Изобретение относится к радиолокационным системам обнаружения источников радиоизлучений (ИРИ) и определения координат и параметров их движения, в частности к угломерным двухпозиционным пассивным радиолокационным системам (УДПРЛС), используемым для оценивания параметров траектории подвижного ИРИ.
В радиолокации весьма обширный и важный класс объектов составляют источники радиоизлучений. При этом наблюдение за такими объектами осуществляется на основе приема излучаемых ими радиосигналов. Широкое применение на практике нашли пассивные многопозиционные радиолокационные системы (РЛС) определения местоположения ИРИ, базирующиеся на пеленгационных методах. Основу пассивных многопозиционных угломерных РЛС составляют двухпозиционные угломерные РЛС, которые могут применяться также и самостоятельно.
Одной из основных задач радиолокационного наблюдения в УДПРЛС является построение траекторий движения ИРИ. Достаточно часто ИРИ движутся равномерно и прямолинейно. Применительно к такому движению параметрами траектории являются координаты ИРИ в прямоугольной системе координат и их первые производные, т.е. проекции вектора скорости ИРИ на оси этой системы координат.
Известна группа способов оценивания параметров траектории ИРИ [Дрогалин В.В., Ефимов В.А., Канащенков А.И. и др. Алгоритмы оценивания координат и параметров движения радиоизлучающих ИРИ в угломерных двухпозиционных бортовых радиолокационных системах. - Информационно-измерительные и управляющие системы, 2003, №1, стр.13-14], в которых параметры траектории ИРИ оценивают по обобщенным замерам проекций пространственного положения ИРИ на оси прямоугольной системы координат, а также группа способов, в которых параметры ИРИ оценивают по обобщенным замерам сферических (полярных) координат ИРИ.
Под обобщенными замерами в литературе по многопозиционным радиолокационным системам понимают измеренные или вычисленные без учета предыдущих измерений координаты пространственного положения ИРИ [там же, стр.5].
В каждом способе, любом из упомянутой выше групп, выполняют следующее:
- в двух приемных позициях (ПП) принимают излучаемые ИРИ радиосигналы, по которым измеряют значения пеленгов ИРИ;
- измеряют координаты ПП и параметры их собственного движения;
- измеренные значения пеленгов ИРИ и собственных координат и параметров движения ПП передают на одну из ПП, где по ним путем функционального преобразования формируют обобщенные замеры координат ИРИ, которые используют далее как первичные измерения для фильтров оценивания координат и параметров движения ИРИ, причем фильтры используют как стационарные (α-β-фильтры, α-β-γ-фильтры), так и нестационарные (адаптивные фильтры, фильтры Калмана).
Отличие упомянутых способов заключается в способе функционального преобразования при формировании обобщенных замеров координат ИРИ:
1) в способах первой, из упомянутых, группы [там же, стр.15-17] используют функциональные преобразования, заключающиеся в пересчете измеренных значений пеленгов ИРИ и собственных координат и параметров движения ПП в проекции пространственного положения ИРИ на оси прямоугольной системы координат;
2) в способах второй, из упомянутых, группы [там же, стр.17-21] используют функциональные преобразования, заключающиеся в пересчете измеренных значений пеленгов ИРИ и собственных координат и параметров движения ПП в сферические (полярные) координаты ИРИ.
Общим недостатком способов первой группы [там же, стр.17] является сложность реализации, обусловленная тем, что координаты ИРИ связаны нелинейными зависимостями с обобщенными замерами, если используются прямоугольные системы координат, что требует применения для оценивания параметров траектории ИРИ устройств нелинейной фильтрации.
Способы второй группы менее сложны, однако в них более низкая точность оценивания параметров траектории ИРИ. Обусловлено это тем, что при формировании обобщенных замеров, для сокращения числа выполняемых операций, в них используют упрощенные устройства фильтрации [там же, стр.17].
Наиболее близким к предлагаемому способу (прототипом) является способ оценивания параметров траектории ИРИ в УДПРЛС при параллельной обработке данных [там же, стр.21], в котором в качестве обобщенных замеров координат ИРИ используют измеренные значения пеленгов ИРИ и собственных координат и параметров движения ПП.
Оценивание параметров траектории ИРИ в прототипе осуществляют следующим образом. В двух приемных позициях принимают излучаемые ИРИ радиосигналы, по которым измеряют значения пеленгов ИРИ. Измеряют координаты приемных позиций и параметры их собственного движения. Измеренные значения пеленгов ИРИ и собственных координат и параметров движения ПП передают на одну из ПП, где в соответствии с формулами нелинейной калмановской фильтрации осуществляют оценивание координат ИРИ и скоростей их изменения.
