Изобретение относится к весоизмерительной технике и предназначено для взвешивания летательных аппаратов.
Известно устройство для взвешивания самолета, содержащее смонтированные в углублениях пола цеха две платформы весов и три гидравлических подъемника, при этом при расположении самолета на шасси его носовая нога опирается на первую платформу весов, при расположении самолета на гидравлических подъемниках гидравлический подъемник, установленный под опорный узел хвостовой части фюзеляжа, опирается на вторую платформу весов. Устройство описано в способе определения веса самолета (см. а.с. СССР №386265, кл. G 01 G 19/07, 1971, фиг.2).
Каждая платформа известного устройства посредством шариковых опор расположена на четырех силоизмерительных датчиках, установленных на основании, при этом платформа снабжена стабилизирующим устройством в продольном и поперечном направлениях (см. а.с. СССР №394671, кл. G 01 G 19/02, G 01 G 21/06, 1970).
Но так как опорные узлы силоизмерительных датчиков известного устройства для взвешивания самолета не контактируют с его опорными узлами, а взаимодействуют посредством промежуточных конструктивных элементов с передней ногой шасси и с опорным узлом самолета под хвостовой частью фюзеляжа, известное устройство выполнено конструктивно сложным. Это его недостаток.
Погрешность взвешивания известным устройством зависит от погрешностей силоизмерительных датчиков и измерительного блока. Указанная погрешность равна определенной величине. Однако погрешность взвешивания известным устройством увеличена весом двух платформ и гидравлического подъемника, расположенных на силоизмерительных датчиках. Это недостаток известного устройства. Погрешность взвешивания известным устройством увеличена и тем, что устройством взвешивают не полный вес самолета, а только весовые нагрузки на носовую ногу шасси и на гидравлический подъемник, установленный под хвостовой частью фюзеляжа. Замеряют три расстояния под самолетом. А затем полный вес самолета рассчитывают по формуле. Замеры расстояний и расчет увеличивают погрешность известного устройства. Это его недостаток.
Из-за расположения промежуточных конструктивных элементов между опорным узлом самолета под хвостовой частью фюзеляжа и опорными узлами силоизмерительных датчиков для определения весовой нагрузки на опорный узел под хвостовой частью фюзеляжа используется не один датчик, а четыре. Четыре датчика под одним опорным узлом самолета усложняют известное устройство. Это его недостаток.
Известно весовое устройство для определения взлетного веса и взлетной центровки самолета, в котором используется не более двух силоизмерительных датчиков.
Известное весовое устройство содержит весоизмерительное устройство и грузовую платформу, выполненную с возможностью воздействия по своей длине на весоизмерительное устройство одним концом, а другой ее конец смонтирован шарнирно (вертикально - поворотно) на неподвижной фундаментной опоре, при этом минимальная длина грузовой платформы превышает опорную базу взвешиваемого самолета (см. заявку RU №93047208/28, кл. G 01 G 19/00, G 01 G 19/07, G 01 M 1/12, 1993.10.11).
Но так как опорные узлы силоизмерительных датчиков известного весового устройства не контактируют с опорными узлами взвешиваемого самолета, а расположены под концом грузовой платформы, длина которой превышает опорную базу самолета, при этом самолет расположен на платформе, весовое устройство выполнено конструктивно сложным. Это его недостаток.
Погрешность взвешивания известным весовым устройством зависит от погрешностей силоизмерительных датчиков и измерительного блока. Указанная погрешность равна определенной величине. Однако погрешность устройства увеличена тем, что устройством взвешивают не полный вес самолета, а только его часть. Замеряют расстояния под самолетом и вес самолета рассчитывают по формуле. Замеры расстояний и расчет увеличивают погрешность взвешивания известным устройством. Это его недостаток.
Известно весовое устройство для определения веса и центровки пустого самолета, которое по общему количеству существенных признаков является наиболее близким заявляемым весам.
