Изобретение относится к подъемно-транспортной технике, а именно, к подъёмным устройствам, предназначенным для механизации производства, где требуется ручная установка и съём заготовок в станок, и может быть использовано на линиях сборки оборудования, в сервисных центрах, а также на складах.
Из существующего уровня техники известен кран-манипулятор электромеханический (патент RU 162779 U1, 27.06.2016, B66C17/00), характеризующийся тем, что содержит двухбалочный с приводом мост, на котором размещена с возможностью перемещения по рельсам грузовая с двумя дублирующими приводами тележка, несущая телескопическую раздвижную с помощью цепи грузоподъемную штангу, на последней секции которой смонтирована поворотная платформа с установленными на ней механической рукой с шестью степенями свободы, гнездом для подстыковки различного типа и назначения сменных захватов с приводом и управлением от поворотной платформы, блоками подвижных и неподвижных видеокамер, соответственно контролирующих работу, выполняемую с помощью механической руки (манипулятора), и обеспечение наведения крана на нужный объект и позволяющих ориентировать поворотную платформу на нужный угол при стыковке захватов, при этом рядом с рельсами на мосту расположена зубчатая рейка с зубчатым колесом и пружиной поджатия электромашинного датчика положения тележки на мосту, а также мишень лазерного дальномера, установленного с системой зеркал в проходке стены, а для компактной укладки цепи телескопическая штанга снабжена контейнером, на горловине которого установлен цепеукладчик с приводом от мотор-редуктора, размещенного на тензометрических датчиках силы, обеспечивающих выдачу сигнала на устройство контроля сил, возникающих в цепи при выполнении технологических операций, к тому же сам мотор-редуктор оснащен измерителем угла поворота, выдающим код вертикальной координаты Z поворотной платформы, причем имеющийся на тележке кабельный барабан с электрическим коллектором и мотор-редуктором, управляемым датчиком натяжения кабеля, шкив которого одновременно является поводком для укладки кабеля слоями и связан с приводом кабельного барабана, а пульт управления краном-манипулятором вынесен в отдельное операторское помещение, и на котором размещаются все средства индикации, отображения видеоинформации, в том числе и мнемосхемы управления механической рукой, а также остальные органы управления.
Из уровня техники также известно устройство для измерения угла наклона каната грузоподъёмной машины (патент RU 2346879 C2, 20.02.2009, B66C13/00), содержащее корпус, прикрепленный посредством подвижного или неподвижного соединения к грузоподъемной машине с возможностью взаимодействия с ее канатом и датчик углового положения, установленный внутри этого корпуса, причём, оно дополнительно содержит электронную схему обработки выходных сигналов датчиков, а также, по меньшей мере, один дополнительный датчик натяжения каната, и/или датчик нагрузки на грузозахватном органе, и/или датчик положения подвижной обоймы полиспаста, и/или датчик положения грузозахватного органа, причем выходы датчика углового положения и, по меньшей мере, одного из указанных дополнительных датчиков подключены к входам электронной схемы обработки выходных сигналов датчиков.
Наиболее близким техническим решением является подъёмник (патент US 2022363524 A1, 17.11.2022, B66C13/16, B66D3/26), который содержит: верхний крюк, включающий в себя основание крюка и вставное кольцо, через которое оно продето в ортогональном направлении подвешивания груза; опорный стержень, который включает в себя участок большого диаметра со стороны крюка, вставленный через вставное отверстие в центральном участке, концевые участки большого диаметра на обоих концах, промежуточный участок, проходящий от участка большого диаметра со стороны крюка к концевому участку большого диаметра, и участок деформации, который предусмотрен на промежуточном участке и имеет радиальное поперечное сечение с площадью сечения меньшей, чем у промежуточной части; основную раму, которая включает в себя пару опорных отверстий, подвешена и поддерживается верхним крюком через опорный стержень, при этом концевая часть большого диаметра с одной стороны вставлена в одно опорное отверстие, а концевая часть большого диаметра с другой стороны вставлена в другое опорное отверстие; а также средство измерения нагрузки, которое прикреплено к участку деформации при растяжении и измеряет сдвиговую нагрузку, действующую на участок деформации при растяжении, при этом, по меньшей мере, часть промежуточной части, выходящей от участка большого диаметра со стороны крюка, вставлена в опорное отверстие.