Достоинством данного способа является то, что при его реализации не нужно выполнять операцию по формированию обобщенных замеров, вносящую дополнительные ошибки в результаты измерений.
Недостатком прототипа является то, что его реализация требует применения устройств нелинейной фильтрации. Объясняется это тем, что в этом случае измеренные значения пеленгов ИРИ связаны нелинейными функциями с оцениваемыми параметрами траектории ИРИ. Поэтому применение данного способа требует реализации достаточно сложных систем нелинейных уравнений для нахождения дисперсий ошибок оценивания в реальном масштабе времени.
Таким образом, задачей изобретения является существенное сокращение вычислительных затрат при низком уровне ошибок оценивания.
Для пояснения существа изобретения на фиг.2 представлено геометрическое расположение ИРИ относительно двух приемных позиций: ПП1 и ПП2 угломерной двухпозиционной радиолокационной системы. Обозначения фиг.2 представлены ниже.
Оценивание параметров траектории ИРИ выполняют следующим образом.
Вначале определяют экстраполированные значения координат xириэ, yириэ и экстраполированные значения азимутов α1э, α2э ИРИ, для чего:
в первой приемной позиции (ПП1):
- измеряют значение азимута α1 ИРИ, а также значения собственных координат x1, y1 ПП1 в земной прямоугольной системе координат;
- передают измеренные значения азимута α1 ИРИ и собственных координат x1, y1 ПП1 во вторую приемную позицию (ПП2);
во второй приемной позиции (ПП2):
- измеряют значения собственных координат х2, у2 ПП2 в той же системе координат, а также значение азимута α2 ИРИ;
- вычисляют значения координат xири, yири ИРИ по формулам [там же, стр.15]


- по формулам
xириэ=xири, yириэ=yири,
полученным при условии, что скорость ИРИ и скорости ПП1 и ПП2 равны нулю, находят xириэ, yириэ - экстраполированные значения координат ИРИ;
- экстраполированные значения координат xириэ, yириэ ИРИ запоминают;
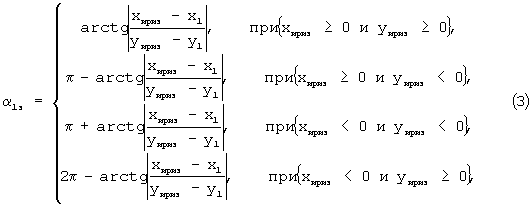
- рассчитывают экстраполированные значения азимутов α1э, α2э ИРИ:
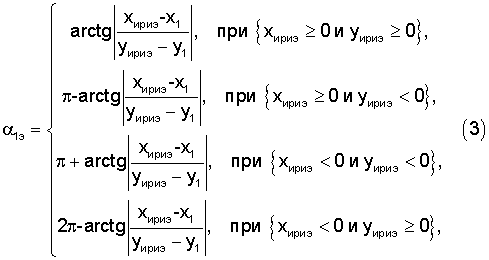
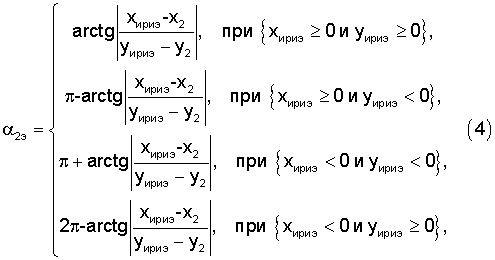
и запоминают их.
Зависимости (3) и (4) получены при решении геометрической задачи (см. фиг.2) нахождения азимутов α1э и α2э, при условии замены значений координат xири и yири значениями координат xириэ и yириэ соответственно.
Затем, на каждом последующем k-м шаге вычислений, отстоящем друг от друга на временной интервал τ, выполняют следующее:
в первой ПП:
- измеряют значение азимута α1 ИРИ и значения собственных координат x1, y1 ПП1 и передают их в ПП2;
во второй ПП:
- измеряют значения собственных координат x2, у2 ПП2 и значение азимута α2 ИРИ;
- по значениям азимутов α1, α2 ИРИ, измеренных соответственно в первой и второй ПП, и координат x1, y1, х2, y2 первой и второй ПП соответственно вычисляют значения коэффициентов чувствительности Kx1, Kx2, Ky1, Кy2:
Kx1={sin(α1-α2)[(x1cosα1+y1sinα1)cosα2+(x2sinα2-y2cosα1)sinα1]-cos(α1-α2)[(x1sinα1-y1cosα1)cosα2+(x2sinα2-y2cosα2)cosα1]}:sin2(α1-α2);

Ky1={sin(α1-α2)[(x1cosα1+y1sinα1)sinα2-(x2sinα2-y2cosα2)cosα1]-cos(α1-α2)[(x1sinα1-y1cosα1)sinα2+(x2sinα2-y2cosα2)sinα1]}:sin2(α1-α2);
Ky2={sin(α1-α2)[(x1sinα1-y1cosα1)cosα2-(x2cosα2+y2sinα2)sinα1]-cos(α1-α2)[(x1sinα1-y1cosα1)sinα2+(x2sinα2-y2cosα2)sinα1]}:sin2(α1-α2).
