1. Область техники, к которой относится изобретение
Изобретение относится к области радиолокации, в частности к радиолокационным станциям освещения прибрежной береговой, водной и наземной обстановки.
2. Уровень техники
В настоящее время для обеспечения незатененного обзора окружающей поверхности с использованием обзорной радиолокационной станции (РЛС) размещают антенну обзорной РЛС на местности в точке, обеспечивающей максимально возможный незатененный обзор окружающего пространства, и осуществляют последовательный круговой обзор пространства. В случае невозможности, по условиям рельефа местности, обеспечения незатененного обзора пространства с помощью одной РЛС и наличия важных закрытых препятствиями участков местности, для наблюдения за ними устанавливаются дополнительные РЛС с автоматической, автоматизированной или неавтоматизированной передачей необходимых данных об обстановке на подлежащем контролю участке местности на центральный пункт наблюдения с основной РЛС с устройством ввода передаваемой информации в индикатор основной РЛС. Основными недостатками такой системы наблюдения, принимаемой нами в качестве прототипа, является низкая оперативность и точность передачи данных такой неавтоматизированной системой, техническая сложность автоматизированной или автоматической системы, а также сложность обслуживания таких систем. Необходимость установки в системе дополнительных РЛС с круговым обзором у каждой РЛС значительно ухудшает экологическую обстановку в районе установки такой системы.
3. Сущность изобретения
3.1. Предложен способ формирования многокаскадной стационарной радиолокационной станции с беззатененной зоной обзора окружающей поверхности, при котором размещают антенну обзорной радиолокационной станции в точке на местности, обеспечивающей максимально возможный незатененный обзор окружающего пространства, и осуществляют последовательный круговой обзор, обеспечивают обзор затененных участков местности дополнительными автоматическими РЛС с передачей и вводом в индикатор основной РЛС данных обстановки в затененных участках, отличающийся тем, что выявляют наличие в зоне обзора естественных препятствий, закрывающих находящееся за ними пространство, размещают на вершинах указанных препятствий, взамен дополнительной РЛС и системы передачи данных, системы ретрансляторов радиолокационных сигналов, принимают, с использованием указанных систем ретрансляторов, излучаемые антенной РЛС прямые радиолокационные сигналы, транслируют, с усилением или без усиления, через систему ретрансляторов принятые сигналы, излучают принятые сигналы в направлении распространения сигналов в горизонтальной плоскости и с изменением направления в вертикальной плоскости в сторону затененного данным препятствием участка пространства, облучают ретранслированными сигналами находящиеся в зоне тени цели, принимают, транслируют, с усилением или без усиления, через систему ретрансляторов принятые отраженные сигналы, излучают с помощью ретрансляторов в сторону антенны РЛС переотраженные находящимися в зоне тени целями сигналы, принимают антенной РЛС, усиливают и воспроизводят на экране индикатора РЛС отраженные закрытыми целями сигналы, определяют направление на обнаруженные цели и расстояния до них используемым в данной РЛС способом, корректируют дальности до обнаруженных в зоне тени целей с учетом двойного времени задержки распространения радиоволн в системе ретрансляторов.
3.2. Предложено устройство, реализующее способ по п.3.1, включающее основную РЛС с круговым обзором пространства (земной и водной поверхности) с антенной, установленной на местности в точке, обеспечивающей обзор максимально возможной площади окружающего пространства, и дополнительные автоматические РЛС с устройствами передачи и ввода данных в индикатор основной РЛС, отличающееся тем, что в состав основной РЛС, вместо автоматических РЛС с устройствами передачи и ввода данных в индикатор основной РЛС, дополнительно включены системы ретрансляторов, устанавливаемые на вершинах препятствий, вызывающих затенение целей, в линию, перпендикулярную направлению излучения антенны РЛС, причем каждый из ретрансляторов системы включает две антенны - переднюю и заднюю, соединенные своими входами-выходами сверхвысокочастотными (СВЧ) трактами, без усилителей СВЧ или с ними, при этом передние антенны ретрансляторов направлены на антенну РЛС, а задние антенны направлены в горизонтальной плоскости в сторону распространения радиоволн, а в вертикальной плоскости - в сторону находящихся за препятствием целей, что обеспечивает обнаружение находящихся в зоне тени целей, определение направления на обнаруженные цели и расстояния до них, с учетом временных задержек сигналов в ретрансляторах, при распространении радиоволн в сторону цели и обратно.
3.3. Предлагается устройство по п.3.2, отличающееся тем, что в первом варианте каждая система ретрансляторов радиолокационных сигналов представляет собой открытый с боков волновод, ширина которого равна поперечному размеру затеняющего цели препятствия, а поперечный вертикальный разрез имеет форму передней и задней рупорных антенн, соединенных волноводом, причем ось диаграммы направленности в вертикальной плоскости передней антенны направлена на антенну РЛС, а задней антенны - в направлении находящихся в области тени целей, благодаря чему обеспечивается прием, трансляция внутри системы и излучение в нужном направлении поступающих в систему ретранслятора прямых и отраженных сигналов с сохранением диаграммы направленности антенны РЛС в горизонтальной плоскости.
3.4. Предложено устройство по п.3.2, отличающееся тем, что система во втором варианте представляет собой набор идентичных ретрансляторов, каждый из которых включает переднюю и заднюю идентичные антенны, входы-выходы которых соединены СВЧ трактом, размещаемых на вершинах препятствий по всей их ширине на расстояниях друг от друга, обеспечивающих формирование с помощью выходных антенн системы, при облучении их входных антенн, результирующую диаграмму направленности в горизонтальной плоскости, подобную диаграмме направленности облучающей систему антенны РЛС.
3.5. Предложено устройство по п.п.3.2 и 3.4, отличающееся тем, что в третьем варианте в состав каждого из ретрансляторов дополнительно включены два усилителя прямых и отраженных СВЧ сигналов и два устройства разделения прямых и отраженных сигналов передней и задней антенн, причем вход-выход устройства разделения прямых и отраженных сигналов передней антенны соединен с выходом-входом передней антенны, выход прямых сигналов которого соединен с входом СВЧ усилителя прямых сигналов, а вход отраженных сигналов указанного устройства соединен с выходом СВЧ усилителя отраженных сигналов, выход СВЧ усилителя прямых сигналов соединен с входом устройства разделения прямых и отраженных сигналов задней антенны, выход-вход которого соединен с входом-выходом задней антенны, а выход указанного устройства соединен с входом СВЧ усилителя отраженных сигналов, благодаря чему в ретрансляторе обеспечивают прием передней антенной прямых сигналов РЛС, их трансляцию на вход СВЧ усилителя прямых сигналов, усиление прямых сигналов, трансляцию усиленных сигналов на вход задней антенны и их излучение в сторону целей, прием отраженных целями сигналов задней антенной ретранслятора, трансляцию на вход СВЧ усилителя отраженных сигналов, усиление отраженных сигналов, трансляцию усиленных отраженных сигналов на вход передней антенны и их излучение в сторону антенны РЛС, обеспечивая тем самым обнаружение целей в области тени в обход препятствий и определение их координат.
