ССЫЛКА НА СВЯЗАННЫЕ ЗАЯВКИ
В настоящей заявке используются материалы корейской заявки №2004-86109, поданной 27 октября 2004 года в Корейское бюро по защите интеллектуальной собственности, и содержание этой заявки включено в настоящее описания путем ссылки.
УРОВЕНЬ ТЕХНИКИ
Область техники
Настоящее изобретение относится к автоматической системе уборки и к способу возврата робота-уборщика к внешнему зарядному устройству. Более конкретно, настоящее изобретение относится к автоматической системе уборки, содержащей робота-уборщика, имеющего аккумуляторную батарею, и внешнее зарядное устройство для ее подзарядки, и к способу возврата робота-уборщика к внешнему зарядному устройству.
Описание известных технических решений
Обычно робот-уборщик автоматически перемещается по некоторой области в заданной зоне с целью очистки пола или поверхности путем всасывания пыли и грязи без участия пользователя. Робот-уборщик измеряет расстояние от себя до препятствий, например мебели, офисного оборудования и стен в области уборки, и объезжает их, не сталкиваясь с препятствиями, за счет использования информации об измеренном расстоянии и таким образом выполняет работу по уборке согласно инструкциям.
Робот-уборщик содержит батарею, предназначенную для снабжения его электроэнергией для работы. Чтобы разряженную батарею можно было использовать повторно, обычно применяют аккумуляторные батареи. Поэтому робот-уборщик нуждается во внешнем зарядном устройстве для подзарядки батареи. Автоматическая система уборки содержит как робота-уборщика, так и внешнее зарядное устройство.
Для автоматического возврата робота-уборщика к внешнему зарядному устройству робот-уборщик должен правильно определить местонахождение внешнего зарядного устройства.
Среди различных способов определения роботом-уборщиком местонахождения внешнего зарядного устройства и соединения с внешним зарядным устройством один из способов заключается в следующем. Внешнее зарядное устройство имеет зарядные клеммы для соединения с роботом-уборщиком и снабжено меткой зарядного устройства, в то время как робот-уборщик содержит датчик для обнаружения метки. Обычно для обнаружения метки зарядного устройства используется оптический датчик отраженного сигнала. Оптический датчик отраженного сигнала имеет светоизлучающую часть и светоприемную часть для приема света, отраженного от метки зарядного устройства. Когда робот-уборщик собирается возвратиться к внешнему зарядному устройству после окончания уборки или при разряде батареи, светоизлучающая часть, имеющаяся в роботе-уборщике, испускает свет, а светоприемная часть отражательного оптического датчика принимает свет, отраженный от метки зарядного устройства, которая установлена на внешнем зарядном устройстве. В результате робот-уборщик определяет местонахождение внешнего зарядного устройства и возвращается к нему.
Однако оптический датчик отраженного сигнала, используемый в автоматической системе уборки с внешним зарядным устройством, является дорогим. Кроме того, роботу-уборщику требуется много времени, чтобы возвратиться к внешнему зарядному устройству из-за небольшого расстояния, на котором оптический датчик способен воспринимать сигнал.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение призвано решить по меньшей мере вышеупомянутые проблемы и/или устранить вышеописанные недостатки и обеспечить получение по меньшей мере преимуществ, описанных ниже. Соответственно, целью настоящего изобретения является создание автоматической системы уборки, обладающей преимуществом в отношении стоимости изготовления и способности датчика измерять расстояние до препятствий, и создание способа возврата робота-уборщика к внешнему зарядному устройству.
Для достижения вышеописанных целей настоящего изобретения предлагается автоматическая система уборки, включающая внешнее зарядное устройство, содержащее зарядную опору с зарядными клеммами и множество передающих частей, предназначенных для посылки сигналов с различными кодами и мощностями; причем робот-уборщик содержит аккумуляторную батарею, соединительные клеммы для соединения с зарядными клеммами для подачи электроэнергии в аккумуляторную батарею, приемную часть для приема сигналов от множества передающих частей и управляющую часть для управления перемещением робота-уборщика с использованием сигналов, принятых приемной частью, так чтобы соединительные клеммы оказались соединены с зарядными клеммами.
Дальнодействующие передатчики расположены на противоположных краях зарядной опоры, а близкодействующий передатчик расположен между дальнодействующими передатчиками.
Дальнодействующие передатчики и близкодействующий передатчик расположены по существу на одной линии.
Каждый из дальнодействующих передатчиков и близкодействующий передатчик передает сигналы в различных угловых диапазонах и в различных направлениях, и угловой диапазон передачи короткодействующего передатчика являются более узким, чем дальнодействующего передатчика.
Кроме того, передающая часть содержит стыковочный индукционный передатчик, расположенный в определенном месте зарядной опоры и способный генерировать сигналы с другими кодами, меньшей мощностью и в более узком угловом диапазоне по сравнению с сигналами близкодействующего передатчика.
Стыковочная индукционная передающая часть расположена выше или ниже близкодействующего передатчика на определенном расстоянии.
Множество передающих частей могут включать инфракрасный излучающий элемент.
Другая цель изобретения заключается в создании способа возврата робота-уборщика к внешнему зарядному устройству, так чтобы соединительные клеммы робота-уборщика оказались соединены с зарядными клеммами зарядной опоры, причем этот способ включает следующие этапы: а) прием сигнала запроса на подзарядку, когда робот-уборщик перемещается и осуществляет уборку определенной области согласно инструкциям пользователя; б) после приема инфракрасных сигналов с различными кодами и мощностями, анализ этих различных кодов, входящих в инфракрасные сигналы, и управление роботом-уборщиком с целью его приближения к зарядной опоре; и в) соединение соединительных клемм робота-уборщика с зарядными клеммами зарядной опоры.