Основными недостатками вышеописанных технических решений являются недостаточно эффективная реализация быстродействия, точности позиционирования грузов и удобства в управлении при эксплуатации данных устройств.
Техническим результатом заявляемого изобретения является расширение эксплуатационных возможностей, заключающихся в повышении быстродействия, точности позиционирования грузов и удобства в управлении.
Указанный технический результат достигается за счет того, что подъемное устройство содержит несущую конструкцию, на которой установлены технические средства подъёмной системы.
Причём, технические средства подъёмной системы оборудованы механизмом намотки/смотки гибкого тягового органа, состоящим, по меньшей мере, из одного цилиндрического барабана, на внешней поверхности которого выполнена спиральная канавка для непосредственной намотки/смотки гибкого тягового органа, и который по оси симметрии своей цилиндрической части оборудован винтовой передачей.
В частности, цилиндрический барабан по оси симметрии своей цилиндрической части оборудован шарико-винтовой передачей, причем шаг спиральной канавки может быть равен шагу шарико-винтовой передачи.
При этом механизм намотки/смотки гибкого тягового органа может быть выполнен таким образом, что внутри цилиндрического барабана по оси симметрии его цилиндрической части неподвижно относительно цилиндрического барабана закреплена гайка шарико-винтовой передачи, выполненная с функцией вращательно-поступательного движения с цилиндрическим барабаном относительно винта шарико-винтовой передачи, который неподвижно закреплён через центральную цилиндрическую часть подшипников вращения приводных дисков, выполненных с возможностью передачи вращения к цилиндрическому барабану, по меньшей мере, через три цилиндрических направляющих, внешняя часть которых выполнена с образованием пар скольжения со сквозными отверстиями в цилиндрическом барабане соответственно, расположенными с равным угловым шагом концентрично его внешней диаметральной окружности.
Кроме этого, технические средства подъёмной системы могут дополнительно содержать, по меньшей мере, один синхронный серводвигатель с датчиком углового положения ротора и с приводом вращения приводных дисков цилиндрического барабана, по меньшей мере, через один прецизионный планетарный двухступенчатый редуктор, на входном первичном валу которого установлен электромагнитный дисковый тормоз.
Причём, технические средства подъёмной системы могут дополнительно содержать, по меньшей мере, один оптический датчик абсолютного положения груза.
При этом технические средства подъёмной системы могут дополнительно содержать, по меньшей мере, одно крюковое сцепное устройство, закреплённое на выходном конце холостой ветви гибкого тягового органа.
Кроме этого, технические средства подъёмной системы могут дополнительно содержать, по меньшей мере, один тензометрический датчик натяга гибкого тягового органа, расположенный на холостой ветви гибкого тягового органа.
Причём, на холостой ветви гибкого тягового органа между тензометрическим датчиком его натяга и крюковым сцепным устройством могут быть дополнительно установлены направляющие ролики, выполненные с возможностью снижения погрешности передачи данных упомянутого тензометрического датчика от угла отклонения гибкого тягового органа.
При этом крюковое сцепное устройство в нижней своей части может содержать крюковую подвеску, а в верхней – корпус, во внутренней нижней части которого расположен упорный подшипник, подпружиненный по внутренней верхней части упомянутого корпуса пружиной.
Кроме этого, технические средства подъёмной системы могут быть дополнительно выполнены, по меньшей мере, с одной системой управления устройством, содержащей векторный преобразователь частоты, который подключен к датчику углового положения ротора синхронного серводвигателя, контроллер движения, подключенный к оптическому датчику абсолютного положения груза, контроллер натяжения гибкого тягового органа, который подключен к тензометрическому датчику его натяга, а также модули системы автоматики, подключенные непосредственно к синхронному серводвигателю и электромагнитному дисковому тормозу.