Физическая сущность коэффициентов чувствительности Kx1, Кх2, Ky1 и Кy2 пояснена в Приложении;
- оценивают значения параметров траектории ИРИ по формулам:






где  - оцененные значения координат ИРИ;
- оцененные значения координат ИРИ;
xириэ, yириэ - экстраполированные значения координат ИРИ;
 - оцененные значения проекций скорости ИРИ на оси прямоугольной системы координат, которые на первом шаге вычислений определяют равными нулю;
- оцененные значения проекций скорости ИРИ на оси прямоугольной системы координат, которые на первом шаге вычислений определяют равными нулю;
ax1, bx1, ay1, by1 и ах2, bx2, ay2, by2 - постоянные коэффициенты усиления фильтров;
τ - временной интервал между измерениями;
k, k-1 - целые числа, обозначающие дискретные моменты времени измерений;
- рассчитывают экстраполированные значения азимутов α1э, α2э ИРИ по формулам (3) и (4).
Экстраполированные значения координат xириэ, yириэ ИРИ и экстраполированные значения азимутов α1э, α2э ИРИ запоминают для использования на следующем шаге измерений.
На фиг.1 представлена упрощенная структурная схема УДПРЛС, в которой может быть реализован заявленный способ оценивания параметров траектории ИРИ, где:
1 - навигационная система ПП1;
2 - угломер ПП1;
3 - аппаратура приема-передачи данных ПП1;
4 - источник радиоизлучений;
5 - угломер ПП2;
6 - аппаратура приема-передачи данных ПП2;
7 - навигационная система ПП2;
8 - вычислительная система ПП2.
Фиг.2 поясняет геометрию решения задачи оценивания параметров траектории ИРИ в УДПРЛС, где обозначено:
OYX - прямоугольная система координат;
ИРИ - источник радиоизлучения;
xири, yири - координаты ИРИ;
ПП1, ПП2 - местоположение первой и второй приемных позиций соответственно;
x1, y1; x2, y2 - координаты ПП1 и ПП2 соответственно;
α1 - азимут ИРИ, измеренный угломером ПП1;
α2 - азимут ИРИ, измеренный угломером ПП2.
В Приложении приведены пояснения к некоторым используемым в заявленном способе формулам.
Рассмотрим функционирование УДПРЛС при использовании заявленного способа оценивания параметров траектории ИРИ в УДПРЛС.
В состав УДПРЛС входят первая и вторая приемные позиции, которые могут быть стационарными либо подвижными. Первая приемная позиция (ПП1) содержит: навигационную систему 1, угломер 2 (называемый часто в литературе пеленгатором), аппаратуру приема-передачи данных 3. Вторая приемная позиция (ПП2) содержит: угломер 5, аппаратуру приема-передачи данных 6, навигационную систему 7, вычислительную систему 8. Принципы функционирования этих устройств подробно описаны в научно-технической литературе, например в [Черняк B.C. Многопозиционная радиолокация. - М.: Радио и связь, 1993, стр.73-74, 392-396], [Радиоэлектронные системы: Основы построения и теория. Справочник /Ширман Я.Д., Лосев Ю.И., Минервин Н.Н. и др./ Под ред. проф. Я.Д. Ширмана. - М.: ЗАО «Маквис», 1998, стр.608], [Теоретические основы радиолокации под ред. проф. Ширмана Я.Д. -М.: Сов. радио, 1970, стр.494-495]. К принципам их построения и функционирования заявляемый способ не предъявляет никаких дополнительных требований, поэтому ниже, при описании функционирования УДПРЛС, используется общая характеристика данных устройств.
После включения УДПРЛС, в вычислительную систему 8 ПП2 вводят значения ax1, bx1, ay1, by1, ax2, bx2, ay2, by2 - постоянных коэффициентов усиления фильтров, а также τ - временной интервал между измерениями.
Источник радиоизлучения 4 излучает радиосигналы, принимаемые угломером 2 ПП1 и угломером 5 ПП2.
Вначале определяют экстраполированные значения координат xириэ, yириэ и экстраполированные значения азимутов α1э, α2э ИРИ, для чего выполняют следующее.
Угломер 2 ПП1 по принятым радиосигналам измеряет значение азимута α1 ИРИ и передает его в аппаратуру приема-передачи данных 3 ПП1.
