Изобретение относится к радиолокационным системам обнаружения источников радиоизлучений (ИРИ) и определения координат и параметров их движения, в частности к двухпозиционным угломерным радиолокационным системам, используемым для оценивания параметров траектории подвижного ИРИ.
В радиолокации весьма обширный и важный класс объектов составляют источники радиоизлучений. При этом наблюдение за такими объектами осуществляется на основе приема сигналов, излучаемых их радиоэлектронными средствами. Широкое применение на практике нашли пассивные многопозиционные радиолокационные системы (РЛС) определения местоположения ИРИ, базирующиеся на пеленгационных методах. Основу пассивных многопозиционных угломерных РЛС составляют двухпозиционные угломерные РЛС, которые могут применяться также и самостоятельно.
Одной из основных задач радиолокационного наблюдения в двухпозиционных угломерных радиолокационных системах (ДПУРЛС) является построение траекторий движения ИРИ. Достаточно часто ИРИ движутся равномерно и прямолинейно. Применительно к такому движению параметрами траектории являются координаты ИРИ в прямоугольной системе координат и их первые производные, т.е. проекции вектора скорости ИРИ на оси этой системы координат.
Существующие угломерные способы оценивания параметров траектории ИРИ [1-3] позволяют определять лишь его местоположение, характеризуемое либо его координатами в прямоугольной системе координат, либо расстоянием от него до одной из приемных позиций (ПП). Оценивание проекций вектора скорости этими способами не предусматривается.
Также известны способы оценивания параметров линейной траектории движения ИРИ [4, 5], разработанные применительно к однопозиционным РЛС, в которых осуществляют непосредственное измерение угловых координат ИРИ и расстояния до них. Координаты ИРИ в таких РЛС измеряют в сферической или полярной системе координат и затем фильтруют. В процессе фильтрации и формируют собственно оцененные значения параметров линейной траектории движения ИРИ.
Наиболее простым из указанных является способ оценивания параметров траектории ИРИ с использованием упрощенной фильтрации результатов обобщенных замеров угловых координат ИРИ, приведенный в литературе [4, стр.212] (Понятие обобщенный замер широко используется в научно-технической литературе по многопозиционным системам радиолокации, см., например, [8, 9]). Обобщенные замеры получают путем пересчета результатов измерения координат ИРИ из сферической системы координат в прямоугольную. Это действие трактуется как процедура формирования результатов измерения координат ИРИ в прямоугольной системе координат. После получения обобщенных замеров для оценивания координат ИРИ в прямоугольной системе координат и скорости их изменения используют простейшие алгоритмы линейной калмановской фильтрации или алгоритмы α, β-фильтрации.
Описанный способ является наиболее близким (прототип) заявленному изобретению. В прототипе для оценивания параметров линейной траектории движения ИРИ измеряют его угловые координаты в двух ПП и затем фильтруют их, используя простейшие алгоритмы линейной калмановской фильтрации.
Недостатком прототипа является низкая точность оценивания значений параметров траектории движения ИРИ, связанная с тем, что значения коэффициентов усиления в алгоритмах фильтрации не адаптированы к текущим ошибкам обобщенных замеров, зависящих от изменяющегося во времени взаимного местоположения ПП и ИРИ [2]. Кроме того, использование в прототипе простейших алгоритмов фильтрации, не учитывающих зависимость значений ошибок измерений координат ИРИ от местоположения ИРИ относительно ПП, делает невозможным поддержание стабильных статистических характеристик ошибок оценивания значений параметров траектории ИРИ и не позволяет тем самым осуществлять качественное оценивание значений этих параметров.
Таким образом, задачей изобретения является разработка высокоточного способа оценивания параметров траектории источника радиоизлучений в двухпозиционной угломерной радиолокационной системе, в которой точность оценивания не зависит от положения ИРИ относительно ПП.
Поставленная задача решается тем, что для формирования измеренных значений координат ИРИ используют как измеренные значения азимутов ИРИ в двух ПП, так и измеренные координаты этих позиций, а при оценивании значений координат ИРИ и скорости их движения используют фильтры с автоматической подстройкой коэффициентов усиления. Согласно предлагаемому способу выполняют следующее.
Измеряют значения азимутов α1, α2 ИРИ соответственно в первой и второй ПП и координаты х1, y1 и х2, y2 этих позиций в прямоугольной системе координат (Подстрочные цифры у символов здесь и далее обозначают номер ПП).
Осуществляют взаимный обмен результатами измерений азимутов α1, α2 ИРИ и координат х1, y1 и х2, y2 приемных позиций между упомянутыми приемными позициями.
Вычисляют значения координат ИРИ xири и уири в прямоугольной системе координат по формулам:


где α1, α2 - измеренные значения азимутов ИРИ в двух ПП; x1, y1, x2, y2 - измеренные значения координат первой и второй приемных позиций.
Оценивают значения координат ИРИ и скорости его движения по формулам:






где 


 - оцененные значения координат ИРИ соответственно в k-й и (k-1)-й моменты времени, а символ “∧” над переменной здесь и далее указывает на то, что значение переменной оценено;
- оцененные значения координат ИРИ соответственно в k-й и (k-1)-й моменты времени, а символ “∧” над переменной здесь и далее указывает на то, что значение переменной оценено; 
 - значения координат ИРИ, экстраполированные на k-й такт измерений;
- значения координат ИРИ, экстраполированные на k-й такт измерений; 


