Предложенный способ относится к тепловизионной технике и может быть использован в проведении бесконтактной диагностики технического состояния тепловыделяющих объектов в туннелях (например, метрополитена, горнодобывающих шахт).
В туннелях, как правило, необходимо контролировать следующие тепловыделяющие объекты:
- места подключения питающих кабелей к контактному рельсу;
- дроссели-трансформаторы;
- рельсовые стыки;
- муфты настенных кабелей,
а также обнаруживать и распознавать места повышенной влажности стен туннелей, наличие трещин и т.п.
Дефекты указанных объектов контроля характеризуются следующими параметрами:
- наличием локальных участков температурных аномалий;
- величина температурной аномалии составляет 40-120°С - для тепловыделяющих объектов и 0,5-1,5°С для аномальных стен.
Причиной возникновения дефектных участков тепловыделяющих объектов - температурных аномалий, является их повышенное электрическое сопротивление, вследствие чего происходит их разогрев и разрушение, что, в свою очередь, ведет к отказам техники или другим серьезным дефектам.
Проведенный анализ существующих средств теплового контроля взаимно перемещающихся объектов показал, что в большинстве случаев применяется способ с покадровой регистрацией информации. Регистрация температурного поля осуществляется по кадрам, которые формируются оптической системой тепловизионной системы. Контроль объекта по всей площади осуществляется путем взаимного перемещения контролируемого объекта и тепловизионной системы и соответственно кадра [1].
В качестве прототипа выбран наиболее близкий к предложенному способ теплового неразрушающего контроля металлопроката в техническом цикле листопрокатного стана [2].
Недостатком известного способа является то, что, используя его, нельзя обеспечить сплошного (без пропусков) просмотра контролируемой поверхности. В те доли секунды, когда оптической системой происходит формирование очередного кадра, тепловизионная система и контролируемая поверхность продолжают взаимно перемещаться, и участок поверхности, пройденный в это время, остается не просмотренным, образуется пропуск в информации о состоянии контролируемой поверхности в этот момент времени. Кроме того, нельзя получить достоверные сведения о контролируемой поверхности, осуществляя известный способ в реальном времени движения, так как при этом имеет место регистрация двойного изображения.
Предложенный способ направлен на устранение указанных выше недостатков.
