ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение.
Настоящее изобретение относится к роботу-уборщику и, более конкретно, к приводному устройству, предназначенному для робота-уборщика, имеющего узел привода, способный обеспечить преодоление порогов или препятствий.
2. Уровень техники
В большинстве случаев робот-уборщик выполняет работы по чистке автономно, без команд пользователя. Такой робот-уборщик, главным образом, используют в помещении, так что имеется множество случаев, когда ему приходится сталкиваться с препятствиями, такими как пороги, ковер или т.п. Для этих случаев предусмотрено демпфирующее устройство, предназначенное для обеспечения постоянного контакта приводных колес с полом и для уменьшения ударной нагрузки, передаваемой основному корпусу робота-уборщика.
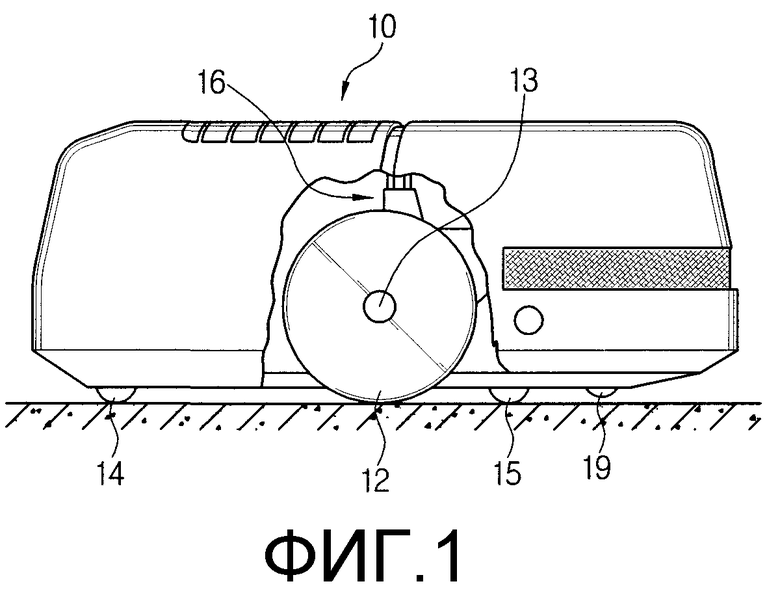
Фиг.1-3 представляют собой изображения, предназначенные для иллюстрации приводного устройства для робота-уборщика, раскрытого в документе РСТ WO 02/067744, в котором предусмотрено демпфирующее устройство.
Как показано на фиг.1-3, робот-уборщик заключен в круглый корпус 10 с обеспечением герметичности. Контейнер (непоказанный) для фильтра смонтирован внутри корпуса 10 и предназначен для приема собранной грязи, такой как пыль и т.п. Кроме того, два приводных колеса 12 установлены диаметрально противоположно друг другу внутри робота-уборщика. Каждое приводное колесо 12 смонтировано с возможностью вращения на валу 13 приводного колеса, и впереди, и сзади каждого приводного колеса смонтированы два опорных элемента, а именно задние ролики 14 и передние ролики 15. Задние ролики 14 находятся в контакте с полом, способствуют работе робота-уборщика и установлены с каждой стороны от центральной оси, направленной в направлении движения робота-уборщика. Кроме того, передние ролики 15 смонтированы спереди от вала 13 приводного колеса. Опорные части, снабженные передними и задними роликами 14 и 15, образуют зазор между полом и нижней поверхностью робота-уборщика, так что предотвращается непосредственный контакт нижней поверхности робота-уборщика с полом.