 - оцененные значения скорости изменения соответствующих координат ИРИ соответственно в k-й и (k-1)-й моменты времени; Т - период обновления результатов измерений; k - целые числа, обозначающие дискретные моменты времени; αх, βх, αу, βу - коэффициенты усиления невязок (xири-xириэ) и (yири-yириэ) соответственно, значения которых получают из уравнений
- оцененные значения скорости изменения соответствующих координат ИРИ соответственно в k-й и (k-1)-й моменты времени; Т - период обновления результатов измерений; k - целые числа, обозначающие дискретные моменты времени; αх, βх, αу, βу - коэффициенты усиления невязок (xири-xириэ) и (yири-yириэ) соответственно, значения которых получают из уравнений




в которых  и
и  - коэффициенты, зависящие от значений
- коэффициенты, зависящие от значений  ,
,  - дисперсий ошибок оценивания скорости изменения координат x и у в установившемся режиме работы и Dx(k), Dy(k) - дисперсий ошибок измерения координат ИРИ по осям ОХ и ОУ соответственно, вычисляемых по формулам
- дисперсий ошибок оценивания скорости изменения координат x и у в установившемся режиме работы и Dx(k), Dy(k) - дисперсий ошибок измерения координат ИРИ по осям ОХ и ОУ соответственно, вычисляемых по формулам