Технический результат получают путем обеспечения 100% вероятности регистрации аномальных температурных объектов контролируемой поверхности в реальном времени движения.
Признаки прототипа, являющиеся общими с заявленным способом, заключаются в том, что контроль поверхности осуществляют путем перемещения тепловизионной системы с оптической системой, при этом регистрируют температурное поле поверхности, находящееся в поле обзора тепловизионной системы, по кадрам, которые формируют оптической системой.
Новым в предложенном техническом решении является то, что перед началом контроля задают величину перемещения поля обзора тепловизионной системы за время регистрации температурного поля поверхности одного кадра меньше величины поля зрения оптической системы, для чего устанавливают тепловизионную систему сканирования так, что поле зрения ее оптической системы образует угол β с нормалью к направлению движения тепловизионной системы, причем βmin≤β≤βmax, величину угла βmin определяют из условия:

где:
βmin -минимально допустимый угол между нормалью к направлению движения тепловизионной системы и полем зрения ее оптической системы;
2α - поле зрения оптической системы, тепловизионной системы;
А - расстояние от оптической системы до контролируемой поверхности;
ΔSmax - предельное значение расфокусировки оптической системы на краях кадра,
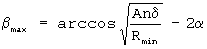
а величину βmax определяют из выражения:
где:
βmax - максимально допустимый угол между нормалью к направлению движения тепловизионной системы и полем зрения ее оптической системы;
n - коэффициент запаса по геометрической разрешающей способности (обычно n=3÷7);
Rmin - размер минимального дефекта;
А - расстояние от оптической системы до контролируемой поверхности;
δ - угловая разрешающая способность тепловизионной системы;
2α - поле зрения оптической системы тепловизионной системы,
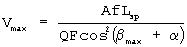
и определяют наибольшее значение линейной скорости перемещения V тепловизионной системы исходя из зависимости:
где:
Vmax - наибольшее значение линейной скорости перемещения тепловизионной системы;
Lзр - поле обзора тепловизионной системы;
Q - коэффициент увеличения оптической системы тепловизионной системы;
А - расстояние от оптической системы до контролируемой поверхности;
f - частота сканирования тепловизионной системы;
F - фокусное расстояние оптической системы тепловизионной системы;