4. Перечень чертежей и иных материалов.
Фиг.1 - схема многокаскадной радиолокационной станции.
Фиг.2 - устройство системы ретрансляторов по первому варианту.
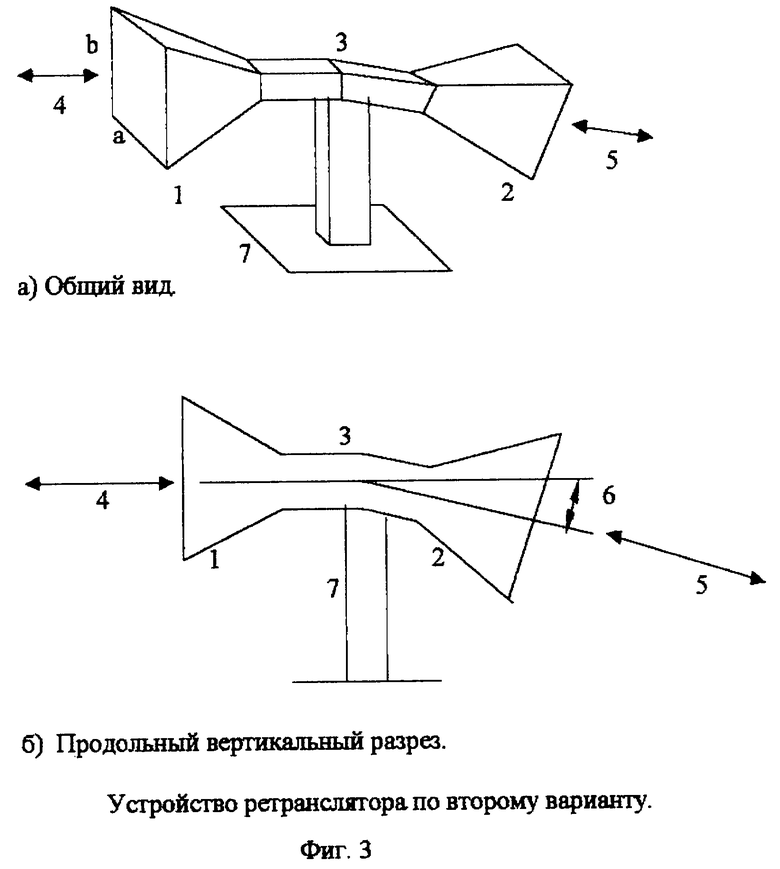
Фиг.3 - устройство ретранслятора по второму варианту.
Фиг.4 - блок-схема ретранслятора по третьему варианту.
Фиг.5 - пример использования многокаскадной РЛС для расширения зоны обзора акватории морского порта.
Фиг.6 - пример использования многокаскадной РЛС для расширения зоны обзора речной диспетчерской системы.
В табл. 1 приведены используемые в описании условные обозначения.
5. Сведения, подтверждающие возможность осуществления изобретения
Типовая схема многокаскадной радиолокационной станции приведена на фиг. 1.
На фиг.1 представлена обычная радиолокационная станция обзора окружающей земной или водной поверхности 1, расположенная на возвышенности для обеспечения оптимальной зоны обзора. На расстоянии от антенны РЛС - R расположена цель 2. В нашем примере имеется водная поверхность и морская цель. Цель закрыта от антенны РЛС высоким островом 3.
Антенна РЛС, с диаграммой направленности в вертикальной плоскости 4 имеет непосредственно за островом зону тени протяженностью Rт 5, в которой она не имеет возможности обнаруживать морские цели.
В настоящее время для обеспечения наблюдения целей, находящихся в зоне тени, используются дополнительные РЛС. В нашем случае должна быть установлена на вершине острова 3 еще одна дополнительная РЛС с автоматическим управлением и передачей изображения на основную РЛС 1, а также дополнительная аппаратура на посту основной РЛС, обеспечивающая отображение информации от дополнительной РЛС на экране основной РЛС, Получается весьма сложная и дорогостоящая система со сложным обслуживанием и дополнительной затратой энергии.
Вместо перечисленных мероприятий предлагается разместить на вершине препятствия 3, на расстоянии от антенны РЛС - R1, систему ретрансляторов 6, обеспечивающую прием прямых сигналов от РЛС и их трансляцию в сторону находящейся в области тени, на расстоянии Rц от системы ретрансляторов, цели, а также прием отраженных целью сигналов и их ретрансляцию в сторону антенны РЛС.
При предлагаемом способе формирования многокаскадной стационарной РЛС с беззатененной зоной обзора окружающей поверхности выполняется следующая последовательность действий.
Выявляют наличие и размещение на местности относительно антенны РЛС естественных препятствий (остров 3 на фиг.1), закрывающих находящееся за ними пространство. Размещают на вершине каждого из выявленных препятствий систему ретрансляторов радиолокационных сигналов (система 6 на фиг.1). Принимают, с использованием указанной системы ретрансляторов, излучаемые антенной РЛС 1 в направлении системы ретрансляторов 6, при ее круговом вращении, прямые радиолокационные сигналы. Транслируют через систему ретрансляторов 6, с усилением или без усиления, принятые сигналы. Излучают принятые прямые и оттранслированные в системе сигналы в направлении распространения сигналов в горизонтальной плоскости (см. фиг.1а) и с изменением направления в вертикальной плоскости в сторону затененного данным препятствием участка пространства (см. фиг.1б). Облучают ретранслированными и излученными сигналами находящиеся в зоне тени цели (см. позицию 2 на фиг.1). Принимают отраженные находящимися в зоне тени целями сигналы и ретранслируют их, с помощью ретрансляторов, в сторону антенны РЛС 1. Усиливают отраженные закрытыми целями сигналы и воспроизводят их штатным способом на экране индикатора РЛС. Определяют направление на обнаруженные закрытые цели и расстояние до них используемым в данной РЛС штатным способом. Корректируют дальности до обнаруженных в зоне тени целей в сторону их уменьшения, с учетом дополнительного двойного времени задержки сигнала в системе ретрансляторов при их прохождении в прямом и обратном направлениях.