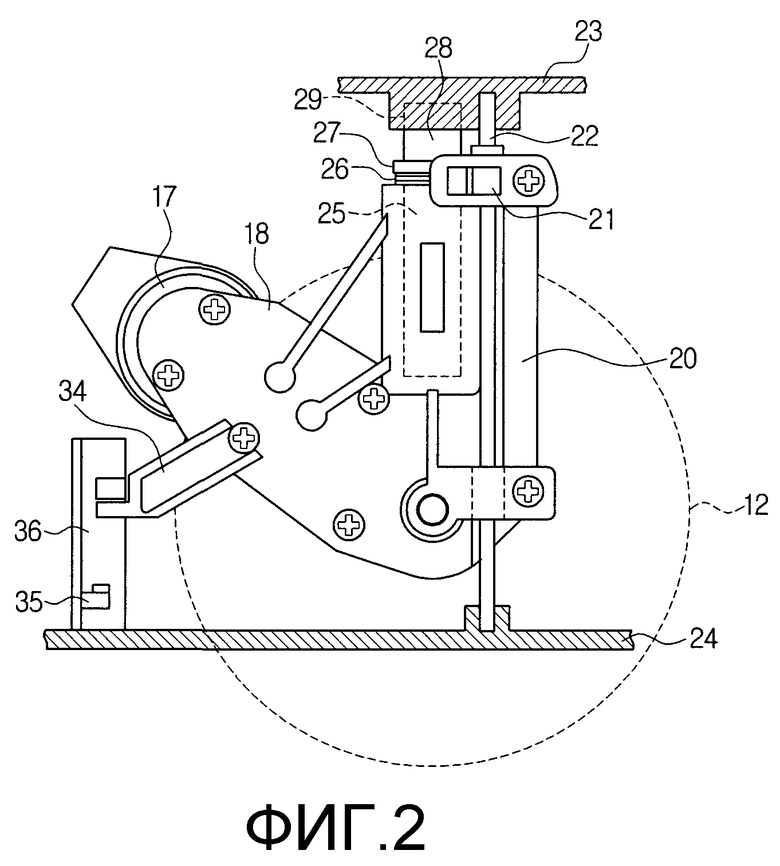
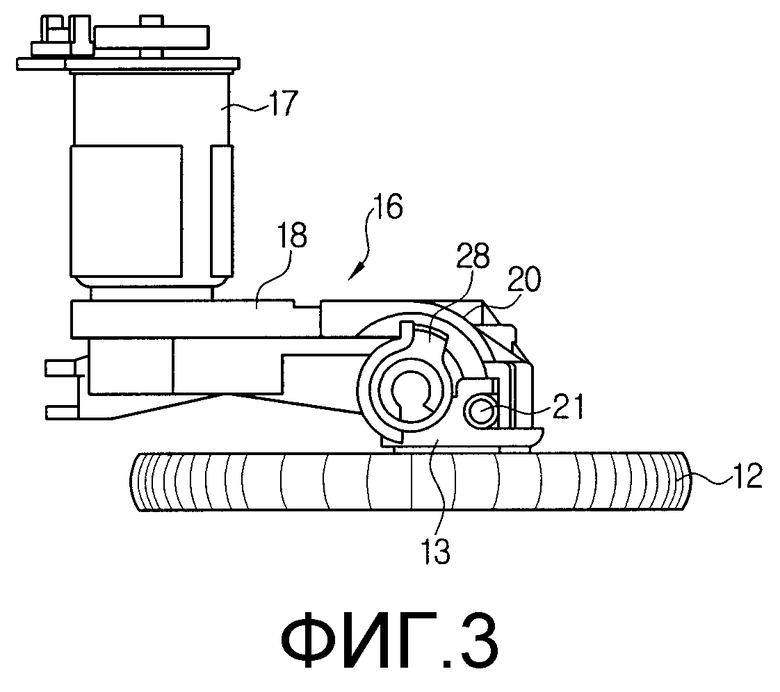
Два приводных колеса 12 изготовлены из материалов, имеющих высокий коэффициент трения, и, как показано на фиг.2 и 3, прикреплены к опорному элементу 16 для приводных колес. Опорный элемент 16 для приводных колес соединен с электродвигателем 17 и с трансмиссией 18.
Опорный элемент 16 для приводных колес редуцирует вертикальные перемещения корпуса 10, в котором направленный вверх элемент 20 соединен со скользящим подшипником 21 с помощью винтов в целях создания опоры для колес 12 в вертикальном направлении, и скользящий подшипник 21 может совершать возвратно-поступательное движение в направлениях вверх и вниз с помощью подвижной направляющей 22.
