Изобретение относится к области измерительной техники и может быть использовано для автоматизированного контроля технического состояния букс подвижного состава железнодорожного транспорта.
В настоящее время в связи с ростом скоростей движения рельсового транспорта с одной стороны и старением подвижного состава - с другой актуальной становится задача объективного контроля за техническим состоянием железнодорожного подвижного состава. Одними из наиболее нагруженных узлов железнодорожного вагона являются буксы колесных пар, требующие постоянного контроля. Проводимые периодические осмотры вагонов на станциях требуют значительных временных затрат, что существенно увеличивает время в пути. При этом при осмотрах присутствует элемент субъективизма, т.к. качество осмотра зависит от квалификации осмотрщика вагонов, количества обслуживаемого персонала и т.п. Для исключения элементов субъективизма необходим постоянный мониторинг за состоянием букс в течение всего времени их эксплуатации.
Известна методика визуального контроля сдвига буксы в наружную сторону путем выявления зазора между корпусом буксы и лабиринтным кольцом, осуществляемая тщательным обследованием каждой буксы состава (см. Амелина А.А. Устройство и ремонт вагонных букс с роликовыми подшипниками. - М.: Транспорт, 1975 г., стр.97). Данная методика не может быть использована для объективного и производительного контроля, т.к. требует большего количества квалифицированного персонала и проводится в статическом режиме. Известно, что максимальный зазор возникает при движении колесной пары на криволинейном участке дороги для той из букс, которая движется по наибольшему радиусу, т.к. при этом возникает центробежная сила, стягивающая буксу, а при остановке состава указанный зазор не всегда соответствует истинному значению.
Наиболее близким к заявляемому устройству (прототипом) является устройство, описанное в патенте на изобретение «Способ мониторинга состояния буксы колесной пары» (см. патент РФ №2258017, кл. B61K 9/00, 2005 г.). Устройство является одной из реализации известного способа и включает жесткую платформу, охватывающую железнодорожный путь с размещенными на ней четырьмя оптическими дальномерами, при этом каждая пара жестко геометрически привязана друг к другу и контролирует одно из колес колесной пары: внутренний дальномер отслеживает координату внутренней поверхности колеса, а наружный - текущую координату положения его буксы. При этом блок обработки информации рассчитывает истинный размер колеса с буксой и, сравнивая полученный размер с эталонным, делает вывод о сползании буксы.
Основным недостатком известного технического решения является наличие жесткой платформы, охватывающей железнодорожный путь. При движении состава, она подвергается вибрации и деформации, что не может не сказываться на точности измерения положения буксы.
Кроме того, указанных платформ должно быть не менее двух. Одна для контроля правой буксы на криволинейном участке, где правое колесо идет по большему радиусу, другая - для контроля левой буксы, когда левое колесо идет по большему радиусу. Таким образом, система контроля значительно усложняется, а ее стоимость существенно повышается.
Технической задачей, решаемой настоящим техническим решением, является устранение указанных недостатков, а именно повышение точности измерения сползания буксы при одновременном упрощении конструкции устройства и удешевлении его стоимости.
Указанная техническая задача в устройстве для дистанционного контроля состояния буксы колесной пары, включающем четыре оптических дальномера по два на каждое колесо, соединенных с блоком обработки информации, при этом один из дальномеров установлен на уровне буксы колеса, а другой - на уровне его боковой поверхности, решена тем, что оба оптических дальномера одного колеса расположены с его внешней стороны на единой вертикальной опоре, которая установлена на демпфирующее основание и расположена на криволинейном участке железнодорожного полотна со стороны колеса, движущегося по большему радиусу.
Указанное выполнение устройства позволяет отказаться от общей жесткой платформы, охватывающей весь железнодорожный путь, и вынести оба дальномера, контролирующие положение буксы одного из колес, на наружную сторону этого колеса. При этом появилась возможность их максимально отнести от железнодорожного пути, тем самым снизить вибрации в месте дистанционного контроля. Для дополнительного снижения вибрации, опора, на которой расположены оптические дальномеры, установлена на демпфирующее основание.
Таким образом, расположение обоих дальномеров с наружной стороны колеса на единой опоре позволяет существенно снизить влияние вибрации и упростить конструкцию устройства в целом, что не имеет аналогов среди устройств, предназначенных для контроля сползания буксы во время движения состава, а значит, соответствует критерию «изобретательский уровень».
На чертеже представлена схема реализации заявляемого устройства для контроля буксы правого колеса колесной пары.
Устройство включает: железнодорожную насыпь 1 со шпалой 2 и рельсами 3; колесную пару с колесами 4 и буксами 5; вертикальную опору 6 с двумя оптическими дальномера 7 и 8 со сканирующими лучами 9 и 10; блок обработки информации 11, соединенный с дальномерами и подключенный к компьютеру 12.
Устройство работает следующим образом. При движении колесной пары по рельсам 3 она попадает в поле зрения оптических дальномеров 7 и 8, которые своими световыми лучами 9 и 10 сканируют одновременно наружную поверхность колеса 4 и буксы 5. Оптический дальномер 7, сканируя лучом 9, формирует текущую координату наружной поверхности колеса 4, а оптический дальномер 8, сканируя лучом 10, формирует текущую координату положения его буксы. Сигнал от оптического дальномера 7 используется в качестве базового сигнала, необходимого для привязки начала координат оптического дальномера 8, т.к. наружная поверхность колеса выбрана в качестве базовой поверхности для определения координат положения буксы. Перед началом измерений производят юстировку оптических дальномеров, т.е. производят точное определение их координат относительно измеряемого колеса. Эту величину вносят в качестве постоянной поправки в блок обработки информации 11. Перед началом измерений текущих координат для каждого из колес колесной пары состава из блока 11 по сигналу магнитной педали (не показана) поступает сигнал на включение оптических дальномеров. Сигналы с оптических дальномеров 7 и 8 в виде набора текущих координат точек сканируемых поверхностей поступают на блок обработки информации 11, где из них формируют законченный профиль (с учетом поправки) наружной поверхности колеса и профиль буксы. После определения указанных профилей их сравнивают с эталонными профилями, хранящимися в памяти компьютера, и делают отметку о состоянии буксы. Текущая координата разности дальностей однозначно показывает величину сдвига буксы. Полученные данные о величине сдвига буксы каждого колеса каждой колесной пары состава поступают в компьютер 12. Осмотрщики ближайшего пункта технического обслуживания вагонов на основании полученной информации идентифицируют указанные колесные пары и при необходимости производят ремонт их букс или замену колесных пар.