2α - поле зрения оптической системы тепловизионной системы;
βmax - угол между нормалью к направлению движения тепловизионной системы и полем зрения ее оптической системы,
а в процессе регистрации температурного поля контролируемой поверхности в каждом кадре смещают поле обзора тепловизионной системы с угловой скоростью ω, где ωmin≤ω≤ωmax, причем


где:
 - соответственно минимально и максимально допустимое
- соответственно минимально и максимально допустимое
значение угловой скорости смещения поля обзора тепловизионной системы;
Δω - допустимая погрешность угловой скорости смещения поля обзора тепловизионной системы;
V - линейная скорость перемещения тепловизионной системы;
ΔV - величина случайного изменения линейной скорости перемещения тепловизионной системы;
 - радиус-вектор оптической оси оптической системы тепловизионной системы, где r - отрезок оптической оси, заключенный между оптической системой и контролируемой поверхностью,
- радиус-вектор оптической оси оптической системы тепловизионной системы, где r - отрезок оптической оси, заключенный между оптической системой и контролируемой поверхностью,
при этом период смещения поля обзора тепловизионной системы определяют из условия:
где:
Lзр - поле обзора тепловизионной системы;
V - линейная скорость перемещения тепловизионной системы;
τразв. - период смещения поля обзора тепловизионной системы,
а амплитуду смещения поля обзора тепловизионной системы определяют из зависимости:
γ=2α,
где:
γ - амплитуда смещения поля обзора тепловизионной системы;
2α - поле зрения оптической системы тепловизионной системы,
по результатам контроля получают термограммы, позволяющие обнаружить в реальном времени дефекты в виде температурных аномалий тепловыделяющих объектов.
Предложенный способ поясняется схемами:
- фиг.1 - схема реализации способа;
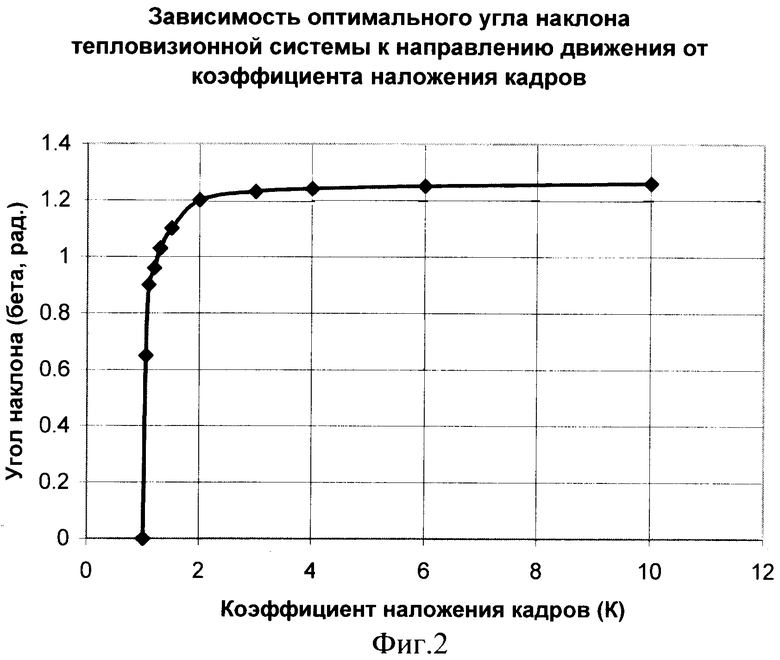
- фиг.2 - зависимость оптимального угла β от коэффициента к наложения кадра;
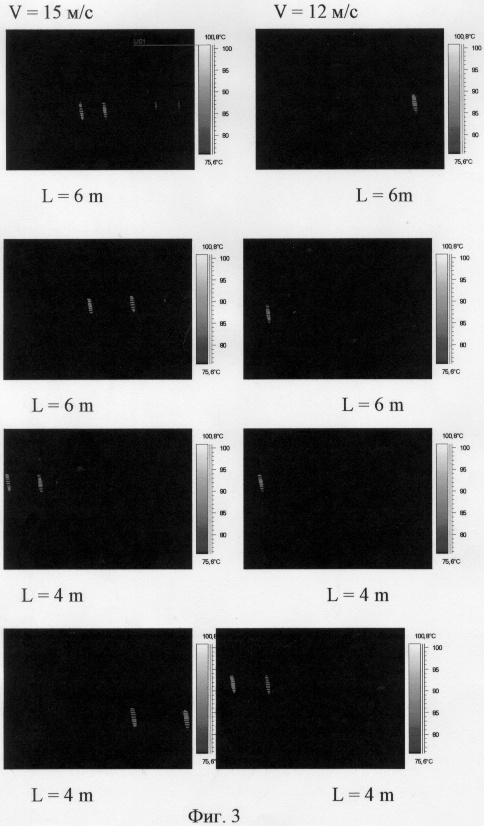
- фиг.3 - термограммы стендовых испытаний (после предварительной математической обработки);
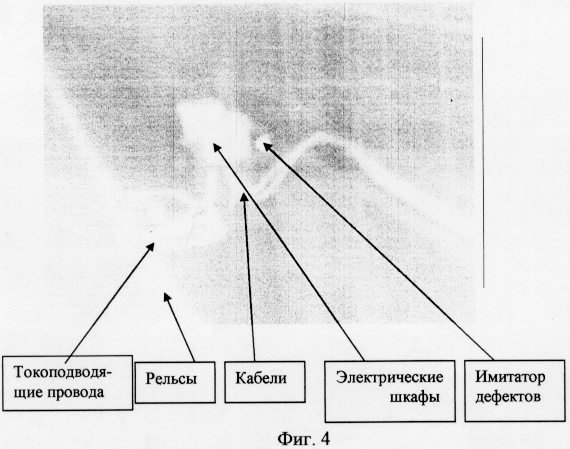
- фиг.4 - термограмма участка туннеля с имитатором дефектов;
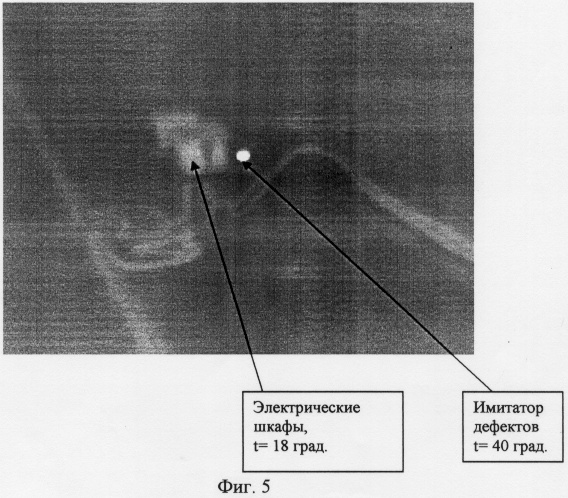
- фиг.5 - термограмма участка туннеля после предварительной математической обработки;
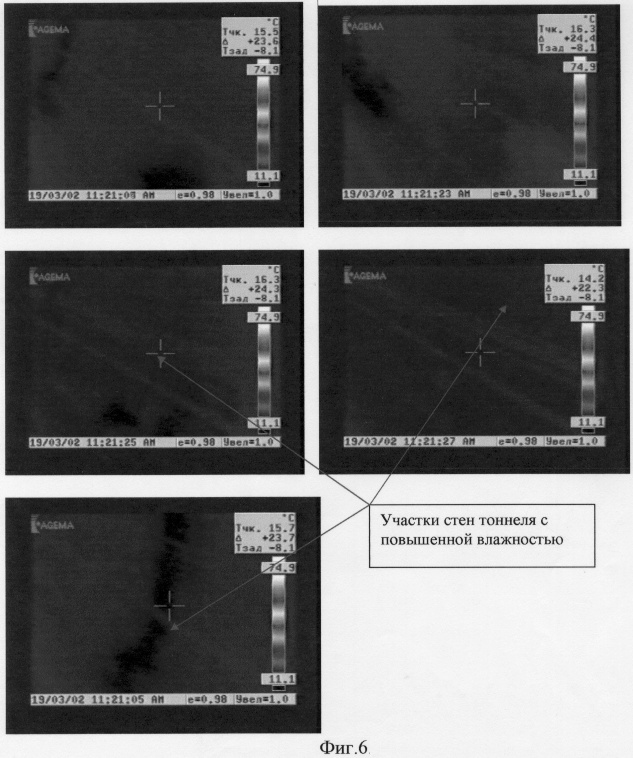
- фиг.6 - термограммы участков туннеля с повышенной влажностью стен (после предварительной математической обработки).