Причём, гибкий тяговый орган может быть выполнен в виде стального троса.
При этом несущая конструкция может быть выполнена в виде металлоконструкции.
Кроме этого, шарико-винтовая передача может быть выполнена простого, или дуплексного, или трехнитевого, или четырехнитевого, прецизионного, или суперпрецизионного типа.
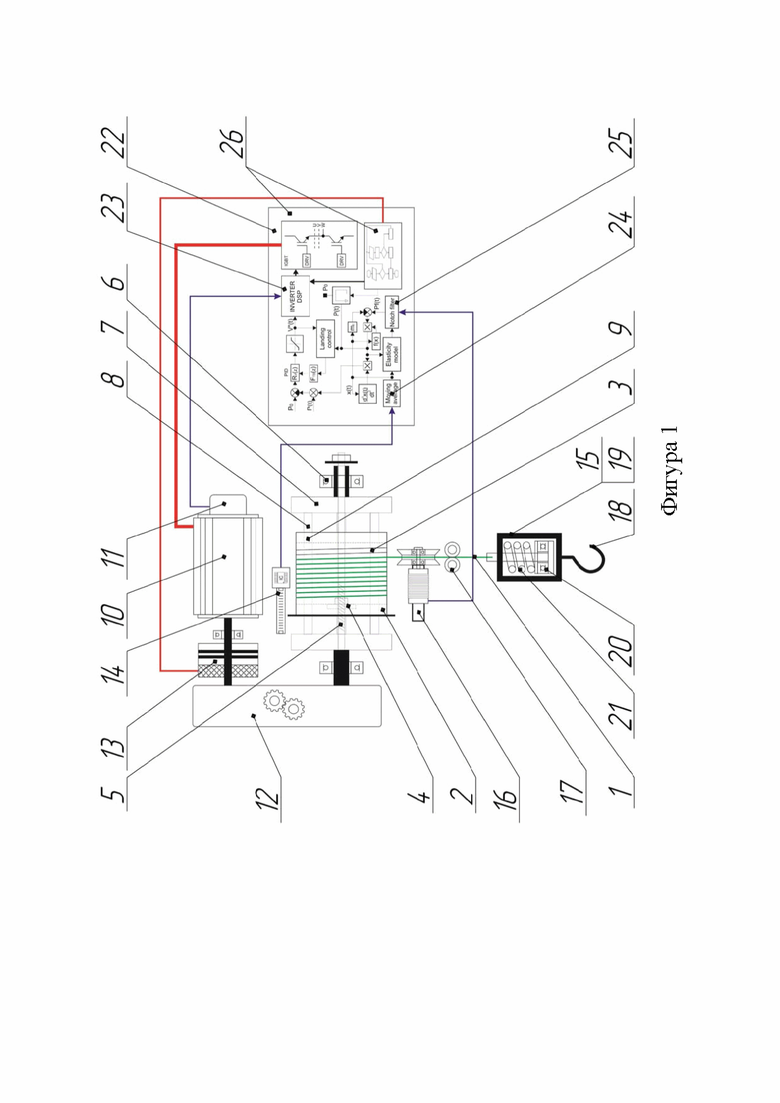
Сущность изобретения поясняется чертежом, на котором представлен частный случай исполнения заявляемого подъемного устройства: на фигуре 1 представлена структурная схема подъёмного устройства, где:
1 – гибкий тяговый орган;
2 – цилиндрический барабан;
3 – спиральная канавка цилиндрического барабана;
4 – гайка шарико-винтовой передачи;
5 – винт шарико-винтовой передачи;
6 – подшипники вращения приводных дисков цилиндрического барабана;
7 – приводные диски вращения цилиндрического барабана;
8 – цилиндрические направляющие вращения цилиндрического барабана;
9 – сквозные отверстия в цилиндрическом барабане пар скольжения с цилиндрическими направляющими;
10 – синхронный серводвигатель (PMSM);
11 – датчик углового положения ротора (энкодер) синхронного серводвигателя;
12 – прецизионный планетарный двухступенчатый редуктор;
13 – электромагнитный дисковый тормоз;
14 – оптический датчик абсолютного положения груза;
15 – крюковое сцепное устройство;
16 – тензометрический датчик натяга гибкого тягового органа;
17 – направляющие ролики для снижения погрешности тензометрического датчика натяга гибкого тягового органа;
18 – крюковая подвеска крюкового сцепного устройства;
19 – корпус крюкового сцепного устройства;
20 – упорный подшипник (вертлюг) крюкового сцепного устройства;
21 – пружина крюкового сцепного устройства;
22 – система управления устройством;
23 – векторный преобразователь частоты, который подключен к датчику углового положения ротора (энкодеру) синхронного серводвигателя (PMSM);
24 – контроллер движения, подключенный к оптическому датчику абсолютного положения груза;
25 – контроллер натяжения (CAP веса) гибкого тягового органа, который подключен к тензометрическому датчику его натяга;
26 – модули системы автоматики, подключенные непосредственно к синхронному серводвигателю (PMSM) и электромагнитному дисковому тормозу.