где: Dαi(k) - дисперсия ошибок измерения азимута в i-й ПП (i=1, 2);  - экстраполированное значение расстояния между i-й ПП и ИРИ; xиi(k) и yиi(k) - измеренные значения координат i-й ПП; rx,y(k) - коэффициент корреляции между ошибками измерения координат ИРИ по осям ОХ и OY.
- экстраполированное значение расстояния между i-й ПП и ИРИ; xиi(k) и yиi(k) - измеренные значения координат i-й ПП; rx,y(k) - коэффициент корреляции между ошибками измерения координат ИРИ по осям ОХ и OY.
Синтез алгоритма оценивания значений параметров траектории ИРИ (формулы (3)-(8)) и расчет коэффициентов усиления αx, βх, αу, βу (формулы (9)-(15)) приведены в Приложении.
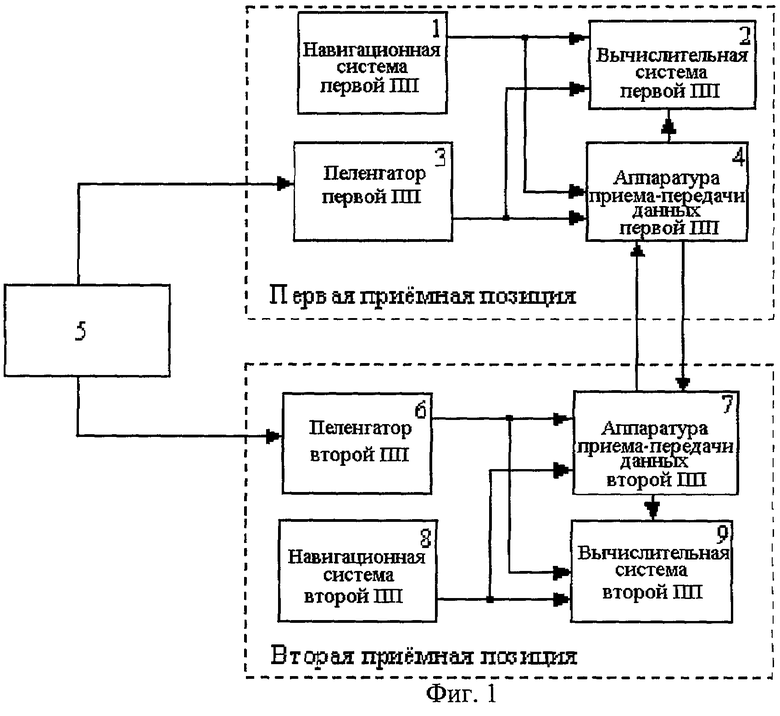
На фиг.1 представлена структурная схема двухпозиционной угломерной радиолокационной системы, в которой реализован предлагаемый способ оценивания параметров траектории ИРИ, где:
1 - навигационная система первой ПП;
2 - вычислительная система первой ПП;
3 - пеленгатор первой ПП;
4 - аппаратура приема-передачи данных первой ПП;
5 - источник радиоизлучений;
6 - пеленгатор второй ПП;
7 - аппаратура приема-передачи данных второй ПП;
8 - навигационная система второй ПП;
9 - вычислительная система второй ПП.
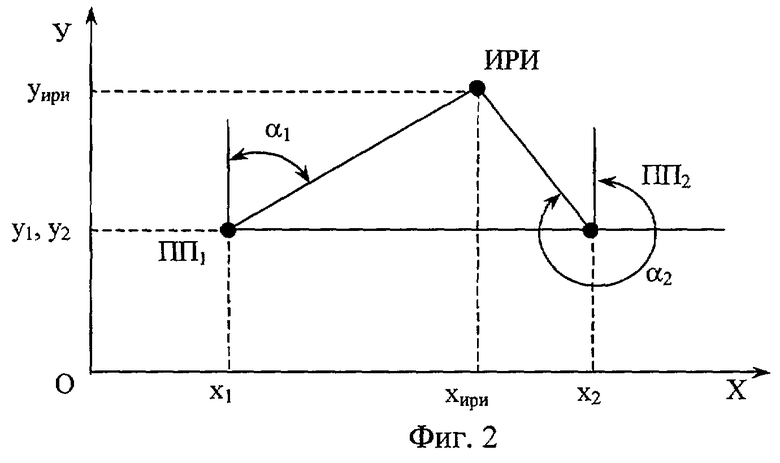
На фиг.2 показано взаимное расположение приемных позиций и ИРИ. На фигуре обозначено: ПП1, ПП2 и ИРИ - местоположение первой, второй приемных позиций и источника радиоизлучений соответственно в плоскости ОУХ; x1, y1, х2, y2, хири, yири - координаты ПП1, ПП2 и ИРИ соответственно в прямоугольной системе координат; α1, α2 - пеленги ИРИ из первой и второй ПП соответственно.
Фиг.3-6 иллюстрируют эффективность функционирования заявленного изобретения.
На фиг.3 приведены графики зависимости значений коэффициентов усиления невязок αx и βx от значений коэффициента  (см. пояснения к формулам (9)-(12)) для двух значений периода обновления результатов измерений Т, равных 0,3 с и 3 с.
(см. пояснения к формулам (9)-(12)) для двух значений периода обновления результатов измерений Т, равных 0,3 с и 3 с.
На фиг.4 приведены графики зависимости среднеквадратических ошибок (СКО) измерения σхи и оценивания σхо координаты х ИРИ от времени, выраженного номерами тактов k обновления информации. Кривая 1 на данной фигуре характеризует динамику СКО измерения σхи координаты х ИРИ, а кривая 2 - динамику СКО оценивания σхо этой же координаты.
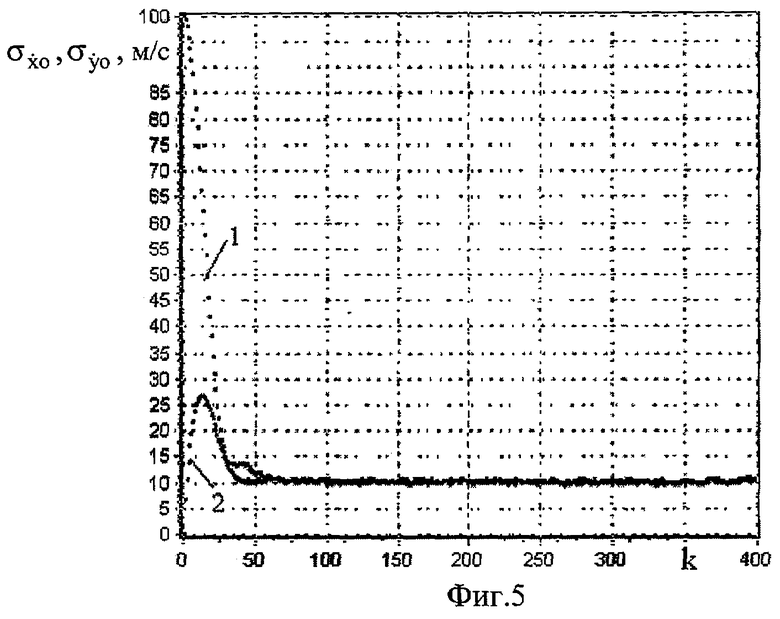
На фиг.5 показана динамика СКО оценивания скорости изменения координат ИРИ, где кривая 1 отображает динамику  - СКО оценивания скорости изменения координаты у, а кривая 2 - динамику
- СКО оценивания скорости изменения координаты у, а кривая 2 - динамику  - СКО оценивания скорости изменения координаты x.
- СКО оценивания скорости изменения координаты x.
На фиг.6 приведены графики зависимостей коэффициентов усиления αх и βх от времени, выраженного номерами тактов k обновления информации.
Рассмотрим функционирование ДПУРЛС при использовании в нем заявленного способа.
В состав ДПУРЛС входят две приемные позиции, которые могут быть стационарными либо подвижными. В последнем случае они размещаются на самолетах, кораблях и других движущихся объектах. Каждая ПП содержит одинаковый состав оборудования, включающий следующие устройства: пеленгатор 3 (6), навигационную систему 1 (8), аппаратуру приема-передачи данных 4 (7) и вычислительную систему 2 (9). Принципы построения этих устройств подробно описаны в научно-технической литературе, в частности в [2, 4, 6, 7], поэтому ниже при описании функционирования УПДРЛС данные устройства будут считаться известными.
Пеленгаторы первой 3 и второй 6 приемных позиций принимают радиосигналы, излучаемые ИРИ 5, и по ним измеряют соответственно значения азимутов α1 и α2 ИРИ (см. фиг.2). Навигационные системы первой 1 и второй 8 ПП0 определяют координаты х1, y1 первой приемной позиции (на фиг.2 - ПП1) и х2, y2 второй приемной позиции (на фиг.2 - ПП2) соответственно в прямоугольной системе координат ХОУ. Измеренные значения азимута α1 ИРИ и координат х1, y1 первой ПП с помощью аппаратуры приема-передачи данных первой 4 и второй 7 ПП передают в вычислительную систему второй ПП 9. Измеренные значения азимута α2 ИРИ и координат х2, y2 второй ПП с помощью аппаратуры приема-передачи данных второй 7 и первой 4 ПП передают в вычислительную систему первой ПП2.
В вычислительных системах первой 2 и второй 9 ПП по формулам (1) и (2) вычисляют значения координат ИРИ в прямоугольной системе координат и по формулам (3)-(8) оценивают значения координат ИРИ 
 и скоростей их изменения
и скоростей их изменения 
 а также вычисляют экстраполированные на следующий такт измерений значения координат ИРИ хириэ, yириэ. Причем в этих же вычислительных системах на каждом такте при формировании оцененных значений координат ИРИ
а также вычисляют экстраполированные на следующий такт измерений значения координат ИРИ хириэ, yириэ. Причем в этих же вычислительных системах на каждом такте при формировании оцененных значений координат ИРИ 
 и скоростей их изменения
и скоростей их изменения 
 по формулам (9)-(15) вычисляют значения коэффициентов усиления невязок αх, βх, αy, βy.
по формулам (9)-(15) вычисляют значения коэффициентов усиления невязок αх, βх, αy, βy.
Оцененные значения координат ИРИ 
 и скоростей их изменения
и скоростей их изменения 
 выдают потребителям.
выдают потребителям.
Эффективность предлагаемого способа оценивания параметров траектории движения ИРИ в угломерной двухпозиционной радиолокационной системе была оценена по результатам математического моделирования рассмотренного ДПУРЛС на ЭВМ. Результаты моделирования приведены на фиг.3-6.
На фиг.3 представлены зависимости значений коэффициентов усиления αх и βх от коэффициента  , характеризующего соотношение значений дисперсий ошибок оценивания скорости изменения координат x и у в установившемся режиме работы и текущих дисперсий ошибок измерения координат ИРИ по осям ОХ и ОУ. Значение коэффициента усиления αх при моделировании определялось в результате решения кубического уравнения (П.7) при двух значениях периодов обновления результатов измерения Т: 0,3 с и 3 с. Для удобства отображения на одном рисунке значений коэффициентов αх и βх масштаб для коэффициента усиления βх увеличен в 10 раз. Приведенные графики свидетельствуют о том, что в установившемся режиме работы для обеспечения заданного значения дисперсии случайных ошибок оценивания скорости ИРИ коэффициенты усиления фильтра с изменением ошибок измерения координаты должны изменяться.