Навигационная система 1 ПП1 определяет местоположение первой приемной позиции в земной прямоугольной системе координат в виде значений x1, y1 и передает их в аппаратуру приема-передачи данных 3 ПП1.
С помощью аппаратуры приема-передачи данных 3 ПП1 измеренные значения азимута α1 ИРИ и координат x1, y1 ПП1 передают в аппаратуру приема-передачи данных 6 ПП2, которая их принимает и передает далее в вычислительную систему 8 ПП2.
Угломер 5 ПП2 по принятым радиосигналам измеряет значения азимута α2 ИРИ и передает его в вычислительную систему 8 ПП2.
Навигационная система 7 ПП2 определяет местоположение второй приемной позиции в земной прямоугольной системе координат в виде значений x2, у2 и передает их в вычислительную систему 8 ПП2.
Вычислительная система 8 ПП2 по формулам (1) и (2) вычисляет значения координат xири, yири ИРИ и запоминает их как экстраполированные значения координат xириэ, yириэ ИРИ.
Кроме этого, вычислительная система 8 ПП2 по формулам (3) и (4) рассчитывает экстраполированные значения азимутов ось α1э, α2э, которые запоминает.
Затем, на каждом k-м шаге вычислений, отстоящем друг от друга на временной интервал τ, выполняют следующее.
Угломер 2 ПП1 по принятым радиосигналам измеряет значение азимута α1 ИРИ и передает его в аппаратуру приема-передачи данных 3 ПП1.
Навигационная система 1 ПП1 определяет местоположение первой приемной позиции в земной прямоугольной системе координат в виде значений x1, y1 и передает их в аппаратуру приема-передачи данных 3 ПП1.
С помощью аппаратуры приема-передачи данных 3 ПП1 измеренные значения азимута α1 ИРИ и координат x1, y1 ПП1 передают в аппаратуру приема-передачи данных 6 ПП2, которая их принимает и передает далее в вычислительную систему 8 ПП2.
Угломер 5 ПП2 по принятым радиосигналам измеряет значения азимута α2 ИРИ и передает его в вычислительную систему 8 ПП2.
Навигационная система 7 ПП2 определяет местоположение второй приемной позиции в земной прямоугольной системе координат в виде значений х2, y2 и передает их в вычислительную систему 8 ПП2.
Вычислительная система 8 ПП2 по формулам (5) вычисляет значения коэффициентов чувствительности Kx1, Kx2, Ky1, Ky2 и по формулам (6)-(11) такие параметры траектории ИРИ, как:  - оцененные значения координат ИРИ, xириэ, yириэ - экстраполированные значения координат ИРИ;
- оцененные значения координат ИРИ, xириэ, yириэ - экстраполированные значения координат ИРИ;  - оцененные значения проекций скорости ИРИ на оси прямоугольной системы координат.
- оцененные значения проекций скорости ИРИ на оси прямоугольной системы координат.
Кроме этого, вычислительная система 8 ПП2 по формулам (3) и (4) вычисляет экстраполированные значения азимутов α1э, α2э ИРИ.
Экстраполированные значения координат xириэ, yириэ ИРИ и экстраполированные значения азимутов α1э, α2э ИРИ вычислительная система 8 ПП2 запоминает для использования на следующем шаге измерений.
К принципам построения и алгоритмам функционирования навигационных систем, угломеров, аппаратуры передачи данных и вычислительной системы заявленный способ не предъявляет никаких особых требований: в качестве указанных устройств могут быть использованы любые из существующих в настоящее время. Все это подтверждает практическую применимость заявленного способа.
Заявленный способ оценивания параметров траектории ИРИ в УДПРЛС требует для реализации существенно меньших вычислительных затрат по сравнению с прототипом.
Кроме того, использование в заявленном способе коэффициентов чувствительности Kx1, Kx2, Ky1, Кy2, обеспечивающих пересчет измеряемых параметров из полярной системы координат в прямоугольную систему координат непосредственно в процессе фильтрации, повышает точность оценивания параметров траектории ИРИ.
Приложение
Ряд пояснений к используемым в заявленном способе формулам
1. При получении используемых в заявленном способе оценивания параметров траектории источников радиоизлучения (ИРИ) полагалось, что траектория движения ИРИ представляет линейную функцию времени, а измеренными координатами ИРИ являются азимуты α1 и α2, определяемые в двух точках пространства, в которых располагаются первая (ПП1) и вторая (ПП2) приемные позиции соответственно (см. фиг.2).
ИРИ формирует радиосигналы, принимаемые в ПП1 и ПП2. Источник радиоизлучения - любая радиоэлектронная система.