Рассмотрим вопрос определения дальности обнаружения целей в процессе функционирования предлагаемой многокаскадной РЛС.
При рассмотрении данного вопроса, в том числе при выводе зависимостей и расчетных формул, нами использованы методика и расчетные формулы, приведенные в книге К.В. Голева, Расчет дальности действия радиолокационных станций, Сов. Радио, М., 1962 г.
Схема многокаскадной РЛС представлена на фиг.1.
Как видно из фиг.1, обычная РЛС наблюдения установлена на берегу (точка 1). Морская цель находится в точке 2 на расстоянии R от РЛС.
Между антенной РЛС 1 и целью 2 расположен высокий остров 3, закрывающий полностью цель 2 для диаграммы направленности антенны РЛС 4, имеющий вследствие этого за островом область тени 5 протяженностью Rт. Для просмотра области тени 5 осуществляется формирование многокаскадной РЛС с использованием РЛС 1 и системы ретрансляторов радиолокационных сигналов 6, установленных на вершине острова перпендикулярно направлению наблюдения целей на расстоянии R1 от антенны РЛС. Обозначим расстояние от системы ретрансляторов до цели в зоне тени через Rц, а общее расстояние от РЛС до цели через R.
Полагаем, что система ретрансляторов состоит из передних и задних антенн, соединенных СВЧ трактом с коэффициентом передачи КРТ. Ось диаграммы направленности антенны РЛС в вертикальной плоскости направлена на антенны ретрансляторов 6. Оси передних антенн ретрансляторов направлены на антенну РЛС. Оси задних антенн ретрансляторов направлены строго в противоположную от антенны РЛС сторону в горизонтальной плоскости и вниз, в сторону находящихся в области тени целей, в вертикальной плоскости (см. фиг.1).
Излучаемая энергия у антенны РЛС SРЛСli в направлении на каждую антенну ретранслятора i(i=1-k) может быть определена из выражения.

где Ри - импульсная мощность передатчика РЛС - Вт;
Gрлc - коэффициент усиления антенны РЛС;
F(ϕгi, ϕвi) - характеристика направленности антенны РЛС по напряженности поля в функции углов, отсчитываемых от направления максимума излучения в горизонтальной (ϕгi) и вертикальной (ϕвi) плоскостях.
Плотность потока энергии на входе антенны ретранслятора i-й системы ретрансляторов - Sртli, на расстоянии от антенны РЛС - R1 с потерями в атмосфере V1, равна:
Эффективная площадь антенн системы ретрансляторов Apтi в направлениях ϕгi и ϕвi определяется, в общем случае, выражением:
Aртi = ASрт•η•F2ртi(ϕгi, ϕвi), (3)
где ASpт - геометрическая площадь антенны, м2;
η - коэффициент использования площади антенны;
Fртi(ϕгi, ϕвi) - характеристика направленности i-й антенны системы ретрансляторов по напряженности поля.
Передние антенны ретрансляторов направлены на антенну РЛС. В связи с этим, можно полагать для передних антенн ретрансляторов величину углов ϕгi и ϕвi равными нулю. Для этого случая F2ртi(ϕгi, ϕвi)=1 и ее в выражении (3) можно не учитывать. Исключением из указанного является учет диаграмм направленности задних антенн ретрансляторов, направленных в сторону находящихся в зоне тени целей. Для этих антенн необходимо учитывать взаимное расположение антенн и цели, а также направления осей диаграмм направленности антенн в вертикальной и горизонтальной плоскостях относительно цели.
С учетом изложенного, энергия сигнала, принятого передней антенной ретранслятора i, определяется выражением
Pртli=Sртli•Aртi. (4)
Поступившая в переднюю антенну ретранслятора энергия Ppтli транслируется с усилением или без усиления с коэффициентом Крт на вход задней антенны ретранслятора и излучается в пространство в сторону находящихся в области тени целей.
Поверхностная плотность энергии на выходе задней i-й антенны ретранслятора Spт2i равна
Sрт2i=(Рртli•Kрт•Gртi)/4π. (5)
С учетом того, что
Gртi = 4π•ASрт•F2ртi(ϕгi, ϕвi)/λ2, (6)
выражение 5 можно переписывать в виде:
При рассмотрении условий облучения находящихся в области тени целей на последнем этапе их обнаружения многокаскадной РЛС будем исходить из следующих положений:
1. Наблюдаемая цель находится на оси диаграммы направленности антенны РЛС в горизонтальной плоскости.
2. Результирующая диаграмма направленности задних антенн ретрансляторов в горизонтальной плоскости аналогична диаграмме направленности антенны РЛС.
3. В вертикальной плоскости оси диаграмм направленности задних антенн ретрансляторов направлены в сторону вероятного места расположения целей.
С учетом указанных положений, принимаем, что изменение облучающего цели и отраженного полей для задних антенн ретрансляторов в горизонтальной плоскости аналогично распределению поля антенны РЛС, облучающего передние антенны ретрансляторов, а величину Fртi(ϕгi, ϕвi) из-за изменения вертикального угла ϕвi для задних антенн ретрансляторов, можно принять равной единице и ее изменение не учитывать.
Поверхностная плотность энергии у цели - Sцli на расстоянии Rц от системы ретрансляторов, с потерями в атмосфере Vц составит:
Переизлученное целью поле в сторону задних антенн системы ретрансляторов Sц2i равно величине облучающего поля, помноженной на коэффициент переизлучения поля точечным эквивалентом цели I = σ/4π, где σ - эффективная площадь рассеяния (ЭПР) точечного эквивалента цели.
Sц2i = Sц1i•σ/4π. (9)
В развернутом виде выражение 9 для величины Sц2i представляется в виде
Выражение 10 состоит из пята дробных членов, первый из которых характеризует излучение РЛС, второй - потери сигнала при распространении радиоволн от РЛС до ретрансляторов, третий - прохождение сигналов в i-м ретрансляторе, четвертый - потери сигнала при распространении радиоволн от ретрансляторов до цели и пятый характеризует переотражение радиоволн целью. При распространении радиоволн в обратном направлении потери сигнала при распространении в атмосфере (дроби 4 и 2) и при прохождении в ретрансляторах будут идентичны потерям при прохождении прямых сигналов.