Скользящий подшипник 21 и подвижная направляющая 22 расположены между частями 23 и 24 верхней и нижней стенки, и стопор 25 ограничивает смещение скользящего подшипника 21 и подвижной направляющей 22, при этом верхний конец 28 стопора, соединенный с цилиндрической винтовой пружиной 26 и кольцом 27, расположен в гнезде 29, выполненном в части 23 верхней стенки, так что стопор 28 может играть роль демпфера.
Между тем трансмиссия 18 выполнена с удлинителем 34 и соединена с возможностью скольжения с кронштейном 36, на котором смонтированы два микропереключателя 35, соединенные с частью 24 нижней стенки. Микропереключатели 35 приводятся в действие, когда колеса 12 оказываются расположенными на некотором расстоянии от пола из-за формы пола или препятствий, при этом определенному управляющему устройству передается информация о том, находятся ли колеса 12 в контакте с полом.
Однако, как показано на фиг.1-3, опорный элемент 16 для приводных колес, предусмотренный для приводных колес 12, обеспечивает возможность только небольшой длины перемещения подъема и опускания, когда робот-уборщик сталкивается с препятствиями или порогами. Соответственно, когда одно приводное колесо 12 катится через отверстие на полу или по наклонному месту, другое приводное колесо 12 будет подниматься над полом, а не будет находиться в контакте с полом. Следовательно, когда одно приводное колесо будет поднято и будет вращаться в воздухе, робот-уборщик не сможет возвратиться в свое нормальное положение "самостоятельно", без помощи пользователей.
Кроме того, обычный робот-уборщик имеет недостаток, связанный с тем, что, поскольку мощность электродвигателя 17 передается через систему зубчатых передач, то есть трансмиссию 18, могут возникать шум из-за работы зубчатых передач и потери мощности, и конструкция становится сложной, возможно с плохой собираемостью, что приводит к увеличению производственной себестоимости, поскольку дополнительно требуются стеновые элементы, служащие опорой трансмиссии 18.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Настоящее изобретение было создано для решения данной проблемы, так что в основу настоящего изобретения положена задача разработать приводное устройство для робота- уборщика, имеющего усовершенствованную конструкцию, которая позволяет приводным колесам постоянно находиться в контакте с полом.
Другая задача, решаемая настоящим изобретением, заключается в разработке приводного устройства для робота-уборщика, имеющего упрощенный узел механического привода для приводного двигателя и приводных колес, с улучшенной собираемостью и уменьшенной производственной себестоимостью.
Для решения вышеуказанных задач и/или достижения отличительных признаков настоящего изобретения приводное устройство для робота-уборщика включает в себя основной корпус робота-уборщика, приводные двигатели, установленные в основном корпусе робота-уборщика и предназначенные для передачи мощности на приводные колеса, кожухи приводных двигателей, шарнирно соединенные с основным корпусом робота-уборщика и предназначенные для размещения приводных двигателей в них, и поджимающие элементы, вставленные между основным корпусом робота-уборщика и кожухами приводных двигателей и предназначенные для поджима кожухов приводных двигателей.
В соответствии с предпочтительным вариантом осуществления настоящего изобретения основной корпус робота-уборщика включает в себя нижний корпусной элемент, образующий нижнюю часть робота-уборщика, и поддерживающие кронштейны, соединенные с нижним корпусным элементом и предназначенные для обеспечения опоры для кожухов приводных двигателей с возможностью поворота указанных кожухов относительно них.
В данном случае поддерживающие кронштейны предпочтительно содержат опорные элементы для шарниров, образованные в месте, соответствующем шарнирным элементам кожухов приводных двигателей, и предназначены для поджима шарнирных элементов в направлении нижней части.
Кроме того, приводные двигатели могут быть соединены с приводными колесами, обеспечивающими перемещение основного корпуса робота-уборщика, и в этом случае приводные колеса могут иметь наружные периферийные поверхности, выполненные пилообразными.
Кроме того, каждый из кожухов приводных двигателей может быть образован из верхнего кожуха и нижнего кожуха, и предпочтительно каждый из верхнего и нижнего кожухов имеет шарнир, предназначенный для обеспечения возможности поворота кожуха, выступающий в вертикальном направлении по отношению к приводным колесам и параллельный нижней части.