Этап (б) включает: г) прием роботом-уборщиком инфракрасных сигналов и перемещение его прямо по направлению к передней стороне зарядной опоры; д) если инфракрасные сигналы не получены в процессе перемещения прямо, то поворот робота-уборщика налево или направо приблизительно на 90° и перемещение его прямо до тех пор, пока не будут приняты инфракрасные сигналы; е) после приема инфракрасных сигналов поворот робота-уборщика приблизительно на 90° для того, чтобы направить его на переднюю сторону зарядной опоры, и перемещение его вперед; и ж) после приема инфракрасных сигналов, содержащих другой код по сравнению с предыдущим принятым инфракрасным сигналом, приближение робота-уборщика к зарядной опоре под углом.
На этапе (в) при приеме инфракрасных сигналов, имеющих еще один другой код по сравнению с предыдущим другим кодом в процессе перемещения под углом, робот-уборщик перемещается прямо по направлению к передней стороне зарядной опоры, так чтобы соединительные клеммы робота-уборщика соединились с зарядными клеммами зарядной опоры.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеуказанные цели и другие особенности изобретения станут понятнее из последующего подробного описания вариантов его выполнения со ссылками на сопровождающие чертежи, где
на фиг.1 схематично показан вид в перспективе автоматической системы уборки согласно одному из вариантов выполнения настоящего изобретения;
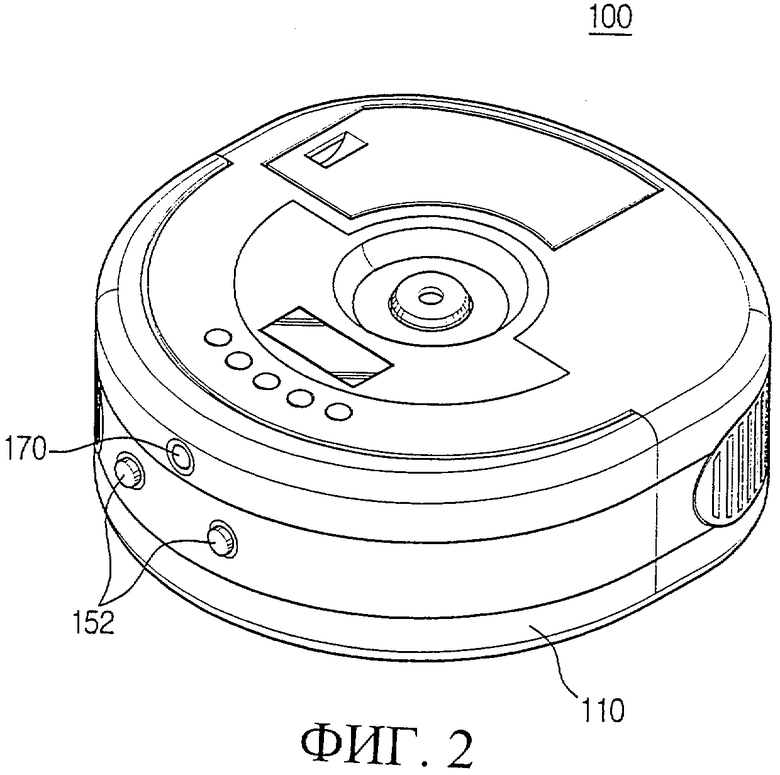
на фиг.2 схематично показан вид в перспективе робота-уборщика, изображенного на фиг.1;
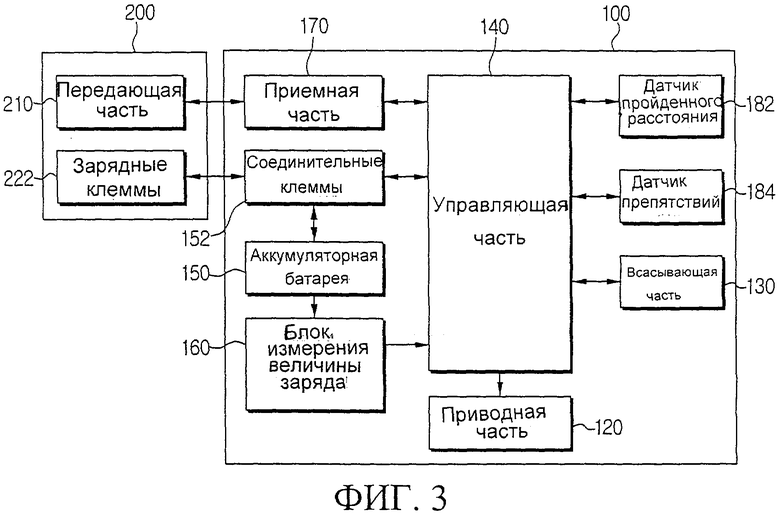
на фиг.3 показана блок-схема автоматической системы уборки, изображенной на фиг.1;
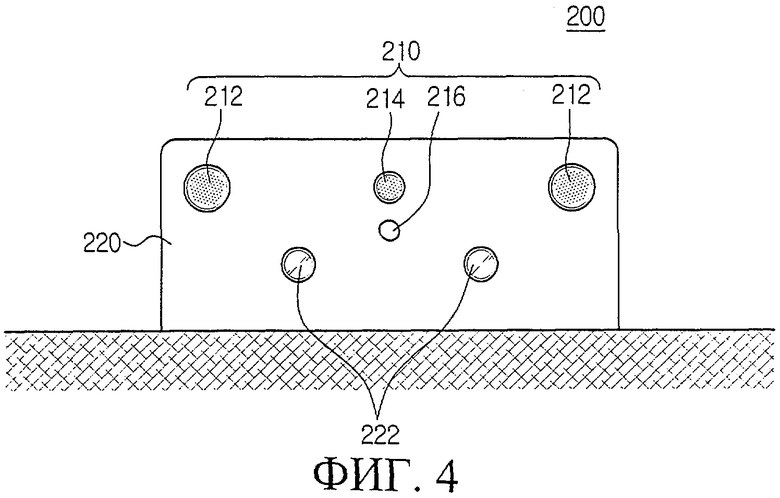
на фиг.4 показан вид спереди внешнего зарядного устройства, изображенного на фиг.1;
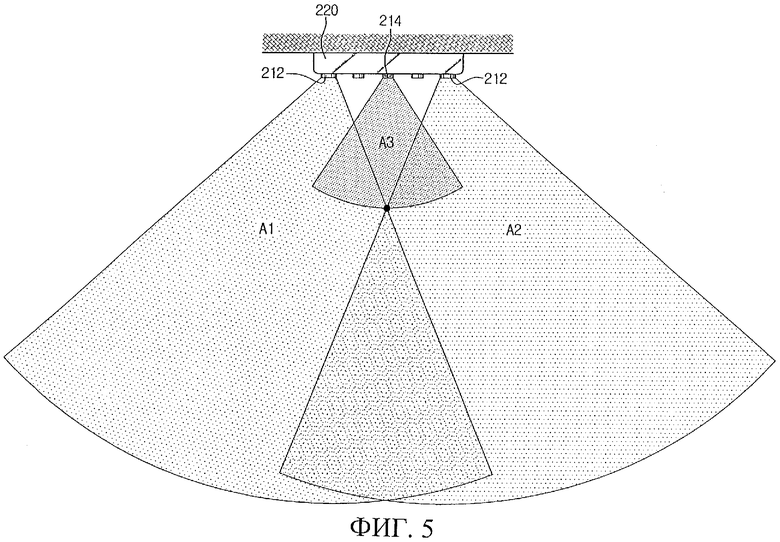
на фиг.5 и 6 показаны зоны передачи сигналов множества передатчиков, показанных на фиг.4;
на фиг.7 и 8 иллюстрируется операция по возврату робота-уборщика к внешнему зарядному устройству; и
на фиг.9 показана последовательность операций для возврата робота-уборщика к внешнему зарядному устройству согласно одному из вариантов выполнения настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
Ниже один из вариантов выполнения настоящего изобретения будет описан подробно со ссылками на сопровождающие чертежи.
