим образом.
При вращении зубчатого ротора 1, установленного на выходном валу коробки передач автомобиля, переходы зуб - слот формируют на выходе ИС 6 последовательность импульсов напряжения. Частота выходных импульсов fИС пропорциональна: частоте вращения ротора F, количеству зубьев ротора К и линейной скорости автомобиля vавт
где F - частота вращения ротора, Гц,
F0 - коэффициент пропорциональности, или частота вращения ротора при скорости автомобиля 1 м/с, м-1;
vавт - скорость автомобиля, м/с.
Функциональность заявляемого ДСА в составе конкретного автомобиля обеспечивается выбранным соотношением числа зубьев ротора К с последующим пересчетом частотного сигнала fИС (делением на целое число Кд) в схеме обработки сигнала ДСА

где fДСА - выходной сигнал ДСА, Гц.
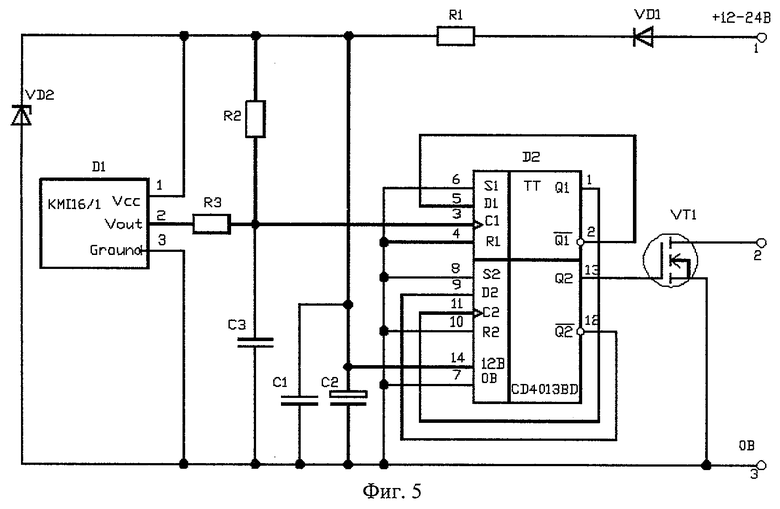
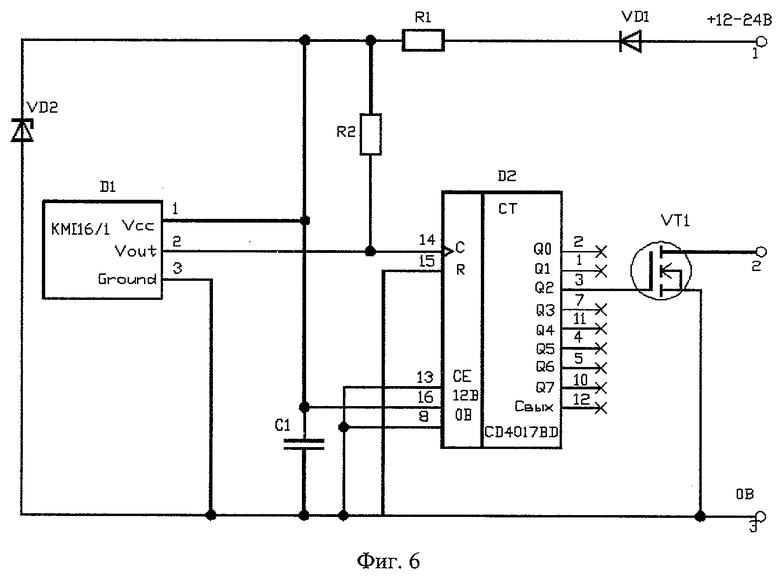
Конкретные примеры реализации схемы обработки сигнала ДСА приведены на фиг.5, 6, 7.
ДСА, показанный на фиг.5, имеет трехпроводную электрическую схему подключения напряжения питания и сопротивления нагрузки: 1 - «плюс» напряжения питания, 2 - выход с втекающим током через внешнее сопротивление (открытый коллектор), 3 - «минус» питания (общий провод). Номинальное напряжение питания - 12 В постоянного тока.
Выходной импульсный сигнал напряжения с вывода 2 трехпроводной ИС обработки сигнала D1 в составе магниторезистивного модуля типа KMI16/1 Philips подается на стробирующий вход ИС D2 счетчика типа CD4013BD Fairchild, реализующего схему деления частоты сигнала на четыре, при помощи включенного между «плюсом» питания и выходом магниторезистивного сенсора D1 параллельного резистора R2, имеющего сопротивление порядка 1,2÷2,5 кОМ (до 20 кОМ). Выход ДСА с открытым стоком обеспечивает транзистор VT1 (типа BST82 Philips).