Навигационные системы ПП1 и ПП2 определяют местоположение приемных позиций x1, y1 и x2, y2 в прямоугольной системе координат. Предпочтительно в качестве навигационных систем использовать спутниковые радионавигационные системы как наиболее точные.
Известно [Дрогалин В.В., Ефимов В.А., Канащенков А.И. и др. Алгоритмы оценивания координат и параметров движения радиоизлучающих ИРИ в угломерных двухпозиционных бортовых радиолокационных системах. - Информационно-измерительные и управляющие системы, 2003, №1, с.15], что координаты ИРИ xири, yири связаны с азимутами α1 и α2 ИРИ и координатами x1, y1 и x2, y2 приемных позиций соотношениями (1) и (2), где разности (x1sinα1-y1cosα1) и (x2sinα2-y2cosα2) характеризуют расстояния от начала прямоугольной системы координат до прямых, проходящих через ПП1 и ПП2 в направлениях, определяемых линиями ПП1-ИРИ и ПП2-ИРИ соответственно.
Из формул (1) и (2) следует, что эти координаты являются нелинейными функциями измеряемых углов. Ошибки измерителей приводят к погрешностям Δlх и Δly расчета значений координат xири, yири ИРИ. В силу случайного характера изменения ошибок Δlх и Δly их характеризуют математическими ожиданиями mΔх и mΔy и дисперсиями Dx и Dy или среднеквадратическими ошибками  методика расчета которых изложена в [Дрогалин В.В., Ефимов В.А., Канащенков А.И. и др. Способы оценивания точности определения местоположения источников радиоизлучения пассивной угломерной двухпозиционной бортовой радиолокационной системой. - Успехи современной радиоэлектроники, 2003, №5, с.35-37].
методика расчета которых изложена в [Дрогалин В.В., Ефимов В.А., Канащенков А.И. и др. Способы оценивания точности определения местоположения источников радиоизлучения пассивной угломерной двухпозиционной бортовой радиолокационной системой. - Успехи современной радиоэлектроники, 2003, №5, с.35-37].
Используемый в заявленном способе алгоритм оценивания параметров траектории источника радиоизлучения ИРИ основан на линеаризации функций (1) и (2), допустимой при сравнительно малых среднеквадратических ошибках оценивания азимутов α1, α2 ИРИ и пренебрежением ошибками измерения координат x1, y1 и х2, y2 приемных позиций, в силу их малости. Поясним методику линеаризации на примере нелинейной функции (1) для координаты xири, определяющей зависимость оцененного значения координаты  ИРИ от оцененных значений азимутов
ИРИ от оцененных значений азимутов  Сущность метода линеаризации состоит в представлении нелинейной функции
Сущность метода линеаризации состоит в представлении нелинейной функции

записанной в формуле (1П) в обобщенном виде, степенным рядом относительно истинных значений азимутов α1ист, α2ист с оставлением в них только линейных членов, содержащих ошибки 
В результате линеаризации функция (1П) принимает следующий вид:

Здесь коэффициенты чувствительности


вычисляются при 
Применительно к функции (1П) коэффициенты чувствительности Kx1 и Кх2 определяются первыми двумя формулами соотношения (5).
Аналогичная методика линеаризации использовалась и для координаты y.
В приведенных формулах в явном виде не указана зависимость используемых переменных от времени. В заявленном способе предполагается, что измерения выполняются через равные промежутки времени τ. Поэтому вычисления коэффициентов чувствительности производятся в дискретные моменты времени k с периодом т по результатам измерения азимутов ИРИ и координат приемных позиций.
При выведении формул для оценивания координат ИРИ в уравнении (2П) вместо неизвестных истинных значений углов пеленга использовались их измеренные значения. Это означает, что вместо ошибок  в качестве угловых невязок в фильтре необходимо использовать Δα1=α1-α1э, Δα2=α2-α2э, т.е. разности измеренных α1, α2 и экстраполированных α1э, α2э значений азимутов соответственно для первой и второй приемных позиций. Указанные разности (часто называемые в литературе невязками измерений), предварительно умноженные на коэффициенты чувствительности, используются в алгоритмах фильтрации координат ИРИ в прямоугольной системе координат. Умножение невязок измерений на коэффициенты чувствительности обеспечивает пересчет невязок измерений из полярной системы координат в прямоугольную систему координат.
в качестве угловых невязок в фильтре необходимо использовать Δα1=α1-α1э, Δα2=α2-α2э, т.е. разности измеренных α1, α2 и экстраполированных α1э, α2э значений азимутов соответственно для первой и второй приемных позиций. Указанные разности (часто называемые в литературе невязками измерений), предварительно умноженные на коэффициенты чувствительности, используются в алгоритмах фильтрации координат ИРИ в прямоугольной системе координат. Умножение невязок измерений на коэффициенты чувствительности обеспечивает пересчет невязок измерений из полярной системы координат в прямоугольную систему координат.