Частный случай реализации подъемного устройства может быть выполнен следующим образом: подъемное устройство содержит несущую конструкцию, на которой установлены технические средства подъёмной системы.
Причём, технические средства подъёмной системы оборудованы механизмом намотки/смотки гибкого тягового органа 1, состоящим, по меньшей мере, из одного цилиндрического барабана 2, на внешней поверхности которого выполнена спиральная канавка 3 для непосредственной намотки/смотки гибкого тягового органа 1, и который по оси симметрии своей цилиндрической части оборудован шарико-винтовой передачей.
В частности, шаг спиральной канавки 3 может быть равен шагу шарико-винтовой передачи.
При этом механизм намотки/смотки гибкого тягового органа 1 может быть выполнен таким образом, что внутри цилиндрического барабана 2 по оси симметрии его цилиндрической части неподвижно относительно цилиндрического барабана закреплена гайка 4 шарико-винтовой передачи, выполненная с функцией вращательно-поступательного движения с цилиндрическим барабаном 2 относительно винта 5 шарико-винтовой передачи, который неподвижно закреплён через центральную цилиндрическую часть подшипников 6 вращения приводных дисков 7, выполненных с возможностью передачи вращения к цилиндрическому барабану 2, по меньшей мере, через три цилиндрических направляющих 8, внешняя часть которых выполнена с образованием пар скольжения со сквозными отверстиями 9 в цилиндрическом барабане 2 соответственно, расположенными с равным угловым шагом концентрично его внешней диаметральной окружности.
Кроме этого, технические средства подъёмной системы могут дополнительно содержать, по меньшей мере, один синхронный серводвигатель 10 (PMSM) с датчиком 11 углового положения ротора (энкодером) и с приводом вращения приводных дисков 7 цилиндрического барабана 2, по меньшей мере, через один прецизионный планетарный двухступенчатый редуктор 12, на входном первичном валу которого установлен электромагнитный дисковый тормоз 13.
Причём, технические средства подъёмной системы могут дополнительно содержать, по меньшей мере, один оптический датчик 14 абсолютного положения груза.
При этом технические средства подъёмной системы могут дополнительно содержать, по меньшей мере, одно крюковое сцепное устройство 15, закреплённое на выходном конце холостой ветви гибкого тягового органа 1.
Кроме этого, технические средства подъёмной системы могут дополнительно содержать, по меньшей мере, один тензометрический датчик 16 натяга гибкого тягового органа 1, расположенный на холостой ветви гибкого тягового органа 1.
Причём, на холостой ветви гибкого тягового органа 1 между тензометрическим датчиком 16 его натяга и крюковым сцепным устройством 15 могут быть дополнительно установлены направляющие ролики 17, выполненные с возможностью снижения погрешности передачи данных упомянутого тензометрического датчика 16 от угла отклонения гибкого тягового органа 1.
При этом крюковое сцепное устройство 15 в нижней своей части может содержать крюковую подвеску 18, а в верхней – корпус 19, во внутренней нижней части которого расположен упорный подшипник 20 (вертлюг), подпружиненный по внутренней верхней части упомянутого корпуса 19 пружиной 21.