, характеризующего соотношение значений дисперсий ошибок оценивания скорости изменения координат x и у в установившемся режиме работы и текущих дисперсий ошибок измерения координат ИРИ по осям ОХ и ОУ. Значение коэффициента усиления αх при моделировании определялось в результате решения кубического уравнения (П.7) при двух значениях периодов обновления результатов измерения Т: 0,3 с и 3 с. Для удобства отображения на одном рисунке значений коэффициентов αх и βх масштаб для коэффициента усиления βх увеличен в 10 раз. Приведенные графики свидетельствуют о том, что в установившемся режиме работы для обеспечения заданного значения дисперсии случайных ошибок оценивания скорости ИРИ коэффициенты усиления фильтра с изменением ошибок измерения координаты должны изменяться.
Результаты моделирования процесса оценивания значений координат ИРИ и скорости их движения представлены на фиг.4-6. Они получены при следующих условиях: ИРИ двигался с постоянной скоростью 100 м/с параллельно линии ПП1-ПП2, соединяющей приемные позиции, на расстоянии 50 км от нее. Требуемые значения СКО оценивания проекций вектора скорости ИРИ по обеим осям прямоугольной системы координат задавались равными 10 м/с. В формулах (5) и (8) в качестве оцененных значений координат ИРИ в начальный момент времени брались результаты первого измерения соответствующей координаты, а начальные значения скорости изменения этих координат в формулах (4) и (7) приравнивались нулю. Период обновления результатов измерений Т брался равным 3 с.
На фиг.4 по оси ординат отложены значения СКО измерения σхи и оценивания σхо координаты x ИРИ в метрах, а по оси абсцисс - номера тактов обновления информации k. Кривая 1, характеризующая динамику СКО измерения координаты ИРИ σхи, свидетельствует о зависимости ошибок измерения его координат от положения ИРИ по отношению к приемным позициям, которое изменяется во времени из-за взаимного перемещения ИРИ и приемных позиций. Кривая 2 отражает динамику СКО оценивания координаты ИРИ σхо. Разница в значениях ошибок, зафиксированная в один и тот же дискретный момент времени k по кривым 1 и 2, позволяет судить о степени фильтрации ошибок измерения данной координаты. Аналогичные графики получаются и при оценивании координаты у ИРИ.
На фиг.5 показана зависимость от времени СКО оценивания проекций вектора скорости ИРИ на оси прямоугольной системы координат. Кривая 1 характеризует динамику изменения СКО оценивания проекции вектора скорости ИРИ  на ось ОУ, а кривая 2 - СКО оценивания проекции вектора скорости ИРИ
на ось ОУ, а кривая 2 - СКО оценивания проекции вектора скорости ИРИ  на ось ОХ. Из графиков видно, что переходный процесс для СКО оценивания проекции вектора скорости ИРИ
на ось ОХ. Из графиков видно, что переходный процесс для СКО оценивания проекции вектора скорости ИРИ  на ось ОХ заканчивается примерно за 30 тактов, а для СКО оценивания проекции вектора скорости ИРИ
на ось ОХ заканчивается примерно за 30 тактов, а для СКО оценивания проекции вектора скорости ИРИ  на ось ОУ - за 50 тактов. В установившемся режиме СКО оценивания скорости изменения координат равны 10 м/с, что соответствует их заданным значениям.
на ось ОУ - за 50 тактов. В установившемся режиме СКО оценивания скорости изменения координат равны 10 м/с, что соответствует их заданным значениям.
На фиг.6 приведены графики зависимости значений коэффициентов усиления αх, βх невязок хири-хириэ от времени. Эти графики не подвергались статистическому усреднению и построены для одной из реализаций. Для удобства отсчетов масштаб для коэффициента усиления βх по оси ординат выбран в 10 раз большим, чем для коэффициента усиления αх. Поскольку за счет движения ИРИ его положение относительно приемных позиций меняется, то определенным образом изменяются и значения коэффициентов усиления. Минимальному значению ошибок измерения координаты ИРИ соответствуют максимальные значение коэффициентов усиления фильтра, что полностью соответствует физическому смыслу решаемой задачи оценивания. Аналогичные графики получаются и для коэффициентов усиления αy, βy невязок yири-yириэ.
Таким образом, результаты моделирования подтверждают работоспособность предлагаемого способа оценивания параметров траектории движения ИРИ в двухпозиционной угломерной радиолокационной системе.
Использование изобретения в двухпозиционных угломерных радиолокационных системах позволит обеспечить оценивание координат ИРИ и скорости их изменения с высокой точностью, которая не зависит от местоположения источника излучения относительно приемных позиций.
Кроме того, применение в изобретении алгоритмов фильтрации (3)-(8) делает процедуру оценивания координат ИРИ и скорости их изменения достаточно простой в вычислительном отношении, поскольку в данных алгоритмах перестройка фильтров в процессе адаптации к ошибкам измерений координат ИРИ достигается изменением лишь двух коэффициентов усиления в каждом канале фильтрации. При этом обеспечивается заданный уровень ошибок оценивания скорости изменения координат ИРИ при одновременной минимизации динамических ошибок в переходном режиме.
Использование заявленного способа не налагает дополнительных ограничений на элементную базу и не предъявляет существенных требований к быстродействию и объему памяти вычислительных систем.
Использованная литература
1. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь, 1981.
2. Южаков В.В. Современные методы определения местоположения источников электромагнитного излучения. - Зарубежная радиоэлектроника, 1987, №8, с.67-79.
3. Угломерно-базовый способ измерения дальности. Патент 2184981, МПК 7 G 01 S 5/04, 11/04. Опубл. 10.07.2002.
4. Кузьмин С.З. Цифровая радиолокация. Введение в теорию. - Киев: КВИЦ, 2000.
5. Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. - М.: Радио и связь, 1993.
6. Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления. - М.: Радио и связь, 1996.
7. Информационные технологии в радиотехнических системах: Учебное пособие/ В.А.Васин, И.Б.Власов, Ю.М.Егоров и др.; Под ред. И.Б.Федорова. - М.: Изд-во МГТУ им. Н.Э.Баумана, 2003.
8. В.В.Дрогалин, В.А.Ефимов, А.И.Канащенков и др. Алгоритмы оценивания координат и параметров движения радиоизлучающих объектов в угломерных двухпозиционных бортовых радиолокационных системах. - Информационно-измерительные и управляющие системы, 2003, №1, с.4-23.
9. Черняк B.C. Многопозиционная радиолокация. - М.: Радио и связь, 1993.
Приложение
Синтез алгоритма оценивания значений параметров траектории ИРИ. Расчет коэффициентов усиления ошибок измерений
В заявленном изобретении для оценивания значений параметров линейной траектории источника радиоизлучения (ИРИ) реализованы фильтры, по своей структуре подобные α,β-фильтрам и фильтрам Калмана [2]. Формульная схема такого алгоритма фильтрации для одной координаты имеет вид:



где 
 - оцененное значение координаты ИРИ в k-й и (k-1)-й моменты времени; xэ(k) - экстраполированное на k-й шаг вычислений значение координаты ИРИ;
- оцененное значение координаты ИРИ в k-й и (k-1)-й моменты времени; xэ(k) - экстраполированное на k-й шаг вычислений значение координаты ИРИ; 
 - оцененное значение скорости изменения координаты ИРИ в k-й и (k-1)-й моменты времени; Т - период обновления результатов измерений; xи(k) - измеренное значение координаты ИРИ; αx(k), βx(k) - коэффициенты усиления; k - целое число, обозначающие дискретный момент времени.
- оцененное значение скорости изменения координаты ИРИ в k-й и (k-1)-й моменты времени; Т - период обновления результатов измерений; xи(k) - измеренное значение координаты ИРИ; αx(k), βx(k) - коэффициенты усиления; k - целое число, обозначающие дискретный момент времени.
Разностные уравнения (П.1)-(П.3) описывают процедуру фильтрации вновь поступающих результатов измерения, содержащихся в хи(k), при формировании оцененных значений координаты ИРИ и ее производной.
Из уравнения (П.1) следует, что оцененное значение координаты  на k-м такте образуется на основе экстраполируемого значения хэ(k) координаты x(k), вычисленной по данным измерений на (k-1)-м такте, при добавлении к ней ошибки прогноза хи(k)-хэ(k) с весом, определяемым коэффициентом усиления αx(k).
на k-м такте образуется на основе экстраполируемого значения хэ(k) координаты x(k), вычисленной по данным измерений на (k-1)-м такте, при добавлении к ней ошибки прогноза хи(k)-хэ(k) с весом, определяемым коэффициентом усиления αx(k).
Процесс формирования оцененного значения скорости  изменения координаты х ИРИ описывается уравнением (П.2): к оцененному на (k-1)-м такте значению скорости
изменения координаты х ИРИ описывается уравнением (П.2): к оцененному на (k-1)-м такте значению скорости  прибавляется ошибка прогноза (в литературе часто называемая невязкой) хи(k)-хэ(k) по координате с весовым коэффициентом
прибавляется ошибка прогноза (в литературе часто называемая невязкой) хи(k)-хэ(k) по координате с весовым коэффициентом  зависящим от периода обновления результатов измерений Т и коэффициента усиления βx(k).
зависящим от периода обновления результатов измерений Т и коэффициента усиления βx(k).
Процесс формирования экстраполируемого значения хэ(k) координаты x(k) ИРИ описывается уравнением (П.3). Для линейной траектории ИРИ скорость изменения  координаты x(k) сохраняет постоянное значение за время Т и поэтому координата x(k) между тактами измерений изменяется на величину
координаты x(k) сохраняет постоянное значение за время Т и поэтому координата x(k) между тактами измерений изменяется на величину 
Наличие ошибок измерения координаты xи(k) заставляет выбирать значение коэффициента усиления αx(k) меньше единицы, при этом оно должно быть тем меньше, чем выше уровень шумов измерения. Уменьшение значения коэффициента усиления αx(k) эквивалентно сужению полосы пропускания фильтрующей системы, что приводит к ослаблению эффекта действия ошибок измерения. Однако с уменьшением αx(k) возрастает динамическая ошибка. Аналогичные рассуждения справедливы и в отношении значения коэффициента усиления βх, определяющего вес, с которым невязка  вводится во вновь получаемую оценку скорости
вводится во вновь получаемую оценку скорости 
Из сказанного следует, что качество оценивания координаты ИРИ и ее производных в существенной степени зависит от значений коэффициентов усиления αх и βх. При выборе значений этих коэффициентов должны быть обеспечены приемлемые значения динамических характеристик фильтра, таких как устойчивость, качество переходных процессов, динамические и флуктуационные ошибки фильтрации в установившемся режиме. Для выбора значений коэффициентов усиления αх и βх была использована методика, основанная на минимизации квадратичной динамической ошибки оценивания скорости изменения координаты x в переходном процессе при ограничении на заданное значение дисперсии флуктуационной ошибки оценивания этой скорости в установившемся режиме. Целесообразность использования данного критерия объясняется следующим. На вход фильтра поступают сигналы, представляющие собой сумму детерминированной составляющей и шумов измерения. Сигнал на выходе фильтра имеет ошибку, среднее значение (смещение) которой обусловлено в основном детерминированной составляющей на входе, а дисперсия определяется качеством фильтрации или уровнем усиления шумовой составляющей. Поскольку рассматриваемый фильтр имеет астатизм второго порядка, то при равномерном и прямолинейном движении ИРИ в установившемся режиме динамические ошибки отсутствуют [2, 5]. В этом случае средние значения ошибок оценивания координат ИРИ и скоростей их изменения, зависящие от характера переходного процесса в фильтре, будут обусловлены неточным заданием начальных значений координаты и скорости ее изменения. Средние значения данных ошибок зависят от параметров фильтра. Последние должны быть выбраны таким образом, чтобы обеспечить минимум рассмотренных ошибок в переходном режиме и заданные значения этих ошибок в установившемся режиме.
Дисперсия ошибки фильтрации координаты x  и дисперсия ошибки фильтрации скорости ее изменения
и дисперсия ошибки фильтрации скорости ее изменения  в установившемся режиме связаны соотношением:
в установившемся режиме связаны соотношением:

где Dх(k) - дисперсия ошибки измерения координаты; Т - интервал поступления результатов измерения;

коэффициент, характеризующий степень фильтрации флуктуационных ошибок скорости изменения координаты x.
Переходная характеристика фильтра оценивается с помощью показателей, представляющих собой квадраты накопленных ошибок определения скорости  при подаче на вход фильтра скачкообразного входного воздействия. Решая задачу минимизации
при подаче на вход фильтра скачкообразного входного воздействия. Решая задачу минимизации  при ограничении значения коэффициента
при ограничении значения коэффициента  (П.5), получаем соотношение [3]
(П.5), получаем соотношение [3]

Пара αх,  является оптимальной для фильтра (П.1)-(П.3) при оценивании как координаты, так и скорости ее изменения [3], причем сводящая число параметров, подлежащих выбору, к одному. Оптимальное значение αх выбирается исходя из требований к качеству фильтрации шума и находится из соотношения (П.4) при подстановке в него значения βх, определяемого соотношением (П.6):
является оптимальной для фильтра (П.1)-(П.3) при оценивании как координаты, так и скорости ее изменения [3], причем сводящая число параметров, подлежащих выбору, к одному. Оптимальное значение αх выбирается исходя из требований к качеству фильтрации шума и находится из соотношения (П.4) при подстановке в него значения βх, определяемого соотношением (П.6):

где  вычисляется по формуле (П.5) по заданному значению дисперсии ошибки оценивания скорости изменения координаты x и известному значению дисперсии ошибки измерения этой координаты.
вычисляется по формуле (П.5) по заданному значению дисперсии ошибки оценивания скорости изменения координаты x и известному значению дисперсии ошибки измерения этой координаты.
Операции, связанные с решением уравнения (П.7), описаны в [6]. Для обеспечения хорошего сглаживания ошибок измерения координат ИРИ при выборе коэффициентов αх, βх и αy, βy, определяющих вес корректирующих поправок в фильтрах каналов ОХ и OY, необходимо учитывать геометрию взаимного расположения ИРИ и подвижных позиций. Объясняется это тем, что дисперсии ошибок Dх и Dy измерения координат x и y, как показано в [4], зависят от взаимного положения ИРИ и приемных позиций.
Действительно, дисперсии Dx и Dy находятся из соотношений [1]:


Здесь Dαi - известная корреляционная функция ошибок измерения азимута αi в i-й приемной позиции (i=1, 2), которые можно считать дискретным гауссовским белым шумом с нулевым математическим ожиданием;  - расстояние между i-й приемной позицией и ИРИ (хi и уi - координаты i-й приемной позиции); rx,y - коэффициент корреляции между ошибками измерения координат ИРИ по осям ОХ и OY.
- расстояние между i-й приемной позицией и ИРИ (хi и уi - координаты i-й приемной позиции); rx,y - коэффициент корреляции между ошибками измерения координат ИРИ по осям ОХ и OY.
Величины, обратные приведенным в выражениях (П.8) и (П.9), есть дисперсии ошибок оценивания координат ИРИ. Совместно с коэффициентом корреляции rх,у, вычисляемым по формуле (П.10), эти величины определяют дисперсии ошибок определения местоположения ИРИ.
При проведении расчетов по формулам (П.8)-(П.10) вместо истинных значений координат ИРИ нужно подставлять их оцененные значения, а в качестве координат приемных позиций - их измеренные значения. Поскольку вычисления оцененных значений параметров линейной траектории ведутся в дискретные моменты времени, то дисперсии Dx(k) и Dy(k) ошибок измерения координат х и у ИРИ находят из соотношений



где Dαi(k) - дисперсия ошибок измерения азимута в i-й приемной позиции;  - экстраполированное значение расстояния между i-й приемной позицией и ИРИ; xиi(k) и yиi(k) - измеренные значения координат i-й приемной позиции; rx,y(k) - коэффициент корреляции между ошибками измерения координат ИРИ по осям ОХ и OY.
- экстраполированное значение расстояния между i-й приемной позицией и ИРИ; xиi(k) и yиi(k) - измеренные значения координат i-й приемной позиции; rx,y(k) - коэффициент корреляции между ошибками измерения координат ИРИ по осям ОХ и OY.
Подстановка в формулы (П.11)-(П.13) экстраполированных значений Rэi(k), хэ(k), yэ(k) объясняется тем, что на текущем k-м такте вначале вычисляют значения коэффициентов усиления αx, βx, αy, βy, а затем оценивают значения параметров линейной траектории. Поэтому на этапе вычисления коэффициентов усиления имеются лишь экстраполированные с предыдущего (k-1)-го такта оцененные значения расстояний и измеренные на k-м такте координаты приемных позиций.
Так как в процессе перемещения ИРИ и приемных позиций дисперсии Dх(k) и Dy(k) изменяются во времени, измерения становятся неравноточными. В результате ошибки оценивания значений параметров линейной траектории при постоянных коэффициентах усиления αх, βx, αy, βy будут зависеть от взаимного расположения приемных позиций и ИРИ. Чтобы устранить эту зависимость, необходимо управлять данными коэффициентами усиления. Для адаптации параметров фильтра к неравноточности ошибок измерения коэффициент  вычисляется по формуле
вычисляется по формуле  в которую подставляются дисперсии Dx(k) и Dy(k), рассчитанные согласно (П.11)-(П.13).
в которую подставляются дисперсии Dx(k) и Dy(k), рассчитанные согласно (П.11)-(П.13).
Использованная в Приложении литература
1. Южаков В.В. Современные методы определения местоположения источников электромагнитного излучения. - Зарубежная радиоэлектроника, 1987, №8, с.67-79.
2. Кузьмин С.З. Цифровая радиолокация. Введение в теорию. - Киев: КВИЦ, 2000.
3. Фарина А, Студер Ф. Цифровая обработка радиолокационной информации. - М.: Радио и связь, 1993.
4. В.В.Дрогалин, В.А.Ефимов, А.И.Канащенков и др. Способы оценивания точности определения местоположения источников радиоизлучения пассивной угломерной двухпозиционной бортовой радиолокационной системой. - Успехи современной радиоэлектроники, 2003, №5, с.22-39.
5. Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления. - М.: Радио и связь, 1996.
6. Г.Корн и Т.Корн. Справочник по математике. М.: Изд-во “Наука”, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНИВАНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ В УГЛОМЕРНОЙ ДВУХПОЗИЦИОННОЙ ПАССИВНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2004 |
|
RU2263927C2 |
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ В УГЛОМЕРНЫХ ДВУХПОЗИЦИОННЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2004 |
|
RU2253126C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И СКОРОСТИ СБЛИЖЕНИЯ С НИМИ В ОДНОПОЗИЦИОННЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2002 |
|
RU2232402C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИЗМЕРЕНИЯМ ИХ НЕСУЩЕЙ ЧАСТОТЫ | 2021 |
|
RU2776078C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ ПО КУРСУ В УГЛОМЕРНОЙ ДВУХПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2004 |
|
RU2256870C1 |
| СПОСОБ ТРАССОВОГО СОПРОВОЖДЕНИЯ ВОЗДУШНЫХ МАНЕВРИРУЮЩИХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПО ПЕЛЕНГОВОЙ ИНФОРМАЦИИ ОТ ОДНОПОЗИЦИОННОЙ СИСТЕМЫ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ ВОЗДУШНОГО БАЗИРОВАНИЯ | 2017 |
|
RU2660498C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ ПО КУРСУ В УГЛОМЕРНОЙ ДВУХПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2006 |
|
RU2308093C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ С ПОМОЩЬЮ ОДНОПОЗИЦИОННОЙ ПАССИВНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2020 |
|
RU2754349C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ИСТОЧНИК РАДИОИЗЛУЧЕНИЯ В ДВУХПОЗИЦИОННОЙ ПАССИВНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2004 |
|
RU2262649C1 |
| ТРИАНГУЛЯЦИОННО-ГИПЕРБОЛИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ РАДИОИЗЛУЧАЮЩИХ ВОЗДУШНЫХ ОБЪЕКТОВ В ПРОСТРАНСТВЕ | 2012 |
|
RU2503969C1 |