Для определения поверхностной плотности отраженной целью энергии у антенны РЛС - Spлc2 необходимо учесть изменение энергии с использованием указанных выше членов выражения 10 - четвертого, третьего и второго, умножив на них выражение 10. В результате этого, выражение для определения величины Sрлс2 примет вид:
Мощность отраженных целью сигналов, приходящая к антенне РЛС от каждого i-гo ретранслятора - Рпр, принимается антенной РЛС и поступает через СВЧ тракт на вход приемника РЛС. Обозначим эффективную площадь антенны РЛС через Aрлс = Gрлс•λ2/4π. Тогда величина Рпр для сигнала от i-го ретранслятора может быть определена из выражения:
Выше нами было отмечено, что суммарная диаграмма направленности антенн системы ретрансляторов в горизонтальной плоскости идентична диаграмме направленности РЛС. В связи с этим справедливо равенство:
Fртi(ϕгi, ϕвi) = F(ϕгi, ϕвi). (12)
Необходимо отметить, что выражение 11 определяет величину принимаемой антенной РЛС мощности от одного из i-х ретрансляторов системы ретрансляторов. Полная принимаемая мощность отраженного сигнала будет равна сумме сигналов, пришедших от всех К антенн ретрансляторов системы.
С учетом изложенного, суммарная мощность отраженных сигналов, принятых антенной РЛС, определяется выражением:
Объединив в общее произведение первую и вторую суммы, получим выражение для значения принимаемой антенной РЛС суммарной мощности сигналов - Рпр.
Операторов РЛС обычно интересует дальность обнаружения различных целей при заданных параметрах РЛС. В предлагаемой многокаскадной РЛС дальность расположения системы ретрансляторов определяется расположением РЛС относительно препятствия - величина постоянная. Переменной величиной является дальность обнаружения цели от системы ретрансляторов - Rц. Преобразовав выражение 14 относительно расстояния Rц, получим выражение для дальности обнаружения скрытых препятствием целей, сначала Rц, затем R = R1 + Rц.
Для удобства написания и обращения с формулами, обозначим.



где Прлс - энергетический потенциал РЛС;
СУМ(F) - сумма величин характеристик направленности;
Прт - коэффициент передачи энергии ретранслятором.
С учетом проведенных преобразований, выражение для дальности обнаружения целей многокаскадной РЛС - R принимает вид:
Нами предлагается несколько конструкций систем ретрансляторов и входящих в их состав устройств.
Для различных конструкций ретрансляторов получатся различные значения дальности обнаружения целей.
Конструкция первого варианта из предлагаемых систем ретрансляции (пункт 3.3 раздела 3) представлена на фиг.2. Конструкция системы ретрансляторов (фиг. 2а) состоит из одного устройства, представляющего собой открытый с концов волновод шириной - а, равной поперечному размеру затеняющего цели препятствия, т.е. поперечному размеру затеняющей возвышенности или острова, как показано на фиг.1. Как видно из фиг.2б, в продольном вертикальном разрезе конструкция ретранслятора представляет собой две рупорные антенны - переднюю 1 и заднюю 2, соединенные волноводом 3. Передняя антенна ретранслятора 1 направлена в вертикальной и горизонтальной плоскостях на антенну РЛС (см. стрелку 4 на фиг.2). Задняя антенна ретранслятора 2 направлена в горизонтальной плоскости в противоположную от антенны РЛС сторону, а в вертикальной плоскости - в сторону расположенных в области тени целей (см. стрелку 5 на фиг.2). Благодаря изложенной конструкции системы ретрансляторов, обеспечивается прием антенной 1 прямых сигналов РЛС, трансляция по волноводу 3 внутри системы принятых сигналов от передней антенны 1 к задней антенне 2, излучение задней антенной 2 принятых прямых и оттранслированных в системе сигналов в направлении расположенных за препятствием целей - по стрелке 5. под углом 6 от направления 4. Затем обеспечивается прием отраженных целями сигналов задней антенной 2, их трансляция по волноводу 3 на выход-вход передней антенны 1 и излучение передней антенной 1 отраженных целями и оттранслированных системой ретранслятора сигналов в сторону антенны РЛС.
Характерной особенностью указанной системы ретранслятора является простота ее конструкции и минимальное искажение формы диаграммы направленности (ДН) антенны РЛС в горизонтальной плоскости при прохождении через такую систему. Минимальное искажение ДН обусловлено тем, что при прохождении через указанную систему открытого с боков волновода в облучающем систему электромагнитном поле не происходит фазовых изменений во фронте электромагнитных волн в горизонтальной плоскости. В связи с этим, на выходе системы фазовые соотношения во фронте электромагнитных волн в горизонтальной плоскости остаются неизменными.
Диаграмма направленности указанной системы в вертикальной плоскости определяется вертикальным размером антенны - а (фиг.2а). Реальные максимальные вертикальные размеры антенны ретранслятора для 3-см длины волны РЛС можно принять не более 1-2 м. Для оценочных расчетов примем а=1 м. Облучающее антенну поле в вертикальной плоскости из-за малых размеров апертуры антенны ретранслятора можно принять равномерным. Для этого случая, ширину ДН антенны в градусах по уровню 3дБ - ϕв можно определить по формуле (см. табл. 4.3 - стр. 162 в книге Справочник по основам радиолокационной техники. Редактор В. В. Дружинин, М., Воениздат МО СССР, 1967).
ϕв = 51•a/λ. (18)
Для длины волны 3 см и а=1 м получим: ϕв=16,35o, что соизмеримо с величиной типовой ДН антенны обзорной РЛС в вертикальной плоскости, равной 18-25o.
Примем для оценочных расчетов ширину ДН антенны РЛС в горизонтальной плоскости равной, 1o, а в вертикальной плоскости 20o.
Определим по выражениям 16 параметры рассматриваемой системы ретранслятора Прт и СУМ(F). При выполнении расчетов СУМ(F) для этой системы ретрансляторов, в которой используется одна антенна с размерами в горизонтальной плоскости, равными ширине луча ДН антенны РЛС в этой плоскости, искусственно разобьем антенну на несколько антенн (например, 21), непосредственно соприкасающихся друг с другом в горизонтальной плоскости и облучаемых полем различной напряженности, соответствующей диаграмме направленности антенны РЛС. Тогда значение показателя СУМ(Fi) равно сумме всех составляющих поля (21).