Кроме этого, технические средства подъёмной системы могут быть дополнительно выполнены, по меньшей мере, с одной системой управления 22 устройством, содержащей векторный преобразователь частоты 23, который подключен к датчику 11 углового положения ротора (энкодеру) синхронного серводвигателя 10 (PMSM), контроллер движения 24, подключенный к оптическому датчику 14 абсолютного положения груза, контроллер натяжения 25 (CAP веса) гибкого тягового органа 1, который подключен к тензометрическому датчику 16 его натяга, а также модули 26 системы автоматики, подключенные непосредственно к синхронному серводвигателю 10 (PMSM) и электромагнитному дисковому тормозу 13.
Причём, гибкий тяговый орган 1 может быть выполнен в виде стального троса.
При этом несущая конструкция может быть выполнена в виде металлоконструкции.
Подъёмное устройство работает следующим образом: в зависимости от условий эксплуатации и технического задания технические средства подъёмной системы устанавливаются на несущую конструкцию. Система управления 22 устройством, автоматически определяя и компенсируя вес груза, регулирует его положение за счет слежения за воздействием непосредственно на груз от руки или рук оператора устройства. Механизм намотки/смотки гибкого тягового органа 1 содержит цилиндрический барабан 2 с приводом вращения от синхронного серводвигателя 10 (PMSM) через прецизионный планетарный двухступенчатый редуктор 12. Упомянутый барабан 2 обеспечивает равномерную укладку гибкого тягового органа 1 в спиральной канавке 3, а так же фиксированную точку выхода холостой ветви гибкого тягового органа 1 на тензометрический датчик 16 его натяга с направляющими роликами 17. При этом механизм намотки/смотки гибкого тягового органа 1 может быть выполнен таким образом, что внутри цилиндрического барабана 2 по оси симметрии его цилиндрической части неподвижно относительно цилиндрического барабана закреплена гайка 4 шарико-винтовой передачи, выполненная с функцией вращательно-поступательного движения с цилиндрическим барабаном 2 относительно винта 5 шарико-винтовой передачи, который неподвижно закреплён через центральную цилиндрическую часть подшипников 6 вращения приводных дисков 7, выполненных с возможностью передачи вращения к цилиндрическому барабану 2, по меньшей мере, через три цилиндрических направляющих 8, внешняя часть которых выполнена с образованием пар скольжения со сквозными отверстиями 9 в цилиндрическом барабане 2 соответственно, расположенными с равным угловым шагом концентрично его внешней диаметральной окружности. Ограничение хода цилиндрического барабана 2 осуществляется блокировками, формируемыми оптическим датчиком 14 абсолютного положения груза. Сам оптический датчик 14 абсолютного положения груза может состоять из двух оптронных плат. Согласно алгоритму работы упомянутого датчика 14 производится непрерывное сканирование пространства в ближайшем пространстве напротив фотоэлектрических сенсоров оптронных плат с последующей передачей сигнала к контроллеру движения 24, к которому он подключен. При этом к телу цилиндрического барабана 2 может быть жестко закреплён контрольный диск, на который нанесен слой алюминиевой фольги, хорошо отражающей ИК-излучение. Оптический датчик 14 абсолютного положения груза определяет положение контрольного диска и передаёт данные в систему управления 22 через контроллер движения 24. После чего, в системе управления 22 реализуется передача сигнала определённой команды ограничения движения на векторный преобразователь частоты 23, который подключен к датчику 11 углового положения ротора (энкодеру) синхронного серводвигателя 10 (PMSM), и модули 26 системы автоматики, подключенные непосредственно к синхронному серводвигателю 10 (PMSM) и электромагнитному дисковому тормозу 13. При этом управление синхронным серводвигателем 10 (PMSM) происходит путём передачи на векторный преобразователь частоты 23 разрешающего сигнала «ENABLE», а так же команд управления перемещением типа «PULS-DIR». Конструктивно векторный преобразователь частоты 23 может представлять собой набор из двух связанных механически и электрически печатных плат силовой и управляющей части. Определяющим в системе управления 22 устройства является формирователь задания векторного преобразователя частоты 23, который состоит из двух подсистем: контроллера движения 24 и контроллера натяжения 25 (CAP веса) гибкого тягового органа 1. Контроллер движения 24 отвечает за управление с кнопок, включение/отключение электропитания схемы, дистанционное управление и сигнализации, а контроллер натяжения 25 (CAP веса) гибкого тягового органа 1 реализует главную функцию устройства – управление перемещением груза за счёт непосредственного воздействия на груз рук или руки оператора. При этом учитывается ряд факторов, связанных с автоматизированной моделью технических средств подъёмной системы устройства: наличие трения в подшипниках 6 приводных дисков 7 цилиндрического барабана 2, колебательный характер системы подвес-груз, упругость несущей конструкции, а также вибрации и шумы. Параметры тензометрического датчика 16 натяга гибкого тягового органа 1 через контроллер натяжения 25 (CAP веса) определяют динамические свойства привода вращения цилиндрического барабана 2, отработку особых состояний, например, фиксацию груза, остановку свободного выбега. Например, в составе металлоконструкции устройства колонного типа технические средства подъемной системы могут обеспечить увеличение производительности труда оператора станка с ЧПУ, имеющего возможность вертикальной загрузки/извлечения заготовок. Оператор вручную может перемещать захват заготовок, закреплённых на крюковом сцепном устройстве 15. При этом крюковое сцепное устройство 15 в нижней своей части может содержать крюковую подвеску 18, а в верхней – корпус 19, во внутренней нижней части которого расположен упорный подшипник 20 (вертлюг), подпружиненный по внутренней верхней части упомянутого корпуса 19 пружиной 21. Во время захвата заготовки подаётся команда «балансировка», рукой или руками перемещается искусственно облегченная заготовка в рабочую зону станка и устанавливается в место обработки. После этого, подаётся команда «освободить» и снимается захват. Операции по извлечению и перемещению обработанной детали производятся аналогично. Управляющие команды осуществляются нажатием соответствующих кнопок, которые могут быть расположены на радиопульте дистанционного управления, который может быть зафиксирован на захвате. Перемещение в горизонтальной плоскости происходит за счёт свободного поворота стрелы подъёмного устройства. Возможно применение переломных колен стрелы или каретки. В первом случае технические средства подъёмной системы могут быть закреплены вблизи опоры колонны, а все усилия передаются по гибкому тяговому органу, проходящему через блоки. При применении на стреле каретки или какого-либо другого механизма линейного перемещения на него должен быть установлены сами технические средства подъёмной системы.
Указанный технический результат достигается за счет того, что конструктивное выполнение устройства с цилиндрическим барабаном, который по оси симметрии своей цилиндрической части оборудован шарико-винтовой передачей, а также различными датчиками, учитывающими различные факторы при перемещении грузов, с автоматизированной системой управления, в полной мере обеспечивает повышение быстродействия, точности позиционирования грузов, а также удобство в управлении устройством в целом.
Технических решений, совпадающих с совокупностью существенных признаков заявляемого изобретения, не выявлено, что позволяет сделать вывод о соответствии заявляемого изобретения такому условию патентоспособности как «новизна».
Заявляемые существенные признаки, предопределяющие получение указанного технического результата, явным образом не следуют из уровня техники, что позволяет сделать вывод о соответствии заявляемого изобретения такому условию патентоспособности как «изобретательский уровень».
