Изобретение относится к области обработки металлов резанием, а именно к конструкции узлов токарных, фрезерных и расточных станков.
Известна многопозиционная инструментальная головка, содержащая корпус, инструментальный диск, имеющий возможность поворота относительно корпуса, инструментальные блоки, установленные на инструментальном диске, электродвигатель, имеющий возможность попеременного соединения с кинематической цепью поворота инструментального диска и с кинематической цепью вращения шпинделя одного из инструментальных блоков, гидроцилиндр для соединения электродвигателя с кинематической цепью поворота инструментального диска, датчик обратной связи для контроля углового положения инструментального диска (см. RU 2071870, В 23 В 29/32, 1997).
Недостатком известной многопозиционной инструментальной головки являются значительные габариты, ограничивающие технологические возможности ее применения в составе станка, а также недостаточная точность базирования инструментального диска, что обусловлено низкой жесткостью базовых элементов.
Задача изобретения состоит в расширении технологических возможностей многопозиционной инструментальной головки посредством уменьшения ее габаритов и обеспечения тем самым расширения области ее применения.
Задача изобретения состоит также в повышении точности базирования инструментального диска за счет повышения жесткости базовых элементов.
Поставленная задача решается тем, что многопозиционная инструментальная головка содержит корпус, инструментальный диск, имеющий возможность поворота относительно корпуса, инструментальные блоки, установленные на инструментальном диске, электродвигатель, имеющий возможность попеременного соединения с кинематической цепью поворота инструментального диска и с кинематической цепью вращения шпинделя одного из инструментальных блоков, гидроцилиндр для соединения электродвигателя с кинематической цепью поворота инструментального диска, датчик обратной связи для контроля углового положения инструментального диска, причем для уменьшения габаритов инструментальная головка снабжена плавающими фиксаторами положения инструментального диска относительно корпуса, гидроцилиндрами для отвода плавающих фиксаторов и гидроцилиндром для соединения электродвигателя с кинематической цепью вращения шпинделя одного из инструментальных блоков, при этом ротор электродвигателя целесообразно расположить соосно с осью вращения инструментального диска.
Для повышения точности базирования инструментального диска головка снабжена перекрестно-роликовым подшипником, наружное кольцо которого состоит из двух жестко соединенных частей, имеет торцовые зубья для взаимодействия с упомянутыми плавающими фиксаторами и жестко соединено с корпусом, а внутреннее кольцо соединено с инструментальным диском и имеет зубчатый венец, входящий в кинематическую цепь поворота инструментального диска, а также торцовые зубья для взаимодействия с упомянутыми плавающими фиксаторами.
Изобретение представлено на фиг.1-3, где:
на фиг.1 показана кинематическая схема многопозиционной инструментальной головки с гидроцилиндром и зубчатой муфтой в двух положениях-поворота головки и для передачи вращения инструменту;
на фиг.2 показано продольное сечение многопозиционной инструментальной головки по оси поворота инструментального диска;
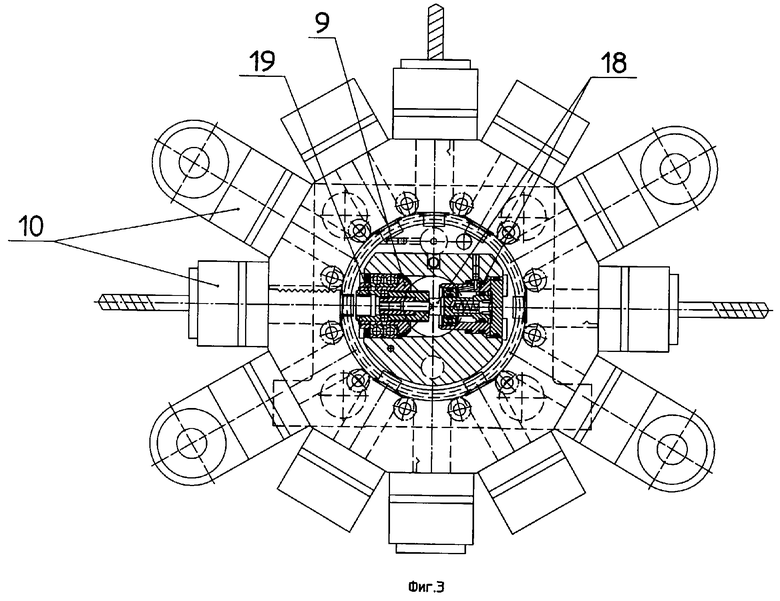
на фиг.3 показан вид спереди на многопозиционную инструментальную головку (с частичным разрезом).
Электродвигатель (М) поз.1 (см. фиг.1) имеет возможность соединения попеременно с двумя кинематическими цепями: движения вращения шпинделя одного из инструментальных блоков и движения поворота инструментального диска.
В кинематической цепи вращения шпинделя инструментального блока движение от электродвигателя 1 через зубчатые колеса 2, 3, 4, 5, 9 и 10 передается на муфту 12, управляемую гидроцилиндром 13. Зубчатая муфта 11, управляемая гидроцилиндром 14, должна находиться в такой позиции, при которой зубчатые колеса 5 и 6 расфиксированы.
Движение на поворот инструментального диска передается от электродвигателя 1 через зубчатые колеса 6 и 7 на зубчатый венец 8 внутреннего зацепления, соединенный с инструментальным диском.
Зубчатая муфта 12 при движении поворота инструментального диска должна находиться в расфиксированном положении. Угловое положение инструментального диска и его соответствие рабочим позициям контролируется датчиком обратной связи 15.