Перед началом осуществления способа задают условие контроля, при котором будет обеспечено обследование 100% площади контролируемой поверхности стены туннеля в реальном времени эксплуатации. Экспериментально было установлено, что для этого величина перемещения поля обзора тепловизионной системы сканирования за время регистрации температурного поля поверхности одного кадра должна быть меньше величины поля зрения ее оптической системы.
Из заданного условия по установленной авторами зависимости рассчитывают угол β, под которым устанавливают тепловизионную систему сканирования, ее линейную скорость перемещения V и угловую скорость смещения ω, период и амплитуду смещения тепловизионной системы в процессе регистрации температурного поля контролируемой поверхности в каждом кадре.
После задания условия и произведенных расчетов в вагоне-лаборатории 1 устанавливают две тепловизионные системы 2 и 3 с приспособлениями для вращения соответственно 4 и 5 и с оптическими системами соответственно 6 и 7. Причем тепловизионные системы 2 и 3 устанавливают так, что поля зрения их оптических систем соответственно 4 и 5 образуют угол β с нормалью к направлению движения вагона-лаборатории 1 и тепловизионных систем 2 и 3.
Приводят вагон-лабораторию 1 в движение со скоростью V по рельсам 8 туннеля 9. В процессе движения вагона-лаборатории 1 тепловизионными системами 2 и 3 производят регистрацию температурных полей соответственно поверхностей 10 и 11 туннеля 9 по кадрам, которые формируются оптическими системами соответственно 6 и 7. В процессе регистрации температурных полей поверхностей 10 и 11 в каждом кадре смещают с помощью приспособлений для вращения 4 и 5 поля обзора тепловизионных систем сканирования соответственно 2 и 3 с угловой скоростью ω с определенным периодом τразв. и амплитудой γ смещения. Все результаты измерений поступают через карту памяти 12 в ЭВМ 13.
Для обеспечения регистрации теплового поля 100% площади стены туннеля в ЭВМ необходим специальный контроллер, позволяющий осуществлять запись и регистрацию видеоизображений температурных полей в ЭВМ в реальном времени - в темпе поступления информации.
Видеоизображения, записанные таким образом в ЭВМ, возможно обрабатывать специальными программами, реализующими различные математические методы обработки с целью обеспечения обнаружения и распознавания дефектов с необходимой достоверностью.
Пример реализации предложенного способа.
Примем следующие исходные данные:
А=3,2 м
V=15 м/c
f=25 Гц
F=0,04 м
2α=20 град
К=1, 2, 4, 6, 8, 10
Зависимость угла β от коэффициента К наложения кадров приведена на фиг.2.
При экспериментальных исследованиях в качестве имитатора аномалии температурного поля использовался бытовой паяльник, нагреваемый до температуры 40-250°С. Для смещения тепловизионной системы использовалось приспособление с заданной угловой скоростью.
В качестве ЭВМ - компьютерная система сбора и обработки видеоизображений температурных полей.
В качестве тепловизионной системы использовался тепловизор марки Thermovision-550 AGEMA.
Стендовые экспериментальные исследования проводились следующим образом.
Режимы экспериментальных исследований приведены в таблице 1.1
Значение А и V при проведении экспериментальных работ выбирались из условий проведения реального контроля. При этом V<Vmax, a A определялась с учетом оптимального значения угла β. Величина угловой скорости рассчитывалась по формуле:

Далее определялось отношение времени прохождения изображения по фотоматрице к времени регистрации кадра (столбец 6, табл. 1.1), где
tкадра=1/f=0.04 с
Результаты экспериментальных исследований в виде термограмм приведены на фиг.3. На приведенных термограммах на фоне однородного темного фона ясно видны изображения (двойные и одинарные) источника температурной аномалии (бытового паяльника).