| название | год | авторы | номер документа |
|---|---|---|---|
| Судовое подъемно-опускное устройство для подводной исследовательской аппаратуры | 1981 |
|
SU988650A1 |
| Устройство с полиспастом для подачи силового кабеля на привязной беспилотный летательный аппарат | 2022 |
|
RU2791943C1 |
| СНАБЖЕННАЯ БАРАБАННОЙ ЛЕБЕДКОЙ ПОДЪЕМНО-ТРАНСПОРТНАЯ УСТАНОВКА С УСТРОЙСТВОМ КОНТРОЛЯ КАНАТА | 2016 |
|
RU2719509C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ПОДЪЕМНОГО УСТРОЙСТВА И ПОДЪЕМНАЯ СИСТЕМА | 2007 |
|
RU2429185C2 |
| Рабочий грузоподъемный орган экскаватора | 2016 |
|
RU2676586C1 |
| СПОСОБ ЭЛЕКТРИЧЕСКОГО УПРАВЛЕНИЯ ПОДЪЕМНЫМ КРАНОМ С МНОЖЕСТВОМ ТОЧЕК ПОДВЕСА | 2007 |
|
RU2445250C2 |
| ДВУХБАЛОЧНЫЙ ПОДЪЕМНЫЙ КРАН С МНОЖЕСТВОМ ТОЧЕК ПОДВЕСА | 2007 |
|
RU2442743C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫЛЕТА В УСТРОЙСТВЕ БЕЗОПАСНОСТИ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271986C2 |
| Мобильная установка для ремонта скважин | 2018 |
|
RU2716674C1 |
| Сдвоенный кабельный кран | 1985 |
|
SU1301769A1 |
Изобретение относится к подъемно-транспортной технике, а именно к подъёмным устройствам, предназначенным для механизации производства, где требуется ручная установка заготовок в станок и съём, и может быть использовано на линиях сборки оборудования, в сервисных центрах, а также на складах. Подъемное устройство содержит несущую конструкцию, на которой установлены технические средства подъёмной системы, которые оборудованы механизмом намотки/смотки гибкого тягового органа, состоящим по меньшей мере из одного цилиндрического барабана, на внешней поверхности которого выполнена спиральная канавка для непосредственной намотки/смотки гибкого тягового органа и который по оси симметрии своей цилиндрической части оборудован шариковинтовой передачей. Достигается расширение эксплуатационных возможностей, заключающихся в повышении быстродействия, точности позиционирования грузов и удобства в управлении. 9 з.п. ф-лы, 1 ил.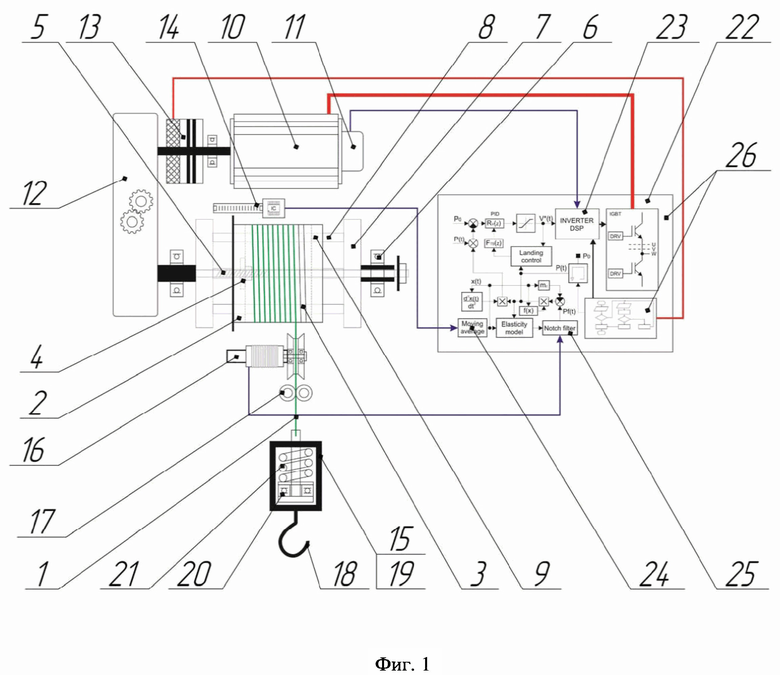
1. Подъемное устройство, содержащее несущую конструкцию, на которой установлена подъёмная система, отличающееся тем, что подъёмная система оборудована механизмом намотки/смотки гибкого тягового органа, состоящим по меньшей мере из одного цилиндрического барабана, на внешней поверхности которого выполнена спиральная канавка для непосредственной намотки/смотки гибкого тягового органа и который по оси симметрии своей цилиндрической части оборудован винтовой передачей, причем механизм намотки/смотки гибкого тягового органа выполнен таким образом, что внутри цилиндрического барабана по оси симметрии его цилиндрической части неподвижно относительно цилиндрического барабана закреплена гайка шариковинтовой передачи, выполненная с функцией вращательно-поступательного движения с цилиндрическим барабаном относительно винта шариковинтовой передачи, который неподвижно закреплён через центральную цилиндрическую часть подшипников вращения приводных дисков, выполненных с возможностью передачи вращения к цилиндрическому барабану по меньшей мере через три цилиндрические направляющие, внешняя часть которых выполнена с образованием пар скольжения со сквозными отверстиями в цилиндрическом барабане соответственно, расположенными с равным угловым шагом концентрично его внешней диаметральной окружности.