В последующем описании одинаковые элементы на разных чертежах обозначены одинаковыми позициями. Объекты, конкретизированные в настоящем описании, например детализированная конструкция и элементы, даны только для лучшего понимания настоящего изобретения. Таким образом, понятно, что настоящее изобретение может быть осуществлено без этих конкретных объектов. Кроме того, известные функции или конструкции не описаны подробно, поскольку это загромоздило бы изложение изобретения ненужными подробностями.
На фиг.1-4 показана автоматическая система уборки, включающая робота-уборщика 100 и внешнее зарядное устройство 200.
Робот-уборщик 100 содержит корпус 110 уборщика, всасывающую часть 130, приводную часть 120, датчик 184 обнаружения препятствий, датчик 182 пройденного расстояния, соединительные клеммы 152, аккумуляторную батарею 150, приемную часть 170 и управляющую часть 140.
Всасывающая часть 130 установлена на корпусе 110 уборщика и предназначена для втягивания насыщенного пылью воздуха с очищаемой поверхности. Всасывающая часть 130 может иметь разную конструкцию. Например, всасывающая часть 130 может включать всасывающий двигатель (не показан) и пылесборную камеру, предназначенную для сбора пыли, втянутой всасывающим двигателем через всасывающее отверстие или всасывающую трубу, обращенную к очищаемой поверхности.
Приводная часть 120 включает колеса (не показаны), установленные на противоположных сторонах корпуса 110 уборщика, и приводные двигатели, предназначенные для вращения соответствующих колес. Приводная часть 120 вращает приводные двигатели по часовой стрелке или против часовой стрелки согласно управляющему сигналу, поступающему из управляющей части 140. Направление движения задается путем изменения скорости вращения (числа оборотов в минуту) соответствующих приводных двигателей.
Датчик 184 обнаружения препятствий обнаруживает препятствия или стены впереди или в направлении движения и измеряет расстояние до этих препятствий или стен. В качестве датчика 184 обнаружения препятствий можно использовать инфракрасный датчик или ультразвуковой датчик.
Датчик 182 пройденного расстояния может включать датчик вращения, измеряющий скорость вращения колес. Например, в качестве датчика вращения может использоваться угловой кодер, измеряющий скорость вращения приводных двигателей.
В иллюстрируемом варианте выполнения настоящего изобретения пара соединительных клемм 152 установлена на передней стороне робота-уборщика на высоте, соответствующей высоте расположения зарядных клемм 222 внешнего зарядного устройства 200. Однако при использовании трехфазного источника переменного тока будут предусмотрены три соединительные клеммы 152 и три зарядные клеммы 222.