Из анализа дефектограмм, приведенных на фиг.3, следует, что в полном соответствии с результатами теоретических исследований при максимальной угловой экспериментальной скорости вращения тепловизионной системы обеспечивается 100%-я вероятность регистрации аномальных температурных объектов.
При меньшей угловой скорости обеспечивается регистрация двойного изображения (столбец 6, таблица 1.1).
Из анализа результатов экспериментальных исследований следует, что возможны увеличения скорости перемещения тепловизионной системы в 1,1-1,4 раза при условии обеспечения достоверной регистрации температурных аномалий 40-200°С. Это справедливо при отсутствии шумов и помех. В случае наличия шумов и помех достаточно больших значений необходима разработка и использование специальных математических методов обнаружения и идентификации дефектов на основе специально проведенных теоретических и экспериментальных исследований. В т.ч. необходимо провести исследования уровня и характера шумов и помех.
Проведенные стендовые экспериментальные исследования позволяют сделать следующие рекомендации для проведения натурных исследований.
1. Исследования целесообразно производить при двух значениях скорости: 0 м/с, 40 км/ч.
2. Расстояние А от оптической системы до контролируемых поверхностей целесообразно выбирать в диапазоне 4-6 м.
3. Для обеспечения необходимой достоверности экспериментальных результатов целесообразно дублировать результаты регистрации на видеомагнитофон в реальном времени в процессе движения поезда.
Дефект имитировался специальным нагревательным элементом размером 1×3 см, расположенным на боковой стене тоннеля на высоте, ориентировочно, 1 м от его основания. Температура имитатора составляла 40-50 град.С.
Экспериментальные исследования заключались в регистрации температурного поля стен тоннеля при двух режимах движения:
V=0 м/с (регистрация в момент полной остановки вагона-лаборатории для настройки аппаратуры и предварительной методики контроля);
V=40 км/ч.
Угол наклона тепловизора составлял β=25 град.
Видеоизображения, зарегистрированные в ЭВМ с видеомагнитофона, не позволяют производить специальную математическую обработку и могут использоваться только как иллюстративные.
Некоторые результаты экспериментальных исследований в виде термограмм приведены на фиг.4 и фиг.5.
Проведем краткий анализ представленных данных.
На фиг.4 отображены: дефект (отмечен стрелкой), электрические шкафы, рельсы и токопроводящие провода. Все эти элементы имеют температуру, превышающую температуру стенки тоннеля.
Из данного чертежа видно, что непосредственно по видеоизображению выделить имитатор затруднительно вследствие имеющихся других объектов с температурными аномалиями. В данном конкретном случае имелась возможность использовать имеющиеся методы математической обработки и с их помощью выделить имитатор дефектов на фоне структурных температурных неоднородностей (фиг.5).
Однако в общем случае необходимо использовать специальные математические методы и соответствующее программное обеспечение обнаружения и идентификации дефектов.
На фиг.6 приведена термограмма участка поверхности тоннеля с участками подтеков воды на стенках.
Таким образом, тепловой метод позволяет обнаруживать в реальном времени движения вагона-лаборатории дефекты в виде температурных аномалий тепловыделяющих объектов и участки туннеля с повышенной влажностью стен.
Литература
1. А.с. СССР №1469418, кл. G 01 N 25/72 от 10.11.86 г.