Известное весовое устройство содержит три платформы весов, например платформы автомобильных весов, с установленными на них гидравлическими подъемниками, на которых взвешиваемый самолет расположен над полом цеха, и измерительный блок (см. заявку RU №93047208/28, кл. G 01 G 19/00, G 01 G 19/07, G 01 M 1/12, 1993.10.11. Руководство по летной эксплуатации самолета ЯК-42. Раздел 8.4. "Инструкция по загрузке и центровке" АО "Саратовский авиационный завод"). Прототип.
Каждая платформа известного весового устройства посредством шариковых опор расположена на четырех силоизмерительных датчиках, установленных на основании, при этом платформа снабжена стабилизирующим устройством в продольном и поперечном направлениях (см. а.с. СССР №394671, кл. G 01 G 19/02, G 01 G 21/06, 1970).
Но так как опорные узлы силоизмерительных датчиков известного весового устройства для определения веса и центровки пустого самолета не контактируют с опорными узлами взвешиваемого самолета, а взаимодействуют с ними посредством промежуточных конструктивных элементов, известное весовое устройство выполнено сложным. Это его недостаток.
Из-за расположения промежуточных конструктивных элементов между тремя опорными узлами взвешиваемого самолета и опорными узлами силоизмерительных датчиков для взвешивания самолета используются не три датчика, а двенадцать. Двенадцать датчиков под тремя опорными узлами взвешиваемого самолета усложняют известное устройство. Это его недостаток.
Погрешность взвешивания известным весовым устройством зависит от погрешностей силоизмерительных датчиков и измерительного блока. Указанная погрешность равна определенной величине. Однако погрешность взвешивания известным весовым устройством увеличена весом платформ и гидравлических подъемников, расположенных на силоизмерительных датчиках. Это недостаток устройства.
Технической задачей заявляемого решения является создание весов упрощенной конструкции, уменьшающих погрешность взвешивания, путем установки трех силоизмерительных датчиков на штоках поршней трех гидравлических подъемников (по силоизмерительному датчику на подъемник) так, что три опорных узла трех силоизмерительных датчиков контактируют с тремя опорными узлами взвешиваемого самолета.
Указанная техническая задача решается за счет того, что в устройстве для взвешивания неподвижного самолета, содержащем силоизмерительные датчики, установленные на трех основаниях, и три гидравлических подъемника, с помощью которых силоизмерительные датчики взаимодействуют с тремя опорными узлами взвешиваемого самолета, расположенного на гидравлических подъемниках над полом цеха, каждое вышеуказанное основание выполнено в виде цилиндра, в котором с двух противоположных торцов соосно выполнены нижнее и верхнее отверстия с перемычкой между ними, и основания нижними отверстиями надеты на штоки поршней вышеуказанных трех гидравлических подъемников с упором торцов штоков в перемычки, а на перемычки оснований в их верхние отверстия установлены три вышеуказанных силоизмерительных датчика, при этом три опорных узла трех силоизмерительных датчиков контактируют с вышеуказанными тремя опорными узлами взвешиваемого самолета. Введенные отличительные признаки в заявляемое изобретение во взаимодействии с ограничительными признаками влияют на создание весов упрощенной конструкции, уменьшающих погрешность взвешивания, следующим образом.
1. На фиг.1 известных весов для взвешивания большегрузных объектов, например автомобилей (см. а.с. СССР №394671, кл. G 01 G 19/02, G 01 G 21/06, 1970), используемых в прототипе, видно, что основание под силоизмерительный датчик 4 выполнено в виде металлической плиты, закрепленной в фундаменте 5, и является известным конструктивным элементом.
В заявляемых весах форма выполнения основания и его расположение на штоке поршня гидравлического подъемника являются новыми признаками.
2. Введенные отличительные признаки (каждое вышеуказанное основание выполнено в виде цилиндра, в котором с двух противоположных торцов соосно выполнены нижнее и верхнее отверстия с перемычкой между ними, и основания нижними отверстиями надеты на штоки поршней вышеуказанных трех гидравлических подъемников с упором торцов штоков в перемычки, а на перемычки оснований в их верхние отверстия установлены три вышеуказанных силоизмерительных датчика) позволили три силоизмерительных датчика установить на штоках поршней трех гидравлических подъемников. Позволили упростить конструкцию заявляемых весов.