В корпусе 16 многопозиционной инструментальной головки (далее - головка) установлен синхронный электродвигатель 1, ротор которого передает вращательное движение через вал 17 и зубчатые колеса на исполнительные органы головки (см. фиг.2, 3), при этом ротор установлен соосно с осью вращения инструментального диска.
Перекрестно-роликовый подшипник 18 своим наружным кольцом 19 (выполненным конструктивно из двух частей) жестко соединен с корпусом головки. Внутреннее кольцо 20 подшипника жестко соединено с инструментальным диском 21 и инструментальными блоками 22, несущими режущий инструмент, и имеет зубчатый венец 8 внутреннего зацепления, входящий в кинематическую цепь поворота инструментального диска.
Наружное кольцо 19 подшипника 18 и одна часть 23 его внутреннего сдвоенного кольца выполнены с торцовыми зубьями для фиксации углового положения инструментального диска плавающими фиксаторами 24 (например, расположенными аксиально) под действием пружин 25. Гидроцилиндр 26 обеспечивает управление приводом поворота головки.
Вращение на шпиндель инструментального блока 22 передается через конические зубчатые колеса 27, 28 с круговыми зубьями.
Головка работает следующим образом.
В исходном положении инструментальный диск головки находится в рабочей позиции, торцовые зубья подшипника зафиксированы фиксатором, обе зубчатые муфты - в разомкнутом состоянии.
При повороте инструментального диска на требуемую позицию в рабочую полость гидроцилиндров 26 подается давление, их поршни выводят из зацепления фиксаторы 24, разблокируя наружное и внутреннее кольца подшипника 18. Одновременно поршень гидроцилиндра (для включения электродвигателя в кинематическую цепь поворота инструментального диска) перемещает соответствующую зубчатую муфту вправо и замыкает кинематическую цепь на поворот инструментального диска. Ротор электродвигателя поворачивает его в требуемое угловое положение, которое контролируется датчиком обратной связи 15. При этом схема управления головки обеспечивает одновременность включения соответствующих гидроцилиндров и расфиксацию подшипника.
Затем в полостях гидроцилиндров 26 сбрасывается давление, и под действием пружин 25 фиксаторы 24 блокируют внутреннее поворотное кольцо подшипника относительно его наружного кольца. Поршень гидроцилиндра перемещает зубчатую муфту влево, размыкая кинематическую цепь поворота инструментального диска. Ротор электродвигателя возвращается в исходное положение по датчику обратной связи. Однако при необходимости в полости цилиндра со стороны пружины может быть подано давление, что повышает усилие воздействия.
Для передачи вращения на режущий инструмент в рабочую полость гидроцилиндра 18 для соединения электродвигателя с кинематической цепью вращения шпинделя одного из инструментальных блоков подается давление. Его поршень перемещает муфту 19 влево до замыкания с хвостовиком шпинделя инструментального блока, на который передается вращение через конические зубчатые колеса 27, 28.
По окончании цикла обработки ротор двигателя устанавливается в исходное положение по датчику обратной связи. Муфта 19 выводится из зацепления с хвостовиком шпинделя инструментального блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОПОЗИЦИОННАЯ ИНСТРУМЕНТАЛЬНАЯ ГОЛОВКА | 1992 |
|
RU2071870C1 |
| Токарный многооперационный станок | 1989 |
|
SU1713747A1 |
| Вертикальный многошпиндельный станок | 1990 |
|
SU1722701A1 |
| Рабочий ротор | 1990 |
|
SU1756115A2 |
| Многопозиционная инструментальная головка | 1990 |
|
SU1787696A1 |
| Револьверная головка | 1990 |
|
SU1787697A1 |
| Револьверная головка | 1989 |
|
SU1683881A1 |
| Многопозиционный автомат для обработки изделий типа корпуса наручных часов | 1957 |
|
SU117374A1 |
| Зубошлифовальный станок для конических колес с круговыми зубьями | 1974 |
|
SU518287A1 |
| Револьверная головка | 1986 |
|
SU1323245A1 |

Изобретение относится к области обработки металлов резанием, а именно к конструкции узлов токарных, фрезерных и расточных станков. Сущность изобретения заключается в том, что многопозиционная инструментальная головка снабжена плавающими фиксаторами положения инструментального диска относительно корпуса, гидроцилиндрами для отвода плавающих фиксаторов и гидроцилиндром для соединения электродвигателя с кинематической цепью вращения шпинделя одного из инструментальных блоков. Кроме того, она снабжена перекрестно-роликовым подшипником, внутреннее кольцо которого имеет торцовые зубья для взаимодействия с упомянутыми плавающими фиксаторами и жестко соединено с корпусом, а наружное кольцо состоит из двух жестко соединенных частей, одна из которых жестко соединена с инструментальным диском и имеет зубчатый венец, входящий в кинематическую цепь поворота инструментального диска, а вторая имеет торцовые зубья для взаимодействия с упомянутыми фиксаторами. Технический результат изобретения состоит в повышении точности базирования инструментального диска. 1 з.п. ф-лы. 3 ил.
| МНОГОПОЗИЦИОННАЯ ИНСТРУМЕНТАЛЬНАЯ ГОЛОВКА | 1992 |
|
RU2071870C1 |
| РЕВОЛЬВЕРНАЯ ГОЛОВКА | 1989 |
|
RU2077412C1 |
| Револьверная головка | 1984 |
|
SU1196155A1 |
| DE 3904631 A1, 23.08.1990. | |||