2. Книга О.В.Будадин, А.И.Потапов, В.И.Колганов, Т.Е.Троицкий-Марков, Е.В.Абрамова. «Тепловой неразрушающий контроль изделий». Научно-методическое пособие. М.: «Наука», 2002, глава 4, стр.251-262.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля качества многослойных композитных броневых преград из ткани и устройство для его осуществления | 2017 |
|
RU2663414C1 |
| СКАНИРУЮЩИЙ ТЕПЛОВИЗИОННЫЙ ДЕФЕКТОСКОП | 2022 |
|
RU2786045C1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА КОМПОЗИТНЫХ БРОНЕВЫХ ПРЕГРАД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2623700C1 |
| Устройство теплового контроля качества композитных броневых преград | 2015 |
|
RU2608491C1 |
| Способ дефектоскопии в полимерных конструкциях с сотовым заполнителем с применением термографии | 2024 |
|
RU2835766C1 |
| СПОСОБ ТЕПЛОВОГО КОНТРОЛЯ НАДЕЖНОСТИ КОНСТРУКЦИЙ ИЗ ПОЛИМЕРНЫХ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ ПО АНАЛИЗУ ВНУТРЕННИХ НАПРЯЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2506575C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗОН КОНЦЕНТРАЦИИ НАПРЯЖЕНИЙ В СТРОИТЕЛЬНЫХ КОНСТРУКЦИЯХ | 2006 |
|
RU2315271C1 |
| СПОСОБ ДИАГНОСТИКИ СОСУДИСТОЙ ПАТОЛОГИИ ПУТЕМ АКТИВНОГО ТЕРМОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ | 2009 |
|
RU2428102C1 |
| СПОСОБ ДИАГНОСТИКИ ЭКСПЛУАТАЦИОННОГО СОСТОЯНИЯ ФУРМЕННОЙ ИЛИ ОПАСНОЙ ЗОНЫ ПИРОМЕТАЛЛУРГИЧЕСКОГО АГРЕГАТА | 2007 |
|
RU2366936C2 |
| СПОСОБ ТЕПЛОВОГО КОНТРОЛЯ ОСТАТОЧНЫХ НАПРЯЖЕНИЙ И ДЕФЕКТОВ КОНСТРУКЦИЙ | 2007 |
|
RU2383009C2 |
Изобретение относится к измерительной технике. Способ осуществляют путем перемещения тепловизионной системы относительно контролируемой поверхности. Во время перемещения регистрируют тепловизионной системой температурное поле поверхности по кадрам. Перед началом осуществления контроля поле зрения оптической системы образует угол βmin≤β≤βmax с нормалью к направлению движения тепловизионной системы. Определяют по установленным зависимостям угол βmin и βmax и наибольшую величину линейной скорости V перемещения тепловизионной системы. В процессе перемещения в каждом кадре смещают радиус-вектор  оптической оси оптической системы и поле обзора тепловизионной системы с угловой скоростью ωmin≤ω≤ωmax. Определяют по установленным зависимостям период смещения τразв и амплитуду смещения γ. Технический результат - обеспечение 100%-ой вероятности регистрации аномальных температурных объектов контролируемой поверхности в реальном времени движения. 1 табл., 6 ил.
оптической оси оптической системы и поле обзора тепловизионной системы с угловой скоростью ωmin≤ω≤ωmax. Определяют по установленным зависимостям период смещения τразв и амплитуду смещения γ. Технический результат - обеспечение 100%-ой вероятности регистрации аномальных температурных объектов контролируемой поверхности в реальном времени движения. 1 табл., 6 ил.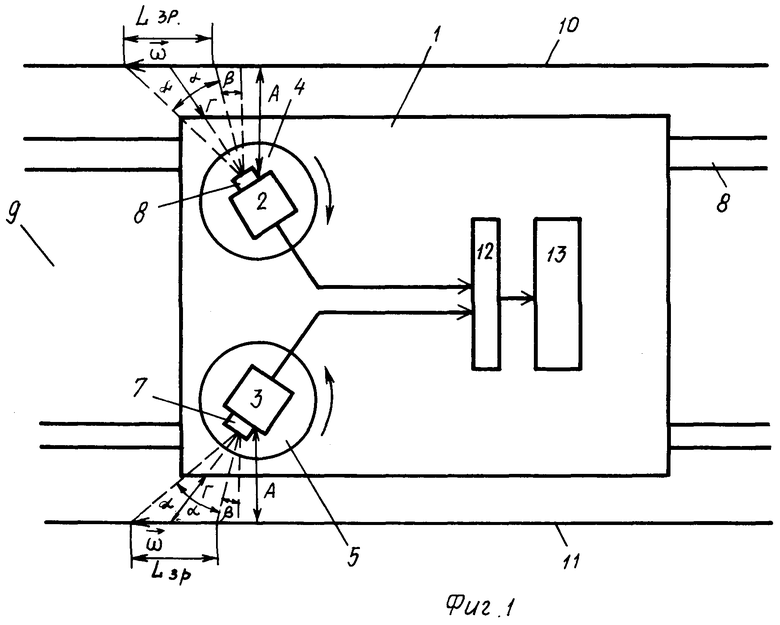
Способ неразрушающего контроля поверхности туннеля, согласно которому контроль осуществляют путем перемещения тепловизионной системы с оптической системой и регистрации температурного поля поверхности, находящейся в поле обзора тепловизионной системы, по кадрам, которые формируют оптической системой, отличающийся тем, что перед началом контроля задают величину перемещения поля обзора тепловизионной системы за время регистрации температурного поля поверхности в пределах одного кадра меньше величины поля зрения оптической системы, для чего устанавливают тепловизионную систему так, что поле зрения ее оптической системы образует угол β с нормалью к направлению движения тепловизионной системы, причем βmin≤β≤βmax, величину угла βmin определяют из условия