3. А введенные отличительные признаки (три опорных узла трех силоизмерительных датчиков контактируют с вышеуказанными тремя опорными узлами взвешиваемого самолета) позволили исключить из заявляемых весов промежуточные конструктивные элементы между указанными опорными узлами, имеющиеся в аналогах и прототипе, и уменьшить погрешность.
В заявляемых весах погрешность зависит только от погрешностей силоизмерительных датчиков и измерительного блока.
Заявитель не обнаружил устройства для взвешивания, которому были бы присущи признаки, идентичные всем признакам, содержащимся в предлагаемых заявителем весах. Заявитель считает, что заявляемые весы соответствуют критерию новизны. Заявитель не обнаружил решений, имеющих признаки, совпадающие с отличительными признаками заявляемого технического решения. Заявитель считает, что оно соответствует критерию изобретательского уровня.
Заявляемые весы внедрены на предприятии, они соответствуют критерию промышленной применимости.
На фиг.1 показаны весы для взвешивания неподвижно самолета. Измерительный блок и блок питания не показаны;
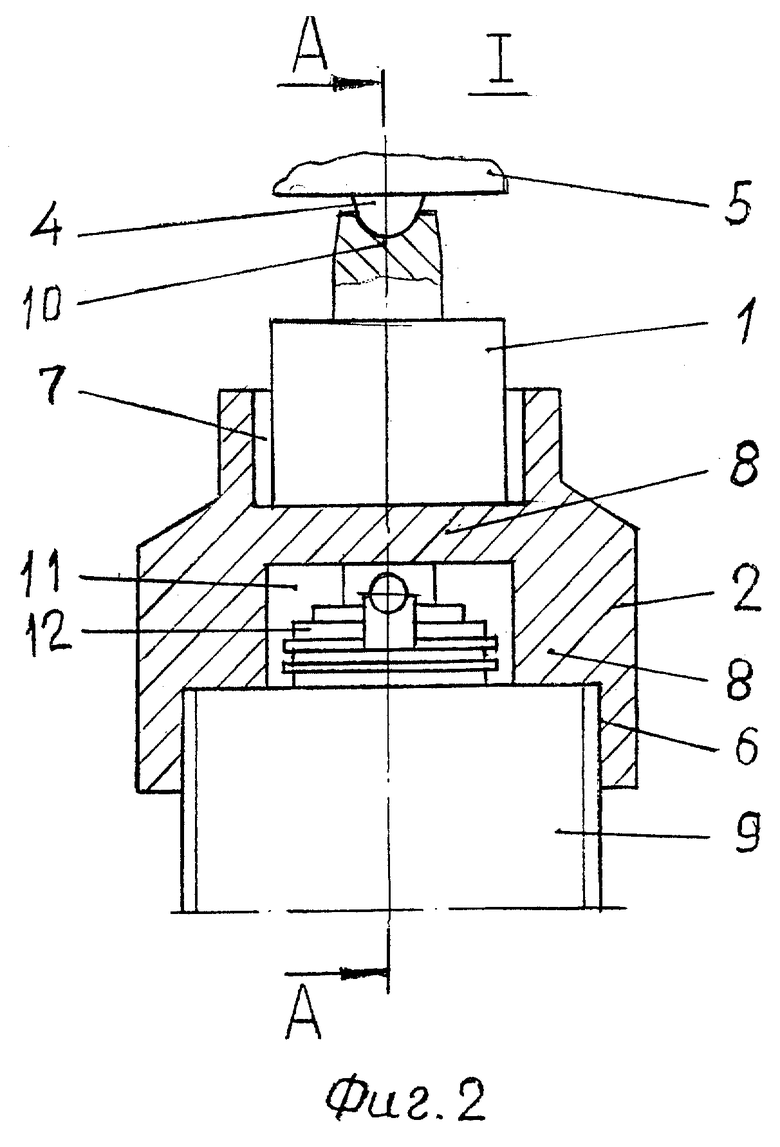
На фиг.2 - расположение основания и силоизмерительного датчика на штоке поршня гидравлического подъемника. Типовое для трех подъемников, разрез;
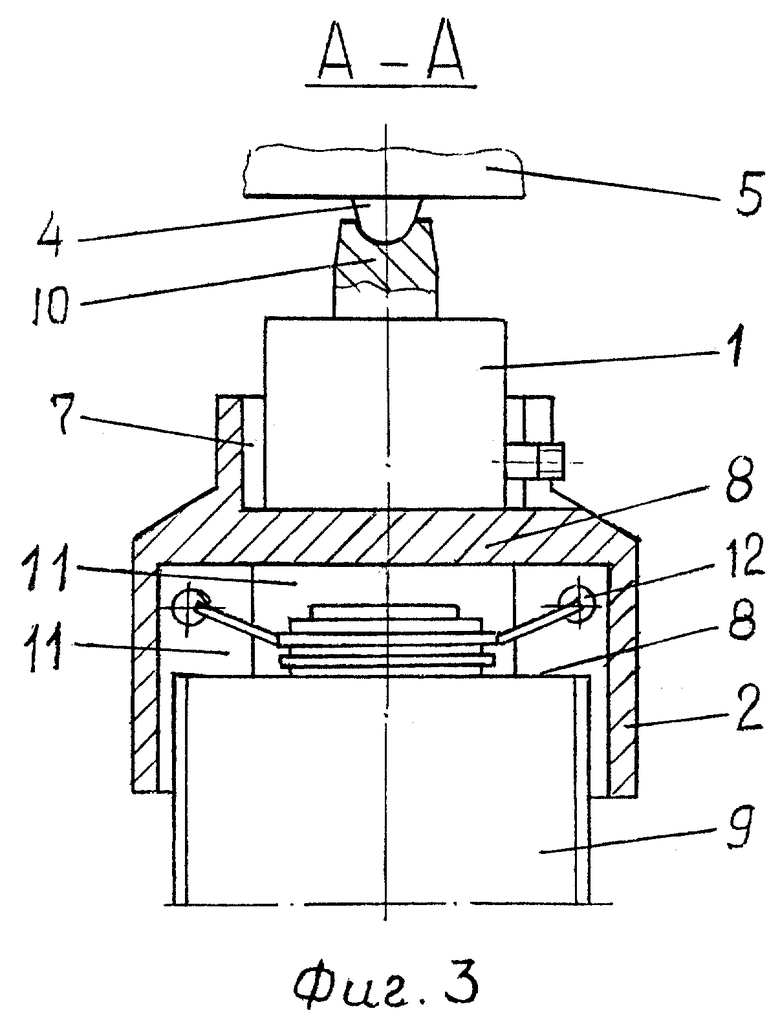
На фиг.3 - разрез А-А на фиг.2;
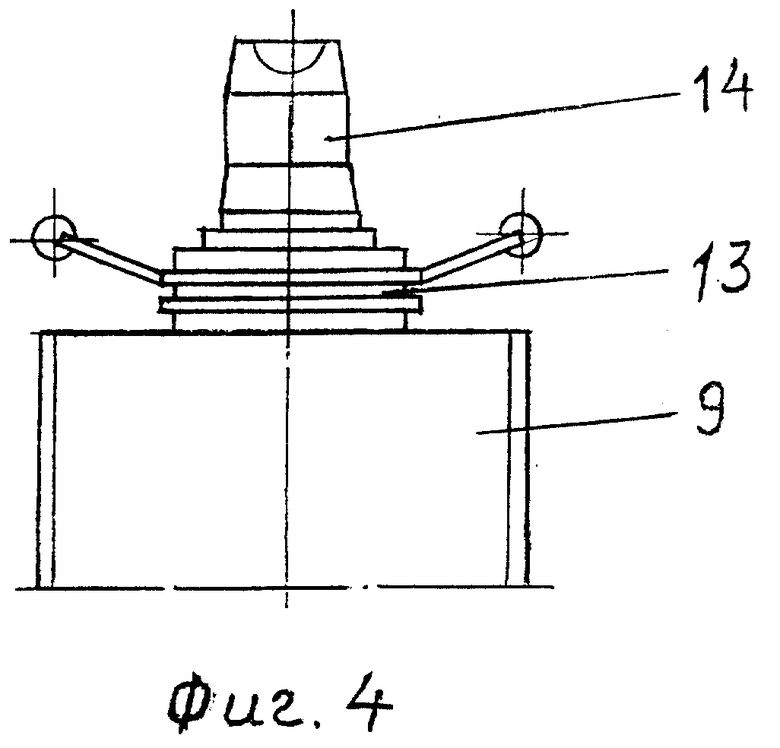
На фиг.4 - верх штока поршня гидравлического подъемника. Типовой для трех подъемников;
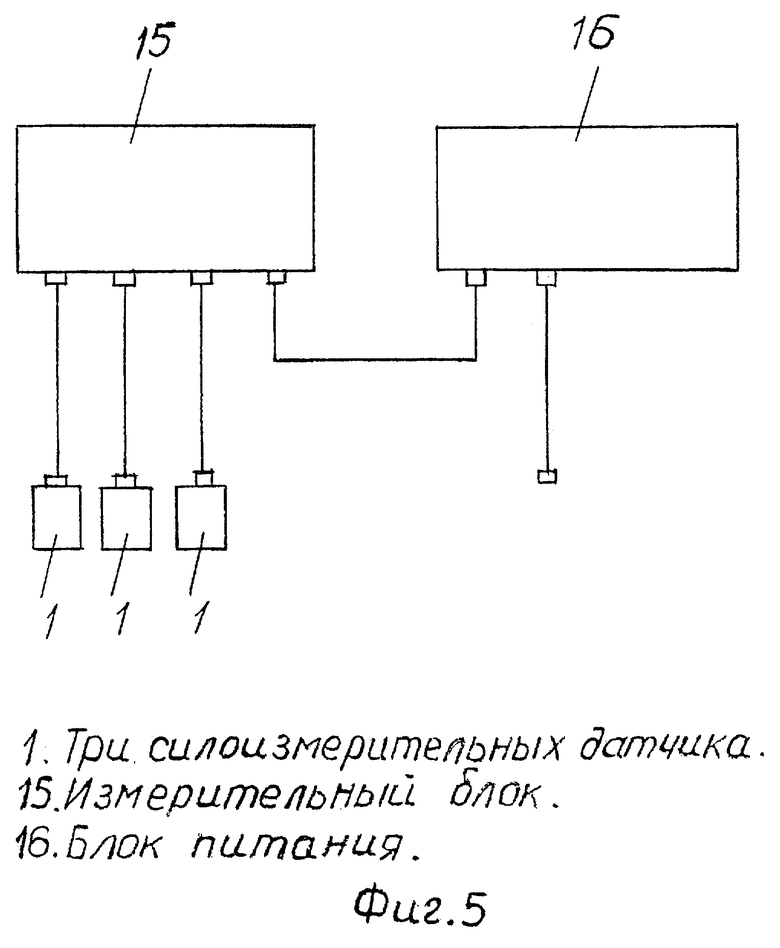
На фиг.5 - блок-схема измерительного устройства весов.
Весы содержат силоизмерительные датчики 1, установленные на трех основаниях 2, и три гидравлических подъемника 3, с помощью которых силоизмерительные датчики 1 взаимодействуют с тремя опорными узлами 4 взвешиваемого самолета 5, расположенного на гидравлических подъемниках 3 над полом цеха.
Каждое вышеуказанное основание 2 выполнено в виде цилиндра, в котором с двух противоположных торцов соосно выполнены нижнее 6 и верхнее 7 отверстия с перемычкой 8 между ними. И основания 2 нижними 6 отверстиями надеты на штоки 9 поршней вышеуказанных трех гидравлических подъемников 3 - с упором торцов штоков 9 в перемычки 8.
А на перемычки 8 оснований 2 в их верхние 7 отверстия установлены три вышеуказанных силоизмерительных датчика 1. При этом три опорных узла 10 трех силоизмерительных датчиков 1 контактируют с вышеуказанными тремя опорными узлами 4 взвешиваемого самолета 5.