2. Подъемное устройство по п. 1, отличающееся тем, что подъёмная система дополнительно содержит по меньшей мере один синхронный серводвигатель с датчиком углового положения ротора и с приводом вращения приводных дисков цилиндрического барабана по меньшей мере через один прецизионный планетарный двухступенчатый редуктор, на входном первичном валу которого установлен электромагнитный дисковый тормоз.
3. Подъемное устройство по п. 1, отличающееся тем, что подъёмная система дополнительно содержит по меньшей мере один оптический датчик абсолютного положения груза.
4. Подъемное устройство по п. 1, отличающееся тем, что подъёмная система дополнительно содержит по меньшей мере одно крюковое сцепное устройство, закреплённое на выходном конце холостой ветви гибкого тягового органа.
5. Подъемное устройство по п. 1, отличающееся тем, что подъёмная система дополнительно содержит по меньшей мере один тензометрический датчик натяга гибкого тягового органа, расположенный на холостой ветви гибкого тягового органа.
6. Подъемное устройство по п. 4 или 5, отличающееся тем, что на холостой ветви гибкого тягового органа между тензометрическим датчиком его натяга и крюковым сцепным устройством дополнительно установлены направляющие ролики, выполненные с возможностью снижения погрешности передачи данных упомянутого тензометрического датчика от угла отклонения гибкого тягового органа.
7. Подъемное устройство по п. 4 или 6, отличающееся тем, что крюковое сцепное устройство в нижней своей части содержит крюковую подвеску, а в верхней – корпус, во внутренней нижней части которого расположен упорный подшипник, подпружиненный по внутренней верхней части упомянутого корпуса пружиной.
8. Подъемное устройство по любому из пп. 1, 3, 4, 6 или 7, отличающееся тем, что подъёмная система выполнена по меньшей мере с одной системой управления устройством, содержащей векторный преобразователь частоты, который подключен к датчику углового положения ротора синхронного серводвигателя, контроллер движения, подключенный к оптическому датчику абсолютного положения груза, контроллер натяжения гибкого тягового органа, который подключен к тензометрическому датчику его натяга, а также модули системы автоматики, подключенные непосредственно к синхронному серводвигателю и электромагнитному дисковому тормозу.
9. Подъемное устройство по любому из пп. 1, 2, 5-8, отличающееся тем, что гибкий тяговый орган выполнен в виде стального троса.
10. Подъемное устройство по п. 1, отличающееся тем, что несущая конструкция выполнена в виде металлоконструкции.
| ЛЕБЕДКА С НАМАТЫВАЮЩИМ УСТРОЙСТВОМ | 2020 |
|
RU2778399C1 |
| СПОСОБ ЗАЩИТЫ ПОЛИОЛЕФИНОВ ОТ ТЕРМООКИСЛИТЕЛЬНОЙ ДЕСТРУКЦИИ | 0 |
|
SU184433A1 |
| KR 0101178587 В1, 30.08.2012 | |||
| CN 14194956 A, 18.03.2022 | |||
| Регулирующий и запорный клапан со шторным затвором | 1956 |
|
SU109115A1 |