Аккумуляторная батарея 150 установлена в корпусе 110 уборщика и соединена с соединительными клеммами 152. Поэтому, когда соединительные клеммы 152 соединены с зарядными клеммами 222 внешнего зарядного устройства 200, аккумуляторная батарея 150 заряжается от сетевого источника переменного тока. Другими словами, когда робот-уборщик 100 соединен с внешним зарядным устройством 200, электроэнергия подается по силовому проводу 244 (фиг.1), соединенному с сетевым источником переменного тока, поступает на зарядные клеммы 222 внешнего зарядного устройства 200 и в аккумуляторную батарею 150 через соединительные клеммы 152 в корпусе 110 уборщика.
Блок 160 измерения величины заряда измеряет величину заряда аккумуляторной батареи 150 и, если измеренная величина заряда дошла до установленного нижнего предела, передает сигнал запроса подзарядки в управляющую часть 140.
Приемная часть 170 установлена на передней стороне корпуса 110 уборщика и предназначена для приема сигналов с различными кодами от передающей части 210 внешнего зарядного устройства 200, которая описана ниже.
Управляющая часть 140 управляет работой вышеописанных частей робота-уборщика 100 для осуществления работ по уборке. Когда робот-уборщик 100 не используется, управляющая часть 140 управляет работой соответствующих частей так, что робот-уборщик 100 находится в режиме ожидания, подзаряжая аккумуляторную батарею 150, соединенную с внешним зарядным устройством 200. Таким образом, заряд аккумуляторной батареи 150 может поддерживаться в заданных пределах.
После того как робот-уборщик 100, будучи отсоединенным от внешнего зарядного устройства 200, заканчивает работу по уборке, управляющая часть 140 помогает роботу-уборщику 100 возвратиться к внешнему зарядному устройству 200 и подключиться к нему с использованием сигналов, передаваемых из передающей части 210 внешнего зарядного устройства 200. Более конкретно, управляющая часть 140 обнаруживает сигналы с различными кодами, принятые приемной частью 170, и выдает заранее заданный код управления согласно кодам полученных сигналов. Затем управляющая часть 140 сравнивает этот выходной сигнал с заранее заданным опорным значением и на основе результата сравнения вырабатывает цифровой сигнал. Согласно этому выходному цифровому сигналу управляющая часть 140 управляет приводной частью 120 так, что робот-уборщик 100 может возвратиться к зарядной опоре 220 внешнего зарядного устройства 200.
На фиг.4 показано внешнее зарядное устройство 200, которое содержит зарядную опору 220 с зарядными клеммами 222 и передающую часть 210. Зарядные клеммы 222 соединены с силовым проводом 244 через внутренний трансформатор, преобразователь и силовой кабель и предназначены для подачи электроэнергии в аккумуляторную батарею 150 робота-уборщика 100, соединенную с соединительными клеммами 152. Зарядная опора 220 удерживает зарядные клеммы 222 так, чтобы они были расположены на высоте, соответствующей высоте соединительных клемм 152 в роботе-уборщике 100, и фиксируют зарядные клеммы 222 в определенном положении. Если сетевой источник переменного тока является трехфазным, в зарядной опоре 220 устанавливают три зарядные клеммы 222.
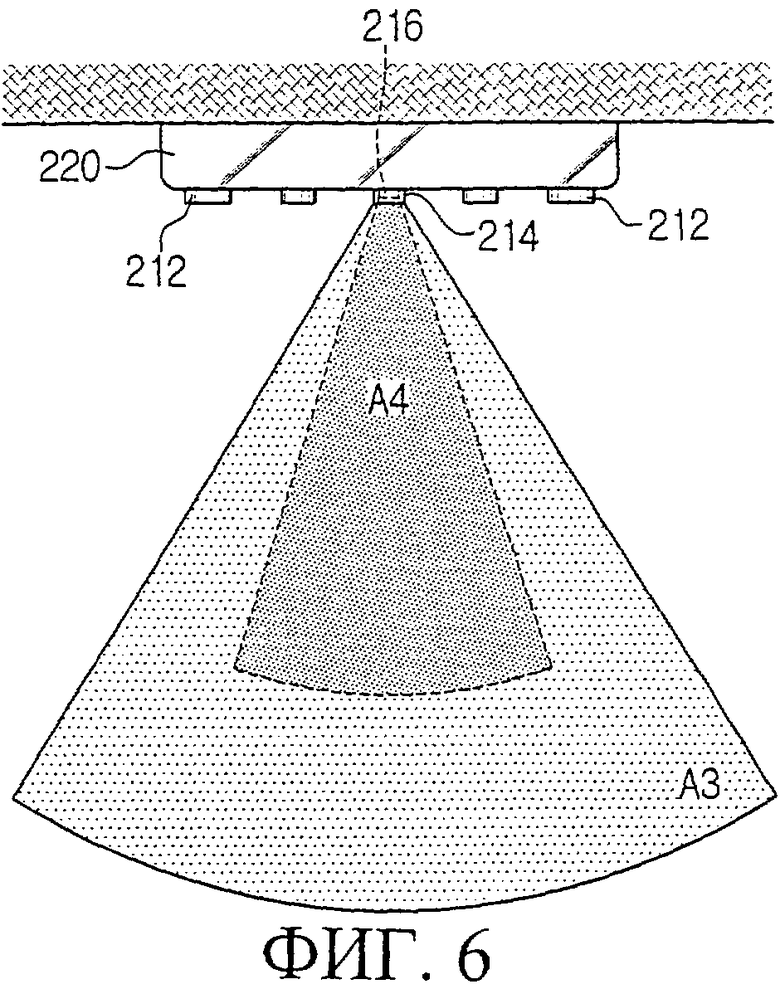
Передающую часть 210 устанавливают на передней стороне зарядной опоры 220, так чтобы приемная часть 170 робота-уборщика могла принять сигналы, посланные передающей частью 210. Передающая часть 210 содержит два дальнодействующих передатчика 212, предназначенных для посылки сигналов различной мощности, близкодействующий передатчик 214 и стыковочный индукционный передатчик 216. Дальнодействующие передатчики 212 установлены на противоположных краях зарядной опоры 220. Близкодействующий передатчик 214 и стыковочный индукционный передатчик 216 предпочтительно расположены между дальнодействующими передатчиками 212, то есть приблизительно в середине зарядной опоры 220. Для надежного приема сигналов приемной частью 170 робота-уборщика 100 дальнодействующие передатчики 212 и близкодействующий передатчик 214 расположены на одной линии. Кроме того, стыковочный индукционный передатчик 216 расположен выше или ниже близкодействующего передатчика 214 на заданном расстоянии, так чтобы не перекрываться с близкодействующим передатчиком 214. Множество передающих частей 210 предпочтительно выполнены в виде инфракрасных излучающих элементов, например в виде светодиодов, которые генерируют инфракрасный сигнал. В качестве приемной части 170 робота-уборщика 100 можно использовать фотодиод, фототранзистор и p-i-n фотодиод.