Кроме того, шарниры, предназначенные для обеспечения возможности поворота, могут представлять собой цилиндрические выступы, которые образуются, когда полукруглые выступы, образованные на верхнем и нижнем кожухах, будут соединены друг с другом.
Кроме того, предпочтительно поджимающие элементы могут представлять собой цилиндрические винтовые пружины, и предпочтительно одни концы цилиндрических винтовых пружин прикреплены к первым гнездообразным частям, образованным на нижних сторонах поддерживающих кронштейнов, и другие их концы размещены во вторых гнездообразных частях, образованных на наружных периферийных поверхностях кожухов приводных двигателей.
В данном случае предпочтительно, если каждая из первых гнездообразных частей будет иметь направляющую канавку, которая выполнена с цилиндрической формой, при этом имеется некоторое пространство, образованное в указанной канавке, и которая предназначена для предотвращения освобождения цилиндрической винтовой пружины; и соединительный выступ, выступающий на центральной части направляющей канавки и имеющий наружную периферийную поверхность с размером, соответствующим внутренней периферийной поверхности цилиндрической винтовой пружины.
Кроме того, каждая из вторых гнездообразных частей выполнена с формой полого цилиндра и имеет опорную канавку, имеющую внутреннюю периферийную поверхность с размером, соответствующим наружной периферийной поверхности цилиндрической винтовой пружины.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение будет описано подробно со ссылкой на нижеуказанные чертежи, на которых аналогичные ссылочные номера относятся к аналогичным элементам и на которых:
фиг.1 представляет собой выполненное с частичным вырывом изображение обычного робота-уборщика;
фиг.2 представляет собой вид сбоку вала приводного колеса по фиг.1;
фиг.3 представляет собой вид сверху конструкции по фиг.2;
фиг.4 представляет собой перспективное изображение приводного устройства для робота-уборщика в соответствии с вариантом осуществления настоящего изобретения;
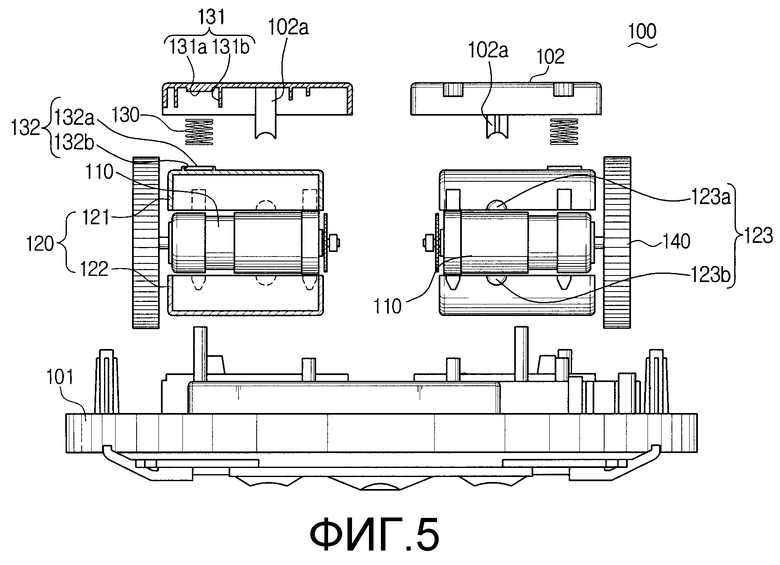
фиг.5 представляет собой выполненный с пространственным разделением элементов вид сверху приводного устройства для робота-уборщика в соответствии с вариантом осуществления настоящего изобретения;
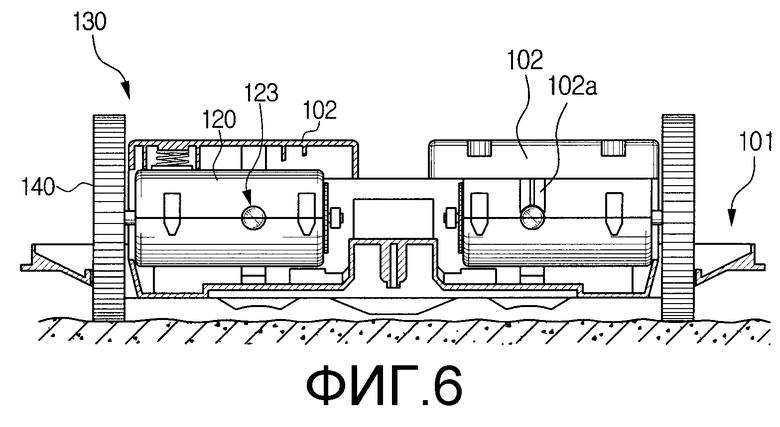