2. Как и в прототипе, в заявленном изобретении алгоритмы оценивания координат ИРИ и их производных по осям ОХ и OY образуют два независимых канала фильтрации, аналогичных по своей структуре. В качестве фильтруемых параметров используются координаты x(k), y(k) и их производные  Процедура оценивания (см. формулы (6)-(11)) осуществляется на каждом k-м шаге измерений, т.е. дискретно во времени с периодом τ. Для процедуры оценивания в заявленном способе используются фильтры, по структуре аналогичные распространенным α,β-фильтрам.
Процедура оценивания (см. формулы (6)-(11)) осуществляется на каждом k-м шаге измерений, т.е. дискретно во времени с периодом τ. Для процедуры оценивания в заявленном способе используются фильтры, по структуре аналогичные распространенным α,β-фильтрам.
Экстраполированные значения азимутов ИРИ, необходимые для получения невязок измерений, рассчитываются по формулам (3) и (4), полученным из соотношений, приведенных в [Одинцов В.А. Радионавигация летательных аппаратов. - М.: Машиностроение, 1968, стр.162].
Разностные уравнения (формулы (6)-(11)) отражают процедуру фильтрации вновь поступающих результатов измерения, содержащихся в измеренных значениях азимутов α1 и α2, при формировании оцененных значений координат ИРИ и их производных.
Из формулы (6) следует, что оцененное значение  координаты х на k-ом шаге образуется на основе экстраполированного значения xэ координаты х, при добавлении к ней взвешенной ошибки прогноза
координаты х на k-ом шаге образуется на основе экстраполированного значения xэ координаты х, при добавлении к ней взвешенной ошибки прогноза
ax1Kx1(k)[α1(k)-α1э(k)]+ax2Kx2[α2(k)-α2э(k)].
Из формулы (7) следует, что оцененное значение проекции скорости  ИРИ на ось Х прямоугольной системы координат образуется прибавлением к оцененному на предыдущем шаге значению проекции скорости
ИРИ на ось Х прямоугольной системы координат образуется прибавлением к оцененному на предыдущем шаге значению проекции скорости  ИРИ взвешенной ошибки прогноза
ИРИ взвешенной ошибки прогноза

Формирование экстраполируемого значения xириэ координаты xири осуществляется в соответствии с формулой (8). Для линейной траектории скорость будет неизменной, поэтому координата между тактами измерений изменяется на величину 
Наличие ошибок измерения заставляет выбирать коэффициенты усиления фильтров ax1 и aх2 в формуле (6) меньше единицы. При этом их значения должны быть тем меньше, чем выше уровень шумов измерения. Уменьшение коэффициентов усиления фильтров ax1 и aх2 эквивалентно сужению полосы пропускания фильтрующей системы, что приводит к ослаблению эффекта действия ошибок измерения. Однако с уменьшением ax1 и aх2 возрастает динамическая ошибка. Аналогичные суждения справедливы и в отношении коэффициентов усиления фильтров bx1, bx2 (см. формулу (7)), определяющих вес, с которым ошибка измерения скорости вводится во вновь получаемое оцененное значение скорости 
Аналогичным образом формируются оцененные значения параметров траектории и для координаты у.
3. Для ввода начальных условий в алгоритмы оценивания (6)-(11) выполняется расчет координат ИРИ по формулам (1) и (2) на основе первичных измерений азимутов ИРИ и прямоугольных координат приемных позиций, полученных в начальный момент времени. Начальное значение скорости ИРИ полагается равным нулю, так как ИРИ при радиолокационном наблюдении может как приближаться, так и удаляться от приемных позиций.
Из рассмотрения процедуры оценивания параметров траектории ИРИ, реализуемой фильтрами по алгоритмам (6)-(11), следует, что качество оценивания координат ИРИ и их производных в существенной степени зависит от выбора коэффициентов усиления фильтров ax1, ax2, bx1, bx2 и ay1, ay2, by1, by2, определяющих вес корректирующих поправок. При выборе значений этих коэффициентов должны быть обеспечены приемлемые значения динамических характеристик фильтра: устойчивости, переходного процесса, динамических и флуктуационных ошибок в установившемся режиме. Методика выбора этих коэффициентов является стандартной и изложена в научно-технической литературе, например в [Кузьмин С.З. Цифровая радиолокация. Введение в теорию. - Киев: КВИЦ, 2000, стр.224-225]. В случае необходимости устранения зависимости ошибок измерения от положения ИРИ по отношению к приемным позициям при выборе коэффициентов усиления необходимо воспользоваться методикой, изложенной в [Дрогалин В.В., Ефимов В.А., Самарин О.Ф. и др. Оценивание параметров линейной траектории движения ИРИ в угломерных двухпозиционных системах на основе алгоритмов α,β-фильтрации. - Информационно-измерительные и управляющие системы, 2003, №2-3, с.9-12].