Дальнодействующие передатчики 212, близкодействующий передатчик 214 и стыковочный индукционный передатчик 216 посылают сигналы с различными кодами, так что приемная часть 170 робота-уборщика 100 может селективно принимать соответствующие различные сигналы. Коды могут различаться, например, различной величиной или формой волны инфракрасного сигнала, передаваемого соответствующими передатчиками 212, 214 и 216.
На фиг.5 и 6 показано, что дальнодействующие передатчики 212, близкодействующий передатчик 214 и стыковочный индукционный передатчик 216 посылают сигналы с соответствующими различными мощностями и углами передачи. Можно установить разную мощность сигналов для множества передатчиков 212, 214 и 216 путем управления сопротивлениями в цепи соответствующих инфракрасных излучающих элементов. Следовательно, можно управлять выходным током и, таким образом, мощности сигналов можно сделать различными. Позициями А1-А4 обозначены дальности и углы передачи (ниже называемые "зонами передачи") сигналов передатчиками 212, 214 и 216. Более конкретно, А1 и А2 обозначают зоны передачи дальнодействующих передатчиков 212, A3 обозначает зону передачи близкодействующего передатчика 214 и А4 обозначает зону передачи стыковочного индукционного передатчика 216. Как показано на фиг.5 и 6, размеры зон передачи уменьшаются в следующей последовательности: дальнодействующий передатчик 212, близкодействующий передатчик 214 и стыковочный индукционный передатчик 216. Таким образом, зоны А1 и А2 передачи дальнодействующего передатчика 212 являются наибольшими, зона А4 передачи стыковочного индукционного передатчика 216 является наименьшей, а зона A3 передачи близкодействующего передатчика 214 является промежуточной между зонами А1/А2 и A3 передачи.
Следовательно, возвращаясь к внешнему зарядному устройству 200, робот-уборщик 100 сначала обнаруживает сигналы, посланные дальнодействующим передатчиком 212, и приближается к зарядной опоре 220. Поскольку дальнодействующий передатчик 212 и близкодействующий передатчик 214 передают сигналы с различными кодами, в области, где сигналы дальнодействующего передатчика 212 и близкодействующего передатчика 214 смешиваются, другими словами, в области, где зоны А1, А2 и A3 перекрываются, управляющая часть 140 робота-уборщика 100 способна различать разные сигналы, полученные приемной частью 170. Зона А4 передачи сигналов, посланных стыковочным индукционным передатчиком 216, установлена меньшей, чем зона A3 передачи сигналов от близкодействующего передатчика 214. После того, как робот-уборщик 100 подходит к зарядной опоре 220 на заданное расстояние, соединительные клеммы 152 робота-уборщика 100 соединяются с зарядными клеммами 222 зарядной опоры 220. При этом угловой диапазон посылаемого сигнала стыковочного индукционного передатчика 216 установлен настолько малым, что приемная часть 170 робота-уборщика 100 получает сигналы от стыковочного индукционного передатчика 216 только в ограниченной области А4. Соответственно, соединительные клеммы 152 робота-уборщика 100 можно должным образом соединить с зарядными клеммами 222.