фиг.6 представляет собой вид спереди приводного устройства робота-уборщика, работающего на ровном полу, в соответствии с вариантом осуществления настоящего изобретения;
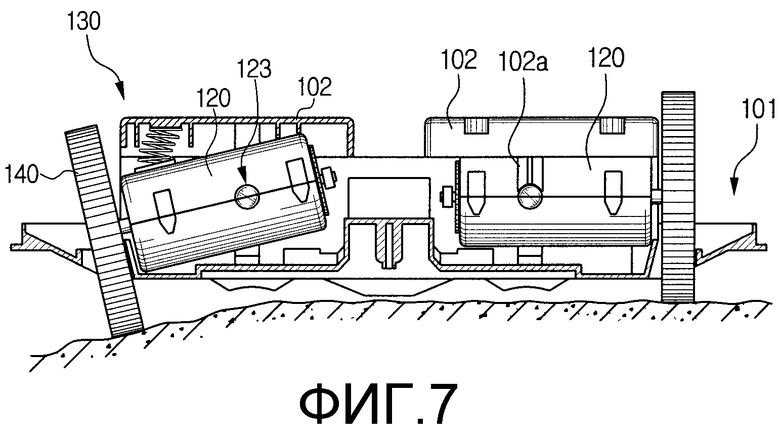
фиг.7 представляет собой вид спереди приводного устройства робота-уборщика, работающего на неровном полу, в соответствии с вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
Далее предпочтительный вариант осуществления настоящего изобретения будет описан со ссылкой на сопровождающие чертежи.
Как показано на фиг.4 и 5, приводное устройство для робота-уборщика согласно настоящему изобретению имеет основной корпус 100 робота-уборщика, приводные двигатели 110, смонтированные в основном корпусе 100 робота-уборщика и предназначенные для приведения робота-уборщика в действие, кожухи 120 приводных двигателей, шарнирно соединенные с основным корпусом 100 робота-уборщика и предназначенные для размещения в них приводных двигателей 110, поджимающие элементы 130, предназначенные для поджима верхних сторон кожухов 120 приводных двигателей и обеспечения опоры для шарнирно присоединенных приводных двигателей 110, и приводные колеса 140.
Основной корпус 100 робота-уборщика имеет нижний корпусной элемент 101, образующий нижнюю часть робота-уборщика, и поддерживающие кронштейны 102, соединенные с нижним корпусным элементом 101 и обеспечивающие опору для кожухов 120 приводных двигателей с возможностью поворота указанных кожухов относительно них. На верхней стороне нижнего корпусного элемента 101 установлены кожухи 120 приводных двигателей, в которых установлены приводные двигатели 110, и смонтированы пылесборник и управляющее устройство, которые не показаны.
Поддерживающие кронштейны 102 создают опору для кожухов 120 приводных двигателей, установленных на нижнем корпусном элементе 101, с возможностью поворота указанных кожухов относительно данных кронштейнов. Поддерживающие кронштейны 102 выполнены с опорными элементами 102а для шарниров. Опорные элементы 102а для шарниров образованы в местах, соответствующих шарнирам 123, предназначенным для обеспечения возможности поворота и выступающим на кожухах 120 приводных двигателей, и создают опору для шарниров 123, предназначенных для обеспечения возможности поворота, с возможностью поворота указанных шарниров относительно них. Опорные элементы 102а для шарниров далее будут подробно описаны вместе с кожухами 120 приводных двигателей.