Значение величины Прт определим с использованием выражения:
Для определения величины ASpт необходимо знать вертикальные и горизонтальные размеры передней и задней антенн ретранслятора. Как было указано выше, вертикальный размер антенн можно принять равным а=1 м. Горизонтальный размер указанной системы и антенны ретранслятора определяется горизонтальными размерами препятствия. Действующая ширина антенны ретранслятора Ln определяется шириной участка антенны, облучаемого ДН антенны РЛС в горизонтальной плоскости - ϕг, зависящей от расстояния от антенны РЛС до системы ретрансляторов - R1. Для определения величины Ln можно использовать выражение:
Ln=2•R1•Тan(ϕг/2). (20)
Из выражения 20 следует, что горизонтальный размер антенны прямо пропорционален расстоянию до системы ретрансляторов R1. Тогда выражение 19 можно переписать в виде
где
Выражение для Rц при использовании системы ретрансляторов первого варианта примет вид

Из полученного выражения следует, что при использовании в многокаскадной РЛС системы ретрансляторов первого варианта величина дальности Rц не зависит oт R1.
При выполнении расчетов, для учета неравномерности облучающего поля в горизонтальной плоскости, как было указано выше, условно разобьем сплошную антенну на ряд участков-антенн, облучаемых полем различной интенсивности, с последующим суммированием полей от отдельных участков.
Для проведения оценочных расчетов нами приняты следующие исходные данные. РЛС обнаружения имеет антенну с диаграммами направленности в горизонтальной плоскости 1o, в вертикальной плоскости - 20o. Коэффициент усиления антенны - 1600. Излучаемая мощность передатчика - 10 кВт. Длина волны 3 см. Реальная чувствительность приемника по входу антенны - 10-12 Вт. Коэффициент передачи энергии в ВЧ тракте ретранслятора Крт - 0,9. ЭПР цели - 10, 100 и 1000 м2 Антенна системы ретрансляторов расположена так, что функция ослабления в интерференционной зоне на участке от антенны РЛС до антенны ретранслятора - V1 равна 2. Размеры антенны высота 1 м, ширина - в зависимости от расстояния до антенны РЛС (см. выражение 20).
Проведенные оценочные расчеты дальностей обнаружения закрытых препятствием надводных целей для различных расстояний R1 приведены в табл. 2.
Результаты расчетов показывают, что предлагаемая система ретрансляторов с рассматриваемой сплошной антенной системой позволяет обнаруживать закрытые препятствием цели на приемлемых для практики расстояниях, в частности при R1<2-3 км.
Конструкция ретранслятора второго вида, входящего в состав системы ретрансляции по пункту 3.4 раздела 3, представлена на фиг 3. Конструкция ретранслятора (фиг. 3а) состоит из устройства, представляющего собой две рупорные антенны (или антенны любого другого типа) - переднюю 1 и заднюю 2 с шириной раскрыва - а, высотой - b, соединенные своими входами-выходами друг с другом СВЧ трактом 3.
Передняя антенна ретранслятора 1 направлена в вертикальной и горизонтальной плоскостях на антенну РЛС (см. стрелку 4 на фиг.3). Задняя антенна ретранслятора 2 направлена в горизонтальной плоскости в противоположную от антенны РЛС сторону, а в вертикальной плоскости - в сторону расположенных в области тени целей (см. стрелку 5 на фиг.3). Благодаря изложенной конструкции ретранслятора, обеспечивается прием антенной 1 прямых сигналов РЛС, трансляция по СВЧ тракту 3 внутри ретранслятора принятых сигналов от передней антенны 1 к задней антенне 2, излучение задней антенной 2 принятых прямых и оттранслированных в системе сигналов в направлении расположенных за препятствием целей - по стрелке 5, под углом 6 от направления 4. Для отраженных цепями сигналов обеспечивается их прием задней антенной 2, трансляция на выход-вход передней антенны 1 и излучение передней антенной 1 в сторону антенны РЛС.
На вершине препятствия, по всей его ширине, устанавливается необходимое число ретрансляторов, на расстояниях один от другого dL, из расчета обеспечения одновременного облучения диаграммой направленности РЛС такого числа ретрансляторов - N, которое обеспечивает обнаружение в зоне тени цели с заданной ЭПР на требуемом расстоянии Rц, примерно равном Rт Ширина одновременно облучаемого участка системы ретрансляторов Ln определяется с использованием выражения 20, a dL=L/N.
В табл. 3 представлены результаты расчетов дальностей обнаружения целей Rц с ЭПР 10, 100 и 1000 м2 для расстояний R1 от 1 до 7 км. Размеры и площадь раскрыва антенн ретрансляторов: а=b=1 м, площадь - 1 м2, Крт=0,9. Параметры РЛС аналогичны параметрам РЛС по первому варианту ретранслятора. Расстояния между ретрансляторами dL=2,5 м. Число одновременно облучаемых ретрансляторов определяется по выражению 25.
N=Ln/dL. (25)
Результаты расчетов показывают, что дальности обнаружения закрытых целей многокаскадной РЛС с использованием второй системы ретрансляторов значительно меньше, чем для системы со сплошной антенной системой. Однако, при малых расстояниях R1, такая система, учитывая ее простоту, может быть с успехом использована. При этом должно быть обеспечено равенство Rц и Rт.
На фиг. 4 представлена блок-схема ретранслятора третьего варианта, по пункту 4.5 раздела 4. Она включает следующие основные узлы: переднюю антенну ретранслятора 1, устройство разделения прямых и отраженных сигналов передней антенны 2, усилитель прямых СВЧ сигналов 3, устройство разделения прямых и отраженных сигналов задней антенны 4, заднюю антенну ретранслятора 5 и усилитель отраженных СВЧ сигналов 6.
Функционирует устройство следующим образом. Передняя антенна ретранслятора 1 принимает излучаемые антенной РЛС сигналы. С выхода-входа передней антенны ретранслятора 1 принятые сигналы поступают на вход-выход устройства разделения прямых и отраженных сигналов передней антенны 2, с выхода которой указанные сигналы поступают на вход усилителя прямых СВЧ сигналов 3. В устройстве 2 возможность поступления прямых сигналов на его выход и затем на выход устройства 6 заблокировано.
Прямые сигналы, поступившие на вход усилителя прямых СВЧ сигналов 3, усиливаются и поступают на выход устройства 3, а затем на вход устройства разделения прямых и отраженных сигналов задней антенны 4, с выхода-входа которого поступают на вход-выход задней антенны ретранслятора 5. В устройстве 4 возможность выхода прямых сигналов на вход усилителя отраженных СВЧ сигналов 6 заблокирована. Поступившие на вход-выход задней антенны ретранслятора 5 усиленные прямые сигналы излучаются в направлении находящихся в зоне тени целей.