Для защиты от повышенного напряжения питания в схему включен параллельный стабилизатор - стабилитрон VD2 (типа BZX84-C15 Philips) с резистором R1 (сопротивление порядка 7-10 кОм), для защиты от напряжений обратной полярности применяется выпрямительный диод VD1 типа BYD17D Philips. Конденсатор С1 (емкостью порядка 50÷100 нФ) предназначен для защиты схемы ДСА от импульсных помех по цепям питания. Электролитический конденсатор С2 емкостью порядка 100÷220 мкФ запасает энергию для питания ДСА при кратковременных перерывах подачи питания в присутствии импульсов обратной полярности по цепям питания ДСА. Для снижения электромагнитных помех в схему ДСА добавлен фильтр низких частот, состоящий из резистора R3 и конденсатора С3, определяющий верхнюю частоту среза.(Например, сопротивление R3=4,7 кОМ и емкость С3=4,7 нФ задают верхнюю частоту среза порядка 10 кГц.).
Все элементы схемы электрической принципиальной рассчитаны на диапазон рабочих температур внутри коробки передач (-40°С÷+150°С). Напряжение выходного сигнала высокого уровня составляет 12 В, скважность Q выхода ДСА равна 2÷2,25.
ДСА, показанный на фиг.6, соответствует Кд=3, отличается от варианта, описанного выше, применением ИС делителя частоты типа CD4017 BD Fairchild, включенного в схему деления на три, отсутствием конденсатора С2 и фильтра низких частот на основе элементов R3 и С3.
ДСА, показанный на фиг.7, соответствует Кд=1, отличается от двух предыдущих вариантов отсутствием ИС делителя частоты, резистора, обеспечивающего прохождение сигнала с выхода ИС магниторезистивного модуля на вход ИС счетчика, выходного транзистора.
В таблице приведены сравнительные технические данные, характеризующие функционирование магниточувствительных элементов на основе дифференциальных ИС Холла и интегрального магниторезистивного модуля KMI16/1 Philips, включенных по упрощенной схеме (без триггера), аналогично показанной на фиг.7, в паре с двумя роторами различной геометрии (для дифференциальных ИС Холла измерения и расчеты выполнены без применения специальных механических способов оптимизации скважности выходного сигнала).
параметрами: модуль m=4,83 мм, число зубьев K=12, диаметр D=58 мм (показанная на рисунках), и ротора Б с параметрами: m=2,25 мм, К=32, D=72 мм (отличающиеся данные таблицы для ротора Б приведены в скобках)

Как видно из таблицы, заявляемый ДСА имеет повышенную точность и надежность измерений, увеличенный диапазон рабочего воздушного зазора d, увеличенный диапазон рабочих температур, расширенный диапазон измеряемых частот.
Заявляемый ДСА отличается тем, что имеет совокупность признаков, включающую перечисленные выше признаки (увеличенный рабочий воздушный зазор, увеличенный диапазон рабочих температур (до 190°С), расширенный частотный диапазон, возможность измерения скоростей, близких к нулевой), а также повышенную устойчивость к механическим вибрациям, ударам, внешним электромагнитным помехам, малую пьезочувствительность, что достигается за счет применения в качестве магниточувствительного элемента интегрального магниторезистивного модуля типа KMI16/1 Philips и его симметричного монтажа на плате ДСА в корпусе специальной конструкции коаксиально заданной диаметральной оси ротора, допускающего установку относительно центральной оси симметрии корпуса ДСА под углом х=0°÷90°, определяемым из соображений механической оптимизации.
Большинство названных преимуществ, обеспечиваемых за счет применения интегрального магниторезистивного модуля, объясняются базовыми свойствами магниторезистивного эффекта:
- высокая чувствительность порядка 20 мВ/кА/м (более чем в 10 раз выше по сравнению с эффектом Холла, имеющим чувствительность порядка 0,4÷0,7 мВ/кА/м);
обеспечивает большие значения рабочего воздушного зазора (1,5÷2,9 мм) между ДСА и ротором;
- сильный первичный сигнал делает сенсорную систему более нечувствительной к возмущениям, устойчивой к механической вибрации, внешним электромагнитным помехам;
- расширенный рабочий температурный диапазон (-40°С÷+150°С), в области чувствительного элемента на основе пермаллоевого материала (20% Fe, 80% Ni), допускаются температуры до 190°С;
- расширенный диапазон измеряемых частот следования зубьев (0-25 кГц), с образованием сигнала на малых скоростях практически до нуля вниз;
- малая чувствительность к механическим воздействиям (в том числе удару) в сравнении с эффектом Холла, вследствие малого пьезорезистивного эффекта в пермаллоевом материале чувствительного элемента.
Важнейшие показатели функционирования ДСА - диапазон измеряемых частот вращения ротора и гарантированный рабочий воздушный зазор dг между корпусом ДСА и ротором, в значительной степени также определяются геометрией ротора. Увеличение рабочего воздушного зазора d может быть достигнуто за счет применения роторов с увеличенным значением модуля m, но в этом случае необходимо минимизировать нежелательное увеличение ферромагнитной массы, способствующее наведению паразитных вихревых токов при вращении ротора.
В том случае, если большой воздушный зазор не требуется, применение интегрального магниторезистивного модуля позволяет увеличить допуски рабочего зазора при инсталляции ДСА. Следует отметить, что имеющиеся допуски крепления магниточувствительного элемента ухудшают скважность при использовании любого эффекта (Холла или магниторезистивного), поэтому в любом случае их не следует значительно увеличивать.