Приводные двигатели 110 обеспечивают мощность, необходимую для перемещения робота-уборщика. В центрах приводных двигателей 110 установлены приводные валы 111, служащие для передачи мощности. Приводные двигатели 110 обеспечивают передачу мощности с помощью приводных валов 111, соединенных непосредственно с приводными колесами 140, а не путем использования дополнительного устройства для передачи мощности, такого как трансмиссия. То есть, поскольку мощность приводных двигателей 110 передается непосредственно на приводные колеса 140, может быть создан робот-уборщик, имеющий меньшие потери мощности и меньшее по размеру, в котором приводное устройство занимает меньший объем.
Между тем приводные двигатели 110 выполнены с соединительными элементами 112, предназначенными для соединения приводных валов 111 и приводных колес 140. Приводные валы 111 соединены с центрами соединительных элементов 112 и выполнены в форме цилиндра, имеющего определенную толщину. Две фиксирующие канавки 113 образованы напротив друг друга на окружной периферии каждого из соединительных элементов 112, и в фиксирующие канавки 113 входят фиксирующие выступы 142а, выступающие в местах, соответствующих внутренним колесам 142, так что приводные двигатели 110 и приводные колеса 140 могут вращаться совместно без проскальзывания, возникающего между ними. Хотя это и не показано, необязательно должны быть предусмотрены две фиксирующие канавки 113, но фиксирующие канавки 113 могут быть выполнены в виде множестве фиксирующих канавок 113, которые расположены напротив друг друга. Приводные колеса 140 описаны ниже.
Каждый из кожухов 120 приводных двигателей образован с верхним кожухом 121 и нижним кожухом 122. Каждый из верхнего и нижнего кожухов 121 и 122 имеет один шарнир 123, предназначенный для обеспечения возможности поворота, выступающий в вертикальном направлении по отношению к приводным валам 111 приводных колес 140 и расположенный параллельно нижней части. Шарниры 123, предназначенные для обеспечения возможности поворота, выполнены в виде цилиндрического выступа, для формирования которого полукруглые выступы 123а и 123b, образованные в местах, соответствующих соединительным концевым частям верхнего и нижнего кожухов 121 и 122, соединяют друг с другом. Шарниры 123, предназначенные для обеспечения возможности поворота и образованные в виде цилиндрических выступов, предпочтительно выступают один за другим вперед и назад от кожухов 120 приводных двигателей, как показано на фиг.4 и 5.
Опорные элементы 102а для шарниров служат опорой верхним частям шарниров 123, предназначенным для обеспечения возможности поворота. Концевые участки опорных элементов 102а для шарниров имеют внутренние периферийные поверхности и выполнены так, чтобы соответствовать шарнирам 123, предназначенным для обеспечения возможности поворота, в результате чего они будут охватывать наружные периферийные поверхности шарниров 123, предназначенных для обеспечения возможности поворота. Предпочтительно, чтобы опорные элементы 102а для шарниров имели полукруглые контактные концевые участки, соответствующие наружным периферийным поверхностям шарниров 123, предназначенных для обеспечения возможности поворота. При наличии опорных элементов 102а для шарниров, выполненных, как описано выше, обеспечивается такая опора для шарниров 123, предназначенных для обеспечения возможности поворота, при которой кожухи 120 приводных двигателей могут поворачиваться относительно шарниров 123, предназначенных для обеспечения возможности поворота.
Поджимающие элементы 130 предпочтительно образованы с цилиндрическими винтовыми пружинами, вставленными между нижним корпусным элементом 101 и поддерживающими кронштейнами 120. Одни концы цилиндрических винтовых пружин прикреплены к первым гнездообразным частям 131, образованным на нижних сторонах поддерживающих кронштейнов 102, и другие их концы размещены во вторых гнездообразных частях 132, образованных в местах, противоположных первым гнездообразным частям 131, на наружных периферийных поверхностях кожухов 120 приводных двигателей.
Первые гнездообразные части 131 выполнены в форме полого цилиндра, и каждая из них имеет соединительный выступ 131a, присоединенный к внутренней периферийной поверхности одной цилиндрической винтовой пружины, и направляющую канавку 131b, предотвращающую освобождение цилиндрической винтовой пружины. В этом случае соединительный выступ 131а выступает центрально относительно направляющей канавки 131b.