Отраженные целями сигналы принимаются задней антенной ретранслятора 5 и с ее входа-выхода поступают выход-вход устройства разделения прямых и отраженных сигналов задней антенны 4, с выхода которого поступают на вход усилителя отраженных СВЧ сигналов 6. При этом в устройстве 4 блокируется возможность поступления отраженных сигналов на вход этого устройства и затем на выход усилителя прямых СВЧ сигналов 3. Усиленные устройством 6 отраженные сигналы с выхода этого устройства поступают на вход устройства разделения прямых и отраженных сигналов передней антенны 2. С входа-выхода устройства 2 усиленные отраженные сигналы поступают на выход-вход передней антенны ретранслятора 1 и излучаются антенной в направлении антенны РЛС. В устройстве разделения прямых и отраженных сигналов передней антенны 2 обеспечивается блокада возможности поступления отраженных сигналов на выход этого устройства.
Благодаря изложенному выше функционированию ретранслятора, обеспечивается прием ретранслятором прямых сигналов РЛС, усиление сигналов и их излучение за препятствие, в сторону находящихся за препятствием, в тени для РЛС, целей, а также прием отраженных указанными целями сигналов, их усиление и излучение в сторону антенны РЛС.
Техническая реализация ретранслятора по предлагаемой блок-схеме не может вызвать значительных трудностей. Передняя и задняя антенны ретранслятора могут быть любого типа, в частности, могут быть использованы рупорные антенны.
Не может вызвать больших трудностей и техническая реализация устройств разделения прямых и отраженных сигналов передней и задней антенн. Для разделения сигналов в технике СВЧ широко используются различные устройства, такие как направленные ответвители, ферритовые вентили, ферритовые циркуляторы и т.п. Направленные ответвители обеспечивают потери прямых сигналов не более 3 дБ и развязку в 25 дБ (см. "Основы проектирования микроэлектронной аппаратуры", под редакцией Б.Ф. Высоцкого, М., Сов. радио, 1977). Для обеспечения однонаправленной проводимости могут быть использованы ферритовые вентили, обеспечивающие разделение сигналов с потерями в прямом направлении не более 3 дБ (см. "Справочник конструктора РЭА", под редакцией Р.Г. Варламова, М., Радио и связь, 1985, с. 250).
Усилители прямых и отраженных СВЧ сигналов известны и широко используются в радиолокационной технике. Так в книге Антенны и устройства СВЧ (проектирование ФАР) под редакцией Д.Н. Вознесенского. М., Радио и связь, 1981, с. 318, отмечается, что при малых уровнях сигнала для усилителей СВЧ на лавинно-пролетных диодах максимальное значение коэффициента усиления не превышает 20 дБ в диапазоне частот 3-10 ГГц. Там же отмечается, что шумовые характеристики указанных усилителей хуже, чем у транзисторных. Там же на стр. 251 отмечается, что в сантиметровом диапазоне могут использоваться транзисторные усилители с коэффициентами усиления 2-3 дБ. При этом, для повышения коэффициента усиления могут быть использованы многокаскадные усилители (стр.259). При использовании трех каскадов усиления можно получить коэффициент усиления до 10.
Там же на стр. 265 отмечается, что при использовании транзисторных усилителей можно получить в диапазоне частот до 3000 МГц усиление в 5 -10 раз.
На основе изложенного можно считать, что при использовании в предлагаемом ретрансляторе усилителей СВЧ на полупроводниковых приборах можно получить усиление сигналов в 5 - 10 раз.
В табл. 4, 5 и 6 приведены результаты расчетов Rц для систем ретрансляторов третьего варианта по основным исходным данным РЛС и системы ретрансляторов второго варианта, но с различными значениями коэффициента Крт (от 2 до 10) и R1 (от 1 до 7).
Целесообразно остановиться на возможности внедрения в ретрансляторы данного типа мощных усилителей, использующихся в передатчиках РЛС. Известно (см. Справочник по радиолокации. Под редакцией М. Сколник. Том 3. Глава 1. Радиолокационные передатчики), что передатчики РЛС могут строиться по схеме генератора, управляемого модулятором, и по схеме усилителя СВЧ, усиливающего импульсы задающего генератора. Передатчики, построенные по схеме усилителя, могут быть с успехом использованы в качестве мощных усилителей СВЧ ретрансляторов. Учитывая автономность работы ретрансляторов, нецелесообразно использовать в них сложные устройства, требующие постоянного ухода и потребляющие много энергии. Однако, для осмотра весьма важных направлений могут быть использованы и относительно мощные усилители СВЧ.
В табл. 7 приведены характеристики мощных импульсных усилителей, приведенных на стр.20 указанного выше справочника.
Данные табл. 7 показывают, что в ретрансляторах третьего варианта довольно просто могут быть использованы Биматрон и Битермитрон с управляющими сетками, на которые можно подавать предварительно усиленные прямые и отраженные сигналы. Указанные усилители обеспечивают усиление сигналов до 20-30 дБ. С учетом предварительного усиления общее усиление сигналов в СВЧ усилителях ретрансляторов может составить 25-35 дБ.