Таким образом, для получения увеличенных значений зазора d и скважности Q, близкой к двум, необходимо уделять специальное внимание обеспечению требуемых допусков монтажа магниторезистивного элемента относительно ротора. В заявляемом ДСА минимальные погрешности крепления для получения скважности Q=2÷2,25 (близкой к двум), обеспечиваются конструктивно геометрией корпуса 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНЫЙ ДАТЧИК СКОРОСТИ АВТОМОБИЛЯ | 2004 |
|
RU2270452C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ | 1995 |
|
RU2115932C1 |
| Бесконтактный истинно двухосевой датчик угла поворота вала | 2014 |
|
RU2615612C2 |
| БЕСКОНТАКТНЫЙ ПРОГРАММИРУЕМЫЙ ДАТЧИК АБСОЛЮТНОГО УГЛОВОГО ПОЛОЖЕНИЯ В 360° | 2006 |
|
RU2312363C1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК ПОЛОЖЕНИЯ ДРОССЕЛЬНОЙ ЗАСЛОНКИ | 2005 |
|
RU2298148C2 |
| Датчик скорости автомобиля и способ его изготовления | 2022 |
|
RU2802923C1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК ПОЛОЖЕНИЯ ПЕДАЛИ | 2005 |
|
RU2301399C2 |
| ПРОГРАММИРУЕМЫЙ БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ С ЛИНЕЙНЫМ УГЛОВЫМ ДИАПАЗОНОМ В ПРЕДЕЛАХ 360° | 2006 |
|
RU2317522C2 |
| ОБНАРУЖИТЕЛЬ ОБЪЕКТОВ ВНУТРИ ТРУБОПРОВОДОВ | 2001 |
|
RU2181460C1 |
| МАГНИТНЫЙ ИНТРОСКОП ДЛЯ КОНТРОЛЯ ТРУБОПРОВОДОВ БЕЗ ВСКРЫТИЯ ГРУНТА | 2000 |
|
RU2187100C2 |


Изобретение относится к автомобильному электронному приборостроению. Бесконтактный датчик скорости автомобиля (ДСА) измеряет угловую скорость (частоту вращения) ферромагнитного зубчатого ротора. В качестве чувствительного элемента используется интегральный магниторезистивный модуль типа KMI16/1 Philips, симметричный монтаж которого относительно заданной диаметральной оси ротора в корпусе ДСА обеспечивается конструктивно. Для совместимости с внешними схемами обработки сигнала в ДСА используется схема деления частоты импульсного сигнала. Увеличение рабочего воздушного зазора, расширение рабочего частотного диапазона, с возможностью измерения скоростей, практически близких к нулевой, высокотемпературная стабильность и помехоустойчивость выходного сигнала ДСА обеспечиваются за счет базовых свойств магниторезистивного эффекта, имеющего высокую чувствительность (порядка 20 мВ/кА/м, что более чем в 10 раз выше по сравнению с эффектом Холла). Оптимальные функциональные характеристики ДСА достигаются при совместном применении предложенных конструктивных и схемотехнических средств. 1 з.п. ф-лы. 7 ил., 1 табл.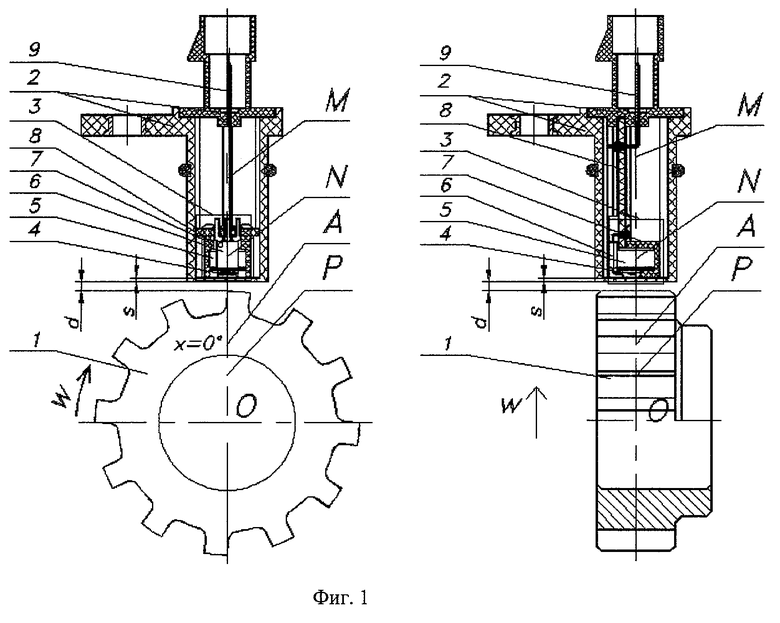
| Прибор для демонстрирования гидростатических свойств жидкостей | 1933 |
|
SU35441A1 |
| US 6522131 B1, 18.02.2003 | |||
| US 5210493 А, 11.05.1993 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ | 1995 |
|
RU2115932C1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1998 |
|
RU2212087C2 |