По своей структуре алгоритмы фильтрации, используемые в заявленном способе, совпадают с алгоритмами дискретного α,β-фильтра. Отличие состоит лишь в появлении дополнительных весовых коэффициентов, обеспечивающих пересчет невязок из полярной системы координат в прямоугольную систему координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНИВАНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ В ДВУХПОЗИЦИОННОЙ УГЛОМЕРНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2003 |
|
RU2246121C9 |
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ В УГЛОМЕРНЫХ ДВУХПОЗИЦИОННЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2004 |
|
RU2253126C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ ПО КУРСУ В УГЛОМЕРНОЙ ДВУХПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2006 |
|
RU2308093C1 |
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2742581C1 |
| АДАПТИВНЫЙ СПОСОБ ПАССИВНОЙ РАДИОЛОКАЦИИ | 2015 |
|
RU2593149C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ИСТОЧНИК РАДИОИЗЛУЧЕНИЯ В ДВУХПОЗИЦИОННОЙ ПАССИВНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2004 |
|
RU2262649C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И СКОРОСТИ СБЛИЖЕНИЯ С НИМИ В ОДНОПОЗИЦИОННЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2002 |
|
RU2232402C2 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ ПО КУРСУ В УГЛОМЕРНОЙ ДВУХПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2004 |
|
RU2256870C1 |
| СПОСОБ ОДНОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2759116C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ЦЕЛИ В ДВУХПОЗИЦИОННОМ КОМПЛЕКСЕ ПАССИВНОЙ ЛОКАЦИИ С ИСПОЛЬЗОВАНИЕМ ЗОНДИРУЮЩИХ СИГНАЛОВ ИОНОСФЕРНОЙ ЗАГОРИЗОНТНОЙ РЛС | 2020 |
|
RU2737279C1 |

Способ оценивания параметров траектории источников радиоизлучения (ИРИ) в угломерной двухпозиционной пассивной радиолокационной системе относится к радиолокационным системам обнаружения и используется для оценивания параметров траектории подвижного ИРИ. Достигаемый технический результат - возможность оценивания параметров движения ИРИ с заданным уровнем ошибок оценивания и независимостью этих ошибок от положения ИРИ по отношению к приемным позициям (ПП). При формировании обобщенных замеров измеряют угловые координаты ИРИ и координаты ПП, рассчитывают координаты ИРИ в прямоугольной системе координат. Для оценивания координат и проекций вектора скорости ИРИ на оси этой системы координат используют адаптивные алгоритмы α,β-фильтрации результатов обобщенных замеров. Адаптация заключается в выборе значений коэффициентов усиления в алгоритмах фильтрации, зависимых от значений текущих ошибок обобщенных замеров, обусловленных взаимным перемещением ПП и ИРИ. Достоинством способа является также простота реализации фильтров, так как перестройка их достигается изменением лишь двух коэффициентов усиления. 2 ил.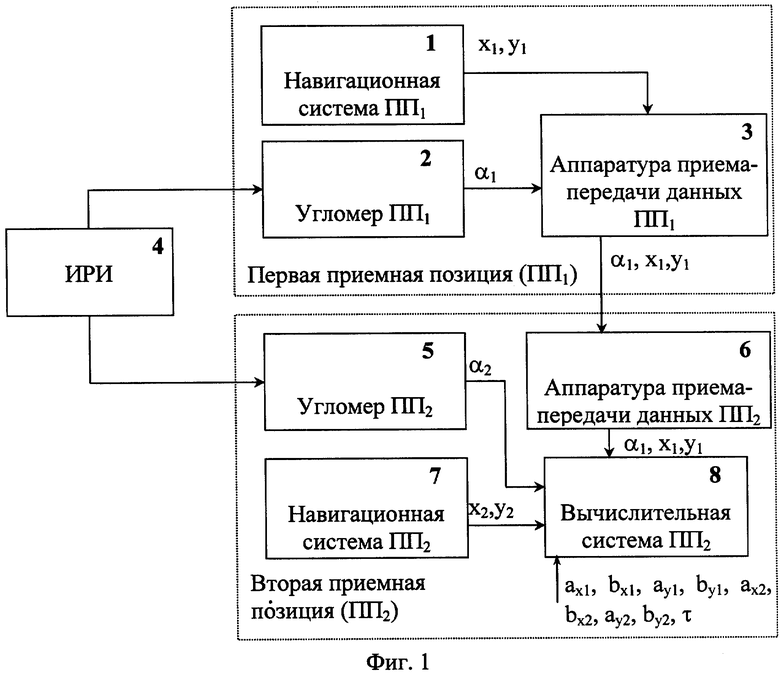
Способ оценивания параметров траектории источников радиоизлучений (ИРИ) в угломерной двухпозиционной пассивной радиолокационной системе, состоящий в том, что в первой приемной позиции (ПП1) измеряют значение азимута α1 ИРИ, а также значения собственных координат x1, y1 ПП1 в земной прямоугольной системе координат, которые передают во вторую приемную позицию (ПП2), во второй приемной позиции измеряют значение азимута α2 ИРИ, а также значение собственных координат x2, y2 ПП2 в той же системе координат, отличающийся тем, что во второй приемной позиции
