Изобретение относится к авиационной технике, в частности к области электрогидравлических силовых приводов, предназначенных для электродистанционных систем управления рулевыми поверхностями летательных аппаратов.
Цель изобретения улучшение динамических характеристик в области малых входных сигналов управления, снижение веса и уменьшение габаритов.
На чертеже изображен электрогидравлический силовой привод.
Привод содержит 4-канальную рулевую машину 1 с жестким соединением выходных звеньев каналов, распределительные золотники 2, датчики обратной связи 3, двухкамерный силовой гидроцилиндр 4, датчик обратной связи 5, гидролинии нагнетания 6 и 7 и слива 8 и 9.
Управляющие блоки 10 рулевой машины 1 установлены на корпусе 11, в котором расположены гидродвигатели 12 поступательного действия. Управляющие блоки 10 гидравлически связаны с линиями нагнетания 6 и 7 и слива 8 и 9 попарно от каждой из двух систем гидропитания, а через линии 13 и 14- с соответствующими полостями гидродвигателя 12.
Распределительные золотники 2 установлены соосно с гидродвигателями 12 в корпусе 11, который является распределительной гильзой распределительных золотников 2, и соединены гидравлически с полостями силового гидроцилиндра 4.
Гидродвигатель 12 каждого канала рулевой машины 1 включает в себя поршень 15, имеющий уплотнительное резиновое кольцо 16, расположенное в уплотнительной канавке 17. Управляющие полости 18 и 19 поршней 15 выполнены дифференциальными и образованы самим поршнем 15 и штоками разных диаметров 20 и 21. При этом поршни 15 соседних каналов рулевой машины 1 соединены единым штоком 20 через разделительную герметизированную втулку 22.
Работает привод следующим образом.
При подаче сигналов управления в управляющие блоки 10 рулевой машины распределительные золотники 2 скачкообразно с нейтрального положения переместятся на величину хода, прямо пропорциональную величине сигнала управления и обратно пропорциональную крутизне датчиков обратной связи 3.
При перемещении распределительных золотников 2, рабочая жидкость подается к полостям силового гидроцилиндра 4. Так как привод охвачен внутренней и внешней связью, то с момента начала движения поршня силового гидроцилиндра 4 изменится направление движения распределительных золотников 2 и последние будут двигаться к нейтральному положению. Величина хода поршня силового гидроцилиндра 4 определится отношением сигнала управления к крутизне датчиков обратной связи 5. Прекращение движения поршня силового гидроцилиндра 4 соответствует остановке распределительных золотников 2 в нейтрали.
Изменению направления движения распределительных золотников 2 и их остановке предшествует изменение знака перепада давлений в полостях 18 и 19 гидродвигателя 12. Вследствие этого уплотнительное кольцо 16 в канале 17 в разные фазы движения поршней 15 прижимается перепадом давлений то к одной, то к другой стенке канавки 17. Указанное явление "перекатывания" уплотнительного кольца 16 приводит к появлению автоколебаний поршня силового гидроцилиндра 4 до 0,5% от полного хода поршня как при работе привода от одного канала рулевой машины 1, так и при работе от любого числа каналов при отсутствии рассогласования между ними.