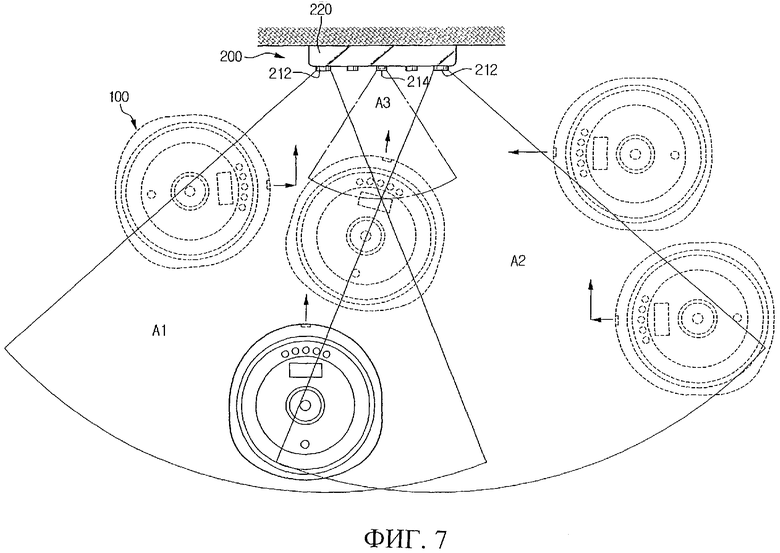
Ниже со ссылками на фиг.7-9 описан способ возврата робота-уборщика 100 к внешнему зарядному устройству 200.
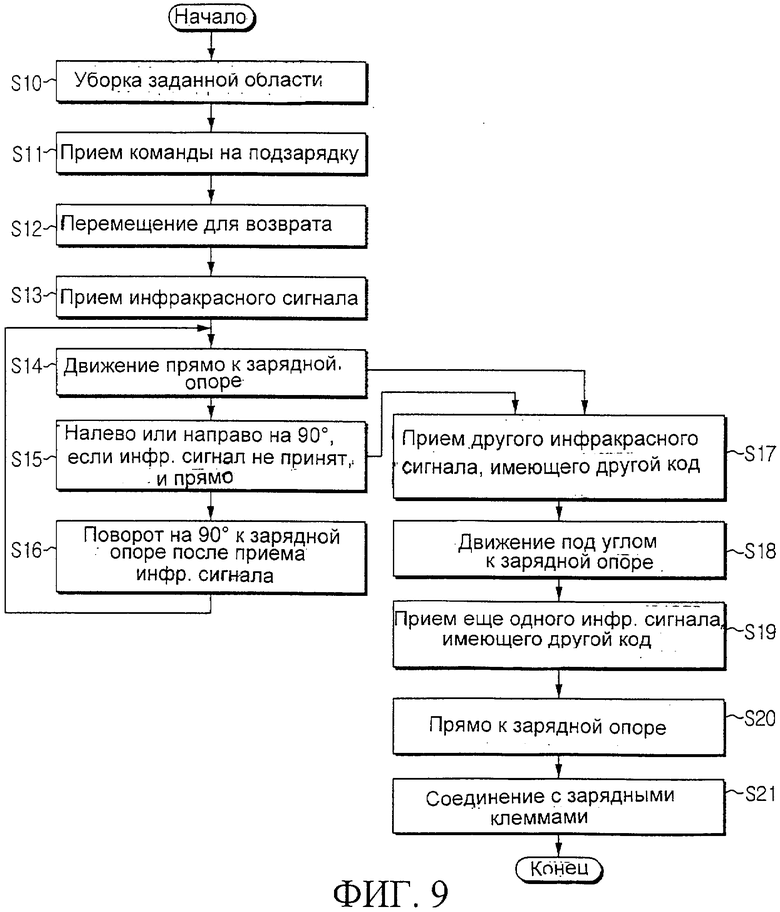
Когда автоматическая система уборки, содержащая внешнее зарядное устройство 200, находится в исходном состоянии, робот-уборщик 100 находится в режиме ожидания, а соединительные клеммы 152 соединены с зарядными клеммами 222 внешнего зарядного устройства 200. После получения сигнала запроса на уборку робот-уборщик 100 отделяется от внешнего зарядного устройства 200 и убирает (S10) область, заданную командой пользователя.
После получения (S11) сигнала запроса подзарядки в процессе работы по уборке, управляющая часть 140 робота-уборщика 100 переходит в режим возврата, чтобы возвратить робота-уборщика 100 к зарядной опоре 220 (S12). Управляющая часть 140 заставляет робота-уборщика 100 продолжать движение до тех пор, пока он не получит сигналы, передаваемые передающей частью 210 зарядной опоры 220. Можно использовать разнообразные способы работы робота-уборщика 100 в режиме возврата. Например, робот-уборщик 100 может двигаться зигзагами или взад и вперед до тех пор, пока приемная часть 170 не получит сигналы, посланные передающей частью 210.
Сигнал запроса подзарядки выдается, когда робот-уборщик 100 заканчивает работу по очистке или когда этот сигнал запроса подзарядки вводится блоком 160 измерения величины заряда аккумулятора во время работы по уборке. Альтернативно, пользователь может принудительно генерировать сигнал запроса подзарядки во время работы по уборке, используя пульт дистанционного управления.
Когда робот-уборщик 100 приближается к зоне А1 или А2 передачи инфракрасных сигналов, посылаемых дальнодействующими передатчиками 212 передающей части 210, приемная часть 170 принимает сигналы (S13), а управляющая часть 140 так управляет роботом-уборщиком 100, чтобы он приблизился к зарядной опоре 220 внешнего зарядного устройства 200. Более конкретно, управляющая часть 140 заставляет приемную часть 170 повернуться к зарядной опоре 220 и командует роботу-уборщику 100 идти (S14) прямо к зарядной опоре 220.
Если при движении к зарядной опоре 220 робот-уборщик 100 выходит за пределы зон А1 или А2 передачи инфракрасных сигналов, то робот-уборщик 100 поворачивается направо или налево приблизительно на 90° и двигается (S15) вперед. Когда в процессе движения вперед робот-уборщик 100 получает инфракрасные сигналы от дальнодействующего передатчика 212, робот-уборщик 100 вновь поворачивается (S16) приблизительно на 90°, чтобы снова оказаться повернутым к зарядной опоре 220, и двигается вперед к передней стороне зарядной опоры 220.