Таким образом, заявляемое устройство позволяет своевременно выявлять неисправные буксы непосредственно в процессе эксплуатации подвижного состава и тем самым снижать аварийность на железнодорожном транспорте, связанную с эксплуатацией неисправных букс.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ БУКСЫ КОЛЕСНОЙ ПАРЫ | 2003 |
|
RU2258017C2 |
| СИСТЕМА ДИАГНОСТИЧЕСКОГО КОНТРОЛЯ СОСТОЯНИЯ БУКС КОЛЕСНОЙ ПАРЫ И СПОСОБ ДИАГНОСТИЧЕСКОГО КОНТРОЛЯ СОСТОЯНИЯ БУКС КОЛЕСНОЙ ПАРЫ С ЕЕ ПОМОЩЬЮ | 2023 |
|
RU2811187C1 |
| СПОСОБ МОНИТОРИНГА ПАРАМЕТРОВ КОЛЕСНОЙ ПАРЫ И ЕЕ ПОЛОЖЕНИЯ ОТНОСИТЕЛЬНО РЕЛЬСОВОГО ПУТИ | 2003 |
|
RU2266226C2 |
| СПОСОБ МОНИТОРИНГА ПЕРЕМЕЩЕНИЙ БУКСЫ | 2009 |
|
RU2453458C2 |
| СИСТЕМА ДИАГНОСТИЧЕСКОГО КОНТРОЛЯ СОСТОЯНИЯ ПОВЕРХНОСТЕЙ КАТАНИЯ КОЛЕС КОЛЕСНОЙ ПАРЫ И СПОСОБ ДИАГНОСТИЧЕСКОГО КОНТРОЛЯ СОСТОЯНИЯ ПОВЕРХНОСТЕЙ КАТАНИЯ КОЛЕСНОЙ ПАРЫ С ЕЕ ПОМОЩЬЮ | 2023 |
|
RU2811175C1 |
| АВТОМАТИЗИРОВАННАЯ ДИАГНОСТИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕМЕНТОВ ПОДВЕСКИ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2015 |
|
RU2578620C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114950C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2010 |
|
RU2442713C1 |
| Устройство для контроля состояния рельсового пути и для определения его пространственных координат | 2022 |
|
RU2793310C1 |
| СИСТЕМА СЛЕЖЕНИЯ ЗА АВАРИЙНО ГРЕЮЩИМИСЯ РОЛИКОВЫМИ БУКСОВЫМИ УЗЛАМИ КОЛЕСНЫХ ПАР ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2007 |
|
RU2337029C1 |
Изобретение относится к области измерительной техники и может быть использовано для автоматизированного контроля технического состояния букс подвижного состава железнодорожного транспорта. Устройство включает четыре оптических дальномера по два на каждое колесо, соединенных с блоком обработки информации. Один из дальномеров установлен на уровне буксы колеса, а другой - на уровне его боковой поверхности. Оба оптических дальномера одного колеса расположены с его внешней стороны на единой вертикальной опоре, которая установлена на демпфирующее основание и расположена на криволинейном участке железнодорожного полотна со стороны колеса, движущегося по большему радиусу. Достигается повышение точности измерения сползания буксы. 1 ил.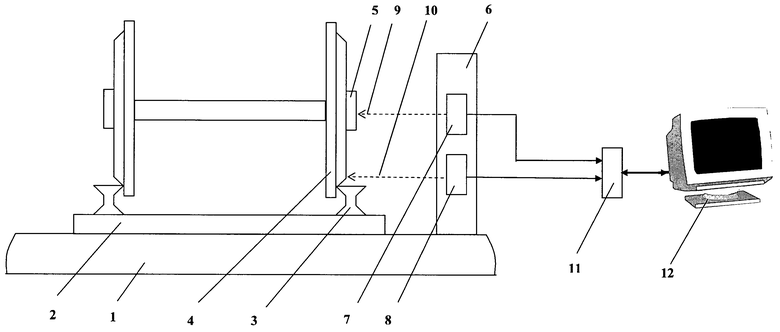
Устройство для дистанционного контроля состояния буксы колесной пары, включающее четыре оптических дальномера по два на каждое колесо, соединенных с блоком обработки информации, при этом один из дальномеров установлен на уровне буксы колеса, а другой - на уровне его боковой поверхности, отличающееся тем, что оба оптических дальномера одного колеса расположены с его внешней стороны на единой вертикальной опоре, которая установлена на демпфирующее основание и расположена на криволинейном участке железнодорожного полотна со стороны колеса, движущегося по большему радиусу.
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ БУКСЫ КОЛЕСНОЙ ПАРЫ | 2003 |
|
RU2258017C2 |
| ЕР 1753650 В1, 28.11.2007 | |||
| US 5247338 А, 21.09.1993 | |||
| US 5793492 А, 11.08.1998 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