Размеры диаметров верхних 7 отверстий в основаниях 2 выполнены больше размеров диаметров силоизмерительных датчиков 1. Снизу в перемычках 8 оснований 2 выполнены пазы 11, в которых расположены головки 12 установочных винтов 13 штоков 9. Позицией 14 обозначена насадка установочного винта 13. Позицией 15 - измерительный блок. Позицией 16 - блок питания.
Три гидравлических подъемника 3, используемых в весах, входят в комплект поставки наземного оборудования самолета 5 для подъема его над уровнем пола.
Основной деталью силоизмерительного датчика 1 является упругий элемент из стали, выполненный в виде полого двойного конуса. По образующим обоих конусов, по внутренней и наружной их сторонам, вдоль осей наклеены два моста из фольговых тензорезисторов. Один является рабочим мостом, а второй - запасным (не показано).
Заявляемые весы работают следующим образом.
Снимают насадки 14 с установочных винтов 13 штоков 9 трех гидравлических подъемников 3. Винты 14 ввинчивают в штоки 9. Три основания 2 нижними 6 отверстиями надевают на штоки 9 поршней трех гидравлических подъемников 3 с упором торцов штоков 9 в перемычки 8.
На перемычки 8 в верхние 7 отверстия трех оснований 2 устанавливают три силоизмерительных датчика 1 и совмещают их вертикальные оси с осями верхних 7 отверстий.
Гидравлические подъемники 3 с установленными основаниями 2 и силоизмерительными датчиками 1 подкатывают под три опорных узла 4 взвешиваемого самолета 5, расположенного на шасси на полу цеха.
С помощью ручных насосов гидравлических подъемников 3 поднимают штоки 9 с силоизмерительными датчиками 1 до опорных узлов 4 взвешиваемого самолета 5. Перемещают гидравлические подъемники 3 по полу цеха и визуально совмещают вертикальные оси опорных узлов 10 трех силоизмерительных датчиков 1 с осями трех опорных узлов 4 взвешиваемого самолета 5.
Каждый силоизмерительный датчик 1 вручную поднимают над перемычками 8 оснований 2 и его опорный узел 10 совмещают с опорным узлом 4 взвешиваемого самолета 5. Увеличенные размеры диаметров верхних 7 отверстий оснований 2 не препятствуют совмещению опорных узлов. С помощью ручных насосов гидравлических подъемников 3 поднимают штоки 9 до упора перемычек 8 оснований 2 в силоизмерительные датчики 1.
С помощью насосных установок, гидравлических подъемников 3 поднимают взвешиваемый самолет гидравлическими подъемниками 3 над полом цеха. Устанавливают его в линию полета и производят поперечную нивелировку.
С помощью жгутов подсоединяют силоизмерительные датчики 1 к измерительному блоку 15, а блок питания 16 - к источнику переменного тока.
Нажимают кнопки "Первый датчик" и "Пуск" измерительного блока 15. Пропорционально деформации упругого элемента первого силоизмерительного датчика 1 изменяется величина выходного сигнала его тензорезисторного моста. Сигнал поступает на измерительный блок 15. На его шкале индикации воспроизводится значение весовой составляющей взвешиваемого самолета 5 в цифровой форме десятичного кода, приходящаяся на первый силоизмерительный датчик 1. Весовую составляющую записывают.
Снимают величины весовых составляющих взвешиваемого самолета 5 со второго и третьего силоизмерительных датчиков 1. Весовые составляющие записывают. Суммируют три величины весовых составляющих и получают вес самолета 5.
Упрощение конструкции заявляемых весов достигнуто установкой трех силоизмерительных датчиков 1 на штоках 9 трех гидравлических подъемниках 3. Уменьшение погрешности заявляемых весов достигнуто контактированием трех опорных узлов 10 трех силоизмерительных датчиков 1 с тремя опорными узлами 4 взвешиваемого самолета. Контактированием опорных узлов исключены из заявляемых весов промежуточные элементы между опорными узлами, присущие аналогам и прототипу.
Этим уменьшена погрешность.