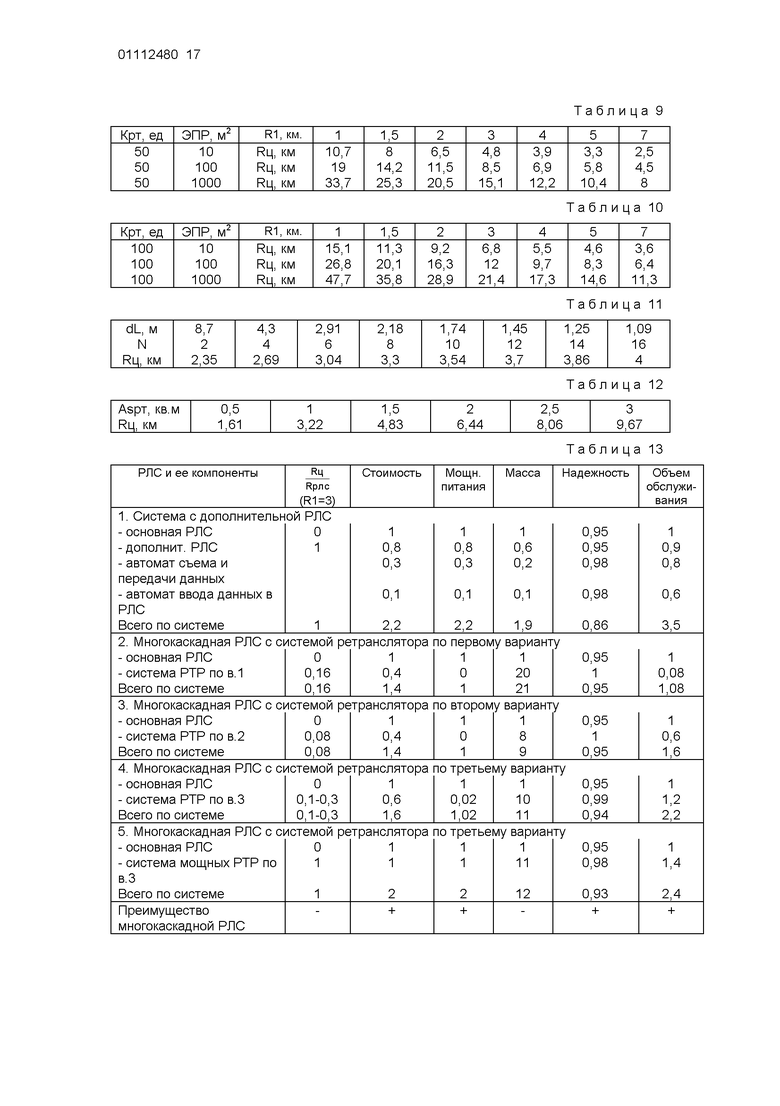
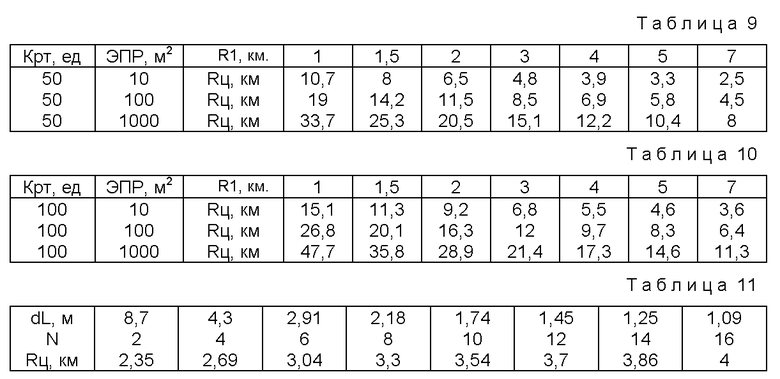
Приведенные в табл. 8-10 результаты расчетов дальностей обнаружения различных целей многокаскадной РЛС с мощными ретрансляторами показывают, что при Крт=25 дальность обнаружения целей многокаскадной РЛС при R1=1000 м равны дальности обнаружения обычной РЛС. При Крт, равных 50 и 100, равенство дальностей наступает уже при больших значениях R1, равных 1630 и 2600, соответственно.
В табл. 11 приведены данные об изменении дальности обнаружения цели - Rц, имеющей ЭПР=10 м2, для многокаскадной РЛС с системой ретрансляторов по варианту 3 при Крт=5, ASpт=1 м2 и R1=1000 м от изменения расстояния между ретрансляторами - dL, а следовательно, и числа одновременно облучаемых ретрансляторов - N.
Результаты расчетов показывают, что с увеличением числа облучаемых ретрансляторов дальность обнаружения целей растет не пропорционально их количеству. В связи с этим, увеличивать дальность обнаружения целей путем увеличения числа ретрансляторов в системе целесообразно только до определенной степени.
Остановимся на влиянии размеров антенн ретрансляторов на дальность обнаружения целей. В табл. 12 представлены результаты расчетов дальностей обнаружения целей Rц для многокаскадной РЛС с характеристиками, аналогичными для определения данных для табл.11 и 5, при изменении площади раскрыта антенн ретрансляторов от 0,5 до 3 м2.
Результаты расчетов показывают, что размер площади антенн ретрансляторов оказывает сильное влияние на дальность действия многокаскадной РЛС. Дальность действия РЛС прямо пропорциональна площади антенн ретрансляторов.
Из изложенного выше можно заключить, что при определении целесообразного расстояния между ретрансляторами, их числа и необходимой площади антенн ретрансляторов нужно исходить из конкретных условий местности, требуемых характеристик системы обнаружения и желания решения задачи с меньшим числом ретрансляторов и учетом показателя "эффективность/стоимость".
В табл. 13 приведены сравнительные характеристики прототипа и трех вариантов предлагаемой многокаскадной РЛС. В качестве прототипа выбрана система наблюдения с основной РЛС и дополнительной автоматической РЛС, размещенной на вершине препятствия, обеспечивающей обзор пространства в области тени В данной системе, для передачи изображения на экран основной РЛС, дополнительно установлена автоматическая линия съема и передачи данных, а также аппаратура автоматического ввода информации в индикатор основной РЛС.
Затем в табл. 13 помещены данные по предлагаемой многокаскадной РЛС с различными системами ретрансляторов (РТР) - 1, 2 и 3 вариантов. Для общности оценок и расчетов принято, что длина всех вариантов систем РТР - L равна 100 м. Расстояния между ретрансляторами dL=2,5 м. Число РTP в системе N=40. При сравнении дальностей обнаружения целей использовались данные табл. 3-6 для R1= 3 км. Для системы РТР по варианту 3 приняты значения Крт в пределах от 2 до 10, а также системы РТР по варианту 3 с мощными усилителями СВЧ и их Крт, равными 25, 50 и 100 с результатами расчетов, приведенными в табл. 8, 9 и 10.
При определении надежности прототипа и различных вариантов систем ретрансляторов нами было использовано выражение для определения надежности совокупности последовательных элементов сложных систем, приведенное в книге Б. Р. Левина, Теория надежности радиотехнических систем, М., Советское радио, 1978.

где Pj - вероятность выхода из строя элемента системы j;
Pn - вероятность выхода из строя системы;
j - номер элемента системы;
n - общее число элементов в системе.
Для оценочных расчетов приняты следующие показатели надежности элементов системы:
- основной и дополнительной РЛС - 0,95;
- сложной дополнительной аппаратуры - 0,98;
- простой дополнительной аппаратуры - 0,99;
- ретрансляторов первого и второго вариантов, не имеющих электронных устройств - 1.