где βmin - минимально допустимый угол между нормалью к направлению движения тепловизионной системы и полем зрения ее оптической системы;
2α - поле зрения оптической системы тепловизионной системы;
А - расстояние от оптической системы до контролируемой поверхности;
ΔSmax - предельное значение расфокусировки оптической системы на краях кадра, а величину βmax определяют из выражения
где
βmax - максимально допустимый угол между нормалью к направлению движения тепловизионной системы и полем зрения ее оптической системы;
n - коэффициент запаса по геометрической разрешающей способности (обычно n=3÷7);
Rmin - размер минимального дефекта;
А - расстояние от оптической системы до контролируемой поверхности;
δ - угловая разрешающая способность тепловизионной системы;
2α - поле зрения оптической системы тепловизионной системы,
и определяют наибольшее значение линейной скорости перемещения Vmax тепловизионной системы исходя из зависимости
где Vmax - наибольшее значение линейной скорости перемещения тепловизионной системы;
Lзр - поле обзора тепловизионной системы;
Q - коэффициент увеличения оптической системы тепловизионной системы;
А - расстояние от оптической системы до контролируемой поверхности;
f - частота сканирования тепловизионной системы;
F - фокусное расстояние оптической системы тепловизионной системы;
2α - поле зрения оптической системы тепловизионной системы;
βmax - угол между нормалью к направлению движения тепловизионной системы и полем зрения ее оптической системы,
а в процессе регистрации температурного поля контролируемой поверхности в каждом кадре смещают поле обзора тепловизионной системы с угловой скоростью ω, где ωmin≤ω≤ωmax, причем


где ω - угловая скорость смещения поля обзора тепловизионной системы;
Δω - допустимая погрешность угловой скорости смещения поля обзора тепловизионной системы;
V - линейная скорость перемещения тепловизионной системы;
ΔV - величина случайного изменения линейной скорости перемещения тепловизионной системы;
 - радиус-вектор оптической оси оптической системы тепловизионной системы,
- радиус-вектор оптической оси оптической системы тепловизионной системы,
при этом период смещения поля обзора тепловизионной системы определяют из условия
где Lзр - поле обзора тепловизионной системы;
V - линейная скорость перемещения тепловизионной системы;
τразв. - период смещения поля обзора тепловизионной системы,
а амплитуду смещения поля обзора тепловизионной системы определяют из зависимости
γ=2α
где γ - амплитуда смещения поля обзора тепловизионной системы;
2α - поле зрения оптической системы тепловизионной системы,
и получают термограммы, позволяющие обнаружить в реальном времени дефекты в виде температурных аномалий тепловыделяющих объектов.
| БУДАДИН О.Н | |||
| и др | |||
| Тепловой неразрушающий контроль изделий | |||
| М. | |||
| Наука, 2002, с.251-262 | |||
| Тепловой дефектоскоп | 1986 |
|
SU1469418A1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 1997 |
|
RU2114426C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ФОРМЫ КОНЦЕНТРАТОРОВ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ В КОНСТРУКЦИИ ИЗДЕЛИЯ | 1999 |
|
RU2138798C1 |