Из-за наличия разности диаметров штоков 20 и 21 в полостях 18 и 19 возникает перепад давлений, который воздействует на уплотнительное кольцо 16, расположенное в канавке 17, смещает его в направлении действия перепада давлений и плотно прижимает к стенке канавки 17. При движении поршня 15 вместе с распределительным золотником 2 на малых амплитудах, соответствующих малым входным сигналам, изменяется только градиент перепада давлений между управляющими полостями 18 и 19, а знак его остается постоянным независимо от каждого момента времени вышеописываемого переходного процесса. Изменение перепада давлений не сказывается на расположении уплотнительного кольца 16 в канавке 17 и оно остается постоянно прижатым к одной стороне канавки 17. Такое постоянство исключает "перекатывание" его и не приводит к появлению автоколебаний поршня силового гидроцилиндра 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СИЛОВОЙ ПРИВОД | 1981 |
|
SU1032691A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2262467C1 |
| РЕЗЕРВИРОВАННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1989 |
|
SU1601907A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ МНОГОКАНАЛЬНЫЙ РУЛЕВОЙ ПРИВОД | 2001 |
|
RU2211962C2 |
| МНОГОКАНАЛЬНАЯ РУЛЕВАЯ МАШИНА | 1976 |
|
SU1839995A1 |
| МНОГОКАНАЛЬНЫЙ РУЛЕВОЙ ПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1986 |
|
SU1839992A1 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ТРЕХПОЗИЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С РЕЗЕРВИРОВАННЫМ ЭЛЕКТРОУПРАВЛЕНИЕМ ПРИВОДА ПОВОРОТА КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДЕМПФЕРОМ | 2007 |
|
RU2342283C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2013 |
|
RU2513055C1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2002 |
|
RU2237826C2 |
| МНОГОКАНАЛЬНАЯ РУЛЕВАЯ МАШИНА ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1979 |
|
SU1839991A1 |
Изобретение относится к авиационной технике, в частности к электрогидравлическим силовым приводам, предназначенным для электродистанционных систем управления рулевыми поверхностями летательных аппаратов. Целью изобретения является улучшение динамических характеристик в области малых входных сигналов управления, снижение веса и уменьшение габаритов. Электрогидравлический силовой привод содержит 4-х канальную рулевую машину 1 с жестким соединением выходных звеньев каналов, распределительные золотники 2, датчики обратной связи 3, двухкамерный силовой гидроцилиндр 4 и датчик обратной связи 5. Гидродвигатель 12 каждого канала включает в себя поршень 15, имеющий уплотнительное резиновое кольцо 16, расположенное в канавке 17. При этом поршни 15 соседних каналов рулевой машины 1 соединены единым штоком 20 через разделительную герметизирующую втулку 22. При перемещении распределительных золотников 2 рабочая жидкость подается к полостям силового гидроцилиндра 4, величина хода поршня которого определяется отношением сигнала управления к крутизне датчиков обратной связи 5. Изменение перепада давлений не складывается на расположении уплотнительного кольца 16 в канавке 17 и оно остается постоянно прижатым к одной стороне канавки 17. 1 ил.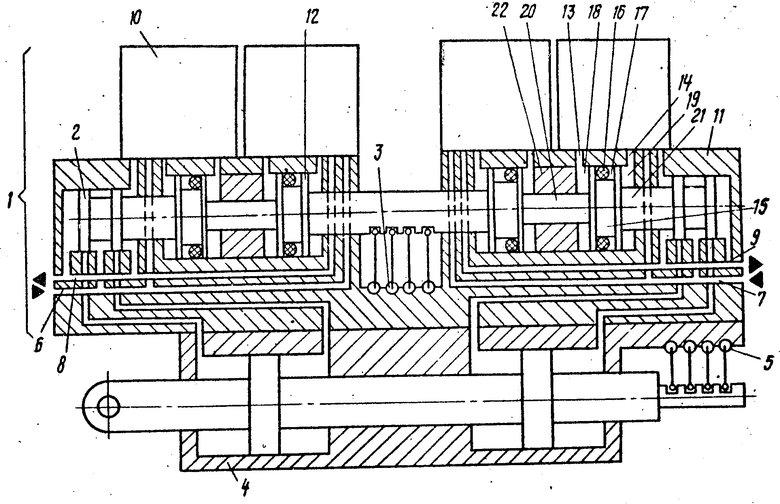
ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СИЛОВОЙ ПРИВОД, содержащий многоканальную управляющую рулевую машину с исполнительными поршнями, жестко закрепленными на общем выходном звене поступательного действия, связанном с соосно установленными распределительными устройствами, выходы которых гидравлически соединены с многокамерным силовым гидроцилиндром, отличающийся тем, что, с целью улучшения динамических характеристик в области малых входных сигналов управления, снижения веса и уменьшения габаритов, он снабжен штоком и герметизирующей разделительной втулкой, а управляющие полости исполнительного поршня каждого канала выполнены дифференциальными, причем соседние поршни рулевой машины соединены штоком через герметизирующую разделительную втулку.
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СИЛОВОЙ ПРИВОД | 1981 |
|
SU1032691A1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