В заявляемых весах погрешность зависит только от погрешностей силоизмерительных датчиков 1 и измерительного блока 15.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННЫЕ ТЕНЗОВЕСЫ | 1993 |
|
RU2044283C1 |
| ВЕСОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2002 |
|
RU2222787C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕСА ТРАНСПОРТНЫХ СРЕДСТВ | 1997 |
|
RU2116630C1 |
| АВТОМОБИЛЕРАЗГРУЗОЧНЫЙ ВЕСОВОЙ КОМПЛЕКС | 2011 |
|
RU2453817C1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ | 1996 |
|
RU2108551C1 |
| СПОСОБ БАЛАНСИРОВКИ РАБОЧЕГО КОЛЕСА ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ | 2013 |
|
RU2530428C1 |
| ДАТЧИК ДЛЯ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 1996 |
|
RU2102710C1 |
| ПОРТАТИВНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕСА ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2345330C1 |
| ДАТЧИК УСИЛИЙ ДЛЯ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 1997 |
|
RU2114405C1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2079117C1 |
Изобретение относится к измерительной технике и может быть использовано для взвешивания летательных аппаратов. Весы содержат силоизмерительные датчики, установленные на трех основаниях, и три гидравлических подъемника для взаимодействия датчиков с тремя опорными узлами самолета. Каждое основание выполнено в виде цилиндра, с двух противоположных торцов которого соосно выполнены нижнее и верхнее отверстия с перемычкой между ними. Основания нижними отверстиями надеты на штоки поршней трех гидравлических подъемников с упором торцов штоков в перемычки. В верхние отверстия оснований на перемычки установлены три вышеуказанных силоизмерительных датчика. Три опорных узла трех силоизмерительных датчиков контактируют с вышеуказанными тремя опорными узлами взвешиваемого самолета. Технический результат заключается в упрощении конструкции весов, уменьшающей погрешность взвешивания. 5 ил.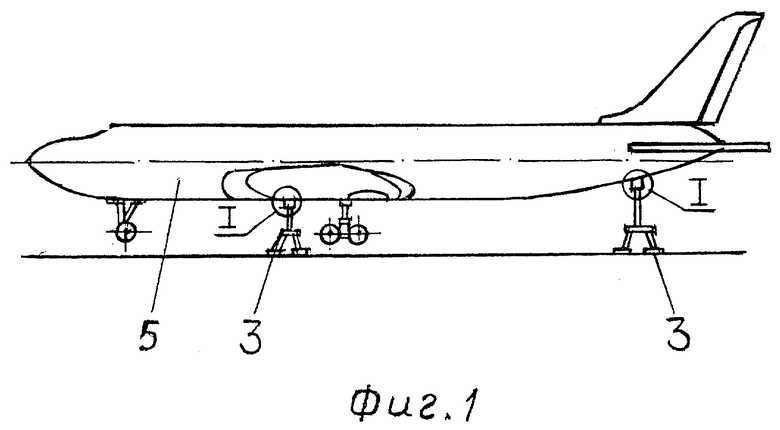
Весы для взвешивания неподвижного самолета, содержащие силоизмерительные датчики, установленные на трех основаниях, и три гидравлических подъемника, с помощью которых силоизмерительные датчики взаимодействуют с тремя опорными узлами взвешиваемого самолета, расположенного на гидравлических подъемниках над полом цеха, отличающиеся тем, что каждое вышеуказанное основание выполнено в виде цилиндра, в котором с двух противоположных торцов соосно выполнены нижнее и верхнее отверстия с перемычкой между ними, и основания нижними отверстиями надеты на штоки поршней вышеуказанных трех гидравлических подъемников с упором торцов штоков в перемычки, а на перемычке оснований в их верхние отверстия установлены три вышеуказанных силоизмерительных датчика, при этом три опорных узла трех силоизмерительных датчиков контактируют с тремя опорными узлами взвешиваемого самолета.
| RU 93047208 А 11.10.1993 | |||
| ВЕСЫ ДЛЯ ВЗВЕШИВАНИЯ БОЛЬШЕГРУЗНЫХ ОБЪЕКТОВ | 0 |
|
SU394671A1 |
| ПЕРЕНОСНОЕ ГРУЗОПРИЕМНОЕ УСТРОЙСТВО ЭЛЕКТРОННО- ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 0 |
|
SU248278A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА САМОЛЕТА | 0 |
|
SU386265A1 |