Вторые гнездообразные части 132 выполнены в цилиндрической форме, при этом в них образуется некоторое пространство. В этом случае нижние поверхности 132а вторых гнездообразных частей 132 выполнены так, чтобы они соответствовали наружным периферийным поверхностям цилиндрических винтовых пружин, и опорные канавки 132b вторых гнездообразных частей 132 выполнены так, что они имеют стенки, выступающие на определенную высоту относительно нижних поверхностей 132а.
Соответственно, цилиндрические винтовые пружины будут вставлены между первыми и вторыми гнездообразными частями 131 и 132, при этом направляющие канавки 131b предотвращают освобождение цилиндрических винтовых пружин, и цилиндрические винтовые пружины поджимают кожухи 120 приводных двигателей в направлении нижних поверхностей.
Приводные колеса 140 соединены непосредственно с приводными двигателями 110. Как было упомянуто выше, приводные двигатели 110 имеют приводные валы 111, соединенные непосредственно с приводными колесами 140 без трансмиссии, в которой используется дополнительная система зубчатых передач. Каждое из приводных колес 140 имеет наружное колесо 141, находящееся в непосредственном контакте с полом, и внутреннее колесо 142, соединенное с одним приводным двигателем 110. Наружное колесо 141 предпочтительно выполнено из материала, имеющего высокий коэффициент трения, и имеет наружную окружную периферийную поверхность, выпукло-вогнутую, с пилообразной формой. Благодаря материалу и форме такого наружного колеса 141 контактное давление на пол приводных колес 140, находящихся в контакте с полом, может быть увеличено. Соответственно, увеличение контактного давления приводных колес 140 на пол предотвращает холостые вращения или проскальзывание приводных колес 140.
Между тем внутреннее и наружное колеса 141 и 142 могут быть образованы в виде одного тела или выполнены в виде отдельных элементов, при этом в последнем случае наружное колесо 141 должно быть насажено на наружную окружную периферийную поверхность внутреннего колеса 141.
Например, наружное приводное колесо 141 из резины или полимерного материала, имеющего высокий коэффициент трения, может быть надето на наружную окружную периферийную поверхность круглого внутреннего колеса 142.
Далее функционирование приводного устройства для робота-уборщика согласно настоящему изобретению будет описано со ссылкой на сопровождающие чертежи.
Фиг.6 и 7 представляют собой изображения, функционирования приводного устройства для робота-уборщика согласно варианту осуществления настоящего изобретения.
Фиг.6 представляет собой вид спереди, с частичным вырывом робота-уборщика, имеющего приводное устройство, работающее на ровном полу, в соответствии с вариантом осуществления настоящего изобретения.
Как показано на фиг.6 и 7, в случае ровного пола все приводные колеса 140, смонтированные на обеих сторонах основного корпуса 100 робота-уборщика, входят в контакт с полом. То есть поджимающие элементы 130 обеспечивают приложение момента силы для поворота кожухов 120 приводных двигателей относительно шарниров 123, предназначенных для обеспечения возможности поворота. Тем не менее, момент силы имеет величину, меньшую по сравнению с величиной усилия сопротивления, действующего в вертикальном направлении и обусловленного силой тяжести, действующей на приводные колеса 140, то есть силой, обусловленной весом самого робота-уборщика, так что кожухи 120 приводных двигателей не поворачиваются, а располагаются параллельно полу.
Однако, как показано на фиг.7, когда приводные колеса на одной стороне поднимаются над полом из-за наличия изогнутых участков пола или препятствий, поднятые приводные колеса 140 имеют только момент силы, приложенный со стороны поджимающих элементов 130. Соответственно, кожухи 120 приводных двигателей, в которых размещены приводные двигатели 110, поворачиваются относительно шарниров 123, предназначенных для обеспечения возможности поворота, до тех пор, пока приводные колеса 140 не войдут в контакт с полом.
Соответственно, даже несмотря на то, что основной корпус робота-уборщика будет поднят над полом из-за наличия изогнутых участков пола или препятствий, приводные колеса 140 постоянно входят в контакт с полом, и предотвращается их холостое вращение (или обороты), в результате чего обеспечивается возможность устойчивой работы робота-уборщика.