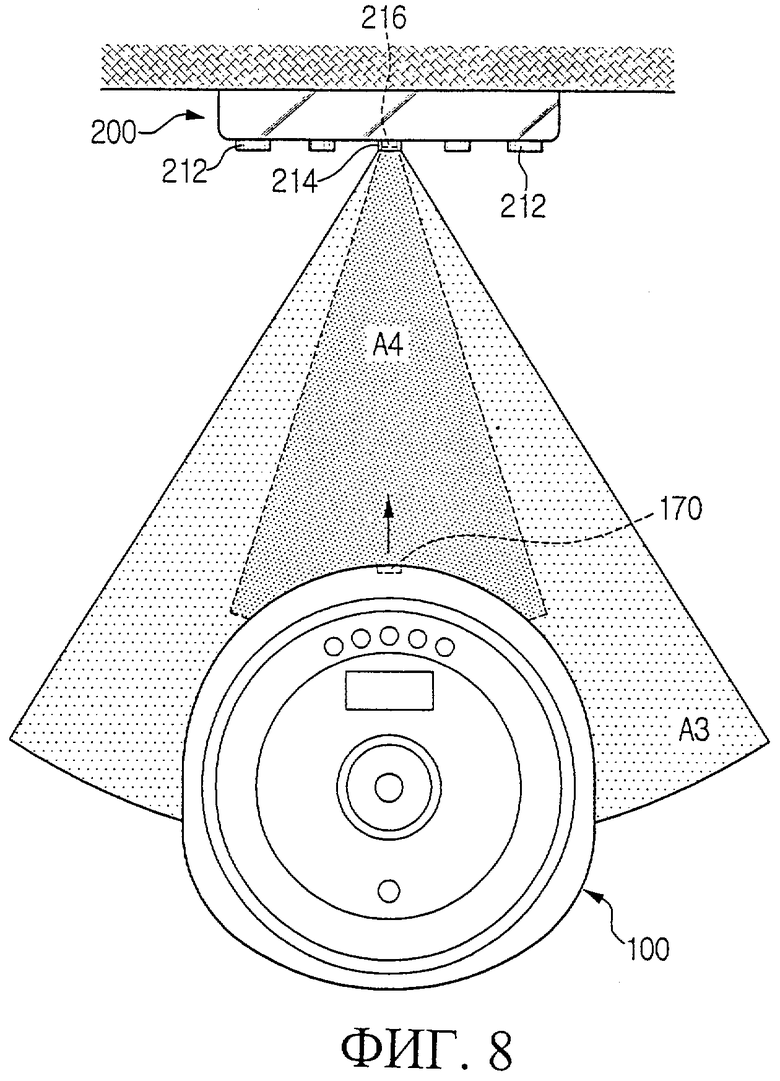
Когда при своем движении прямо к зарядной опоре 220 робот-уборщик 100 оказывается в зоне A3 передачи инфракрасных сигналов, посылаемых близкодействующим передатчиком 214, приемная часть 170 оказывается в состоянии принимать (S17) инфракрасные сигналы. Поскольку близкодействующий передатчик 214 и дальнодействующий передатчик 212 передают инфракрасные сигналы с различными кодами, управляющая часть 140 может различать инфракрасные сигналы с различными кодами, полученные приемной частью 170.
Когда приемная часть 170 получает инфракрасные сигналы от близкодействующего передатчика 214, управляющая часть 140 заставляет робота-уборщика 100 перемещаться (S18) под углом приблизительно 45° к зарядной опоре 220. Перемещение робота-уборщика 100 под углом вместо его перемещения перпендикулярно к зарядной опоре 220 способствует быстрому достижению роботом-уборщиком 100 зарядной опоры 220 за счет уменьшения ошибки, которая может быть обусловлена относительно узкой зоной A3 передачи близкодействующего передатчика 214.
Когда робот-уборщик 100, находясь в пределах зоны А4 передачи, получает (S19) инфракрасные сигналы от стыковочного индукционного передатчика 216, управляющая часть 140 заставляет робота-уборщика 100 повернуться к зарядной опоре 220 так, чтобы робот-уборщик двигался (S20) вперед прямо к ней.
Согласно вышеизложенному, робот-уборщик 100 может быстро и без ошибок достичь зарядных клемм 222 зарядной опоры 220 и подключиться (S21) к ним.
Как очевидно из вышеизложенного описания автоматической системы уборки согласно одному из вариантов выполнения изобретения, предусмотрено множество передающих частей для варьирования кодов и мощностей соответствующих выходных сигналов внешнего зарядного устройства 200, чтобы приемная часть 170 и управляющая часть 140 получали и анализировали соответствующие различные сигналы. Следовательно, робот-уборщик 100 способен быстро возвратиться к внешнему зарядному устройству 200.
Кроме того, согласно одному из вариантов выполнения настоящего изобретения приемная часть 170 робота-уборщика 100 непосредственно получает инфракрасные сигналы от передающей части 210 внешнего зарядного устройства 200. В отличие от обычного способа косвенного приема сигналов, непосредственный способ получения сигналов позволяет повысить дальность обнаружения и снизить стоимость производства.