Изобретение относится к радиолокационным системам обнаружения источников радиоизлучений (ИРИ) и определения координат и параметров их движения и заключается в том, что измеряют значения азимутов источника радиоизлучений (ИРИ) в двух приемных позициях и координаты этих позиций в прямоугольной системе координат. Между приемными позициями осуществляют взаимный обмен результатами измерений азимутов ИРИ и координат приемных позиций и вычисляют значения координат ИРИ в прямоугольной системе координат. Вычисленные значения координат используют как наблюдаемые параметры в адаптивном фильтре, в котором оценивают значения координат ИРИ и скорости его движения. Упомянутый фильтр адаптирован к значениям дисперсий ошибок оценивания скорости изменения координат в установившемся режиме работы и значениям дисперсий ошибок измерения этих координат. Использование изобретения в двухпозиционных угломерных радиолокационных системах позволит обеспечить оценивание координат ИРИ и скорости их изменения с высокой точностью, которая не зависит от местоположения источника излучения относительно приемных позиций, что и является достигаемым техническим результатом. 6 ил.
Способ оценивания параметров траектории источника радиоизлучений в двухпозиционной угломерной радиолокационной системе, заключающийся в том, что измеряют значения азимутов α1, α2 источника радиоизлучений (ИРИ) в двух приемных позициях (ПП) и координаты х1, у1 и х2, у2 этих позиций в прямоугольной системе координат, между приемными позициями осуществляют взаимный обмен результатами измерений азимутов ИРИ и координат ПП, вычисляют значения координат ИРИ хири и уири в прямоугольной системе координат по формулам


 где α1, α2 - измеренные значения азимутов ИРИ соответственно в первой и второй ПП, х1, у1, х2, у2 - измеренные значения координат первой и второй ПП соответственно,
где α1, α2 - измеренные значения азимутов ИРИ соответственно в первой и второй ПП, х1, у1, х2, у2 - измеренные значения координат первой и второй ПП соответственно,
оценивают значения координат ИРИ и скорости его движения по формулам






где  - оцененные значения координат ИРИ в k-й и (k-1)-й моменты времени, а символ "^" над переменной указывает на то, что значение переменной оценено; хириэ(k), уириэ(k) - значения координат ИРИ, экстраполированные на k-й такт измерений;
- оцененные значения координат ИРИ в k-й и (k-1)-й моменты времени, а символ "^" над переменной указывает на то, что значение переменной оценено; хириэ(k), уириэ(k) - значения координат ИРИ, экстраполированные на k-й такт измерений;

 - оцененные значения скоростей изменения координат ИРИ в k-й и (k-1)-й моменты времени; Т - период обновления результатов измерений; k - целые числа, обозначающие дискретные моменты времени; αх, βх, αу, βу - коэффициенты усиления невязок (хири-хириэ) и (уири-уириэ), значения которых получают из уравнений
- оцененные значения скоростей изменения координат ИРИ в k-й и (k-1)-й моменты времени; Т - период обновления результатов измерений; k - целые числа, обозначающие дискретные моменты времени; αх, βх, αу, βу - коэффициенты усиления невязок (хири-хириэ) и (уири-уириэ), значения которых получают из уравнений




где  и
и  - коэффициенты, зависящие от значений
- коэффициенты, зависящие от значений 
 - дисперсий ошибок оценивания скорости изменения координат x и у в установившемся режиме работы и
- дисперсий ошибок оценивания скорости изменения координат x и у в установившемся режиме работы и  ,
,  - дисперсии ошибок измерения соответственно координат x и у ИРИ, которые находят из соотношений
- дисперсии ошибок измерения соответственно координат x и у ИРИ, которые находят из соотношений


где  - дисперсия ошибок измерения азимута в i-й ПП (i=1, 2);
- дисперсия ошибок измерения азимута в i-й ПП (i=1, 2);  - экстраполированное значение расстояния между i-й ПП и ИРИ; хиi(k) и yиi(k) - измеренные значения координат i-й ПП; rx,y(k) - коэффициент корреляции между ошибками измерения координат ИРИ по осям ОХ и ОY.
- экстраполированное значение расстояния между i-й ПП и ИРИ; хиi(k) и yиi(k) - измеренные значения координат i-й ПП; rx,y(k) - коэффициент корреляции между ошибками измерения координат ИРИ по осям ОХ и ОY.
| ДРОГАЛИН В.В | |||
| и др | |||
| Способы оценивания точности определения местоположения источников радиоизлучения пассивной угломерной двухпозиционной бортовой радиолокационной системой | |||
| Успехи современной радиоэлектроники, 2003, №5, с.22-39 | |||
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 1999 |
|
RU2154281C1 |
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1992 |
|
RU2012902C1 |
| RU 2000107983 А, 27.08.2003 | |||
| US 6542810 В2, 01.04.2003 | |||
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "АКУЛА С ПОМИДОРАМИ" СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2341994C1 |
| US 6107958 А, 22.08.2000. | |||