Как было указано выше, в приводном устройстве для робота-уборщика согласно настоящему изобретению кожухи приводных двигателей установлены с возможностью поворота относительно центра шарниров, предназначенных для обеспечения возможности поворота, так что приводные колеса постоянно входят в контакт с полом, что предотвращает подъем приводных колес над полом и выполнение холостых оборотов из-за наличия изогнутых участков пола или препятствий.
Кроме того, поскольку в приводном устройстве для робота-уборщика согласно настоящему изобретению приводные двигатели и приводные колеса соединены друг с другом напрямую, не требуется никакого дополнительного узла для передачи мощности, результатом чего является уменьшенное количество деталей, улучшенная собираемость и сниженная производственная себестоимость, что тем самым повышает конкурентоспособность изделий.
Несмотря на то, что изобретение было показано и описано со ссылкой на определенный предпочтительный вариант его осуществления, специалистам в данной области техники следует понимать, что могут быть выполнены различные изменения формы и деталей устройства по изобретению, не отходя от идеи и объема защиты изобретения, определенных в приложенной формуле изобретения.
Приводное устройство может быть использовано в роботе-уборщике, имеющем узел привода, способном преодолевать пороги и препятствия при постоянном контакте приводных колес с полом, и позволяет упростить узел механического привода при улучшенной собираемости загрязнений и сниженной производственной себестоимости. Устройство содержит основной корпус робота-уборщика, приводные двигатели, установленные в основном корпусе робота-уборщика для передачи мощности на приводные колеса, кожухи приводных двигателей, шарнирно соединенные с основным корпусом робота-уборщика и предназначенные для размещения приводных двигателей в них. Каждый из кожухов приводных двигателей содержит верхний кожух и нижний кожух. Между основным корпусом робота-уборщика и кожухами приводных двигателей вставлены поджимающие элементы, предназначенные для поджима кожухов приводных двигателей. Для обеспечения возможности поворота кожуха предусмотрен шарнир, выступающий от верхнего и нижнего кожухов соответственно в вертикальном направлении по отношению к приводным колесам и параллельный нижней части. Основной корпус робота-уборщика содержит нижний корпусной элемент, образующий нижнюю часть робота-уборщика, и поддерживающие кронштейны, соединенные с нижним корпусным элементом и предназначенные для обеспечения опоры для кожухов приводных двигателей с возможностью поворота указанных кожухов относительно них. 9 з.п. ф-лы, 7 ил.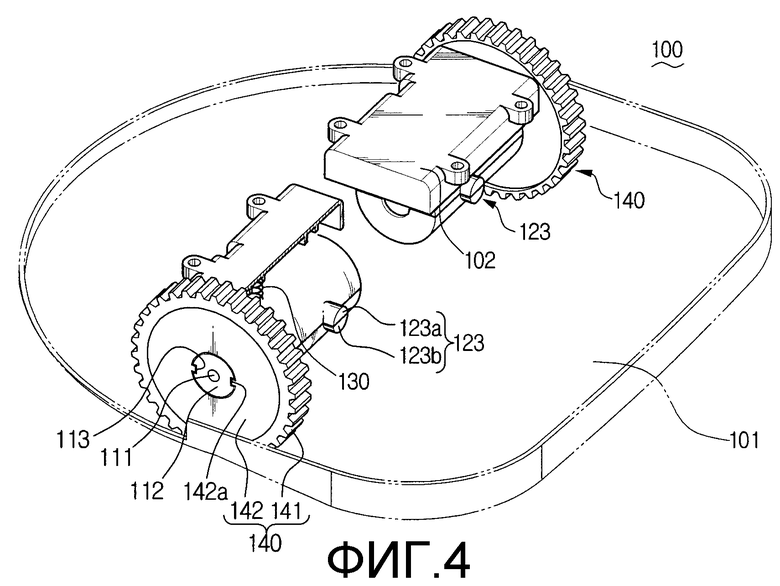
| US 6481515 B1, 19.11.2002 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| DE 10055751 A1, 23.05.2002 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ПЫЛЕСОС С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 1997 |
|
RU2127997C1 |