вычисляют значения координат xири, yири ИРИ по формулам


по формулам xириэ=xири и yириэ=yири, полученным при условии, что скорость ИРИ и скорости ПП1 и ПП2 равны нулю, находят xириэ, yириэ - экстраполированные значения координат ИРИ,
экстраполированные значения координат xириэ, yириэ ИРИ запоминают, по формулам

рассчитывают экстраполированные значения азимутов α1э α2э ИРИ, которые запоминают,
затем, на каждом последующем k-м шаге вычислений, отстоящем друг от друга на временной интервал τ, выполняют следующее:
в первой ПП измеряют значение азимута α1 ПРИ и значения собственных координат x1, y1 и передают их во вторую ПП,
во второй ПП измеряют значения собственных координат x2, y2 и значение азимута α2 ИРИ, по значениям азимутов α1, α2 ИРИ, измеренных, соответственно, в первой и второй ПП, и координат x1, y1, x2, y2 первой и второй ПП, соответственно, по формулам:
Кx1={sin(α1-α2)[(x1cosα1+y1sinα1)cosα2+(x2sinα2-y2cosα2)sinα1]-cos(α1-α2)[(x1sinα1-y1cosα1)cosα2+(x2sinα2-y2cosα2)cosα1]}:sin2(α1-α2),
Kx2={-sin(α1-α2)[(x1sinα1-y1cosα1)sinα2+(x2cosα2+y2sinα2)cosα1]-cos(α1-α2)[(x1sinα1-y1cosα1)cosα2+(х2sinα2-y2cosα2)cosα1]}:sin2(α1-α2),
Ky1={sin(α1-α2)[(x1cosα1+y1sinα1)sinα2-(x2sinα2-y2cosα2)cosα1]-cos(α1-α2)[(x1sinα1-y1cosα1)sinα2+(x2sinα2-y2cosα2)sinα1]}:sin2(α1-α2),
Ky2={sin(α1-α2)[(x1sinα1-y1cosα1)cosα2-{x2cosα2+y2sinα2)sinα1]-cos(α1-α2)[(x1sinα1-y1cosα1)sinα2+(x2sinα2-y2cosα2)sinα1]}:sin2(α1-α2),
вычисляют значения коэффициентов чувствительности Kx1, Kx2, Ky1 и Ку2, оценивают значения параметров траектории ИРИ по формулам






где  - оцененные значения координат ИРИ,
- оцененные значения координат ИРИ,
xириэ, Уириэ - экстраполированные значения координат ИРИ,
 - оцененные значения проекций скорости ИРИ на оси прямоугольной системы координат, которые на первом шаге вычислений определяют равными нулю,
- оцененные значения проекций скорости ИРИ на оси прямоугольной системы координат, которые на первом шаге вычислений определяют равными нулю,
aх1, bx1, ay1, by1 и ах2, bx2, ay2, by2 - постоянные коэффициенты усиления фильтров,
τ - временной интервал между измерениями,
k, k-1 - целые числа, обозначающие дискретные моменты времени измерений,
рассчитывают экстраполированные значения азимутов α1э α2э ИРИ по формулам (3) и (4),
экстраполированные значения координат xириэ, yириэ ИРИ и экстраполированные значения азимутов α1э, α2э ИРИ запоминают для использования на следующем шаге измерений.
| ДРОГАЛИН В.В., ЕФИМОВ В.А | |||
| и др | |||
| Алгоритмы оценивания координат и параметров движения радиоизлучающих целей в угломестных двухпозиционных бортовых радиолокационных системах | |||
| Информационно-измерительные и управляющие системы, №1, т.1, 2003 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Водоподъемное устройство | 1926 |
|
SU4128A1 |
| Способ приготовления строительного изолирующего материала | 1923 |
|
SU137A1 |
| Ручной ткацкий станок | 1922 |
|
SU339A1 |