Анализ полученных в табл. 13 данных показывает, что по дальности обнаружения скрытых препятствием целей преимуществом обладает система с дополнительной автоматической РЛС, за исключением предлагаемой РЛС с мощными ретрансляторами по варианту 3. По массо-габаритным показателям значительным преимуществом обладает система с дополнительной автоматической РЛС. Однако по всем остальным показателям, таким как стоимость, потребляемая мощность, надежность и объем обслуживания, предлагаемая многокаскадная РЛС обладает несомненным преимуществом.
Результаты сравнительного анализа позволяют сделать вывод, что предлагаемая многокаскадная РЛС может служить в системе радиолокационного наблюдения полезным дополнением к существующим системам. Ее целеообразно использовать при наличии в зоне обзора РЛС затеняющих препятствий с небольшими по протяженности зонами затенения, расположенными по преимуществу в ближней зоне обзора и важными для контроля. Важным преимуществом применения предлагаемой многокаскадной РЛС является ее более высокая экологичность по сравнению с системой, использующей дополнительные РЛС, каждая из которых имеет круговой обзор и дополнительное круговое мощное излучение.
Рассмотрим примеры использования предлагаемой многокаскадной РЛС.
На фиг.5 приведен пример использования многокаскадной РЛС для расширения зоны обзора акватории морского порта. На фиг.5 обозначены: берега бухты, в которой расположен морской порт 1, акватория морского порта 2, антенна РЛС 3, размещенная на возвышенном мысе для обеспечения максимального обзора окружающего пространства, включая подходы к порту с моря и акваторию порта, основные портовые причалы 4, 5 и 6, выступающий высокий мыс, ограничивающий обзор РЛС 7, высокий остров, закрывающий часть морского пространства, 8, зоны тени на поверхности моря от препятствий 7 и 8 - 9 и 10, соответственно. Для обеспечения обзора пространства за препятствиями 7 и 8 на их вершинах установлены системы ретрансляторов Р1 и Р2, на расстояниях от антенны РЛС R1.
На подходе к порту и в порту находятся суда Cl - C7. Расстояния до закрытых препятствиями целей обозначены как Rц.
Находящиеся на подходе к порту суда С4 и C7 для антенны РЛС расположены в зонах тени 9 и 10, соответственно. Данные о наличии этих судов на подходе к порту на индикаторе обычной РЛС отсутствуют. В сложных метеорологических условиях это может привести к столкновению судов С4 и С5, а также судов С6 и C7.
Использование в данной обстановке предлагаемой в настоящей заявке многокаскадной РЛС с использованием систем ретрансляторов Р1 и Р2 обеспечивает непрерывное наблюдение всех целей в зонах тени 9 и 10, что обеспечивает безопасность плавания судов во всей зоне ответственности морского порта.
На фиг. 6 приведен пример использования предлагаемой многокаскадной РЛС для расширения зоны обзора речной диспетчерской системы. На фиг.6 обозначены: берега реки 1, русло реки 2, на берегу которой расположена пристань 3. На некотором расстоянии от пристани на реке расположен гористый и лесистый остров 4. На некотором расстоянии от причала 3 на возвышенности установлена антенна диспетчерской РЛС 5, предназначенная для обеспечения обзора окружающего пространства поверхности реки, включая подходы к причалу. За высоким островом 4 образуется закрытая для обзора РЛС часть речного пространства 6.
Для обеспечения обзора пространства за островом 4 на вершине острова установлена система ретрансляторов РР на расстоянии от антенны РЛС R1.
В районе причала 3 на водной поверхности реки находятся суда С1 - С4. Расстояние до закрытой препятствием цели С3 от ретранслятора РР обозначено как Rц.
Данные о наличии в зоне тени за островом 4 судна С3 на индикаторе обычной РЛС, антенна которой расположена в точке 5, отсутствуют. В сложных метеорологических условиях это может привести к столкновению судов С2 иС3.
Использование предлагаемой в настоящей заявке многокаскадной РЛС, с использованием системы ретрансляторов РР, обеспечивает непрерывное наблюдение всех целей в зоне тени 6, что обеспечивает полную безопасность плавания судов в зоне ответственности диспетчерской РЛС 5.
Приведенное описание предлагаемой многокаскадной РЛС позволяет сделать следующие заключение.
По сравнению с прототипом предлагаемая многокаскадная РЛС, при меньших дальностях обнаружения целей и большей массе, имеет следующие преимущества:
- высокую оперативность и точность получения информации о закрытых препятствиями целях, не отличающуюся от этих показателей для видимых целей;
- в два-три раза меньший объем обслуживания, особенно при использовании систем ретрансляции по первому и второму вариантам;
- большую, в числе дополнительно используемых РЛС в системе-прототипе, экологическую чистоту;
- меньшую стоимость оборудования, равную от 0,7 до 0,9 от стоимости прототипа;
- значительно меньшую мощность питания, составляющую от 0,5 до 0,9 мощности питания прототипа;
- большую надежность функционирования, особенно при использовании систем ретрансляторов по первым двум вариантам.
Предлагаемая многокаскадная РЛС с набором систем ретрансляторов трех основных типов значительно расширяет технические возможности РЛС наблюдения в части обеспечения незатененного обзора окружающего пространства.
Техническая реализация предлагаемой многокаскадной РЛС и систем ретрансляторов возможна, т.к. основана на использовании известных в радиотехнике принципов, технических решений и устройств.







Изобретение относится к области радиолокации, в частности к радиолокационным станциям (РЛС) освещения обстановки. Сущность изобретения состоит в том, что в центральный пост освещения обстановки предложено устанавливать на вершинах затеняющих препятствий системы ретрансляторов радиолокационных сигналов, осуществляющие ретрансляцию, с указанием или без усиления, прямых и отраженных сигналов от РЛС в сторону закрытых препятствием целей и обратно, обеспечивая тем самым обнаружение целей за препятствиями, в области тени. Достигаемым техническим результатом является обеспечение беззатененного обзора окружающего пространства. 4 з.п.ф-лы, 6 ил., 13 табл.
| ПЕСКОВ Ю.А | |||
| Использование РЛС в судостроении | |||
| - М.: Транспорт, 1986, с | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЗЕМНЫХ ПРЕПЯТСТВИЙ ПРИ ПОЛЕТЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА МАЛОЙ ВЫСОТЕ | 1997 |
|
RU2128846C1 |
| US 4727374, 23.02.1988 | |||
| US 5280286 А, 18.01.1994 | |||
| US 4899156, 06.02.1990. | |||