Хотя настоящее изобретение было проиллюстрировано и описано в отношении определенных вариантов его выполнения, специалистам в данной области техники понятно, что могут быть сделаны различные изменения в форме и деталях без выхода за рамки изобретения, которые определяются формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ СИСТЕМА УБОРКИ ПОМЕЩЕНИЯ С ПАРКОВОЧНЫМ МОДУЛЕМ ДЛЯ РОБОТА-ПЫЛЕСОСА | 2010 |
|
RU2430672C1 |
| СИСТЕМА И СПОСОБ ВОЗВРАЩЕНИЯ РОБОТА-ПЫЛЕСОСА К ЗАРЯДНОМУ УСТРОЙСТВУ | 2006 |
|
RU2338639C9 |
| СПОСОБ КОРРЕКЦИИ КООРДИНАТ РОБОТА-УБОРЩИКА И АВТОМАТИЧЕСКАЯ СИСТЕМА УБОРКИ С ИСПОЛЬЗОВАНИЕМ ЭТОГО СПОСОБА | 2005 |
|
RU2283750C1 |
| РОБОТИЗИРОВАННАЯ СИСТЕМА ЧИСТКИ, БАЗОВАЯ СТАНЦИЯ И СПОСОБ ЕЕ УПРАВЛЕНИЯ | 2019 |
|
RU2777408C1 |
| Система и способ для ведения автоматического очистительного устройства по траектории | 2013 |
|
RU2628970C2 |
| ДОМАШНЯЯ СЕТЕВАЯ СИСТЕМА, ИСПОЛЬЗУЮЩАЯ САМОДВИЖУЩИЙСЯ РОБОТ (ВАРИАНТЫ) | 2006 |
|
RU2312579C2 |
| СПОСОБ ЗАРЯДКИ ОБСЛУЖИВАЮЩЕГО РОБОТА (ВАРИАНТЫ) | 2007 |
|
RU2350253C2 |
| СПОСОБ КОРРЕКЦИИ ГИРОСКОПИЧЕСКОГО ДАТЧИКА РОБОТА-УБОРЩИКА | 2005 |
|
RU2295704C2 |
| МОБИЛЬНАЯ РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА С НЕСКОЛЬКИМИ СМЕННЫМИ РАБОЧИМИ МОДУЛЯМИ И СПОСОБ УПРАВЛЕНИЯ ЭТОЙ СИСТЕМОЙ | 2006 |
|
RU2313442C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ УБОРКИ, РОБОТ-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ-УБОРЩИКОМ | 2014 |
|
RU2620236C1 |
Автоматическая система уборки содержит внешнее зарядное устройство, содержащее зарядную опору с зарядными клеммами, и множество передающих частей, предназначенных для посылки сигналов с различными кодами и мощностями. Робот-уборщик содержит аккумуляторную батарею, соединительные клеммы для соединения с зарядными клеммами для подачи электроэнергии в аккумуляторную батарею, приемную часть для получения сигналов от передающих частей и управляющую часть для управления перемещением робота-уборщика с использованием сигналов, принятых приемной частью так, чтобы соединительные клеммы оказались соединены с зарядными клеммами. Технический результат заключается в создании автоматической системы уборки, обладающей преимуществом в отношении стоимости изготовления, и создании способа возврата робота-уборщика к внешнему зарядному устройству. 3 н. и 17 з.п. ф-лы, 9 ил.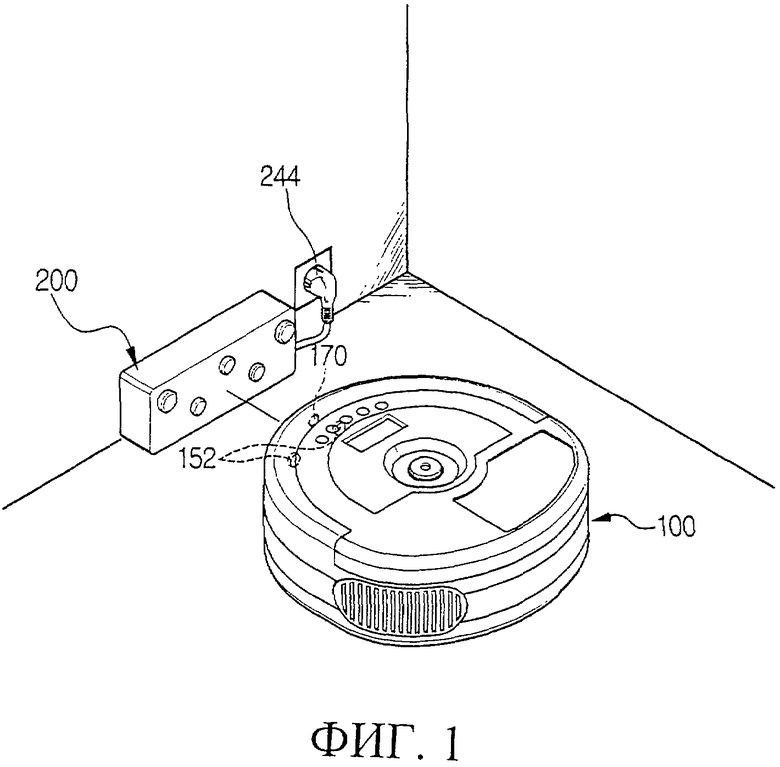
| WO 2004006034 A3, 15.01.2004 | |||
| US 6389329 В1, 14.05.2002 | |||
| Стеклокерамическое покрытие | 1987 |
|
SU1435555A1 |
| ПЫЛЕСОС С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 1997 |
|
RU2127997C1 |

